STM32 Open Source Quadcopter DIY Kit - Laser Optical Flow Student Learning Board PCB + PID Parameter Debugging Rack
STM32 Open Source Quadcopter DIY Kit - Laser Optical Flow Student Learning Board PCB + PID Parameter Debugging Rack
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
De STM32 DIY Quadcopter Kit med öppen källkod är en heltäckande lösning för studenter, hobbyister och utvecklare som vill ha praktisk erfarenhet av drönarprogrammering, flygdynamik och hårdvaruutveckling. Med en STM32F103C8T6 mikrokontroller, MPU6050 6-axligt gyroskop, och NRF24L01 trådlös modul, denna quadcopter är utrustad med banbrytande teknologier för smidig och stabil flygning. Dess optisk flödesstabilisering kombinerat med barometertrycksensorer säkerställer exakt höjdhållning och positionslåsning, medan öppen källkod C firmware tillåter användare att ändra flygalgoritmer. Med anpassningsbara IO-portar, trådlös PID-parameterinställning, och stöd för sekundär utveckling Med Keil MDK5 ger denna quadcopter oöverträffad mångsidighet för både nybörjare och avancerade användare. En kraftfull 3,7V 1200mAh batteri garanterar upp till 10 minuters flygtid, och den lätta 320mm x 230mm ram är designad för stabilitet och bärbarhet. Det medföljande PID-felsökningsstället förbättrar inlärningsupplevelsen ytterligare, vilket gör detta kit idealiskt för utbildningsprojekt, tävlingar och drönareentusiaster.
Nyckelfunktioner
-
Flygkontrollprecision:
- Utrustad med STM32F103C8T6 mikrokontroller och MPU6050 gyroskop för pålitlig flygdynamik.
- Optisk flödesmodul (PMW3901) och barometrisk sensor (SPL06-001) möjliggör exakt positionshållning och höjdstabilisering (20cm–400cm).
-
Öppen källkod och programmerbarhet:
- Helt öppen källkodsfirmware inskriven standard C för enkel sekundär utveckling.
- Kompatibel med Keil MDK5 miljö för avancerade programmeringsprojekt.
-
Trådlös kontroll:
- Har en NRF24L01 trådlös modul stöder ett kontrollavstånd på 50m+ i öppna miljöer.
- Trådlös PID-parameterjustering för X, Y, Z-axlar förenklar flygoptimering.
-
Robust hårdvarudesign:
- Slitstark ram med 8520 borstade motorer och 13,5 cm propellrar för stabila flygningar inomhus och utomhus.
- Lättviktsdesign (100g inklusive batteri) stöder nyttolaster upp till 60 g, vilket gör den lämplig för att lägga till sensorer eller kameror.
-
Förbättrade inlärningsverktyg:
- Inkluderar en PID-felsökningsställ för finjustering av PID-parametrar.
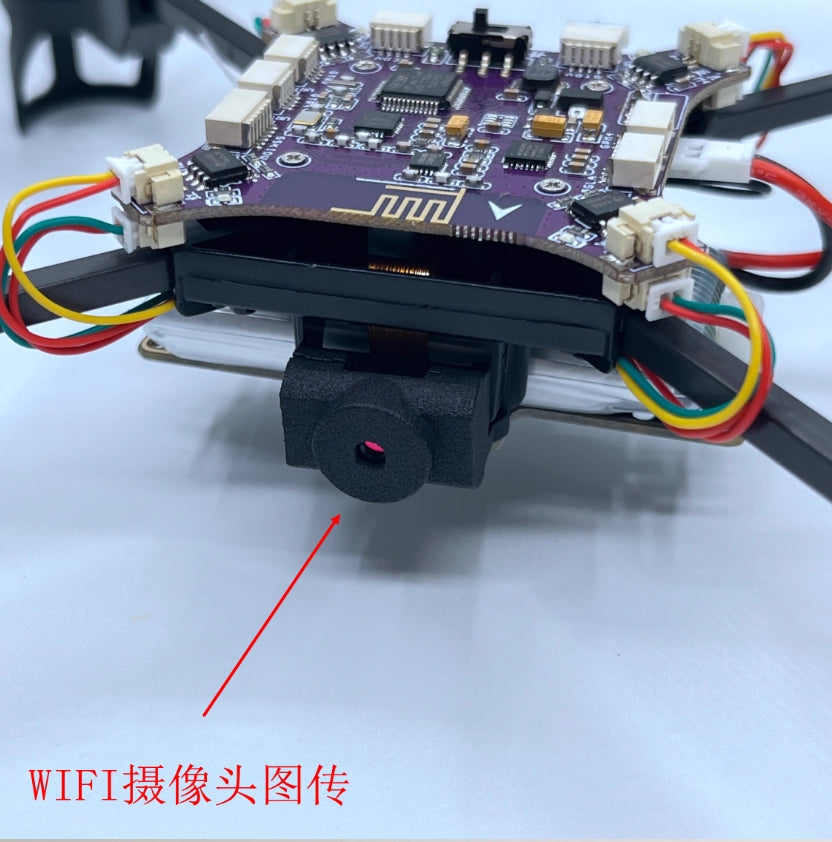
- Förlödda IO-portar stöder tillägg som Wi-Fi-kameragränssnitt, SPI, UART, och IIC-moduler.
-
Kraftfullt batterisystem:
- Inkluderar 3,7V 380mAh och 3,7V 1200mAh batterier, som erbjuder flygtider på 5 till 10 minuter beroende på nyttolast och förhållanden.
- Inbyggt skydd mot överladdning och urladdning säkerställer batterisäkerhet.
-
Plug-and-Play-anslutning:
- USB HID-anslutning för dataöverföring i realtid och parameterjusteringar via datorgränssnitt.
- Enkelt att använda SWD-programmeringsgränssnitt som stöder båda J-Link och ST-Link felsökare.
Tekniska specifikationer
Quadcopter
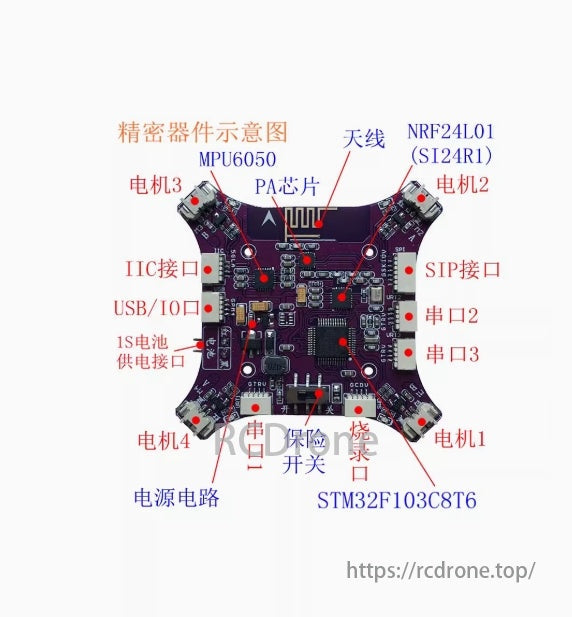
- Huvudchip: STM32F103C8T6
- Gyroskop: MPU6050 (6-axlig)
- Trådlös modul: NRF24L01 (SI24R1)
- Motordrivare: AO3400 (A09T)
- Motorer: 8520 borstade motorer
- Propellrar: 13,5 cm (4 ingår)
- Sensorer: SPL06-001 (barometer), PMW3901 (optiskt flöde)
- Batteri: 3,7V 1200mAh (10 min flygning) + 3,7V 380mAh (5 min flygning)
- Vikt: 100g (inklusive batteri)
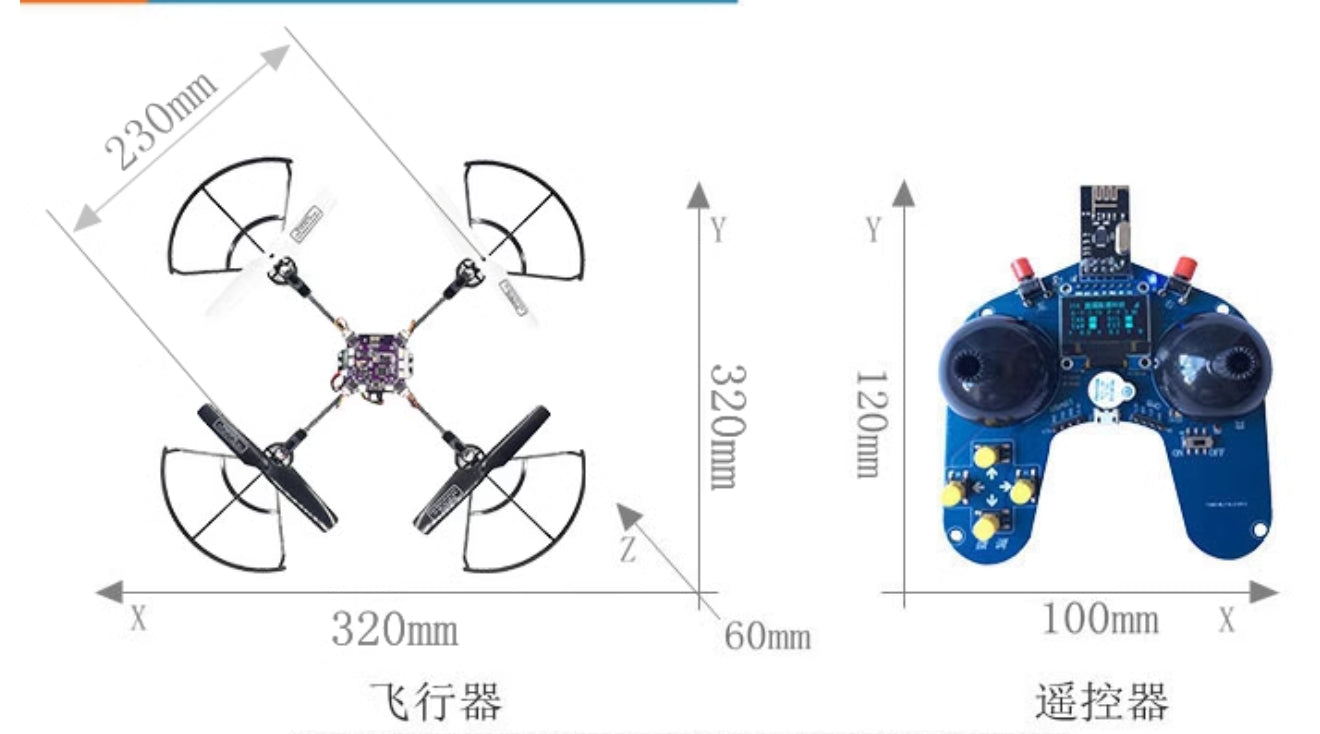
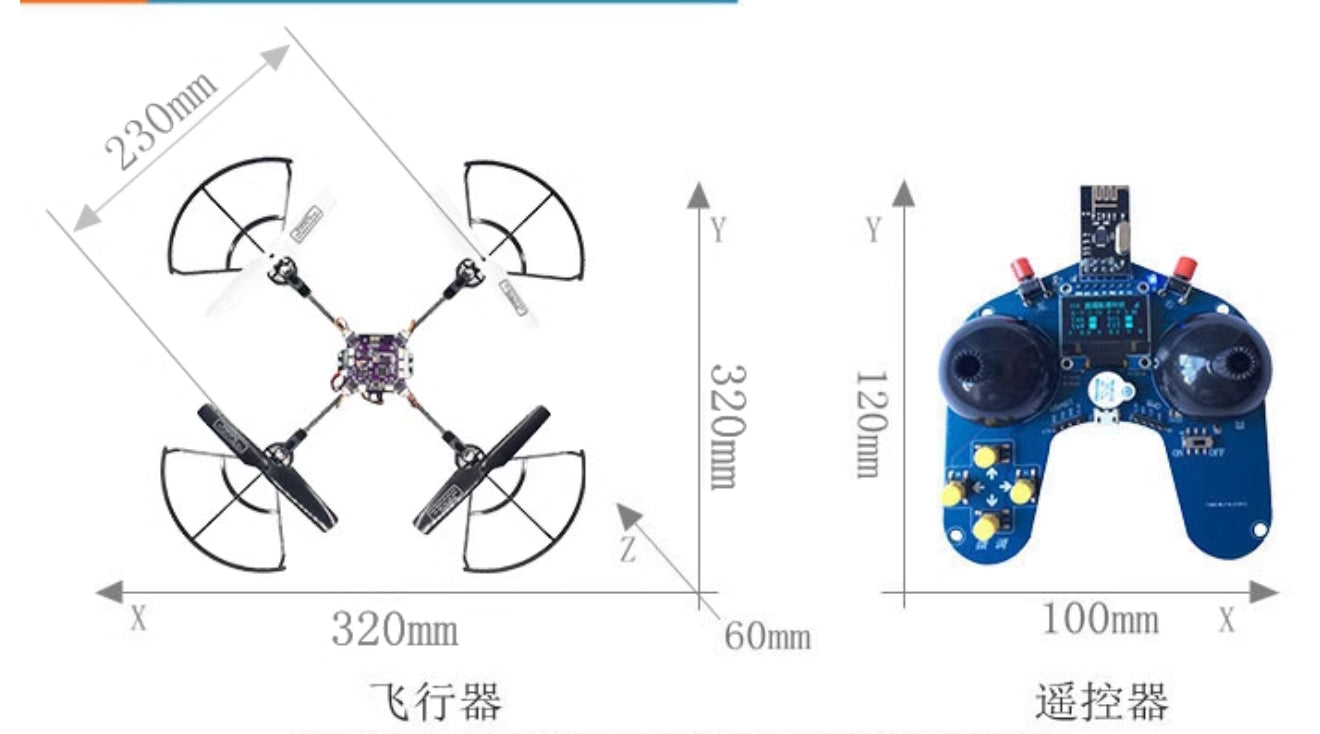
- Ramstorlek: 320 mm x 230 mm
- Ytterligare portar: SPI x1, UART x2, IIC x1, USB IO x1
- Lastkapacitet: 60 g
Fjärrkontroll
- Huvudchip: STM32F103C8T6
- Trådlös modul: NRF24L01 (SI24R1)
- Visa: 0,96-tums OLED
- Driva: 3,7V 380mAh batteri
- Kontrollavstånd: >50m (öppet fält)
- Storlek: 12 cm x 10 cm
- Vikt: 60 g
- Ytterligare funktioner: Kalibreringsknappar, visualiserat PID-inställningsgränssnitt
Paketets innehåll
- Quadcopter ram med förmonterad elektronik (STM32F103C8T6-baserad flygkontroll, MPU6050, SPL06-001, PMW3901).
- STM32 trådlös fjärrkontroll (med OLED-display och NRF24L01-modul).
- Batterier:
- 3,7V 1200mAh litiumbatteri x1 (10 minuters flygtid)
- 3,7V 380mAh litiumbatteri x1 (5 minuters flygtid)
- Reservpropellrar (4st)
- USB-laddningskabel (3,7V–4,2V kompatibel)
- Bygeltrådar (blandad)
- Precisionsskruvmejsel
- PID Debugging Rack
- Omfattande användarmanual och handledning (PDF och video).
Ytterligare funktioner markerade
- Exakt komponentplacering: Varje löddel är märkt, inklusive portar för ström, SPI, IIC, USB och motorkontakter.
- Modulära felsökningsverktyg: Optiskt flöde och barometrisk sensorplacering säkerställer exakta flygdata för PID-justering.
- Utvecklingskortsförlängningar: Tillåter integrering av kameror och sensorer för flygfotografering och videoinspelning.
- Visualiserat gränssnitt: Quadcopter-data visas i realtid via PC-mjukvara för felsökning och optimering.
Applikationer:
- Utbildningsanvändning: Perfekt för STEM-inlärningsprojekt och ingenjörskurser.
- Tävlingar: Idealisk för DIY drönare utmaningar och robottävlingar.
- Hobbyister: Engagerande projekt för teknikentusiaster och tillverkare.
- Avancerad utveckling: Stöder sekundär utveckling för anpassade applikationer.
Säkerhetsmeddelande:
Säkerställ säkra testförhållanden genom att använda det medföljande felsökningsstället. Undvik att flyga i trånga eller farliga områden. Följ monteringsanvisningarna och hantera lödda komponenter varsamt.
Med sin modulära design, öppen källkodsflexibilitet och omfattande lärresurser är STM32 DIY Open Source Quadcopter Kit din inkörsport till att bemästra drönarteknik och programmering.




Detta är en PCB-kortenhet för TV-system med STM3ZF103C8T6F-chip, designad för högkvalitativ videoöverföring och mottagning.


OnF STM32F Blue Pill, 7% i: STM32 High Frequency BRB+, 10 Ohm x 7 HhJfV: STM32 Fjärrkontroll. Skärm: 0,96 tum OLED IM Et: 2,4C IMHM: ~20°C till ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12cm x 6cm InLaR: 3,7V, 380mAh, Vikt: 60g
Related Collections