



SteadyWin DD4015 Motor 24V RS485/CAN Absolut Encoder 14bit 0,25 N.M 125rpm 114g -20~80℃
SteadyWin DD4015 Motor 24V RS485/CAN Absolut Encoder 14bit 0,25 N.M 125rpm 114g -20~80℃
SteadyWin
Ordinarie pris
$152.00 USD
Ordinarie pris
Försäljningspris
$152.00 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
SteadyWin DD4015-motorn är en kompakt motor med RS485 / CAN-kommunikation och en enkelvarvs absolut encoder (14bit). Den är specificerad för 24V nominell drift (10~28V intervall) och är lämplig för robotikaktivering där sluten loop positionsåterkoppling krävs.
Nyckelfunktioner
- Kommunikation: RS485 / CAN
- Encoder: Enkelvarvs absolut, 14bit upplösning
- Nominellt vridmoment: 0.25 N.M; toppeffekt: 0.35 N.m
- Nominell hastighet: 125 rpm; max hastighet utan belastning: 1013 rpm
Tekniska specifikationer
| Parameter | Värde |
|---|---|
| Nominell spänning | 24V |
| Spänningsintervall | 10~28V |
| Nominell ström | 1.2A |
| Nominell effekt | 28.8W |
| Nominellt vridmoment | 0.25N.M |
| Nominell hastighet | 125rpm |
| Max hastighet utan belastning | 1013 rpm |
| Spetsmoment | 0.35 N.m |
| Spetsström | 1.85A |
| Hastighetskonstant | 42.21rpm/v |
| Momentkonstant | 0.17N.M/A |
| Antal polpar | 11Par |
| Fasresistans | 12.57Ω |
| Fasinduktans | 2.48Mh |
| Kommunikation | RS485 / CAN |
| Encoder typ | Enkelvarv absolut |
| Upplösning | 14bit |
| Motors vikt | 114g |
| Arbetstemperatur | -20~80℃ |
Mechanisk / Installation (från ritning)
- Modellbeteckning: DD4015
- Yttre diameter: Ø40 ±0.1
- Total längd: 33 ±0.1
- Längdsegment: 12.4 och 20.1
- Axeldiameter: Ø5
- Framsidans mönster: Ø20; 4-M3 (djup ▽3); Ø13.6 (+0.05/0) (djup ▽2); Ø12.6 (+0.1/0) (djup ▽12)
- Baksidans mönster: Ø33; 4-M3 (djup ▽4.5)
- Kontakt: SH1.0-8PIN
- SH1.0-8PIN-signaler: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Tillämpningsscenarier
- Humanoida robotar
- Robotarmar
- Exoskelett
- Kvadrupedrobotar
- AGV-fordon
- ARU-robotar
Dokument
För hjälp med kablage, integration eller beställning, kontakta [email protected] or besök https://rcdrone.top/.
Detaljer
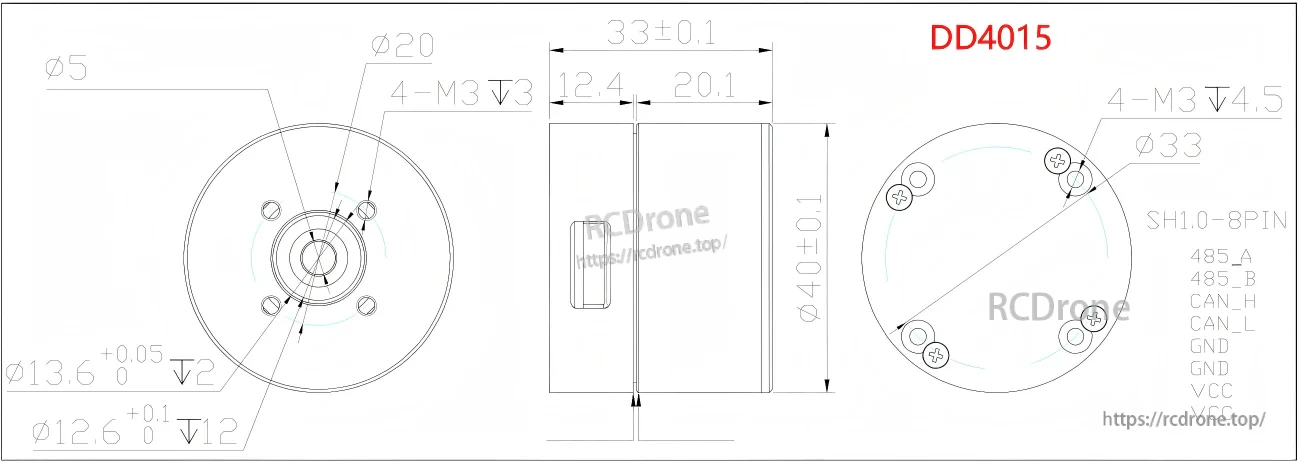
Mechaniska dimensioner och monteringshålsmönster för DD4015, plus SH1.0 8‑pin kontaktpinout för RS485 och CAN-kablar.
Related Collections



