






Yahboom YB-EET01-V2.0 Micro ROS-styrkort för Raspberry Pi 5 Robot, ESP32-S3, ROS2
Yahboom YB-EET01-V2.0 Micro ROS-styrkort för Raspberry Pi 5 Robot, ESP32-S3, ROS2
Yahboom
Det gick inte att ladda hämtningstillgänglighet
Översikt
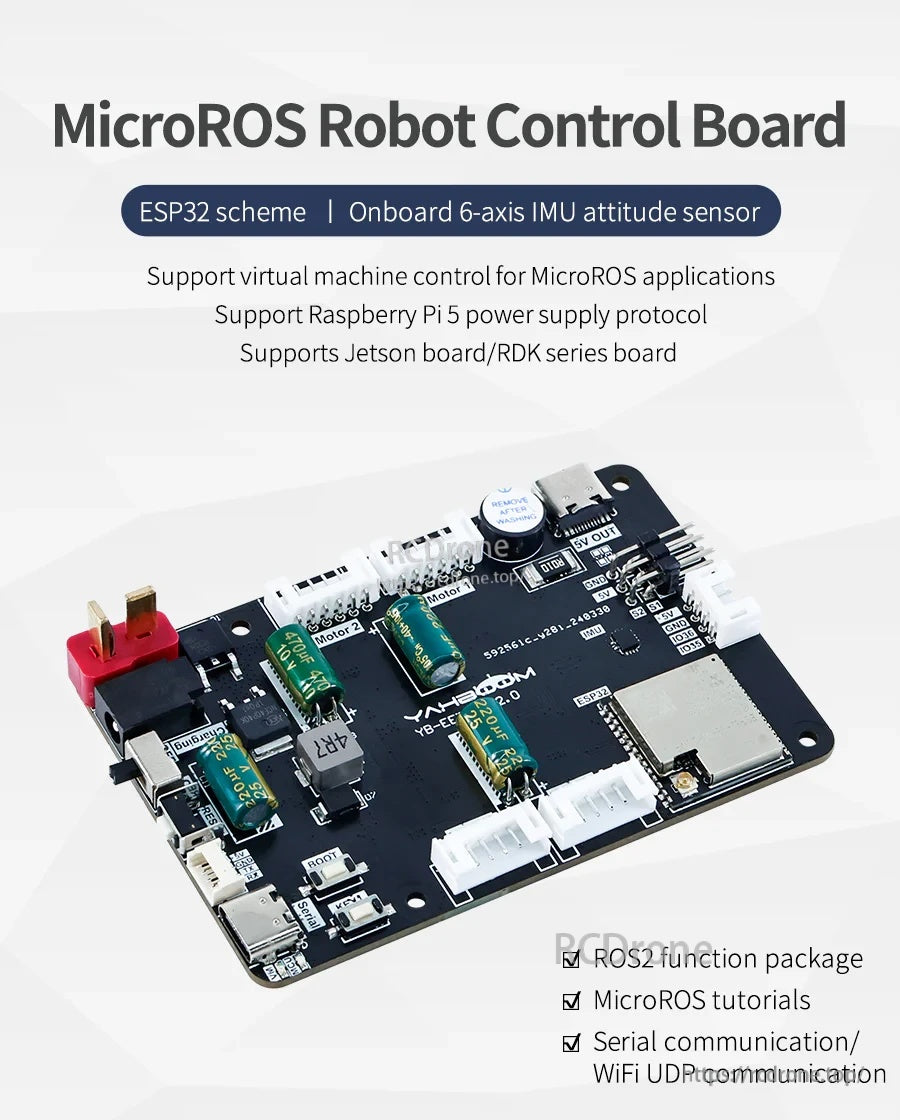
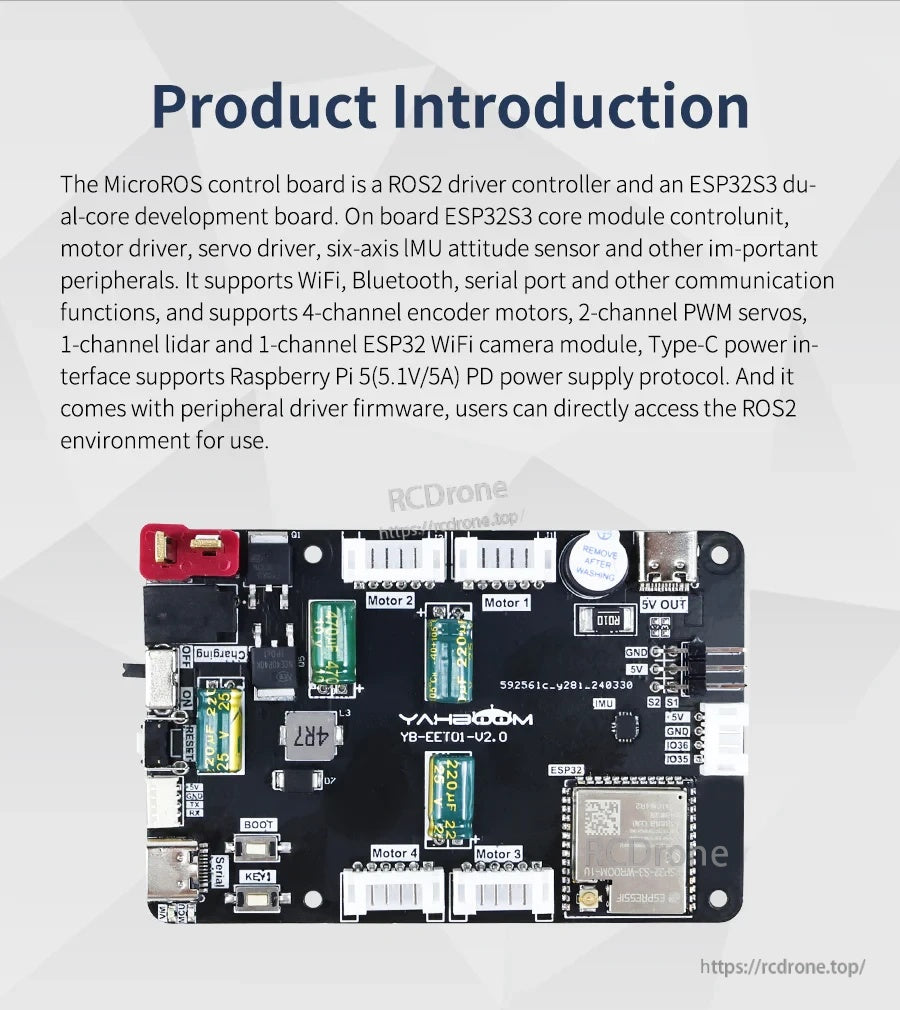
Denna Micro ROS kontrollkort (MicroROS Robot Control Board) är ett Raspberry Pi 5 robot expansionskontrollkort designat för ROS2 robotprojekt. Det integrerar en ESP32-S3 co-processor, 4-kanals encoder motorstyrning, 2-kanals PWM servo utgångar, en laser lidar seriell gränssnitt, och en inbyggd 6-axlig IMU attityd sensor. MicroROS firmware är förinstallerad före leverans för kommunikation med enheter som kör ROS2.
Nyckelfunktioner
- ESP32-S3 co-processor för MicroROS: stöder MicroROS utveckling och kan användas i WiFi-UDP LAN-läge eller seriell kommunikationsläge.
- Raspberry Pi 5 PD strömstöd: Typ-C strömgränssnitt stöder Raspberry Pi 5 (5.1V/5A) PD strömförsörjningsprotokoll.
- Robot I/O integration: 4-kanals motorstyrning med encoder hastighetsmätning, två PWM servo gränssnitt, lidar kommunikationsgränssnitt, buzzer, LED indikatorer, och anpassade knappar.
- Flera kommunikationsmetoder: WiFi-UDP och seriell port; stöder även WiFi, Bluetooth och I2C kommunikation.
- Lidar och motoranslutning uppmärksamhet: lidar/motorutrustning måste matcha brädans gränssnitt och ledningssekvens; MS200 lidar och 310 motor rekommenderas.
- ROS-version: stöder endast ROS2 (inte ROS1). Inkluderar ROS2 funktionspaket och MicroROS handledningar.
- Extern antenn ingår: extern förstärkningsantenn tillhandahålls för att förbättra trådlös signalpålitlighet för WiFi och Bluetooth kommunikation (IPEX 1:a generationens gränssnitt).
Specifikationer
| Produkttyp | Micro ROS kontrollkort / Raspberry Pi 5 robot expansionskontrollkort |
| Bräda märkning (modell) | YB-EET01-V2.0 |
| ROS stöd | ROS2 |
| MicroROS | Support |
| Kommunikationslägen | WiFi-UDP (LAN), Seriell port |
| Övriga kommunikationer | WiFi, Bluetooth, I2C |
| Motorstyrning | Motor x4 (4-kanal), encoder hastighetsmätning x4; stödjer PID hastighetskontroll |
| Servo utgångar | PWM servo gränssnitt x2 |
| Lidar gränssnitt | Laser lidar seriellt gränssnitt x1 |
| UART port | 1-kanals UART (kan ansluta WiFi kamera modul / ESP32 WiFi kamera modul) |
| IMU | 6-axlig IMU hållningssensor (3-axlig accelerometer + 3-axlig gyroskop) |
| IMU I2C kommunikationshastighet | 400KHz |
| IMU dataläsningsfrekvens | 400Hz |
| Anpassad GPIO | Anpassad GPIO x2 |
| Indikatorer & varningar | LED indikatorljus x2, buzzer |
| Rekommenderad motor spänning | 7.4V |
| Strömgränssnitt | Typ-C; stöder Raspberry Pi 5 (5.1V/5A) PD strömförsörjningsprotokoll |
| Antenna gränssnitt | IPEX antenn 1:a generationens gränssnitt |
ESP32 Modul (inbyggd)
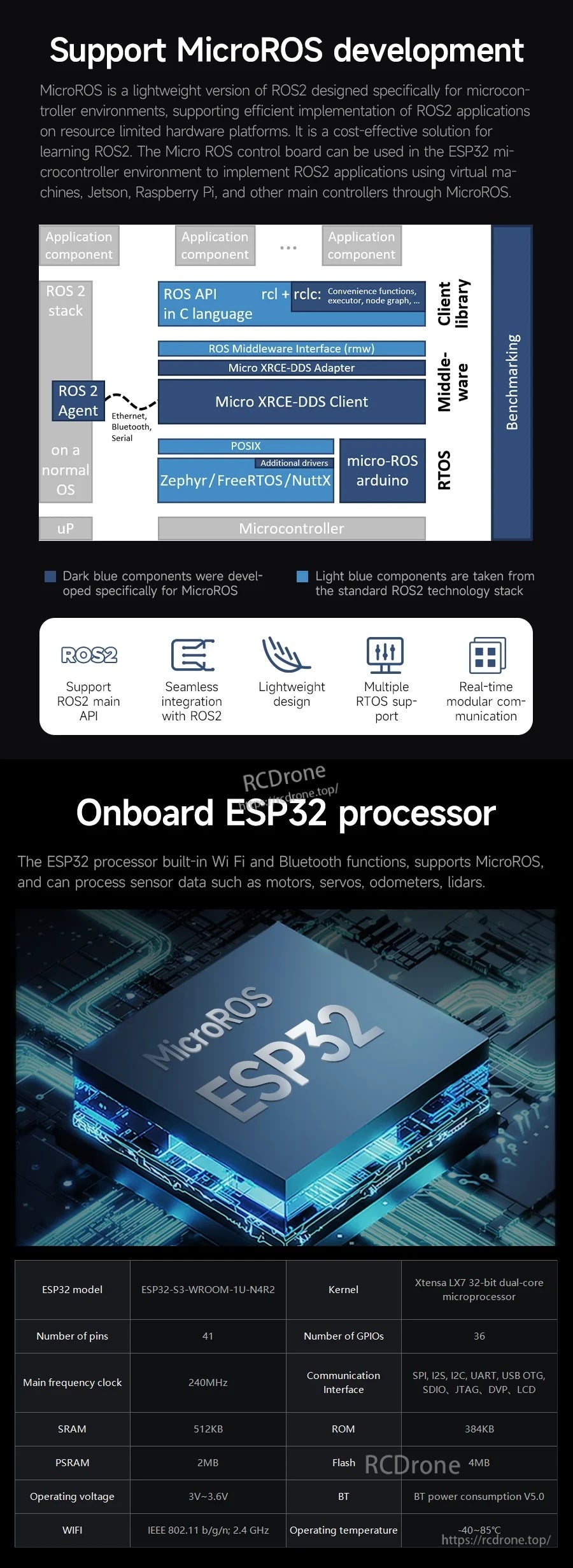
| ESP32 modell | ESP32-S3-WROOM-1U-N4R2 |
| Kärna | Xtensa LX7 32-bitars dual-core mikroprocessor |
| Huvudfrekvensklocka | 240MHz |
| Antal stift | 41 |
| Antal GPIOs | 36 |
| Kommunikationsgränssnitt | SPI, I2S, I2C, UART, USB OTG, SDIO, JTAG, DVP, LCD |
| SRAM | 512KB |
| ROM | 384KB |
| PSRAM | 2MB |
| Flash | 4MB |
| Driftspänning | 3V~3.6V |
| WiFi | IEEE 802.11 b/g/n; 2.4 GHz |
| Bluetooth | V5.0 |
| Driftstemperatur | -40~85C |
Gränssnittslinje sekvenser (som märkt)
| Lidar-kontakt | MX1.25MM-4P |
| Lidar-stiftsekvens | 5V, GND, TX, RX |
| Motor-kontakt | PH2.0MM-6P |
| Motor gränssnittslinje sekvens | H1B, H1A, 3V3, GND, M1-, M1+ |
Tillämpningar
- Fjärrkommunikationsläge: PC virtuell maskin kommunicerar via WiFi-UDP inom LAN för att utveckla ROS robotapplikationer.
- Utvecklingskortets anslutningsläge: Raspberry Pi 5 / RDK-seriens kort / Jetson-seriens kort ansluts via seriell kommunikation för ROS-robotapplikationsutveckling.
- ESP32-läge: kan användas som ett ESP32-utvecklingskort för ROS-robotar.
För frågor om kompatibilitet och kablage före köp, kontakta [email protected] or besök https://rcdrone.top/.
Manualer
- Handledningar: http://www.yahboom.net/study/MicroROS-Board
Detaljer

Utforska Yahboom ROS-seriens robotplattformar som kan byggas kring kompatibel ROS2-kontrollhårdvara.

Bygg en Raspberry Pi 5-robotbil som kommunicerar med ROS2 för uppgifter som SLAM-kartläggning och navigering.
YB-EET01-V2.0 integrerar en ESP32-S3 co-processor och inbyggd 6-axlig IMU för MicroROS-kommunikation med ROS2.

WiFi-UDP och seriell kommunikation alternativ stöds tillsammans med motor, encoder, IMU och lidar gränssnitt.
Förinstallerad MicroROS firmware hjälper till att ansluta kontrollkortet till en ROS2-miljö med minimal installation.
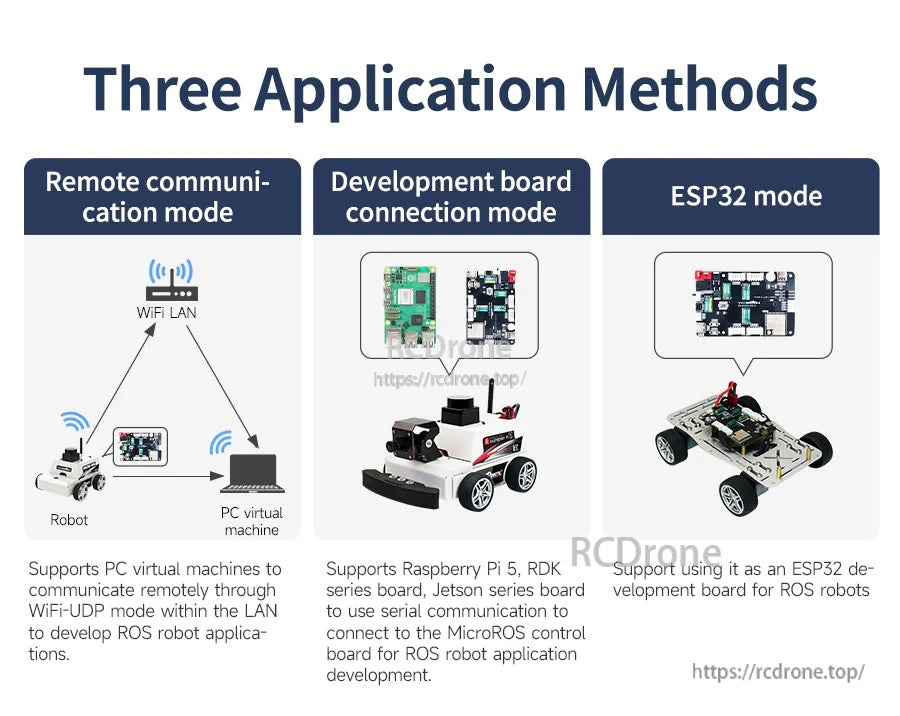
Välj mellan WiFi LAN fjärrkommunikation, direkt anslutning av utvecklingskortet, eller användning av ESP32-läget för ROS-projekt.
ESP32-S3 inbyggd bearbetning möjliggör MicroROS utveckling och flexibel anslutning för ROS2 robotapplikationer.
Fullt ROS2 systemstöd betonas, med relaterad dokumentation och tekniska supportresurser.

Fjärrkommunikation över WiFi-UDP kan användas med en PC virtuell maskin, Raspberry Pi, eller Jetson-baserad installation.
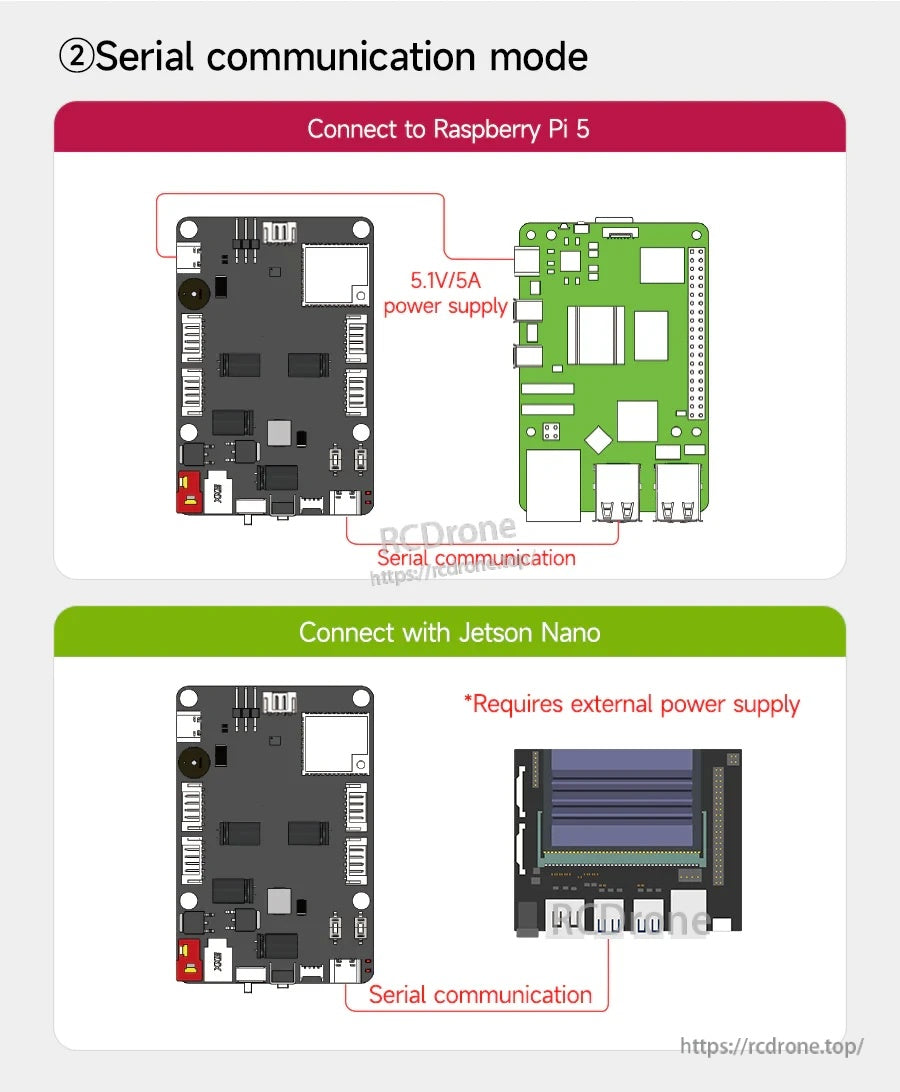
Seriemode ger ett direkt anslutningsalternativ till Raspberry Pi 5, med en separat extern strömnot för Jetson Nano.
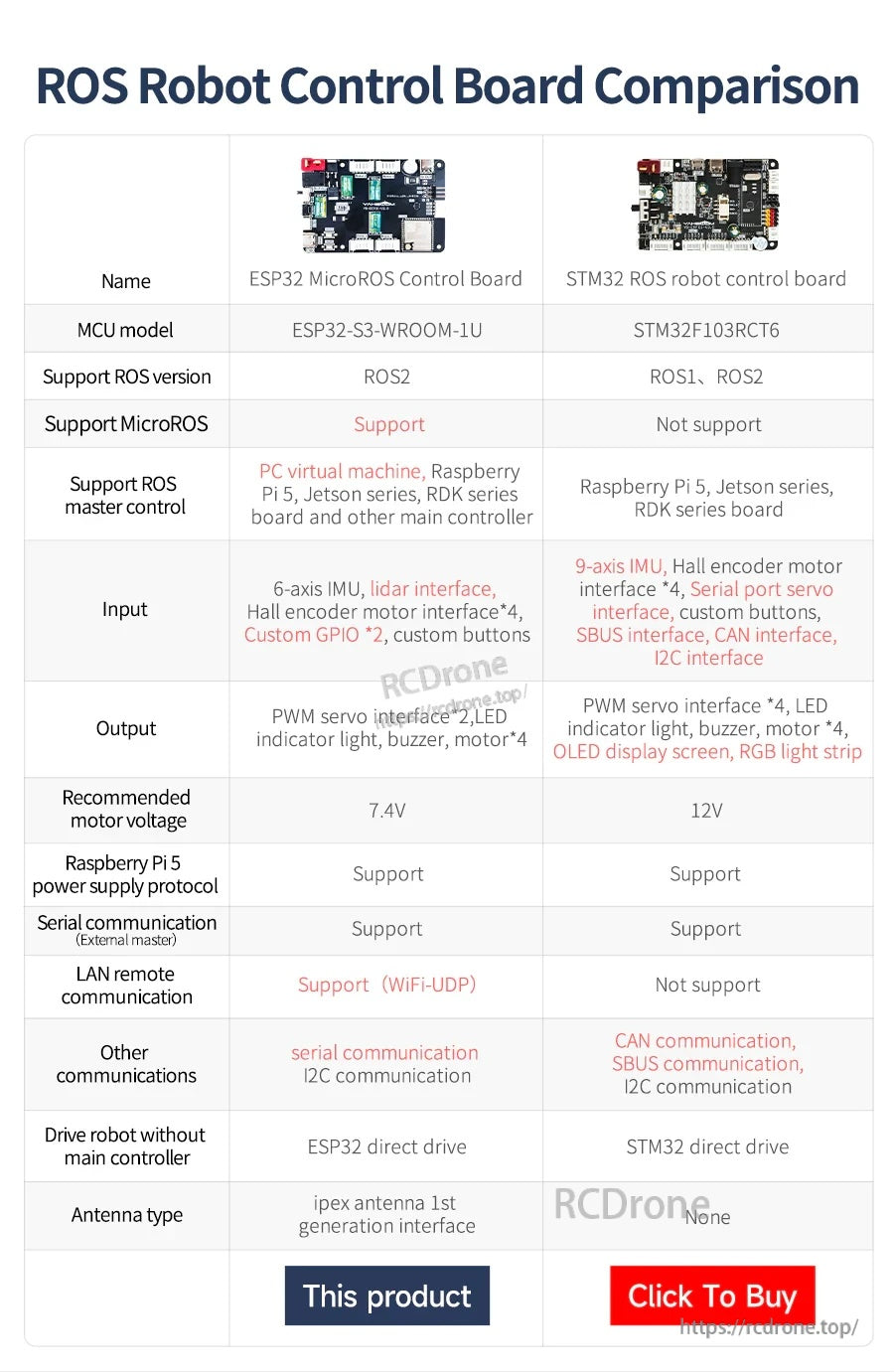
En sid-vid-sid jämförelse hjälper till att klargöra skillnader i ROS-stöd, gränssnitt och kommunikationsmetoder.
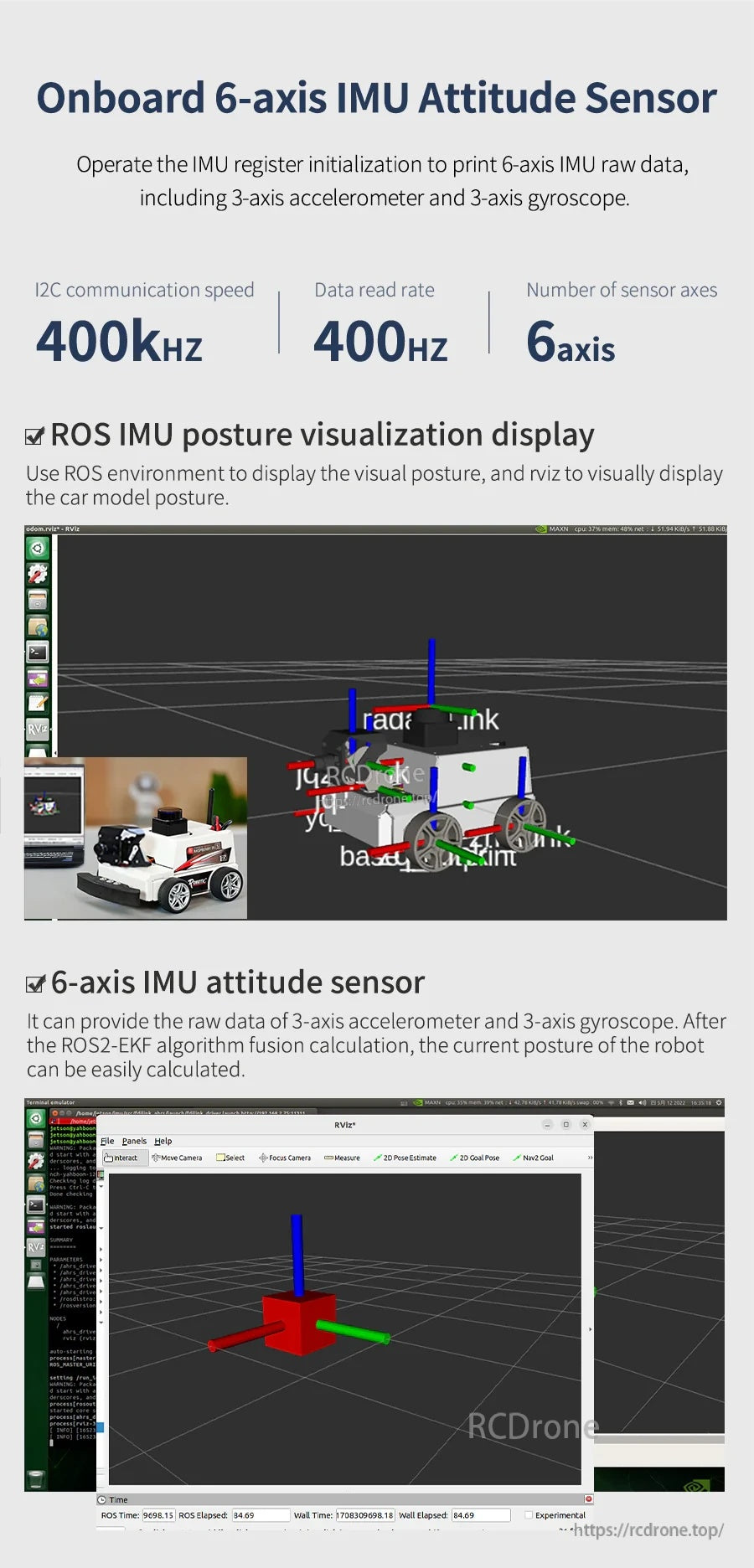
Den inbyggda 6-axliga IMU:n stöder hög hastighet I2C-kommunikation och frekventa datauppdateringar för hållningsvisualisering i ROS.
En extern förstärkarantenn ingår för att förbättra trådlös tillförlitlighet för WiFi- och Bluetooth-kommunikation.
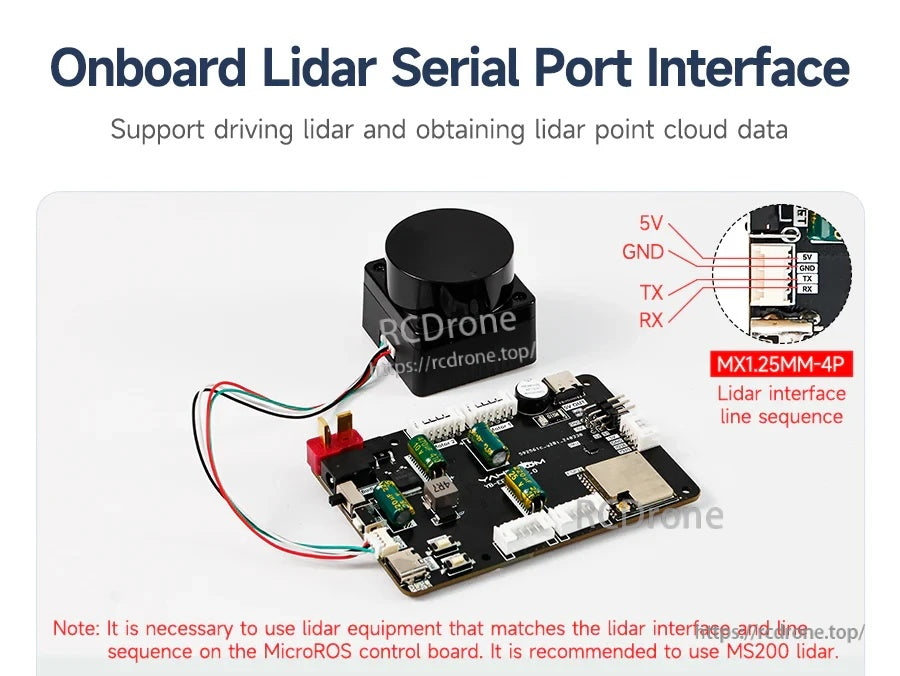
En dedikerad laser lidar seriell gränssnitt med tydlig pin-sekvensering hjälper till att förenkla lidar-integration för ROS2-robotar.
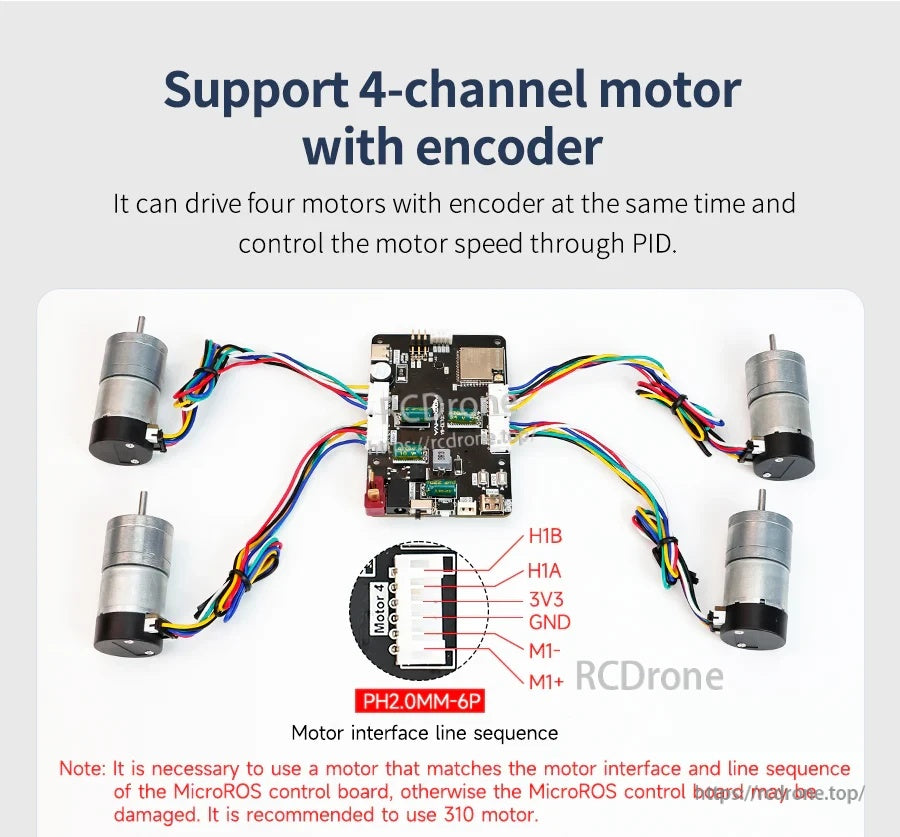
Driv upp till fyra encoder-motorer och håll kablarna i linje med den märkta kontaktsekvensen för stabil kontroll.


Två 5V PWM servo-utgångar stöder vanliga servo-drivna moduler som små gimbaler.


Micro ROS2 kontrollkortet ansluter till en ESP32 WiFi-kameramodul via sitt inbyggda GPIO-gränssnitt för kameraintegration.

En ROS2 WiFi-kameramodul finns som ett valfritt tillbehör för kompatibla Raspberry Pi-robotbyggen.

YB-EET01-V2.0 kontrollkortet inkluderar ett 5.1V/5A strömförsörjningssystem med skydd mot omvänd ström, kortslutning och överström.
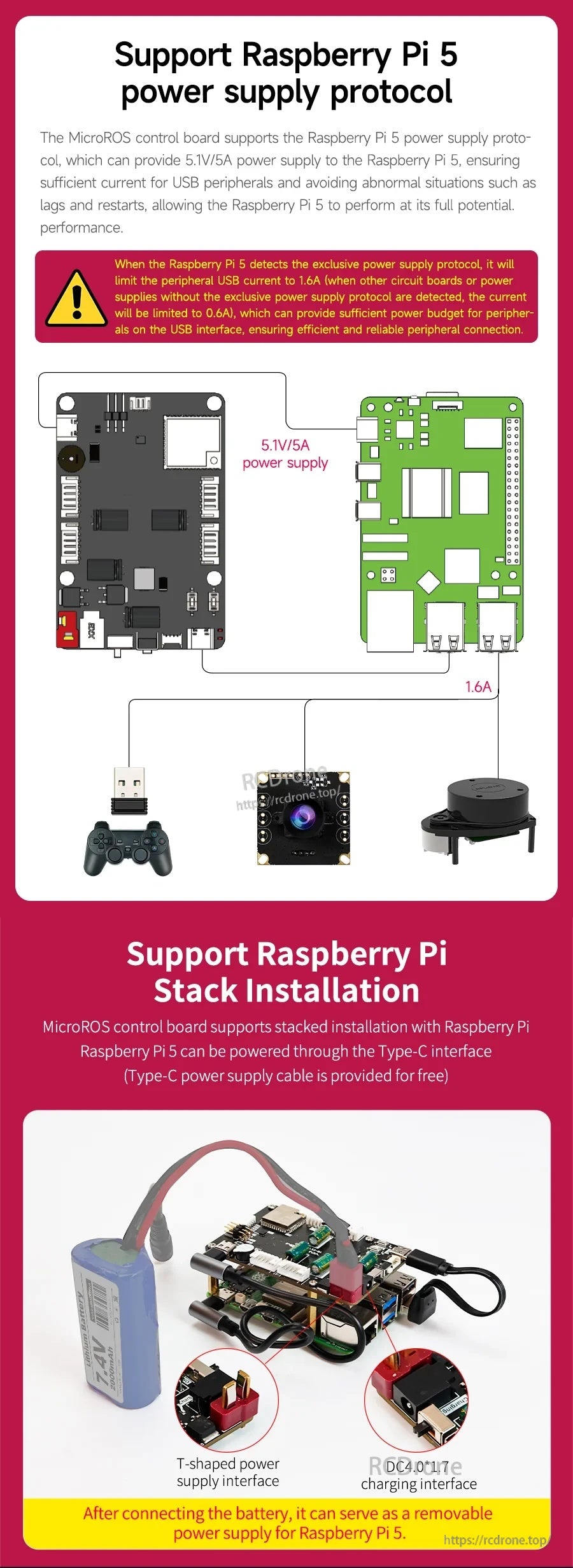
Yahboom mikro ROS kontrollkortet stöder Raspberry Pi 5 strömförsörjningsprotokoll och en stapelbar layout med 5V/5A strömförsörjning.

Öppen källkodsmaterial och kod stöder Micro ROS2 utvecklingsrutiner som motorstyrning, PWM servo kontroll och sensoravläsning.
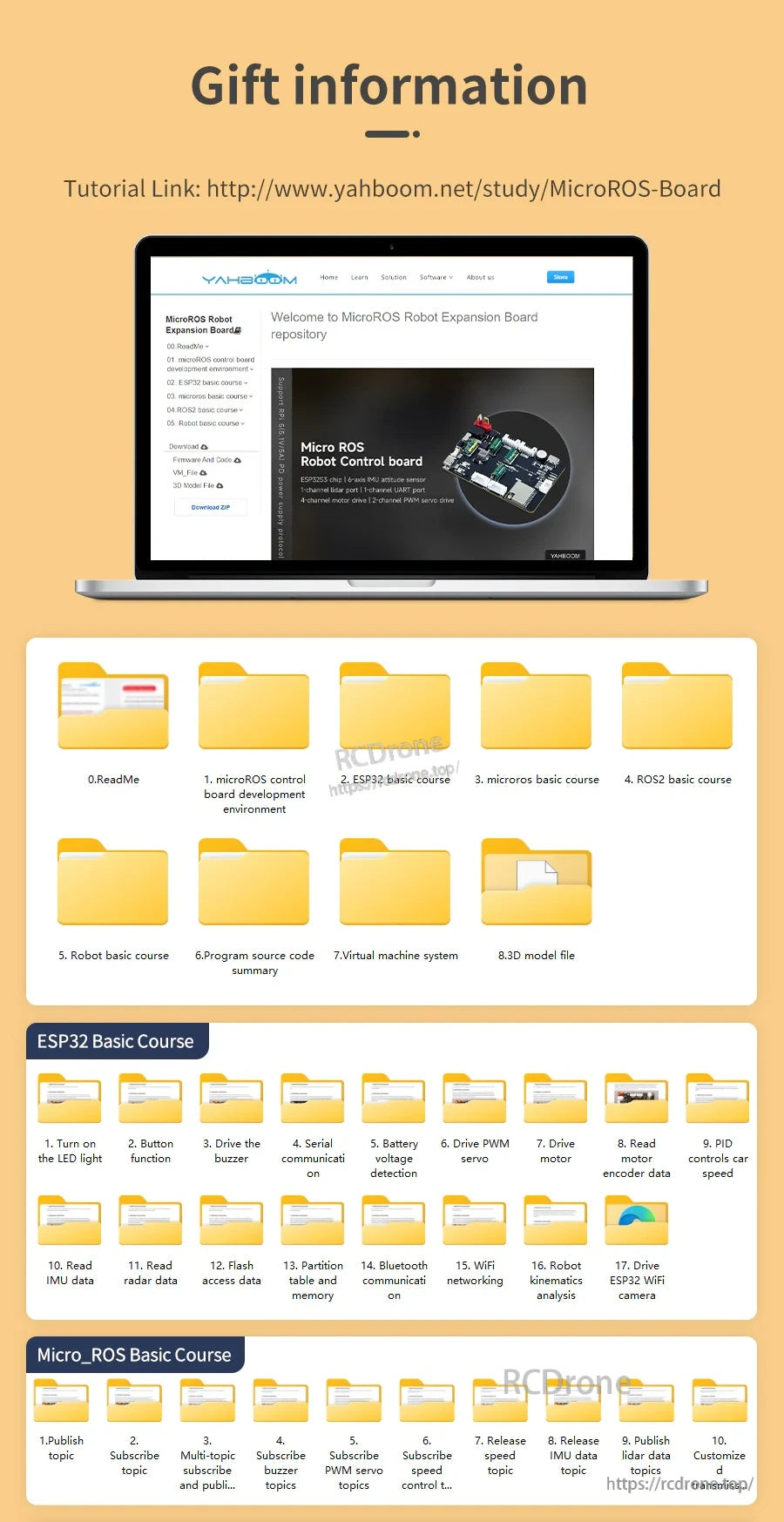
Yahboom tillhandahåller en handledningslänk och nedladdningsbara kursfiler för ESP32-grunder och mikro-ROS för att stödja installation och lärande.
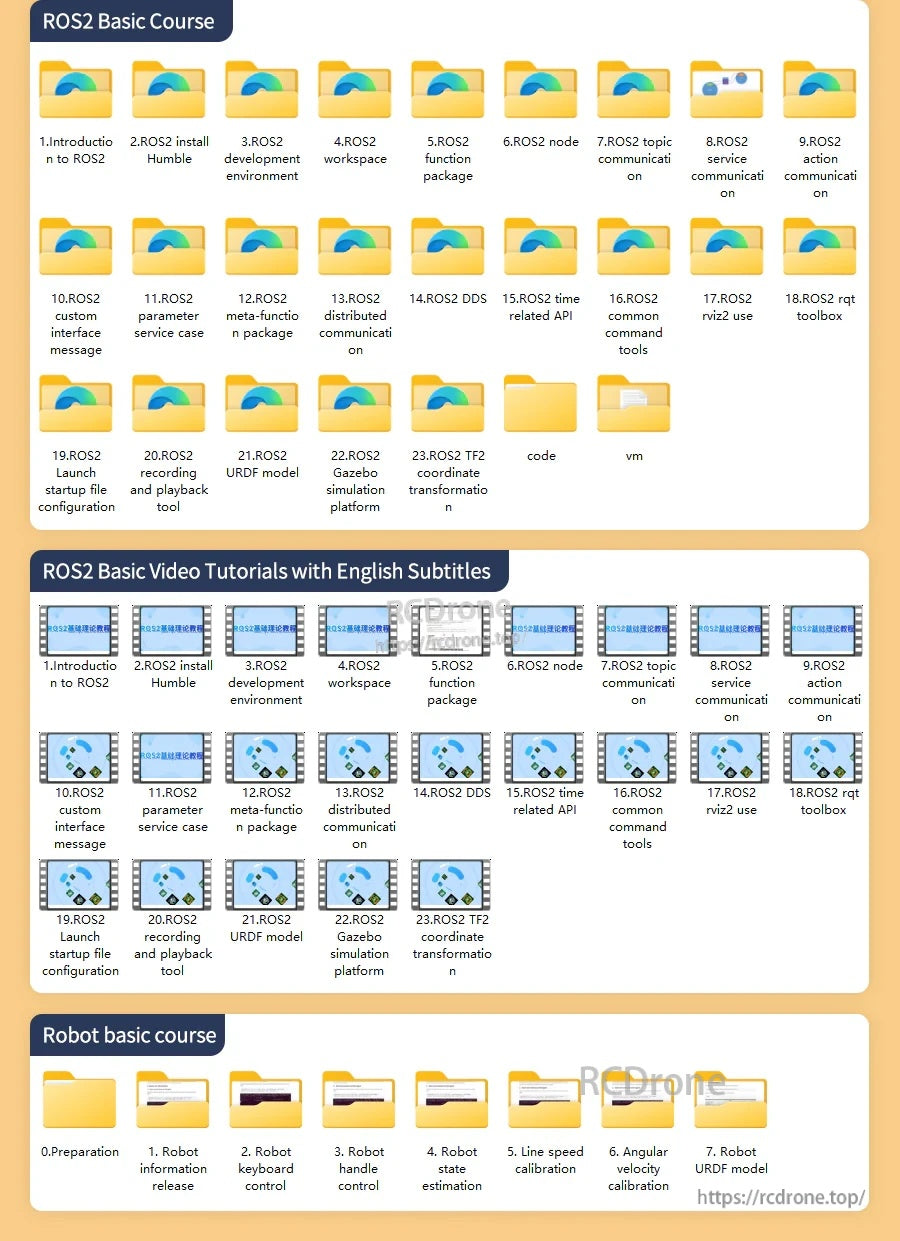
ROS2 grundkursfiler, videohandledningar med engelska undertexter och en robotgrundkurs erbjuder strukturerade lärresurser för ROS2-projekt.

Yahboom YB-EET01-V2.0 Micro ROS-kontrollkortet används i Micro ROS och Raspberry Pi 5 robotbilbyggen för ROS2-baserade projekt.
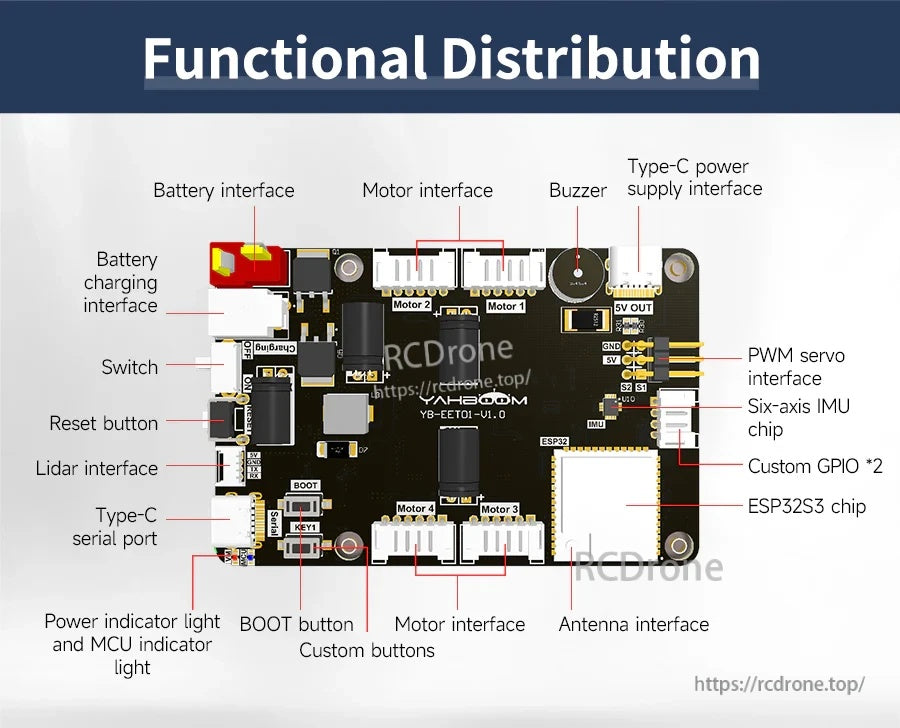
YB-EET01-V2.0-kortet tillhandahåller märkta kontakter för batteriladdning, motorutgångar, USB-C ström/seriel, PWM-servon, LiDAR och en ESP32-S3-modul.
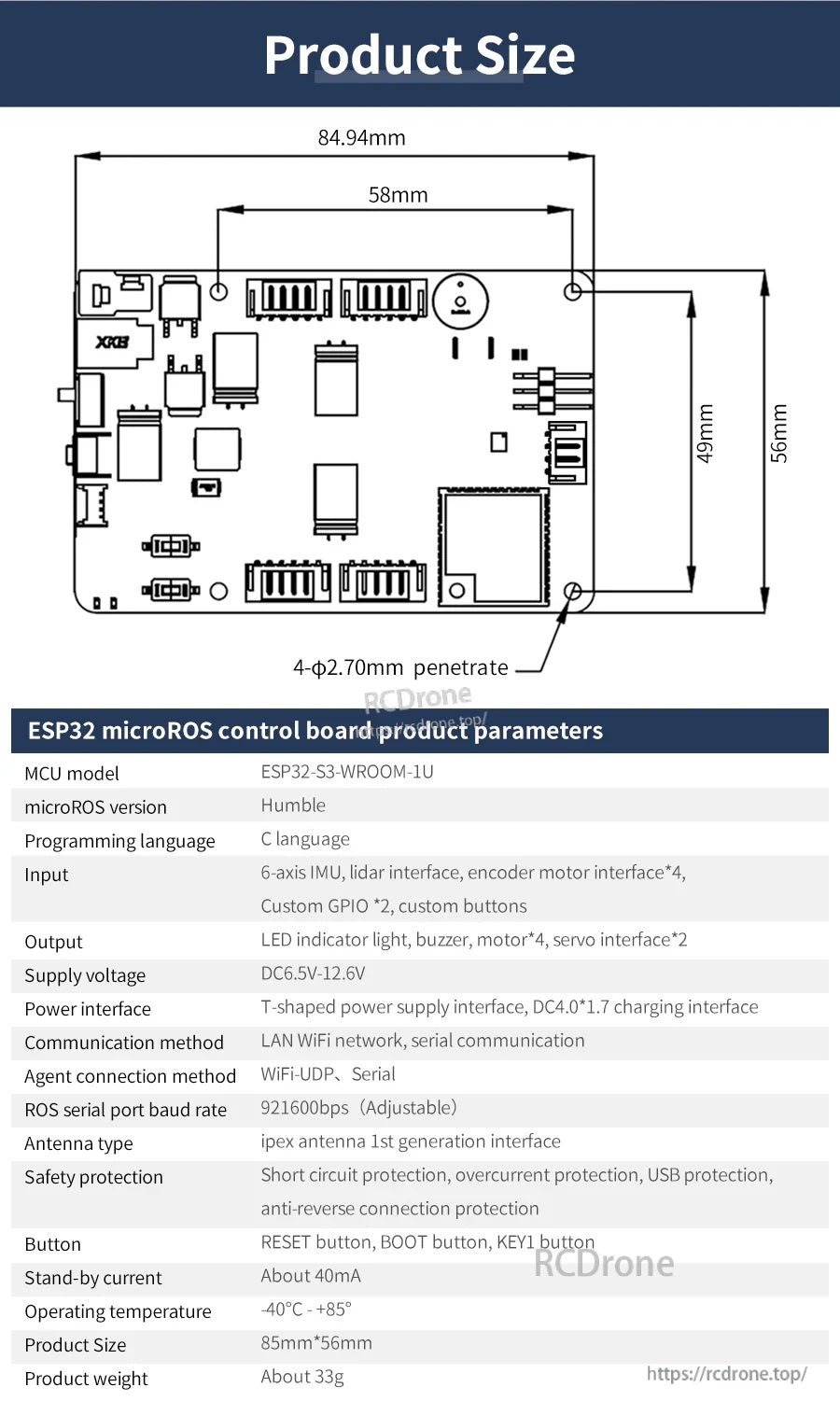
ESP32-S3 micro-ROS-kontrollkortet mäter cirka 85×56 mm och inkluderar märkta motor-, servo- och sensorgränssnittsanslutningar samt RESET/BOOT-knappar.

Förpackningen innehåller ESP32 microROS robotkontrollkortet tillsammans med en USB‑C datakabel, en dubbeländad Type‑C strömkabel, en antenn och monteringshårdvara.
Related Collections






