












WitMotion WT901C-485 9-axlig IMU-accelerometer, gyroskop, digital kompass (RS485/RS232/TTL), 0,05° vinkelprecision, 0,2–200 Hz AHRS
WitMotion WT901C-485 9-axlig IMU-accelerometer, gyroskop, digital kompass (RS485/RS232/TTL), 0,05° vinkelprecision, 0,2–200 Hz AHRS
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
WitMotion WT901C-485 är en kompakt 9-axlig AHRS IMU baserad på en triaxial MPU9250-klass sensorsvit (accelerometer + gyroskop + magnetometer) och WitMotions fusion/Kalman-algoritm. Den levererar vinkel, acceleration, vinkelhastighet, magnetfält och kvaternion utdata med XY statisk noggrannhet 0.05° (dynamisk 0.1°) och 0.2–200 Hz justerbar uppdateringsfrekvens. Flera fysiska gränssnitt (RS485/RS232 Modbus & TTL UART) och breda ingångsområden gör WT901C-485 lätt att integrera med Arduino/STM32/MCUs, datorer och industriella kontroller. Officiell Windows-programvara (MiniIMU.exe) erbjuder realtidsdiagram, 3D-demo, datalogging/export och visuell magnetkalibrering.
Nyckelfunktioner
-
9-axliga utdata: vinkel (Roll/Pitch/Yaw), 3-axlig acc/gyro/mag, kvaternion.
-
Hög stabilitet &och noggrannhet: XY 0.05° statisk, 0.1° dynamisk; accelerationsstabilitet 0.01 g.
-
Flexibel I/O: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (standard 9,600).
-
Justerbar frekvens: 0.2–200 Hz (standard 10 Hz).
-
Bred strömförsörjning: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA typisk.
-
Verktyg &och SDK:er: Windows-app, Android-app, CH340/CP2102-drivrutiner, exempel på kod för C/C++/STM32/Arduino/Matlab.
-
Magnetisk kalibrering &och 3D-demo för första installation; live-diagram och TXT-export.
-
Industriell design: –40~85 °C, 51×36×15 mm, vertikal eller horisontell montering.
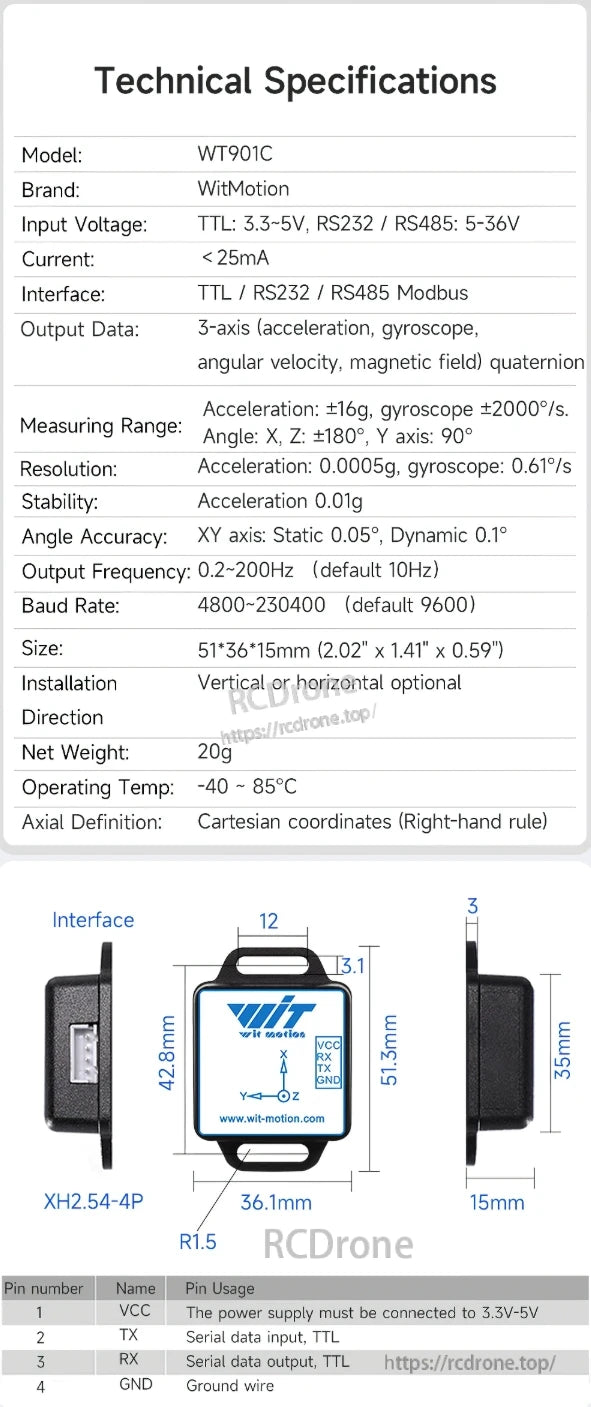
Tekniska specifikationer
| Artikel | Spec |
|---|---|
| Modell | WT901C (WT901C-485 variant) |
| Gränssnitt | TTL / RS232 / RS485 (Modbus) |
| Ingångsspänning | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Ström | < 25 mA |
| Utdata | Acceleration, vinkelhastighet, magnetfält, vinkel, kvaternion |
| Mätningsområden | Acc ±16 g, Gyro ±2000 °/s; Vinkel: X,Z ±180°, Y 90° |
| Upplösning | Acc 0.0005 g, Gyro 0.61 °/s |
| Stabilitet | Acceleration 0.01 g |
| Vinkel noggrannhet | XY statisk 0.05°, dynamisk 0.1° |
| Utgångsfrekvens | 0.2–200 Hz (standard 10 Hz) |
| Baudrate | 4,800–230,400 (standard 9,600) |
| Storlek / vikt | 51×36×15 mm, 20 g |
| Drifttemperatur | –40 ~ 85 °C |
| Axlar | Kartesisk, högerhandsregel |
| Installation | Vertikal eller horisontell |
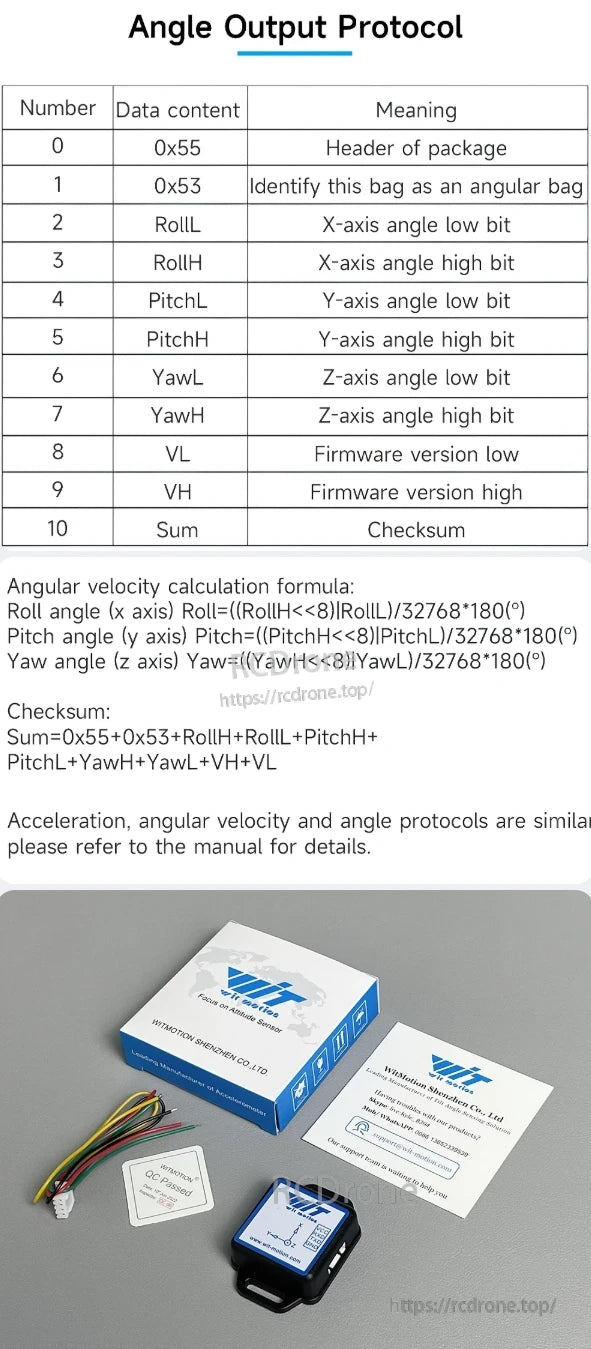
Vinkelram (0x55 0x53) – utdata-protokoll
| Byte-index | Innehåll | Betydelse |
|---|---|---|
| 0 | 0x55 | Paketheader |
| 1 | 0x53 | “Vinkel” ram-ID |
| 2–3 | RollL/RollH | X-axelvinkel (låg/hög) |
| 4–5 | PitchL/PitchH | Y-axelvinkel (låg/hög) |
| 6–7 | YawL/YawH | Z-axelvinkel (låg/hög) |
| 8 | VL | Firmwareversion låg |
| 9 | VH | Firmwareversion hög |
| 10 | Summa | Kontrollsumma |
Vinkelavkodning
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Kontrollsumma
Summa = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Acceleration och vinkelhastighetsramar följer samma layoutstil—se manual.)
Dimensioner &och kontakt
Inneslutningsstorlek: 51 × 36 × 15 mm (H × B × D), med monteringsöron; vikt ≈ 20 g.
Kontakt: XH2.54-4P (kortkontakt på sensorn).
Pinout (TTL-version)
| Pin | Namn | Beskrivning |
|---|---|---|
| 1 | VCC | Strömförsörjning 3.3–5 V |
| 2 | TX | Seriell datainmatning, TTL-nivå |
| 3 | RX | Seriell datautgång, TTL-nivå |
| 4 | GND | Mark |
Noter: Använd TTL-nivåer för direkt MCU-integration. RS232/RS485-varianter använder sina respektive spänningsnivåer och kablingsstandarder.
Programvara &och verktyg
-
MiniIMU.exe (Windows): konfiguration (algoritm, installationsriktning, intervall, bandbredd), realtidsdiagram, rå/hex vy, datainspelning och TXT-export.
-
3D-demo: visualisera orientering i realtid (källa tillgänglig).
-
Visuell magnetisk kalibrering: ellipsanpassningsguide för att ta bort bias (rekommenderas för första användning).
-
Drivrutiner &och kod: CH340/CP2102 drivrutiner; exempel för STM32, Arduino, C/C++, Matlab; Android-app; PC/telefon demonstrationsvideor.
Typiska tillämpningar
Automation och robotik, nivåplattformar, lutningsvinkelövervakning, vibrationsövervakning, konsumentelektronik, IoT-systemintegration, industriell testning, VR/AR-headset.
Detaljer

Kostnadseffektiv AHRS IMU med 0,05° noggrannhet i X Y-axlar. Funktioner inkluderar lutning, vibration, attitydavkänning med hjälp av WitMotion Fusion-algoritmen. Inkluderar acceleration, gyroskop, vinkel, magnetisk, Kalman-filtering och quaternionfunktioner.
WitMotion WT901C IMU-sensorn erbjuder 3-axlig acceleration, gyroskop, vinkelhastighet och magnetfältssensor. Den stöder TTL/RS232/RS485-gränssnitt, har ett ±16g accelerationsområde, ±2000°/s gyroskop, 0.05° statisk vinkelnoggrannhet och fungerar mellan -40°C och 85°C.

WitMotion WT901C IMU-sensor erbjuder automatisering, VR-headset, nivåmätning och vibrationsövervakning. Tillämpningar inkluderar konsumentelektronik, IoT-integration, industriell testning och AR/VR. Gratis programvara erbjuder användarvänlig attitydmätning med realtidsvinkeldatan.
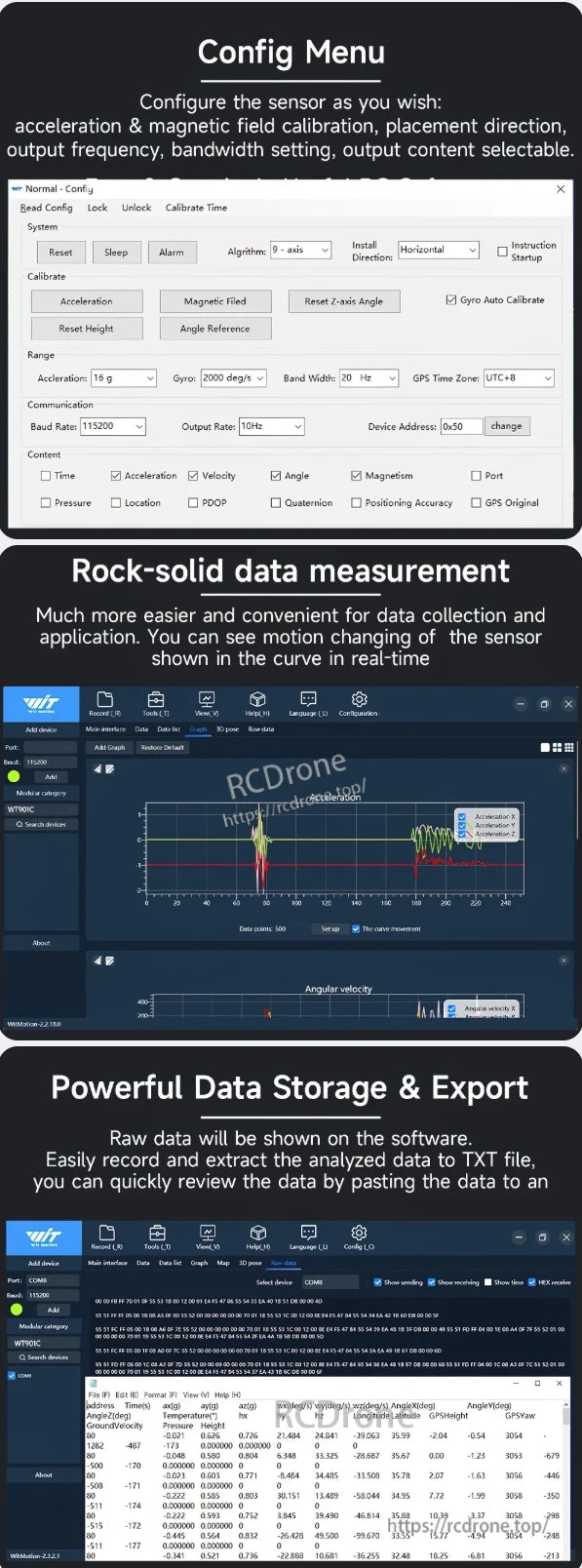
WitMotion WT901C IMU-sensorn erbjuder konfigurerbara inställningar för acceleration, magnetfält och orientering. Den tillhandahåller realtidsdatavisualisering, robust mätning och stöder datalagring/export i TXT-format för analys.
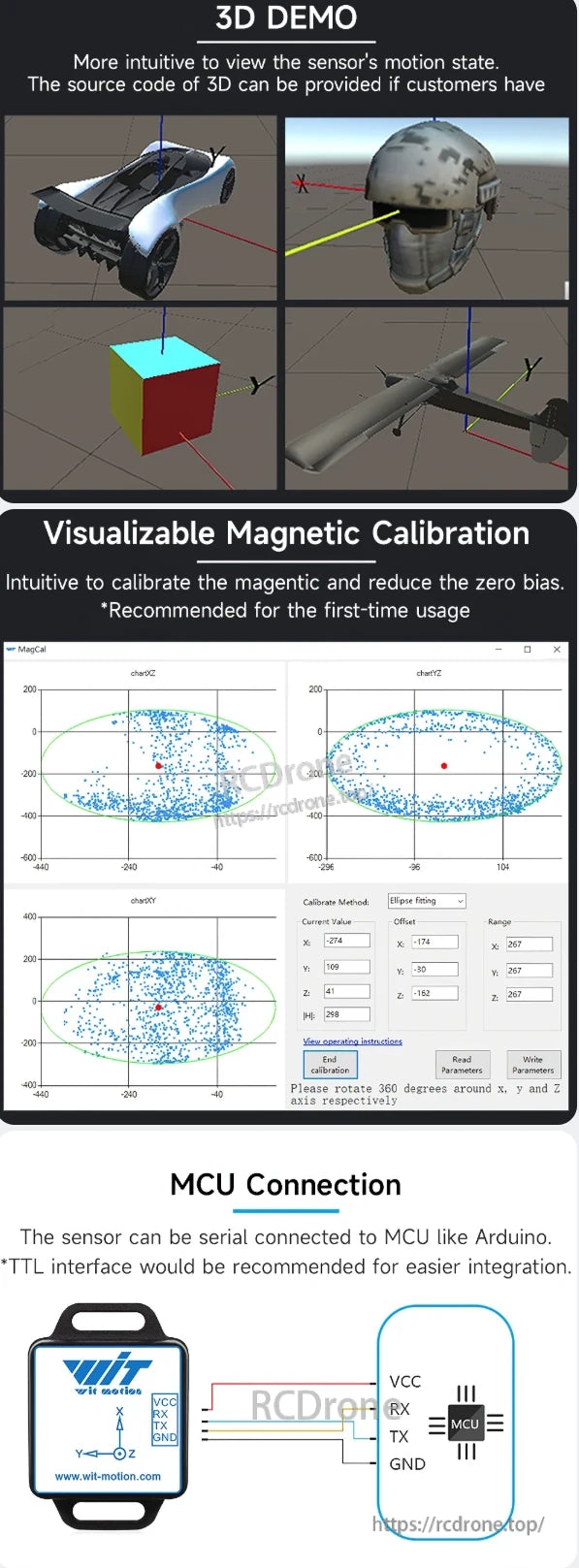
3D-demo visualiserar sensorrörelse med bil-, hjälm-, kub- och drönarmodeller. Magnetisk kalibreringsgränssnitt möjliggör intuitiv justering. MCU-anslutningsdetaljer har TTL-gränssnitt för Arduino, med märkta VCC, RX, TX, GND-stift.

Utvecklingssatser inkluderar gratis Windows-programvara, drivrutiner, manualer och exempel på kod för STM32, Arduino, C++, MATLAB. Innehåller PDF-filer, demovideor och Android-appsupport för WT901C IMU-sensor.
IMU-sensor WT901C vinkelutgångsprotokolldetaljer: databasstruktur, vinkelformler, kontrollsummaformel, paketering. Innehåller roll-, pitch- och yaw-vinklar, firmwareversion och kontrollsumma.
Related Collections












