









WitMotion WT901C 9-axlig AHRS IMU — Accelerometer, Gyroskop, Magnetometer med vinkel & Kvaternion, 0,05° noggrannhet, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-axlig AHRS IMU — Accelerometer, Gyroskop, Magnetometer med vinkel & Kvaternion, 0,05° noggrannhet, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Det gick inte att ladda hämtningstillgänglighet
Översikt
WitMotion WT901C är en kompakt 9-axlig AHRS IMU som fusionerar en 3-axlig accelerometer, 3-axlig gyroskop och 3-axlig magnetometer med WitMotions fusion/Kalman-filter för att ge ut vinklar (roll/pitch/yaw), vinkelhastighet, acceleration, magnetfält och kvaternion. Den levererar 0.05° statisk XY noggrannhet (0.1° dynamisk), stöder 0.2–200 Hz uppdateringsfrekvenser och kommunicerar över TTL, RS232 eller RS485 (Modbus)—ideal för lutning, vibration och attitydmätning inom automation, nivellering av plattformar, VR/AR och industriell testning.
Nyckelfunktioner
-
Hög noggrannhet AHRS: XY statisk 0.05°, dynamisk 0.1°; högra handens kartesiska axlar.
-
Bred I/O & spänning: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (standard 9 600).
-
Konfigurerbar utgång: 0.2–200 Hz (standard 10 Hz); användarvalda innehåll.
-
Full 9-axlad data: Acceleration, vinkelhastighet, magnetfält, vinkel & kvaternion.
-
Visualiseringsverktyg: Windows MiniIMU-programvara med realtidsdiagram, rådata-loggning/export (TXT), 3D rörelsedemo, och visuell magnetkalibrering.
-
Utvecklarresurser: Drivrutiner (CH340/CP2102), manualer/datablad, exempel på kod för 51/C++/STM32/Arduino/Matlab, och Android-app.
-
Flexibel installation: Vertikal eller horisontell montering; kompakt 51 × 36 × 15 mm, ~20 g.
html
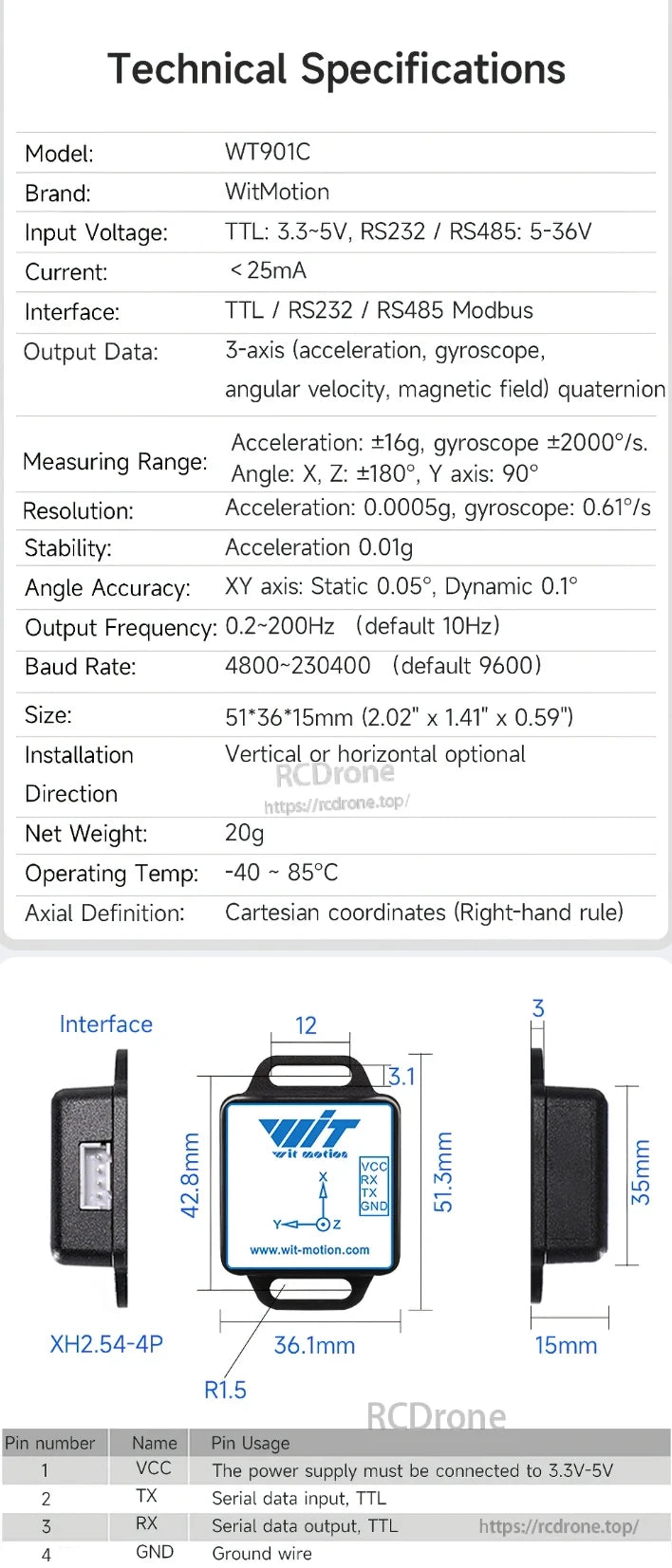
Tekniska specifikationer
-
Modell/Varumärke: WT901C / WitMotion
-
Gränssnitt: TTL / RS232 / RS485 (Modbus)
-
Ingångsspänning: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Ström: < 25 mA
-
Utdata: 3-axlig accelerometer, gyroskop (vinkelhastighet), magnetfält, vinkel, kvaternion
-
Mätningsområde: Acc ±16 g; Gyro ±2000 °/s; Vinkel X,Z ±180°, Y 90°
-
Upplösning: Acc 0.0005 g; Gyro 0.61 °/s
-
Stabilitet: Acc 0. 01 g
-
Vinkel noggrannhet: XY statisk 0.05°, dynamisk 0.1°
-
Utgångsfrekvens: 0.2–200 Hz (standard 10 Hz)
-
Baud rate: 4 800–230 400 (standard 9 600)
-
Storlek / Vikt: 51 × 36 × 15 mm / ≈ 20 g
-
Drifttemperatur: −40 ~ 85 °C
-
Axeldefinition: Kartesiska koordinater, högerhandsregel
Dimensioner &och kontakt (TTL-version)
-
Kropp: 51.3 mm (H) × 36.1 mm (B) × 15 mm (D); monteringsöron radie R1.5
-
Kontakt: XH2.54-4P
-
Pinout (vänster→höger på etikett VCC/RX/TX/GND):
-
VCC — ström 3.3–5 V
-
TX — Seriell datainmatning, TTL
-
RX — Seriell datautgång, TTL
-
GND — jord
-
Obs: Axeldiagrammet är tryckt på höljet (X↑, Y→, Z•), vilket underlättar justeringen.
Vinkelutgångsprotokoll (ram 0x55 0x53)
| Byte | Innehåll | Betydelse |
|---|---|---|
| 0 | 0x55 | Header |
| 1 | 0x53 | Vinkelram ID |
| 2–3 | RollL/RollH | X-axelvinkel |
| 4–5 | PitchL/PitchH | Y-axelvinkel |
| 6–7 | YawL/YawH | Z-axelvinkel |
| 8–9 | VL/VH | Firmwareversion (låg/hög) |
| 10 | Summa | Kontrollsumma |
Vinkelkonvertering:Rullning = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Gyration = ((YawH<<8)|YawL)/32768*180°
(Acceleration och vinkelfart ramar är liknande; se manual.)
Programvara &och verktyg
-
Windows (MiniIMU.exe): enhetskonfiguration (intervall, bandbredd, utgångsfrekvens), realtidsdiagram, rådata vy, 3D läge visualisering, exportera till TXT.
-
Magnetkalibrering: visuell ellipsanpassningsarbetsflöde för att minska bias (rotera runt X/Y/Z).
-
MCU-integration: direkt seriell anslutning; TTL rekommenderas för enkel MCU-anslutning (Arduino/STM32, etc.).
-
Inkluderade resurser: Datasheet.pdf, Manual.pdf, CH340 &och CP2102 drivrutiner, exempel kod, Android App, demovideor.
Typiska tillämpningar
Automation | Lutnings-/nivåövervakning | Vibrationövervakning | Nivelleringsplattformar | IoT-systemintegration | Industriell testning | VR/AR-headset | Konsumentelektronik.
Detaljer

Kostnadseffektiv AHRS IMU med 0,05° noggrannhet i X- och Y-axlar. Funktioner för lutning, vibration och attitydövervakning med hjälp av WitMotion Fusion Algorithm. Inkluderar accelerometer, gyroskop, vinkel, magnetisk, Kalman-filtering och quaternion-funktioner.
WitMotion WT901C IMU erbjuder 3-axlig mätning med accelerometer, gyroskop och magnetometer. Ger quaternion-utgång. Stöder TTL, RS232, RS485. Mäter ±16g, ±2000°/s, ±180° vinklar. Kompakt storlek 51×36×15mm. Fungerar från -40 till 85°C.

WitMotion WT901C IMU stöder automation, VR-headset, nivåmätning och vibrationsövervakning. Den fungerar för konsumentelektronik, IoT, industriell testning och AR/VR. Levereras med gratis programvara för visning av realtidsvinkeldatat.

WitMotion WT901C IMU-konfigurationsmenyn möjliggör sensorjustering, inställningar för datautmatning och realtidsrörelsevisualisering. Den stöder 9-axlig algoritm, justerbar acceleration, gyro, bandbredd, GPS-tidszon. Realtidsdiagram visar acceleration och vinkelhastighet för noggrann mätning.
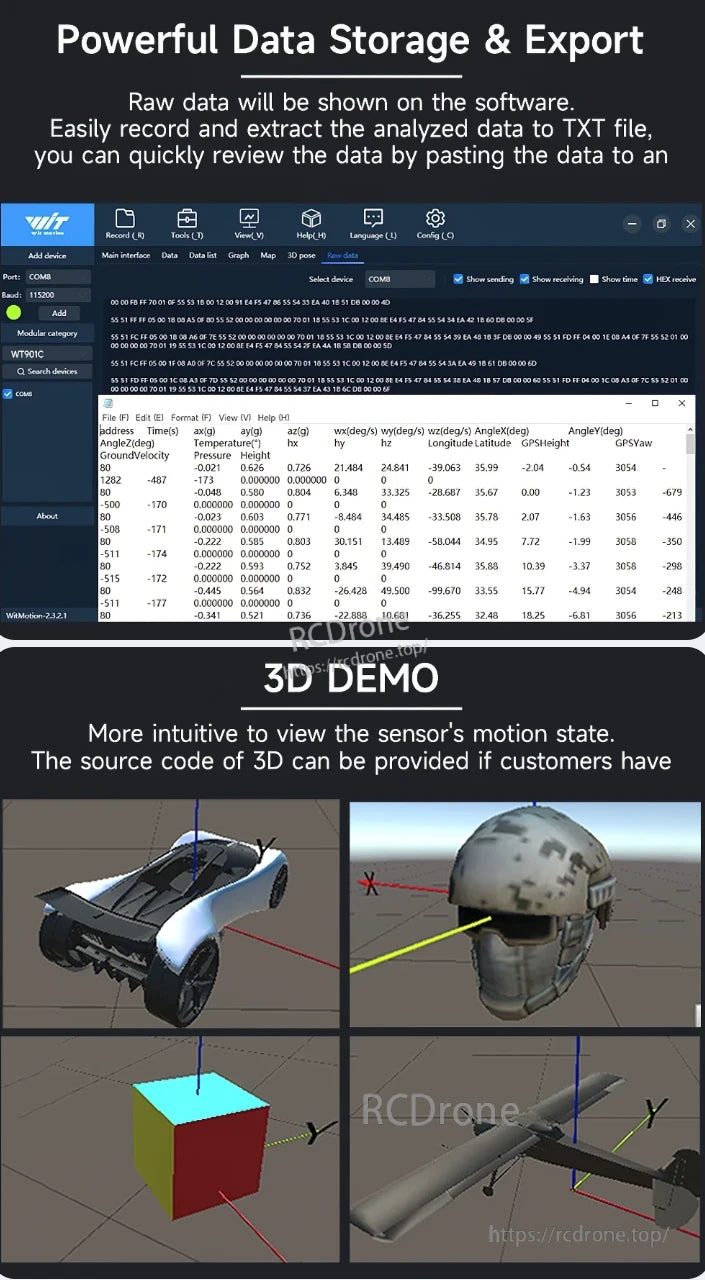
WitMotion WT901C IMU erbjuder kraftfull datalagring, enkel TXT-export och 3D-rörelsevisualisering med tillgänglig källkod.
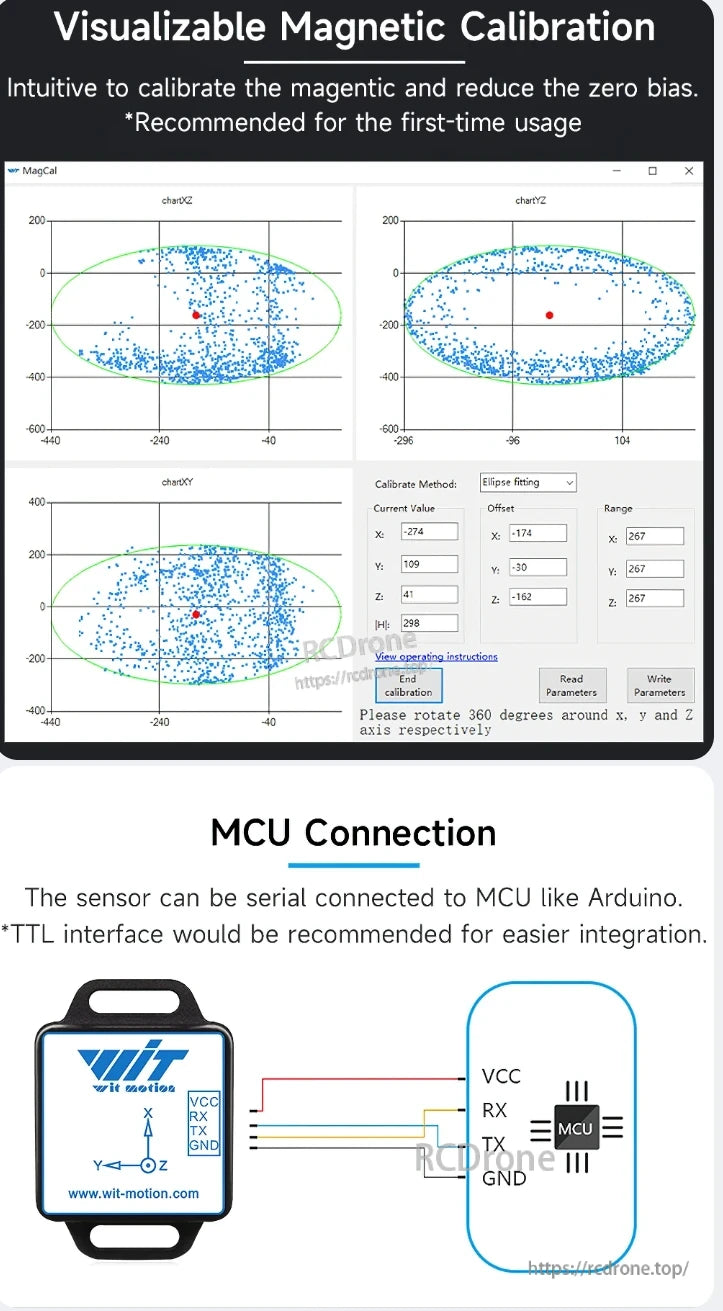
Visualiserbar magnetisk kalibrering för WT901C IMU med ellipsanpassningsmetod. MCU-anslutning via TTL-gränssnitt rekommenderas. Sensorn ansluts till Arduino-liknande MCU:er med VCC, RX, TX, GND-stift.
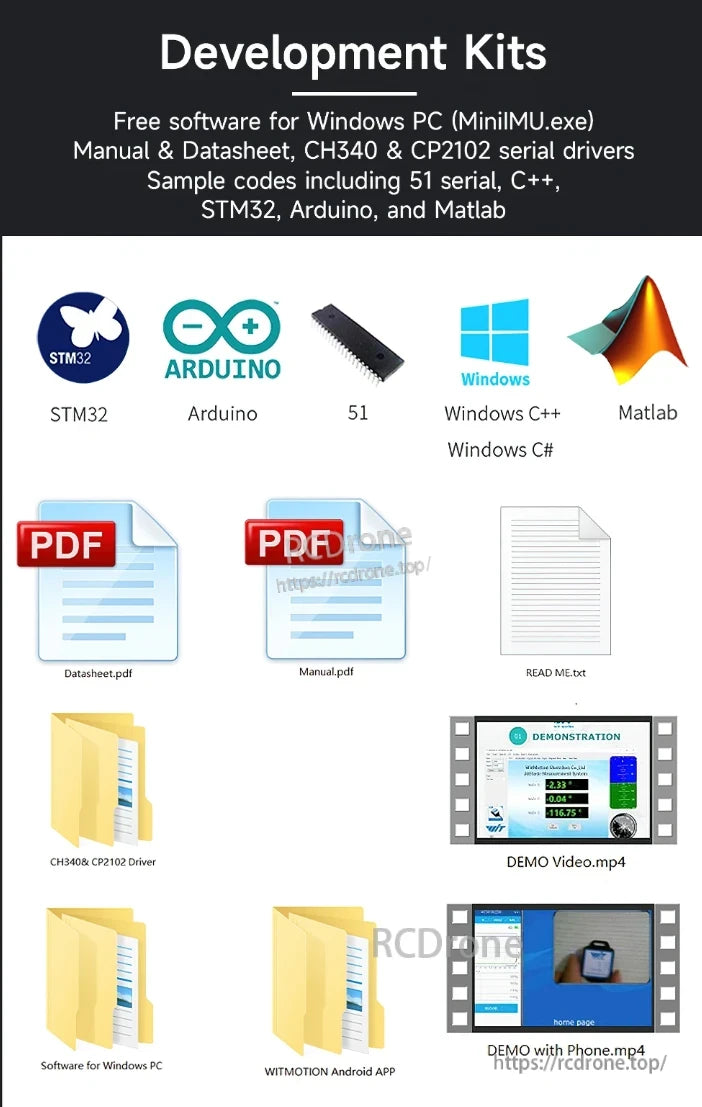
Utvecklingssatser inkluderar gratis programvara för Windows, manual, datablad, CH340 & CP2102-drivrutiner, exempel på kod för 51, C++, STM32, Arduino och Matlab, tillsammans med demovideor och Android-app.
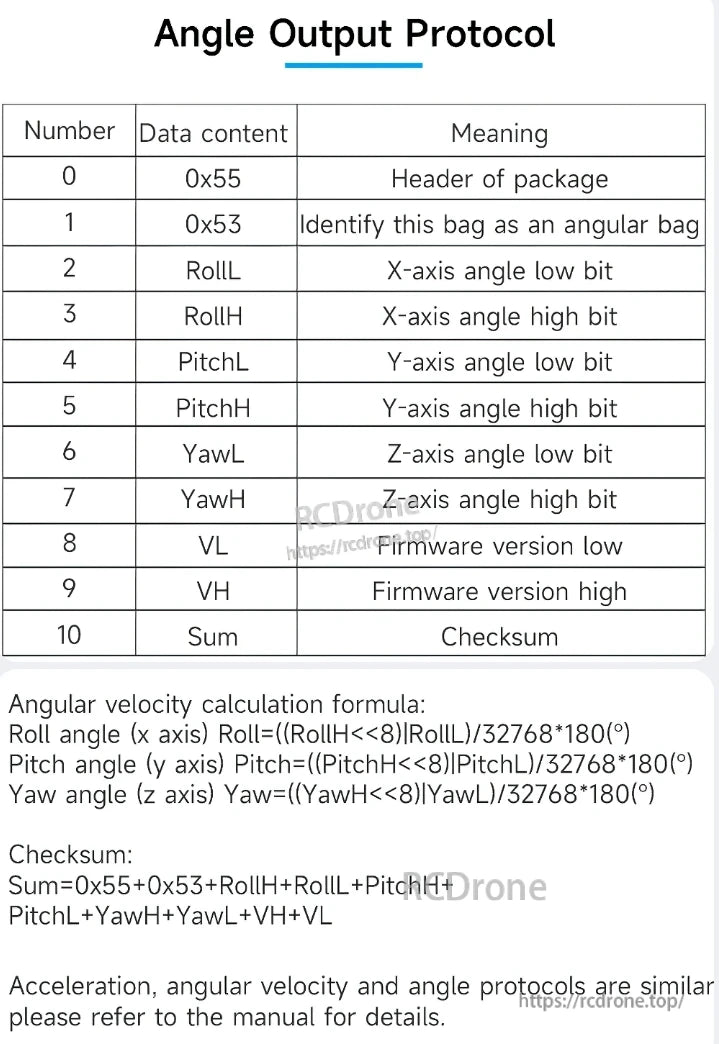
Datastrukturen för WT901C IMU vinkelutgång inkluderar rubrik, roll, pitch, yaw, firmwareversion och kontrollsumma. Formler för beräkningar och verifiering tillhandahålls. Liknande strukturer finns för acceleration och vinkelhastighet.
Related Collections









