








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-axlig accelerometer, gyroskop, inklinometer, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-axlig accelerometer, gyroskop, inklinometer, ROS/Matlab
WitMotion
Det gick inte att ladda hämtningstillgänglighet
Översikt
WitMotion HWT601-AGV-485 är en 6-axlig attityd/huvudsensor designad för AGV-robotar, drönare och autonoma plattformar. Den kombinerar 3-axlig acceleration + 3-axlig vinkelhastighet och ger ut 3-axlig vinkel &och quaternion genom RS485 (Modbus) med upp till 200 Hz. Modulen har Kalman dynamisk filtrering, högprecisions kalibrering av svängbord, automatisk/manuell biasförvärvning, backup-ström för att spara huvudriktning vid strömavbrott, och ett IP67 vattentätt/dammtåligt hölje. Den stöder också fler-nivå kaskadering (upp till 32 enheter) för synkroniserad attitydmätning.
Nyckelfunktioner
-
Högprecisionsvinkel: XY noggrannhet 0.1°; Z noggrannhet 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Stabil gyroskopbias: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Bred ingång 9–36 V, driftström ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Provtagning: begäran–svar avläsning upp till 200 Hz.
-
Algoritm: Kalmanfilterfusion och dedikerad AGV-riktningsalgoritm.
-
Programvara: gratis PC-svit med live instrumentpaneler, kurvdiagram, 3D-visualisering (bil/kula/kvadrat/plan), konfiguration (bias, vinkelreferens, accelerationskalibrering, skalfaktorer), dataregistrering &och direkt sparande, och Matlab-import.
-
Utvecklarvänlig: exempelprogram och kodstöd för ROS, Linux, C/C#, Python.
-
Miljö: IP67, -40~80 °C (-40~85 °C tabellvariant visas).
-
Kaskad: upp till 32 sensorer på RS485 för samtidig attitydmätning.
Installationsriktlinjer
-
Montera sensorn på en fast, plan, stabil yta; ojämna baser orsakar vinkelavvikelse (se FIG.1–2).
-
Håll sensoraxeln parallell med den mätta axeln; undvik mellanaxelvinklar (se FIG.3–4).
-
Denna modell stöder endast horisontell installation.
Programvara &och visualisering
-
Powerful Data Dashboard (vinklar, hastighet, acceleration, magnetfält, kvaternion, portar, temperatur, spänning, etc.).
-
Konfigurationspanel: baudrate, enhetsadress, automatisk biasförvärv, Z-axel återställning, accelerationskalibrering, vinkelreferens, manuell positiv/negativ kalibrering och skalfaktorer.
-
3D-modeller för intuitiv rörelseövervakning och real-tidskurvor med dynamiska uppdateringar.
-
Rådata vy och filsparande för enkel insamling; Matlab analysimport stöds.
-
ROS IMU INS demo: attitydspårningsvisualisering och attityddata visning (yaw/roll/pitch, vinkelhastighet, linjär acceleration).
html
Specifikationer
Gränssnitt &och Prestanda
| Artikel | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Gränssnitt / Protokoll | RS485 / Modbus | RS485 / Modbus |
| Baudrate | 4,800–230,400 bps | 4,800–230,400 bps |
| Utdata | 3-axlig accelerering, vinkelhastighet, vinkel, kvaternion | Samma |
| Provtagningfrekvens | Upp till 200 Hz (begäran–svar) | Upp till 200 Hz |
| XY vinkel noggrannhet | 0.1° | 0. 1° |
| Vinkel noggrannhet (360° rotationsfel) | 0.1° | 0.15° |
| Accelerationsområde / upplösning | ±4 g / 0.0001 g/LSB | Samma |
| Gyroområde / upplösning | ±250 °/s / 0.0122 (°/s)/LSB | Samma |
| Vinkelområde / upplösning | XZ: ±180°; Y: ±90° / 0.0059° | Samma |
| Gyro bias instabilitet (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Temperaturkoefficient (XYZ) | 0.002°/°C | 0.002°/°C |
Elektrisk, Mekanisk &och Miljö
-
Matningsspänning: 9–36 V; Driftström: ≈ 8 mA (12 V)
-
Mått: 55 × 36.8 × 24 mm; Kabel längd: 1 m
-
Skydd: IP67
-
Driftstemperatur: -40~80 °C (tabellvariant visar också -40~85 °C)
-
Installation: Endast horisontell montering
-
Kaskad: Upp till 32 enheter på RS485
Tillämpningsområden
AGV/AMR och mobila robotar, drönare/UAV:er, obemannade logistikfordon och moduler för autonom körning.
Modellnamn &och urval
-
HWT601-AGV-485 – högre Z-axel noggrannhet (0.1°) och lägre Z-bias instabilitet (2°/h).
-
WT601-AGV-485 – standard Z-axelspecifikationer (0.15°, 5°/h).
Välj HWT601 när Z-riktningens precision är avgörande.
Detaljer

Högprecisions 6-axlig attitydsensor med 3-axlig acceleration, vinkelhastighet, vinkel och kvaternion. Funktioner AGV-riktning algoritm, IP67-skydd, Kalman-filtering, automatisk biasförvärv och PC-programvarustöd.
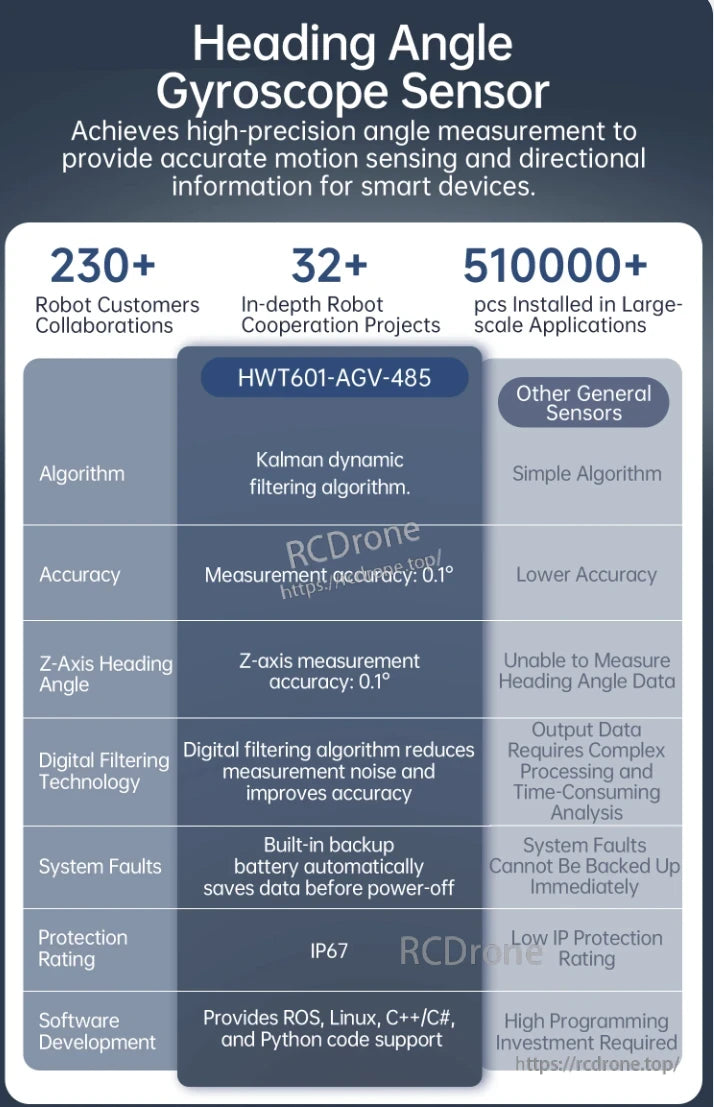
Riktvinkel Gyroskop Sensor HWT601-AGV-485 erbjuder högprecisions vinkelmätning med Kalman-filtering, 0.1° noggrannhet, digital brusreducering, IP67-skydd och stöder ROS, Linux, C++ och Python. Över 230 robot samarbeten och 510 000+ installationer.
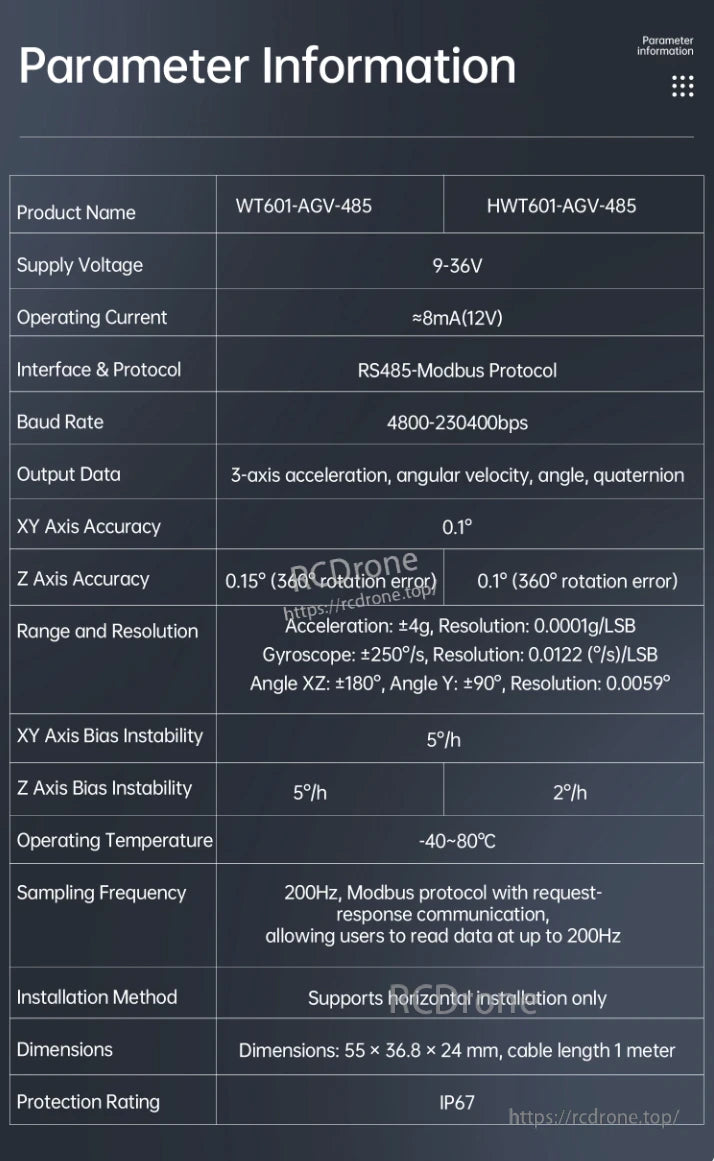
HWT601-AGV-485 IMU erbjuder 9-36V strömförsörjning, RS485-Modbus, 200Hz sampling, ±4g acceleration, ±250°/s gyroskop, IP67 klassning, -40~80°C drift. Ger noggranna, högupplösta 3-axliga data.
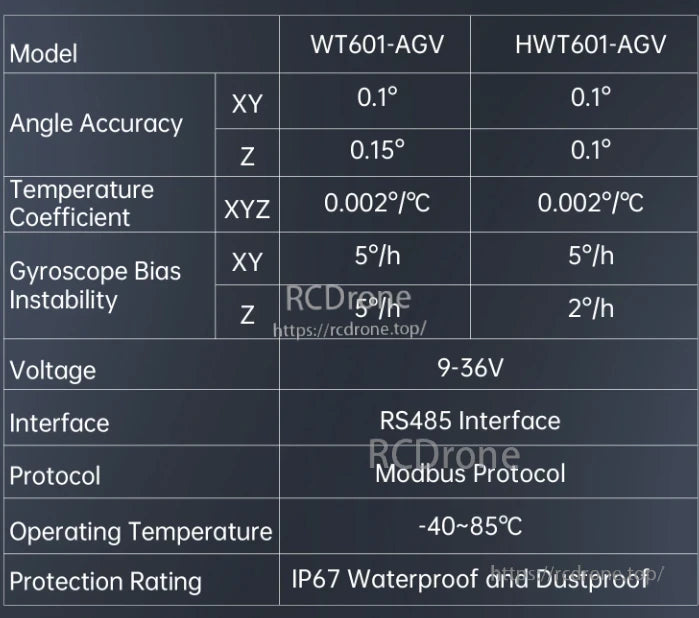
HWT601-AGV IMU erbjuder 0.1° vinkelnoggrannhet i XY- och Z-axlar med en temperaturkoefficient på 0.002°/°C över XYZ. Gyroskopets biasinstabilitet är 5°/h (XY) och 2°/h (Z). Den fungerar på 9–36V, använder RS485 med Modbus och fungerar från -40 till 85°C. IP67 klassad, den erbjuder vattentät och dammtät skydd. WT601-AGV-varianten har liknande specifikationer men 0.15° Z-axel noggrannhet och 5°/h Z-axel biasinstabilitet. Båda modellerna säkerställer pålitlig prestanda i krävande miljöer.
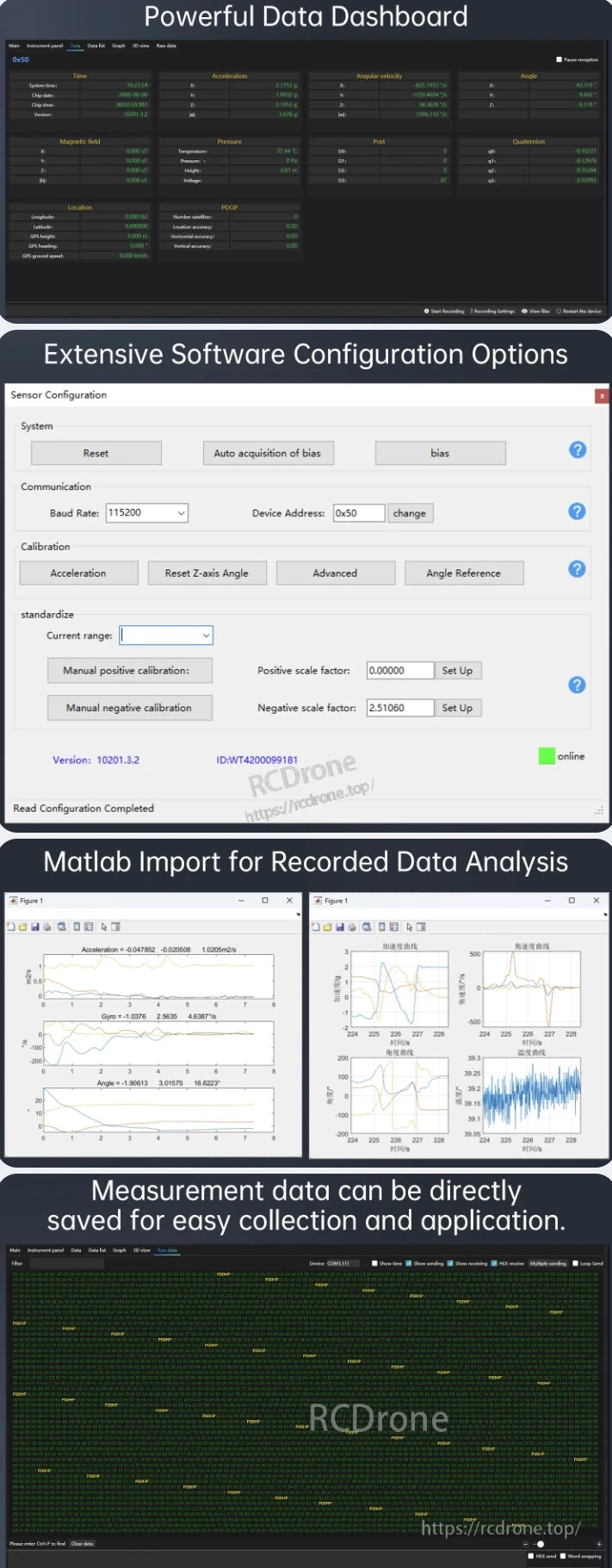
Kraftfull datainstrumentpanel med realtidsavläsningar från sensorer, omfattande programvarukonfiguration, MATLAB-import för analys och direkt datalagring för enkel insamling och tillämpning.
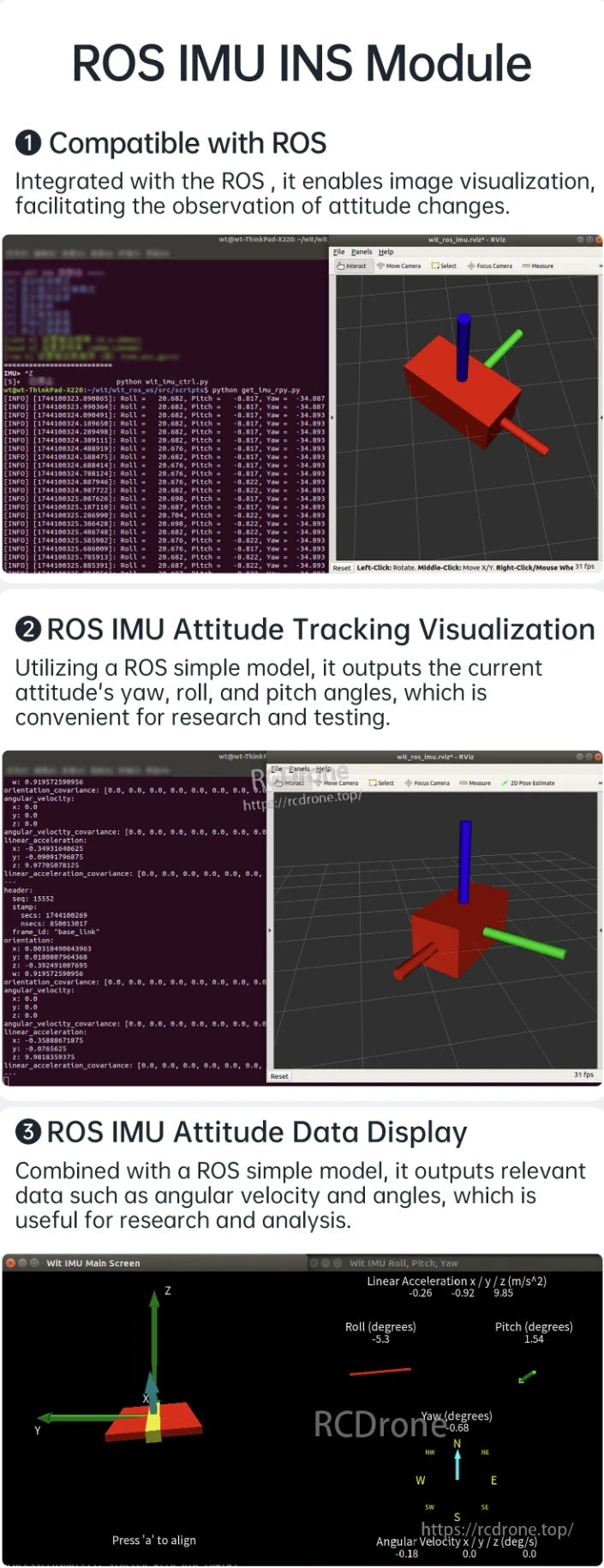
ROS IMU INS-modul erbjuder ROS-kompatibilitet, visualiserar attitydspårning och visar realtidsrullning, lutning, svängning, vinkelhastighet och linjär acceleration för forskning och analys.
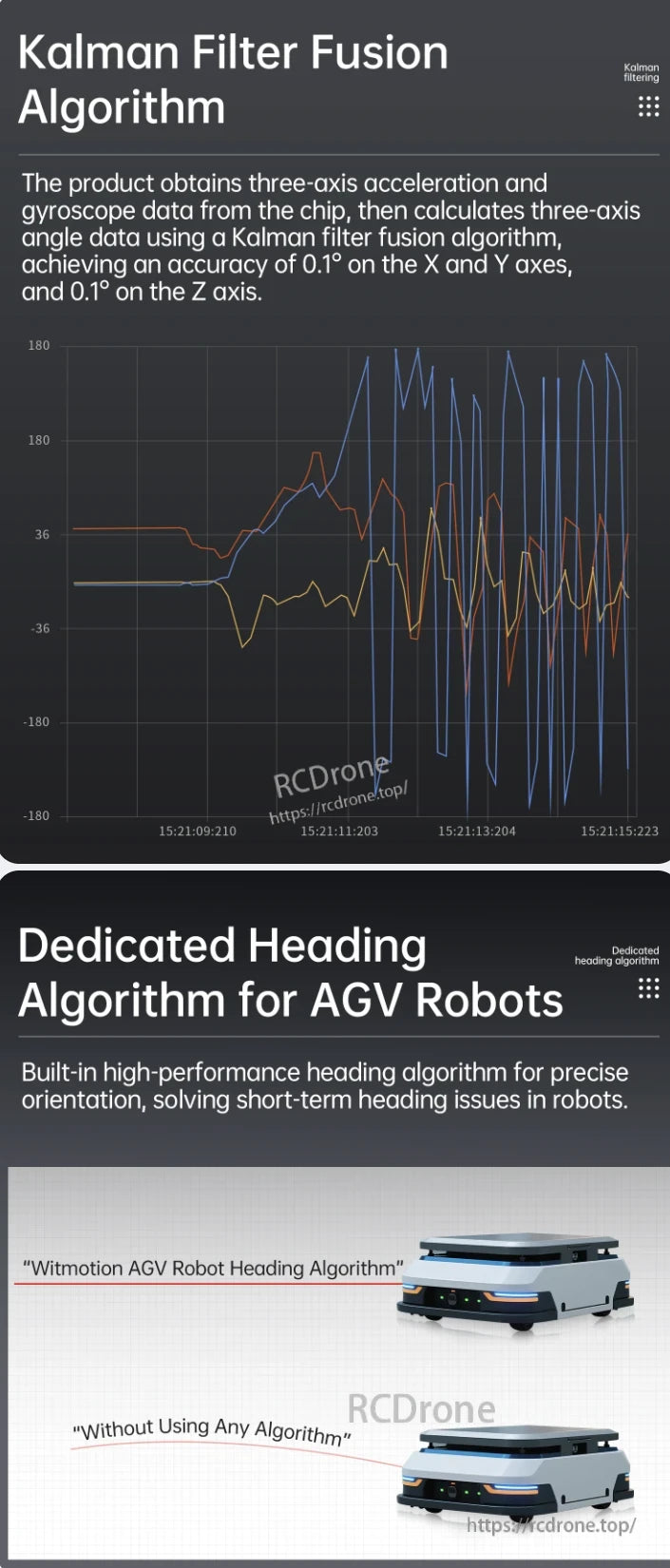
WitMotion HWT601 AGV IMU levererar precis 3-axlig vinkeldata med 0,1° noggrannhet med hjälp av Kalman-filterfusion. Dess dedikerade heading-algoritm säkerställer stabil robotorientering, vilket avsevärt förbättrar prestanda jämfört med system utan sådana algoritmer.
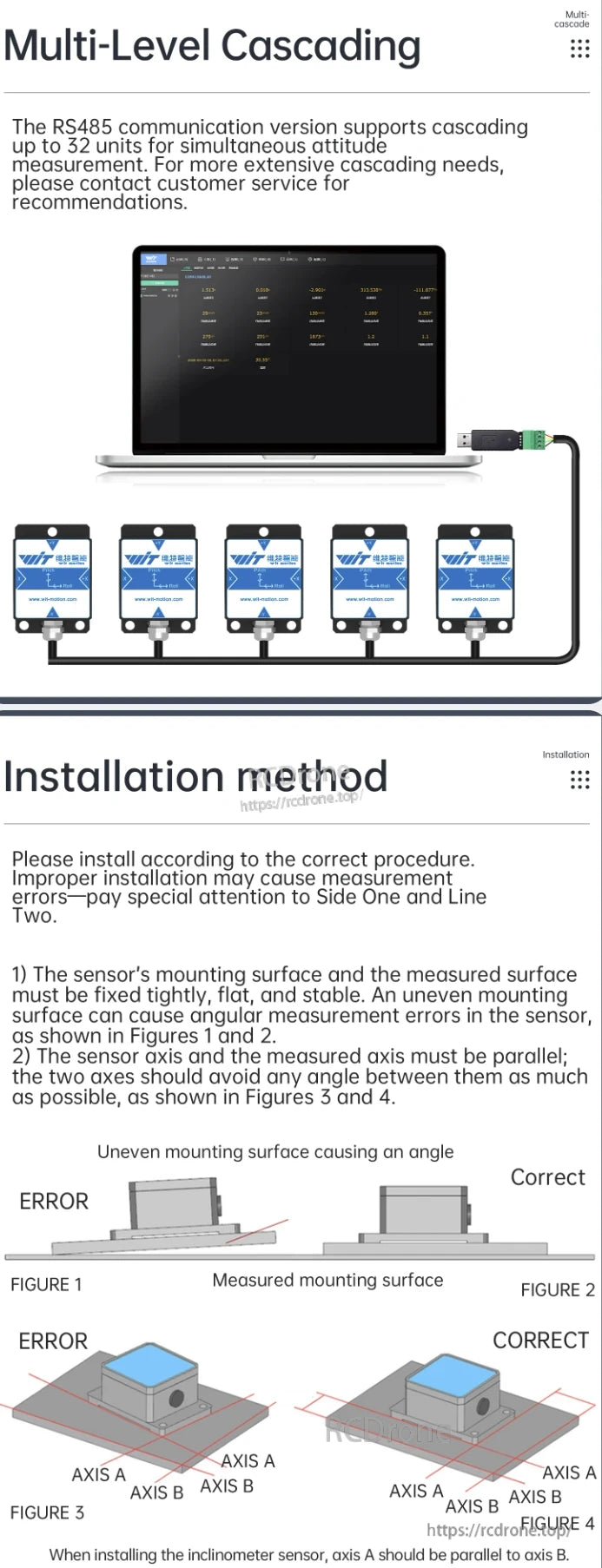
WitMotion HWT601 AGV IMU stöder upp till 32 kaskad-enheter via RS485 för att mäta attityd. Säkerställ platt, stabil montering och justerade axlar för noggrannhet.
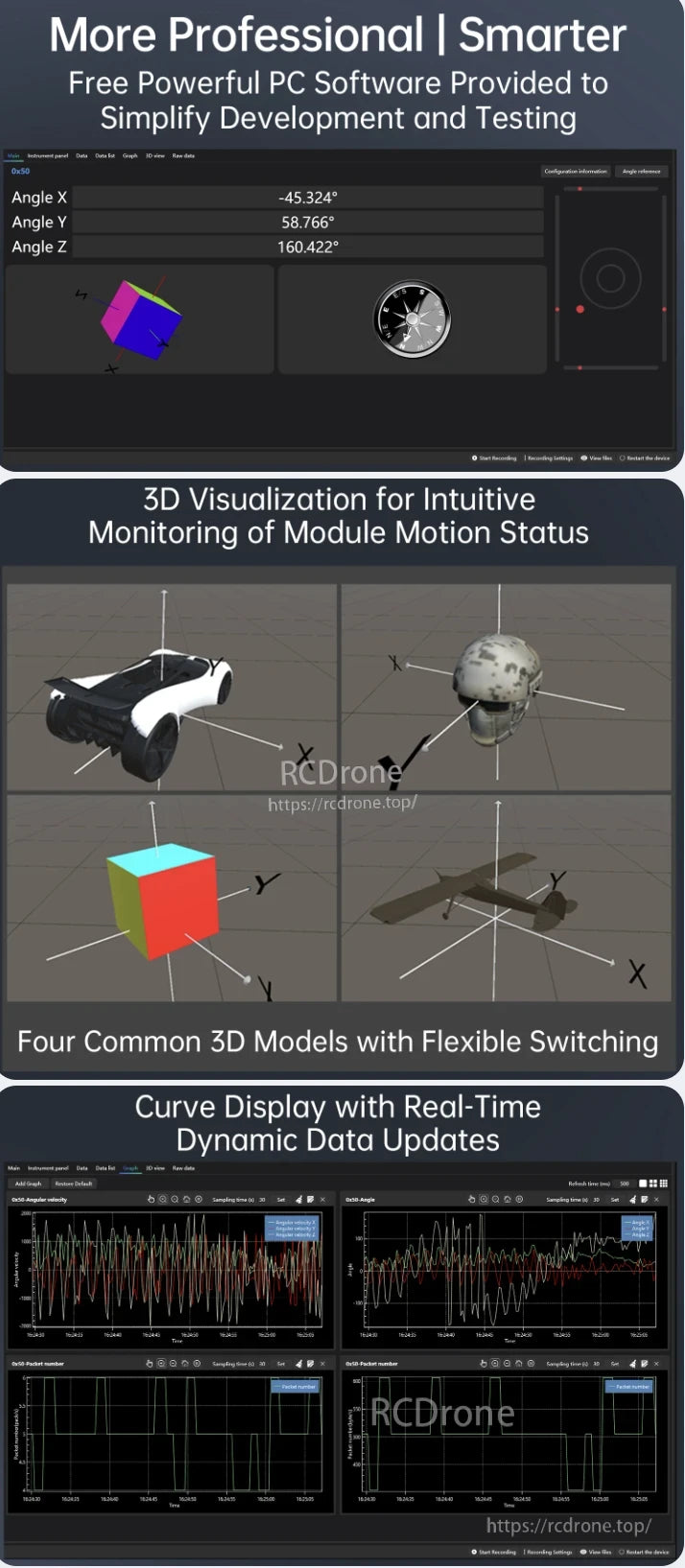
Professionell PC-programvara för WitMotion HWT601 AGV IMU erbjuder realtids 3D-visualisering, vinkelövervakning och dynamisk kurvvisning.Funktioner inkluderar intuitiv rörelsespårning, flexibel modellväxling och live datauppdateringar för effektiv utveckling och testning.
Stöddokumentation inkluderar exempelprogram för STM32, Arduino, 51 UART, Windows C++ och Matlab för att hjälpa utvecklare att tillämpa produkten med hjälp av handledningar och kodexempel.
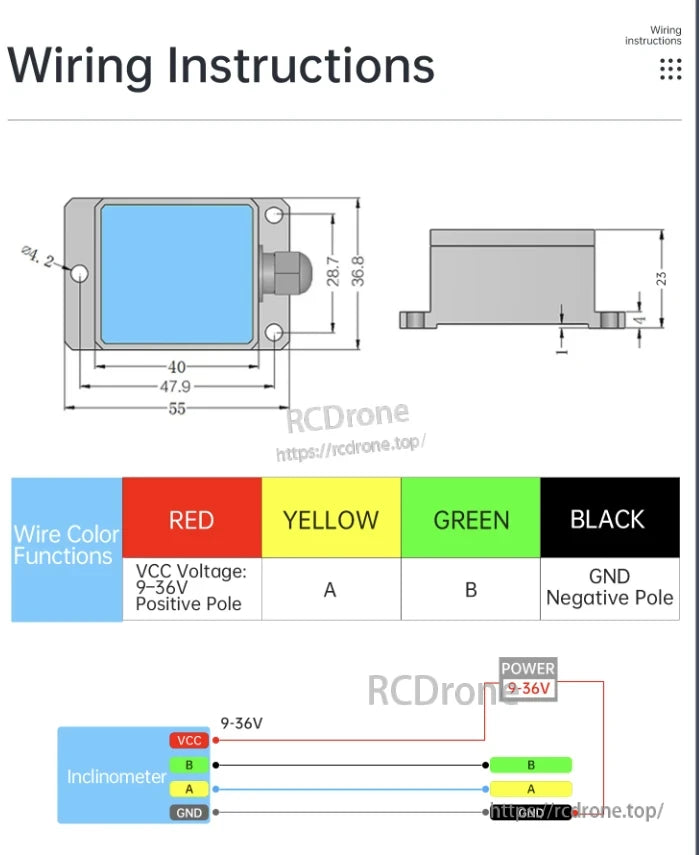
WitMotion HWT601 AGV IMU kopplingsguide: röd (9-36V), gul (A), grön (B), svart (GND). Dimensioner och anslutningsschema tillhandahålls.

WitMotion HWT601 AGV IMU för drönare, autonom körning, mobila robotar och obemannade logistikfordon.
Related Collections








