






WitMotion WTGAHRS1/2 10-axlig GPS-IMU Accelerometer Gyroskop Magnetometer Barometer AHRS, 0,2–200 Hz, UART/I²C, BDS+GPS Navigering
WitMotion WTGAHRS1/2 10-axlig GPS-IMU Accelerometer Gyroskop Magnetometer Barometer AHRS, 0,2–200 Hz, UART/I²C, BDS+GPS Navigering
WitMotion
Det gick inte att ladda hämtningstillgänglighet
Översikt
WTGAHRS1/2 är GNSS-stödda AHRS/IMU-moduler som förenar en 3-axlig accelerometer, 3-axlig gyroskop, 3-axlig magnetometer, 3-axlig Euler-vinkel och en barometer med BDS/GPS-positionering. De levererar stabil attityd, riktning, longitud/latitud, höjd och markhastighet vid 0,2–200 Hz med hjälp av Kalman-filter. Kärnprecision är X/Y 0,2° och Z 1° (efter kalibrering, bort från magnetisk störning). De erbjuder UART-TTL och I²C (400 kHz) utgångar, gratis Windows övervakningsprogramvara och rika exempel för STM32/Arduino/Windows/Matlab—ideal för UAV:er, UGV:er, robotik och fordonsnavigering.
Modellval
| Modell | Antenna | Försörjning | Ström | Utgångsfrekvens | Vinkelprecision |
|---|---|---|---|---|---|
| WTGAHRS1 | Extern GNSS (BDS+GPS) | 3,3–5 V | < 50 mA | 0,2–200 Hz | X/Y 0.2°; Z 1° |
| WTGAHRS2 | Intern GNSS (BDS+GPS) | 3.3–5 V | < 40 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
IMU & mekaniska specifikationer (WTGAHRS1/2)
-
Storlek: 72.5 mm × 38 mm × 27 mm
-
Sensorer: 3-axlig Acc; 3-axlig Gyro; 3-axlig Mag; 3-axlig Vinkel; Barometer
-
Områden: Acc ±16 g; Gyro ±2000 °/s; Vinkel ±180°
-
Barometer noggrannhet: 1 Pa
-
Typisk mätfel: 1°
-
Gränssnitt: UART-TTL (baud 4,800–921,600), I²C (stöder 400 kHz)
-
Utdatainnehåll: tid, acceleration, vinkelhastighet, Euler-vinkel, magnetfält, tryck, höjd, longitud, latitud, markhastighet
-
Vikt: WTGAHRS1 70.6 g; WTGAHRS2 62.4 g
GNSS-specifikationer
-
System/Band: BDS/GPS/GLONASS/GALILEO/QZSS/SBAS; C/A-kod 1.023 MHz
-
RF: tre mottagningskanaler; S11/S22 SWR ≤ 1.3; 50 Ω ± 5%
-
Horisonell noggrannhet: < 2.5 m (autonom), < 2 m (SBAS) [CEP50%, 24 h statisk, −130 dBm, ~6 användbara satelliter]
-
Hastighetsnoggrannhet: < 0.1 m/s; Kursnoggrannhet: < 0.5°; Tidtagning: 30 ns; Referens: WGS-84
-
Dynamik: höjd 50,000 m; hastighet 50,000 m/s; acceleration ≤ 4 g
-
Känslighet: spårning −162 dBm; förvärv −148 dBm
-
Starttider: kall 35 s; varm 32 s; het 1 s
-
1PPS: 0.25 Hz–1 kHz; Positionsuppdatering: 1–10 Hz (standard 1 Hz)
-
Gränssnitt: UART/TTL
Programvara och utveckling
-
Windows övervakningsprogramvara: datalogging, 3D-modell, kurvritning, instrumentpanel, modulkonfiguration
-
Exempel på kod/resurser: STM32 UART-demo, Arduino-bibliotek, 8051-demo, Windows C/C# och Matlab-exempel, Android APP
-
Snabbtestkoppling (USB-TTL): GND–GND, VCC–5 V, TX–RX, RX–TX
Typiska tillämpningar
UAV/UGV AHRS, robotik och AGV/AMR-navigering, fordonspositionering och hastighets-/attitydmätning, antenn-/solspårare, plattformsstabilisering, utbildning och algoritmforskning.
Vad ingår
-
WTGAHRS1 eller WTGAHRS2 sensor (enligt val)
-
GNSS-antenn (WTGAHRS1 extern antennversion)
-
Användarguide och nedladdningslänkar för PC-programvara och exempel
Köparnoteringar
-
Z-axel/riktningens noggrannhet beror på kalibrering och magnetisk miljö.
-
Välj WTGAHRS1 när du behöver en extern GNSS-antenn; välj WTGAHRS2 för en kompakt konstruktion med en intern antenn.
Detaljer

WitMotion WTGAHRS1 AHRS+GPS-modul inkluderar 3-axlig accelerometer, gyroskop, magnetometer, barometer och GPS. Ger högprecisionsdata för attityd, riktning och position för robotik och navigation.

WitMotion WTGAHRS1, 10-axlig AHRS-modul med ICM-42605 och AK8963 chip.Egenskaper 3-axlig accelerometer, gyroskop, magnetometer, GPS och TTL-gränssnitt. Stöder 3.3-5V, <50mA ström, 4800-921600 baud rate och ±250-2000 deg/s gyroområde.
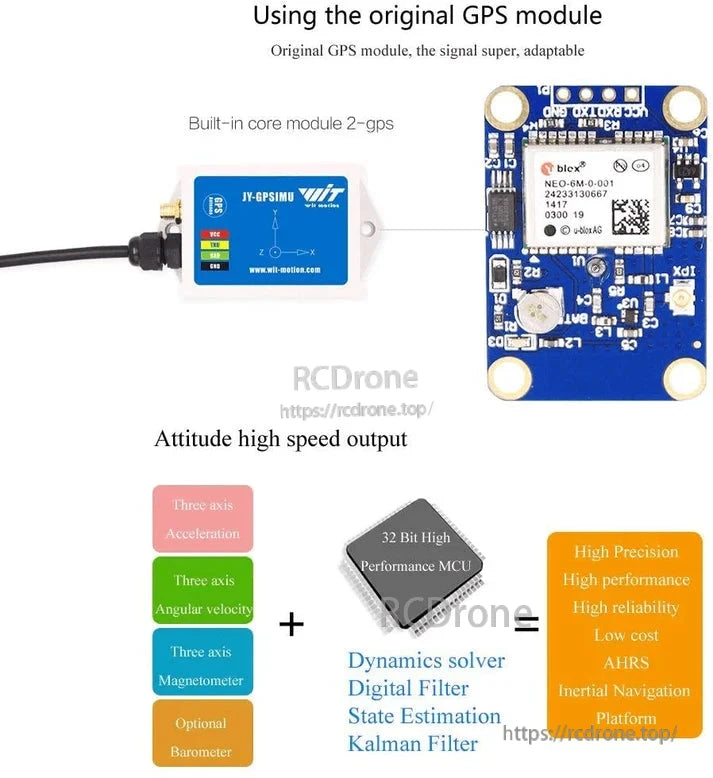
WitMotion WTGAHRS10-Axis AHRS inkluderar GPS, hög hastighet på attitydutgång, 32-bitars MCU och integrerade sensorer. Kombinerar acceleration, vinkelhastighet, magnetometer, valfri barometer med digitala och Kalman-filter för pålitlig, kostnadseffektiv inertial navigering.


WitMotion JY-GPSIMU 10-Axis AHRS med märkta ledningsfärger

Related Collections






