




Flywoo GOKU GM10 Nano V3 GPS-modul med kompass, M10050 GNSS, 2,6g, 12x17x5mm, 6-stifts
Flywoo GOKU GM10 Nano V3 GPS-modul med kompass, M10050 GNSS, 2,6g, 12x17x5mm, 6-stifts
FLYWOO
Det gick inte att ladda hämtningstillgänglighet
Översikt
Baserat på den angivna informationen använder GM10 V3-serien den senaste M10050 GNSS-chippet för snabbare satellitsökning jämfört med den tidigare GM8 V2. För hjälp med installation eller kompatibilitetsfrågor, kontakta [email protected] or besök https://rcdrone.top/ .
Nyckelfunktioner
- Nano-storlek och låg vikt: 2,6 g
- Integrerad kompass
- Plug and play (ingen lödning krävs)
- 6-pins pad-kontakt
- GPS-modul. Tre moduler.
Kompatibilitetsnoteringar
- Obs: Chippet av GOKU GM10 V3 GPS refereras som M1005 i den angivna noten. Endast Betaflight (BF) 4.3.x firmware kan använda Ublox protokollet. BF 4.2.x och tidigare kan endast använda NMEA protokollet. Noten anger att det inte finns någon prestandaskillnad mellan de två protokollen.
- BETAFLIGHT: använd firmware över 4.3.0.
- INAV: använd den senaste 6.0.0 konfigureraren, och firmware över 5.0.0.
Specifikationer
| Varumärke | FLYWOO |
| Modell | GM10 NANO V3 GPS m/kompass |
| Mått | 12mm*17mm*5mm |
| Vikt | 2.6g |
| Kontakt | 6pins Pad |
| Chipset | M10050 (Tionde generationens chip) |
| Mottagningsformat | GPS, GLONASS, Galileo, BeiDou, QZSS och SBAS |
| Standardprotokoll | GPS, Galileo, BeiDou |
| Frekvens | GPS L1, GLONASS L1, BeiDou B1, SBAS L1, Galileo E1 |
| Kanal | 72 sökkanaler |
| Känslighet (spårning) | -162dBm |
| Känslighet (återanskaffning) | -160dBm |
| Stödhastighet | 4800bps till 921600bps (Standard 115200bps) |
| Data nivå | TTL eller RS-232 (Standard TTL-nivå) |
| Dataprotokoll | BF4.3.X (UBLOX) / BF4.2.X (NMEA) |
| Utgångsfrekvens | 1Hz-10Hz (Standard 10Hz) |
| Operativ gräns (Höjd) | 50,000m Max |
| Operativ gräns (Hastighet) | 500m/s Max |
| Operativ gräns (Acceleration) | Mindre än 4g |
| VCC | DC Spänning: 3.3-5V |
| Driftstemperatur | -40 °C ~ +85°C |
| Lagringstemperatur | -40°C ~ +105°C |
| Indikator | PPS LED: RÖD. PPS LED lyser när GPS:en inte är fixad och släcks när den är fixad. |
| Modulstift (text) | RX, TX, 3.3-5V, GND |
| Kompass/GPS Pad Etiketter (diagram) | T, R, G, V, C, D |
| Flygkontroller Pad Etiketter (diagram) | TX, RX, GND, 5V, SCL, SDA |
| GM10 NANO V3 (KOMPASS) Etikett (diagram) | SD-SC-V-G-RX-TX |
Bruksanvisning
Kompassriktning alternativ (visade)
- Standard
- CW 0°
- CW 90°
- CW 180°
- CW 270°
- CW 0° flip
- CW 90° flip
- CW 180° flip
- CW 270° flip
- Anpassad
Betaflight GPS och GPS Räddningsläge Inställningar (visade)
- Öppna seriell port: GPS / 115200 baud rate.
- Slå på GPS-brytaren och ställ in UBLOX/NMEA protokoll.
- Ställ in RXLOSS kontrollräddningsläge kanal (exempel visas: AUX 2 GPS RÄDDNING , värde 2000).
- Välj GPS räddningsläge alternativ (exempelvärden visas): Vinkel 32; Initial höjd (meter) 50; Fallavstånd (meter) 200; Minimalt avstånd till hemmet (meter) 100; Markhastighet (meter/sekund) 20.00; Gas minimum 1100; Gas maximum 1600; Gas sväva 1280; Stigfart (meter/sekund) 5.00; Fallfart (meter/sekund) 1.50; Minimala satelliter 5; Höjdläge Maximal höjd; Sanitetskontroller På.
Vad som ingår
- 1x GM10 NANO V3 GPS med kompass
- 1x 100mm Kabel
- 1x Kopparfolie
Detaljer
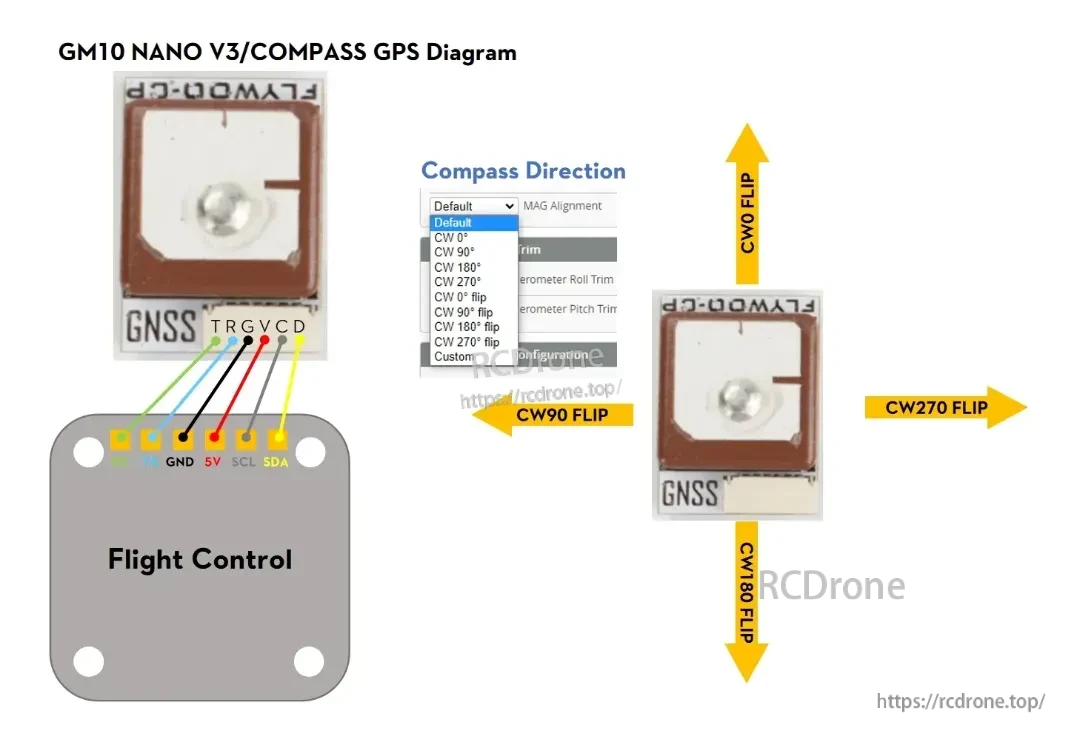
GM10 Nano V3 GPS-koppling använder TX/RX plus 5V och I2C (SCL/SDA), med kompassriktning alternativ för olika modulorienteringar.

Flywoo GOKU GM10 Nano V3 GPS ansluts till flygkontrollern med 5V och GND ström plus UART TX/RX, med valfri SDA/SCL för kompassen.

Flywoo GOKU GM10 Nano V3 GPS är designad för snabbare satellitsökning och stöder spårning av upp till 30+ satelliter.

Ställ in GPS-serieporten på 115200 baud och aktivera GPS-brytaren med UBLOX/NMEA-protokoll för inställning av räddningsläge.

GPS räddningsläge kan ställas in genom att tilldela en AUX-kanal för GPS RESCUE och justera parametrarna för Återvända till hemmet i Betaflight.
Related Collections




