SteadyWin GIM4305-10 Planetväxel Motor — 48W, 10:1 utväxling, 1 N·m nominellt vridmoment, 300–366 RPM, CAN, IP54 för robotaktuatorer
SteadyWin GIM4305-10 Planetväxel Motor — 48W, 10:1 utväxling, 1 N·m nominellt vridmoment, 300–366 RPM, CAN, IP54 för robotaktuatorer
SteadyWin
Det gick inte att ladda hämtningstillgänglighet
Översikt
SteadyWin GIM4305-10 Planetary Reducer Motor är en kompakt planetväxelmotor med en integrerad SDC101-drivrutin och CAN-kommunikation. Designad för precisionsaktivering, fungerar enheten vid en nominell spänning på 24V (12-36V intervall), levererar 48W effekt och ger ett nominellt vridmoment på 1 N·m (stallvridmoment 3,47 N·m) efter en 10:1 reduktion. GIM4305-10 är klassad IP54 och stöder en 14-bitars encoder och separat encoderanslutning; anpassat bromsstöd finns tillgängligt. Inbyggda skydd inkluderar övertemperatur, överspänning och överbelastningsövervakning.
För kundservice och teknisk support, kontakta: [email protected] eller besök https://rcdrone.top/.
Nyckelfunktioner
- Planetväxel, 10:1 för ökat utgångsvridmoment och positionskontroll.
- Integrerad SDC101-drivrutin med CAN-kommunikation för nätverkskontroll.
- Nominell hastighet efter reduktion 300 RPM, max 366 RPM.
- Encoder: 14-bit inbyggd, stöder separat encoder-ingång.
- Kompakt kuvert Ø53×26mm och låg vikt (140g utan drivrutin; 150g med drivrutin).
- Mechaniska specifikationer: max axiell belastning 125N, max radial belastning 500N, växelspel 15 arcmin.
- Driftstemperaturintervall -20°C till +80°C och akustiskt brus <60 dB.
- Reducer växelmaterial: ALU eller STÅL. Anpassat bromsstöd tillgängligt.
Specifikationer
| Modell | GIM4305-10 |
| Drivermodell | SDC101 |
| Nominell spänning | 24V (12-36V intervall) |
| Effekt | 48W |
| Nominellt vridmoment (efter reduktion) | 1 N·m |
| Stallmoment | 3.47 N·m |
| Nominell hastighet (efter reduktion) | 300 RPM |
| Max hastighet (efter reduktion) | 366 RPM |
| Nominell ström | 2A |
| Stilleståndsström | 5.6A |
| Fasresistans | 1.15 Ω |
| Fasinduktans | 0.41 mH |
| Hastighetskonstant | 15.25 rpm/v |
| Momentkonstant | 0.62 N·m/A |
| Antal Polpar | 14 Par |
| Utväxling | 10:1 |
| Växeltyp | Planetär |
| Reducer Växelmaterial | ALU eller STÅL |
| Reducer Växelspel | 15 arcmin |
| Motorvikt (utan drivrutin) | 140 g |
| Motorvikt (med drivrutin) | 150 g |
| Storlek (utan drivrutin) | Ø53×26 mm |
| Storlek (med drivrutin) | Ø53×26 mm |
| Max Axial Belastning | 125 N |
| Max Radial Belastning | 500 N |
| Brus | <60 dB |
| Kommunikation | CAN |
| Andra Encoder | NEJ |
| Skyddsnivå | IP54 |
| Driftstemperatur | -20°C till +80°C |
| Encoderupplösning | 14 Bit |
| Separat encoderstöd | JA |
| Anpassat bromsstöd | JA |
Tillämpningar
- Humanoida robotar och robotleder
- Robotarmar och aktiveringsmoduler
- Exoskelett och bärbara hjälpmedel
- Fyra-benta robotar och benleder
- AGV-drivmoduler och mobil robotik
- Öppen källkod robotprojekt (e.g., Pupper V3-integration)
Manualer
- GIM4305-10SHS Installationsdiagram (PDF)
- GIM4305 Motorgränssnitt Schematisk diagram (PDF)
- SteadyWin_GIM4305_10.stp
Detaljer
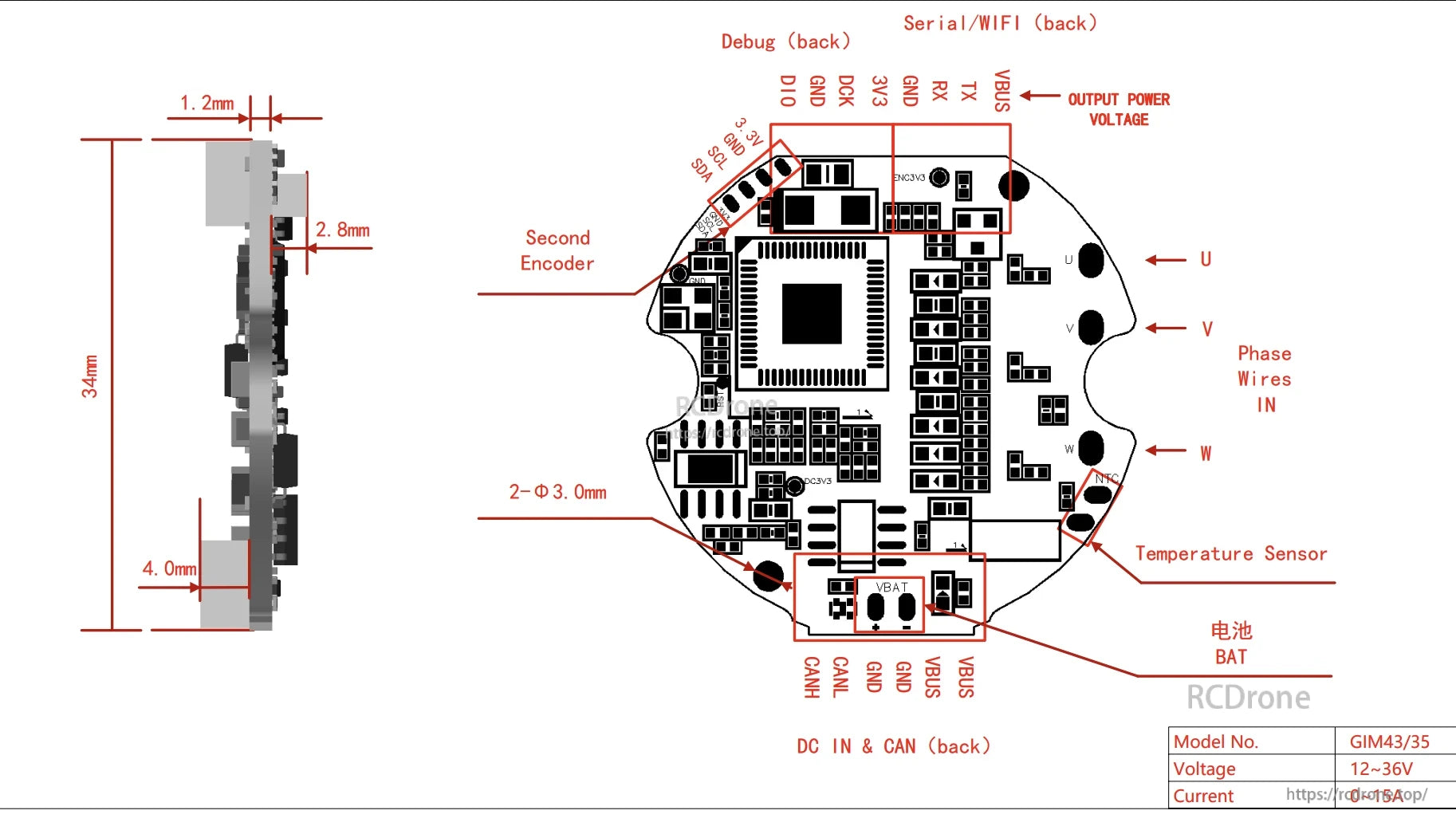
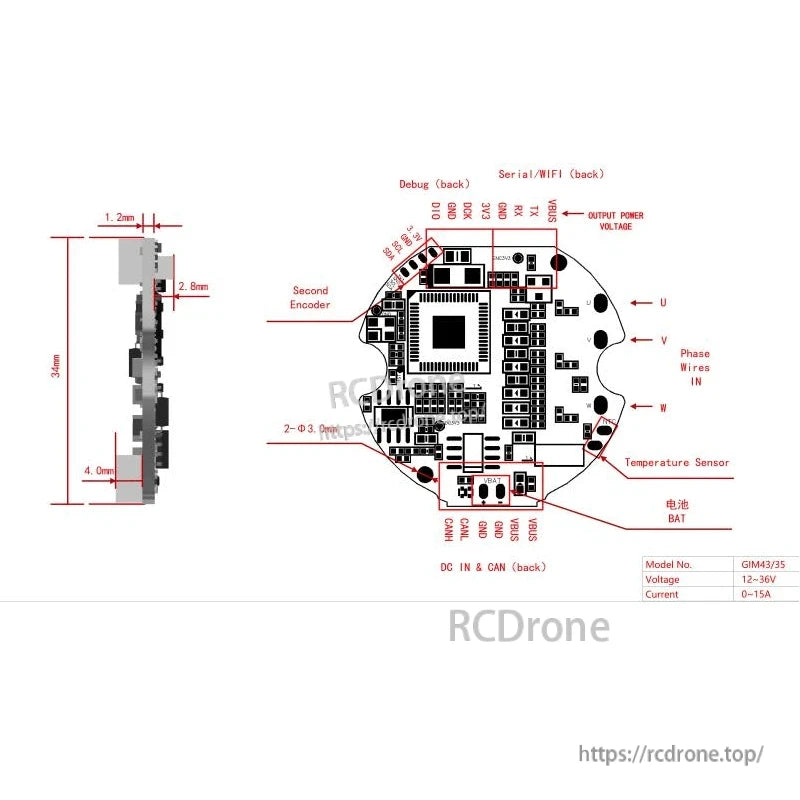
SteadyWin GIM43/35 motor PCB-diagram visar anslutningar, dimensioner och komponenter—enkodrar, fasledningar, temperatursensor, batteriingång, debug-portar—som arbetar vid 12–36V och 0–15A ström.
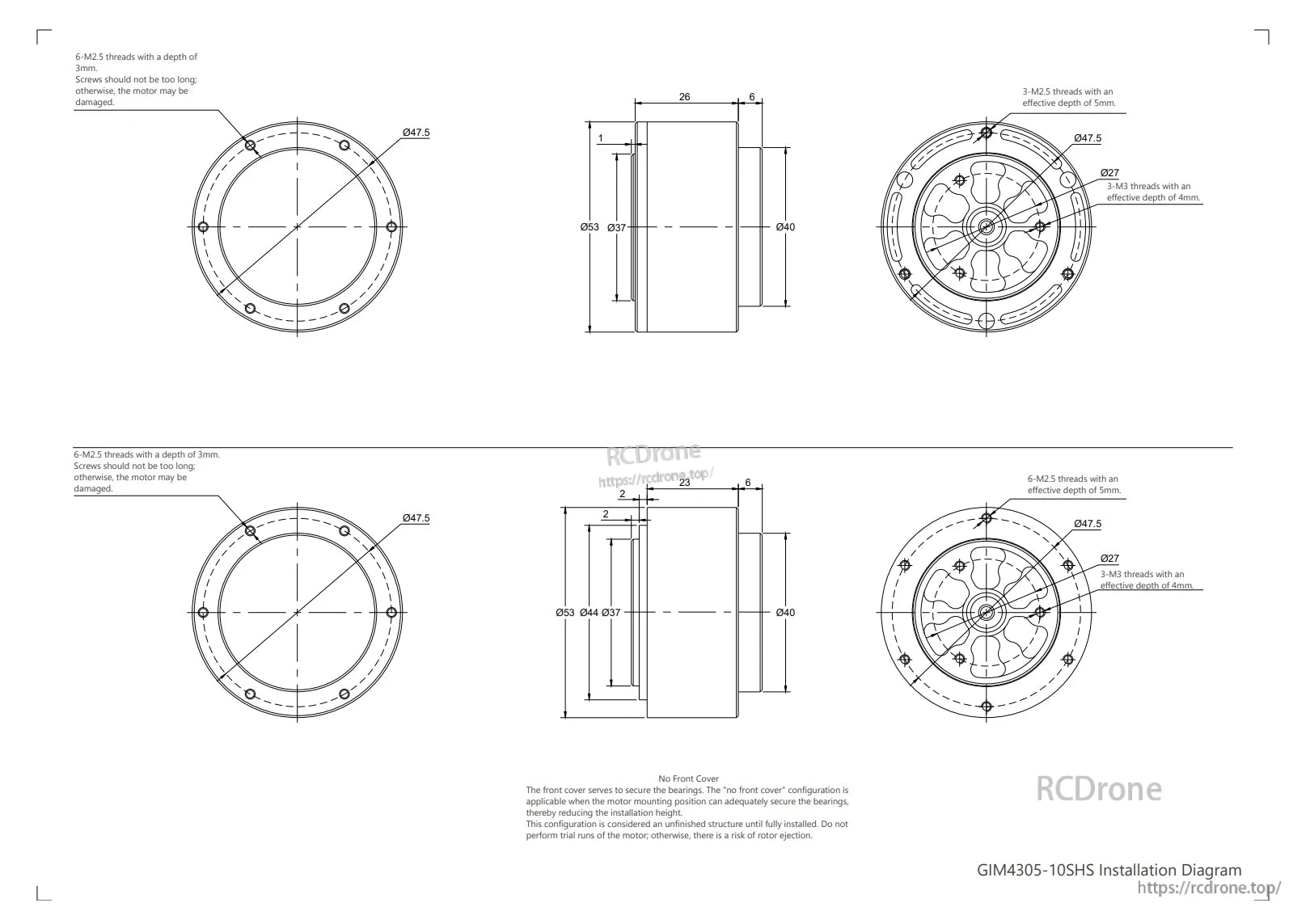
Tekniskt diagram för GIM4305-10SHS motorinstallation visar dimensioner, gängspecifikationer, skruvlängdsvarningar för att förhindra skador och konfigurationer med och utan frontlock.
Related Collections