








WitMotion WTRTK-M ZED-F9P RTK GNSS GPS-modul, centimeterprecision för UAV/bil, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS-modul, centimeterprecision för UAV/bil, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Det gick inte att ladda hämtningstillgänglighet
Översikt
WTRTK-M är en högprecisions RTK differentialpositionering modul byggd på u-blox ZED-F9P GNSS-motorn. Den spårar GPS, GLONASS, Galileo, BeiDou och QZSS samtidigt och levererar centimeter-nivå noggrannhet efter RTK-korrigering. Modulen erbjuder dual-frekvens mottagning, 5 Hz realtidsutgång för kartläggning/autonoma applikationer, och ett PC-verktyg för enkel konfiguration av mobila/basstationer och ruttvisualisering. Anti-interferens och kalibreringstekniker förbättrar datastabilitet och säkerhet.
Nyckelfunktioner
-
Centimeter-nivå RTK: mobil/bas arbetsflöde med snabb konvergens.
-
Multi-konstellation, dual-frekvens: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Hög känslighet &och snabb start: 184 kanaler; kallstart 24 s, varmstart 2 s, återfångst 2 s; konvergens ≤10 s.
-
Tid/huvudprestanda: 1PPS RMS 30 ns (99% 60 ns); huvudnoggrannhet 0.4° (dynamisk 0.3°).
-
Rika protokoll: NMEA, UBX, RTCM 3.3; bärarfas (RAWX) stöds.
-
Konfigurerbar hastighet &och 1 PPS: 0.25–20 Hz uppdatering (standard 1 Hz); andra pulsen 0.25 Hz–10 MHz (standardperiod 1 s, hög nivå ~100 ns).
-
Dubbla UART (TTL) och SMA-K / IPEX antennalternativ; PC-programvara för att visa spår och enhetsinställning.
-
Tillämpningsscenarier: UAV-undersökning/kartläggning, autonoma traktorer/AGV, högprecisionsfordonsnavigering, robotik.
Hur RTK fungerar (kort)
En fast basstation beräknar satellitmätfel i förhållande till sin kända position och sänder ut RTCM differentialsdata. Den mobila stationen tillämpar dessa korrigeringar för att uppnå realtids-, centimeter-nivå positionering.
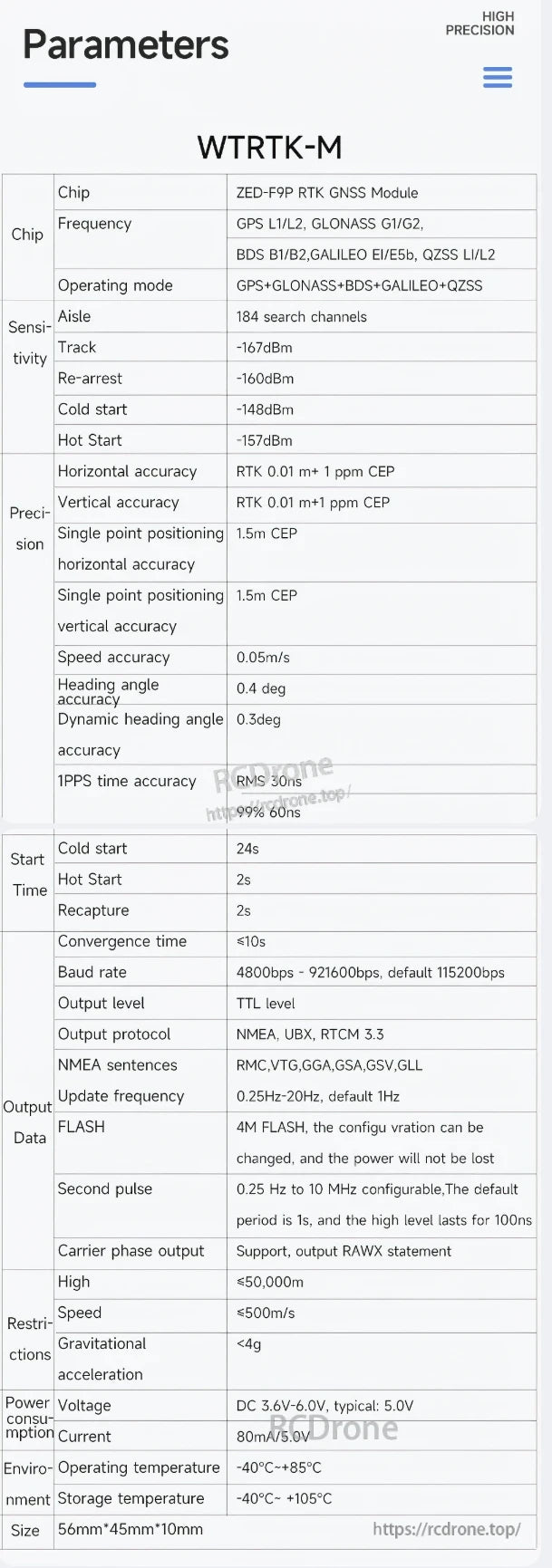
Kärnspecifikationer
| Artikel | Spec |
|---|---|
| GNSS-chip | ZED-F9P RTK GNSS-modul |
| Konstellationer/Band | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Kanal | 184 sökkanaler |
| Känslighet | Spårning -167 dBm; återfångst -160 dBm; kallstart -148 dBm; varmstart -157 dBm |
| RTK-noggrannhet (CEP) | Horisonell/Vertikal: 0.01 m + 1 ppm CEP |
| Enpunktsnoggrannhet (CEP) | Horisonell 1.5 m, Vertikal 1.5 m |
| Hastighetsnoggrannhet | 0.05 m/s |
| Riktningsnoggrannhet | 0.4° (dynamisk 0.3°) |
| 1PPS tidsnoggrannhet | RMS 30 ns, 99% 60 ns |
| Start/Återfångst | Kall 24 s, Varm 2 s, Återfångst 2 s; Konvergens ≤10 s |
| Baud-hastighet | 4 800–921 600 bps (standard 115 200 bps) |
| Elektrisk nivå | TTL |
| Protokoll | NMEA, UBX, RTCM 3.3; NMEA meningar: RMC/VTG/GGA/GSA/GSV/GLL |
| Uppdateringsfrekvens | 0.25–20 Hz (standard 1 Hz); notera: mycket höga frekvenser ökar seriell belastning—håll ≤ 5 Hz för tillförlitlighet |
| Inbyggd flash | 4 MB, behåller konfiguration efter strömavbrott |
| Bärarfas | RAWX utdata stöds |
| Begränsningar | Höjd ≤ 50 000 m; Hastighet ≤ 500 m/s; Acceleration < 4 g |
| Strömförsörjning | DC 3.6–6.0 V (typ. 5.0 V), ≈ 80 mA @ 5 V |
| Drift / Lagring | -40 °C till +85 °C / -40 °C till +105 °C |
| Mått | 56 × 45 × 10 mm (framdiaagrammärken ~46 mm höjd) |
Gränssnitt &och indikatorer
Antenna: SMA-K (med IPEX alternativ).
UART-portar (TTL, 4-stift vardera):
-
P1 (höger) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (vänster) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
P2 används för att mata in/ut RTCM; P1 ger ut NMEA data. P1/P2 VCC är internt kopplade—ström från antingen en.
LED-lampor
-
PWR: Röd PÅ = ström tillförd.
-
TX1/TX2: Grön blinkar = port har datautgång.
-
PPS: Avstängd innan fix; blå blinkar efter 3D-positionering.
-
RTK: Avstängd när inte i RTK; blå blinkar i RTK Float; på i RTK Fixed.
Anslutning & Programvara
-
Trådad installation: anslut antenn till SMA; anslut UART1 till PC för att se positionsdata.
-
Bas/Mobil: ställ in en modul som bas (utgångar RTCM); den mobila konsumerar RTCM för att uppnå RTK—mobilen kan användas direkt som en RTK rover efter att ha mottagit korrigeringar.
-
PC-programvara: spårvisualisering, datavy och konfiguration av bas/rover med ett knapptryck.
Anteckningar
-
Standard baud är 115 200 bps. Om du höjer utgångsfrekvensen, öka baud i enlighet med detta för att undvika överflöd (praktisk övre hastighet ≤ 5 Hz på standardlänkar).
-
Anpassad utveckling stöds.
Detaljer
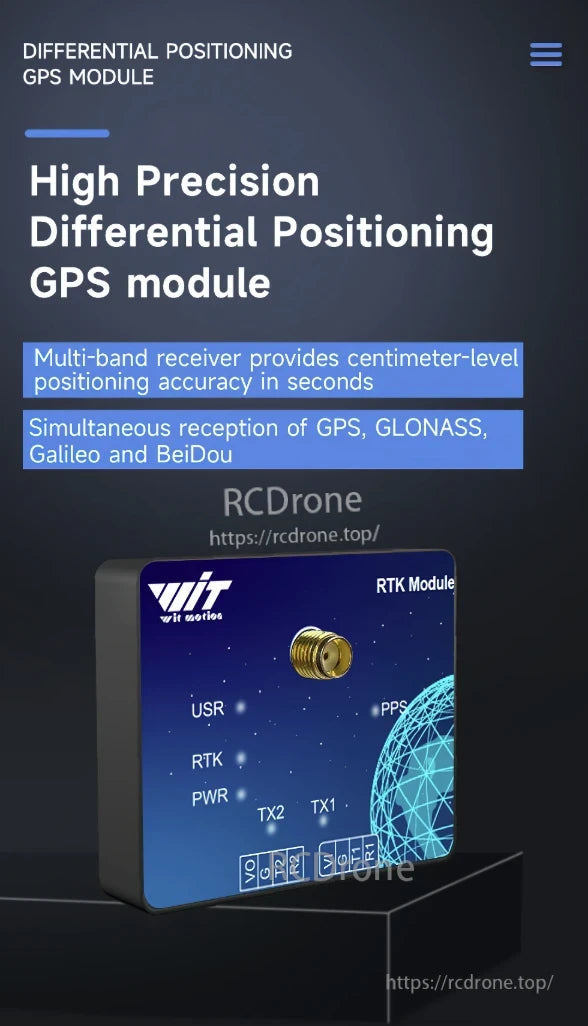
Högprecisionsdifferentialpositionerings-GPS-modul med centimeter-nivå noggrannhet. Stöder GPS, GLONASS, Galileo, BeiDou.Multi-bandmottagare, RTK-teknik, PPS, TX1, TX2, USR, RTK, PWR-indikatorer.
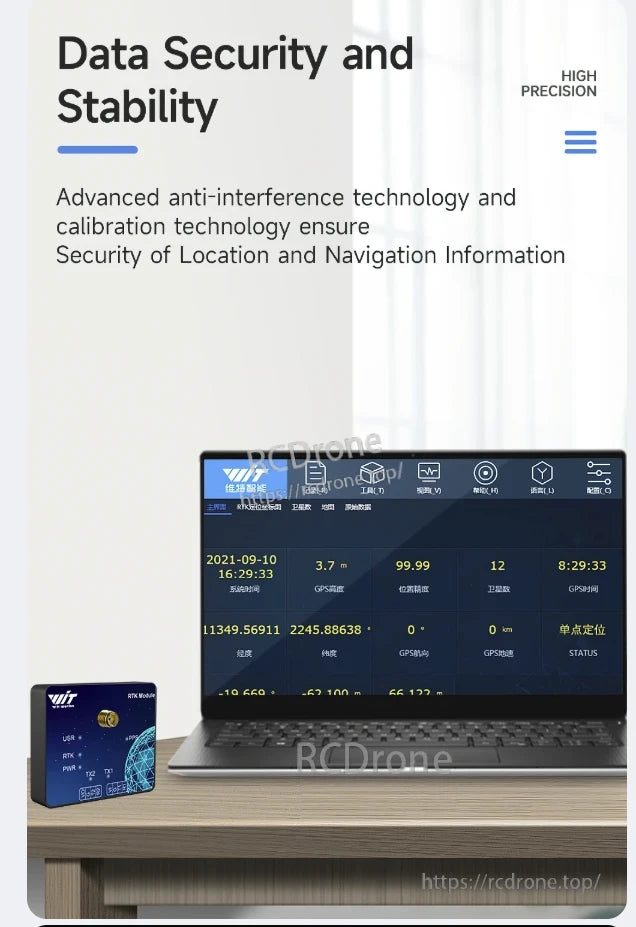
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS säkerställer hög precision, dataskydd och stabilitet med avancerad anti-interferens och kalibreringsteknik för pålitlig plats- och navigationsinformation.
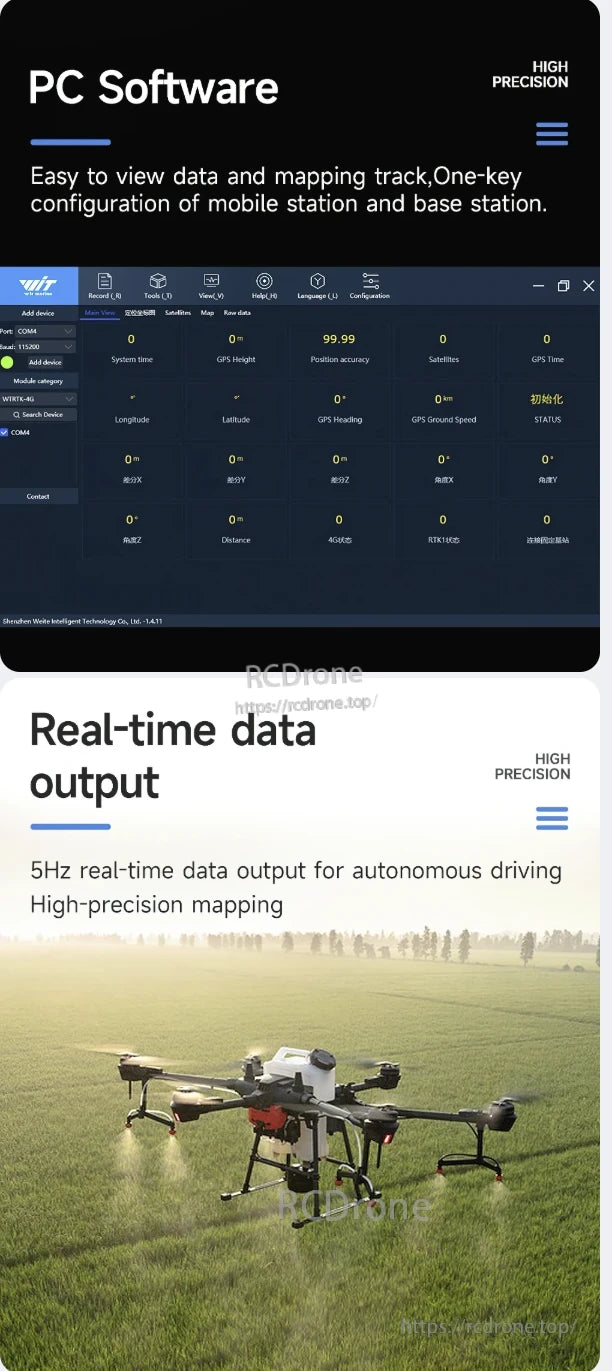
Högprecisions RTK GNSS GPS-programvara med 5Hz realtidsdatautgång för autonom körning och kartläggning. Stöder enkel inställning, satellitspårning, noggrann positionering och detaljerad telemetri.
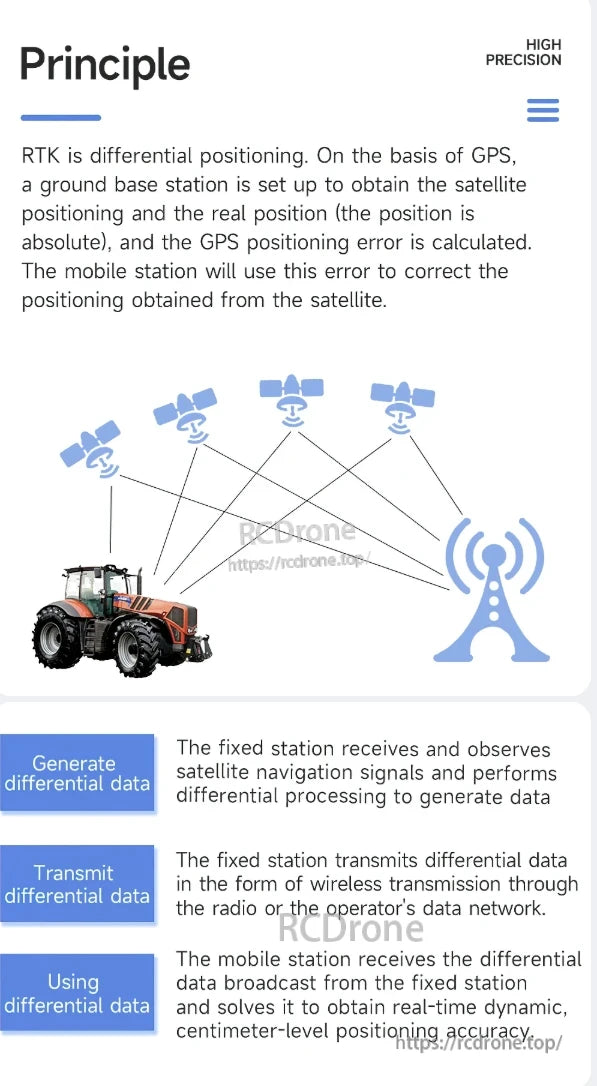
RTK använder differentialpositionering med GPS. En fast station beräknar satellitpositioneringsfel och överför korrigeringar trådlöst till en mobil station, vilket möjliggör centimeter-nivå realtidsnoggrannhet för precis navigering.
WTRTK-M har ZED-F9P RTK GNSS-modul med stöd för flera konstellationer, hög precision (0.01m), snabba starttider, flera protokoll och fungerar från -40°C till +85°C.


Kopplingsschema för trådbunden anslutning för WitMotion RTK-modul: bas/mobilstationer, SMA-antennor, UART1 PC-anslutningar. Inkluderar programvara, manual, video och protokollresurser.
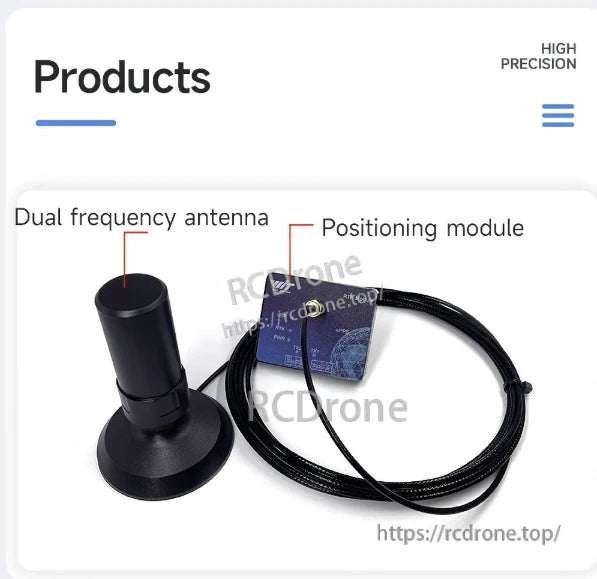
Dubbelfrekvensantenn och positioneringsmodul för hög precision GNSS GPS
Related Collections








