Yahboom YB-ERF01 V3.0 ROS Robotkontrollkort, STM32F103RCT6, för Raspberry Pi 5/Jetson/RDK X3
Yahboom YB-ERF01 V3.0 ROS Robotkontrollkort, STM32F103RCT6, för Raspberry Pi 5/Jetson/RDK X3
Yahboom
Det gick inte att ladda hämtningstillgänglighet
Översikt
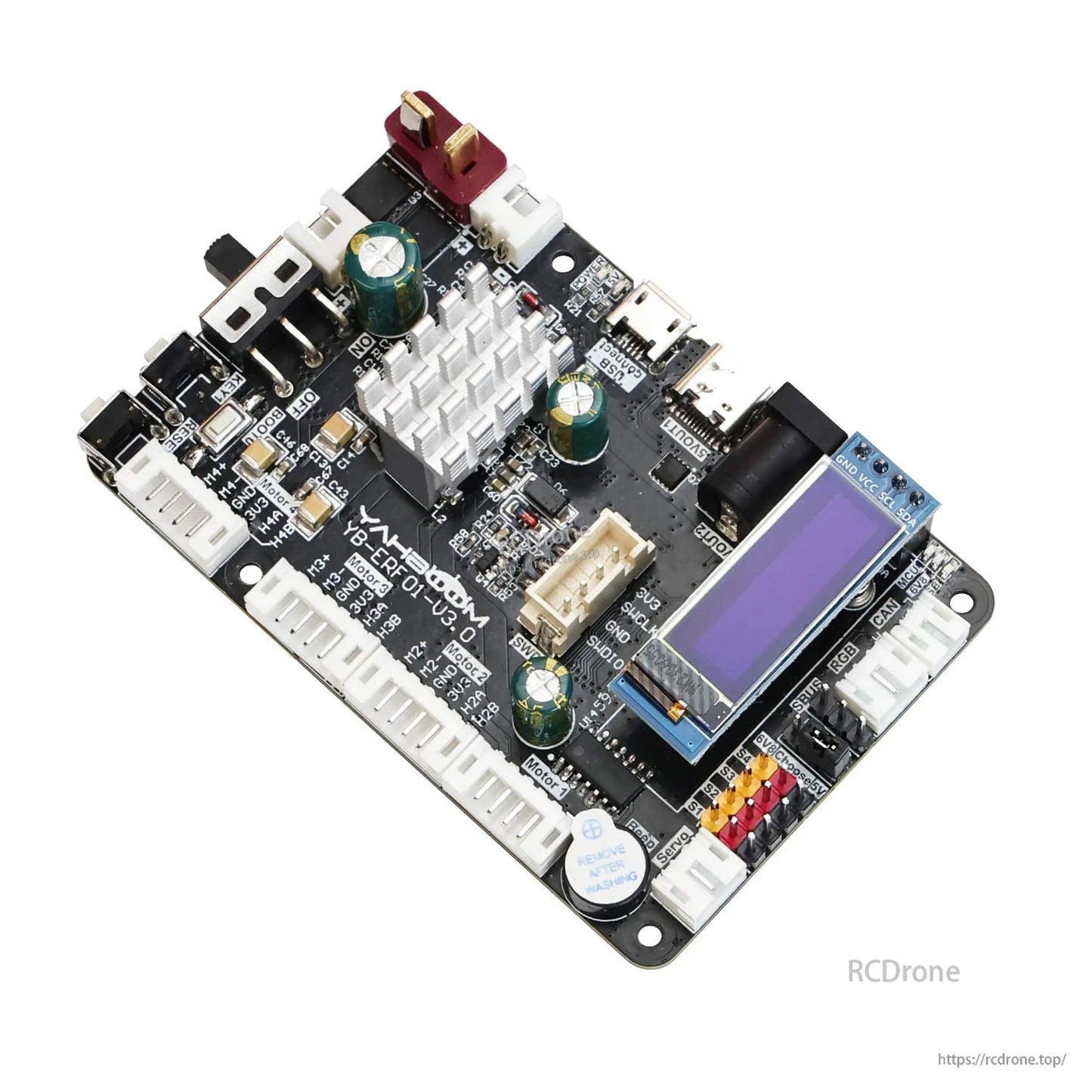
Detta ROS robotkontrollkort (V3.0) är ett robotutvidgnings-/kontrollkort designat för ROS-robotbilar och mobila robotprojekt, och det fungerar också som ett STM32 kärnutvecklingskort. Det integrerar en STM32 kärnkontrollenhet och en inbyggd 9-axlig IMU hållningssensor, och tillhandahåller gränssnitt för 4-kanals encodermotorer, 4-kanals PWM-servon, seriella bussservon och RGB-ljusskenor. Det stöder kommunikation och kraftsamarbete med Raspberry Pi 5 (inklusive Raspberry Pi 5 strömförsörjningsprotokoll), Jetson-seriens kort, RDK-seriens kort (inklusive RDK X3) och industriella datorer.
Nyckelfunktioner
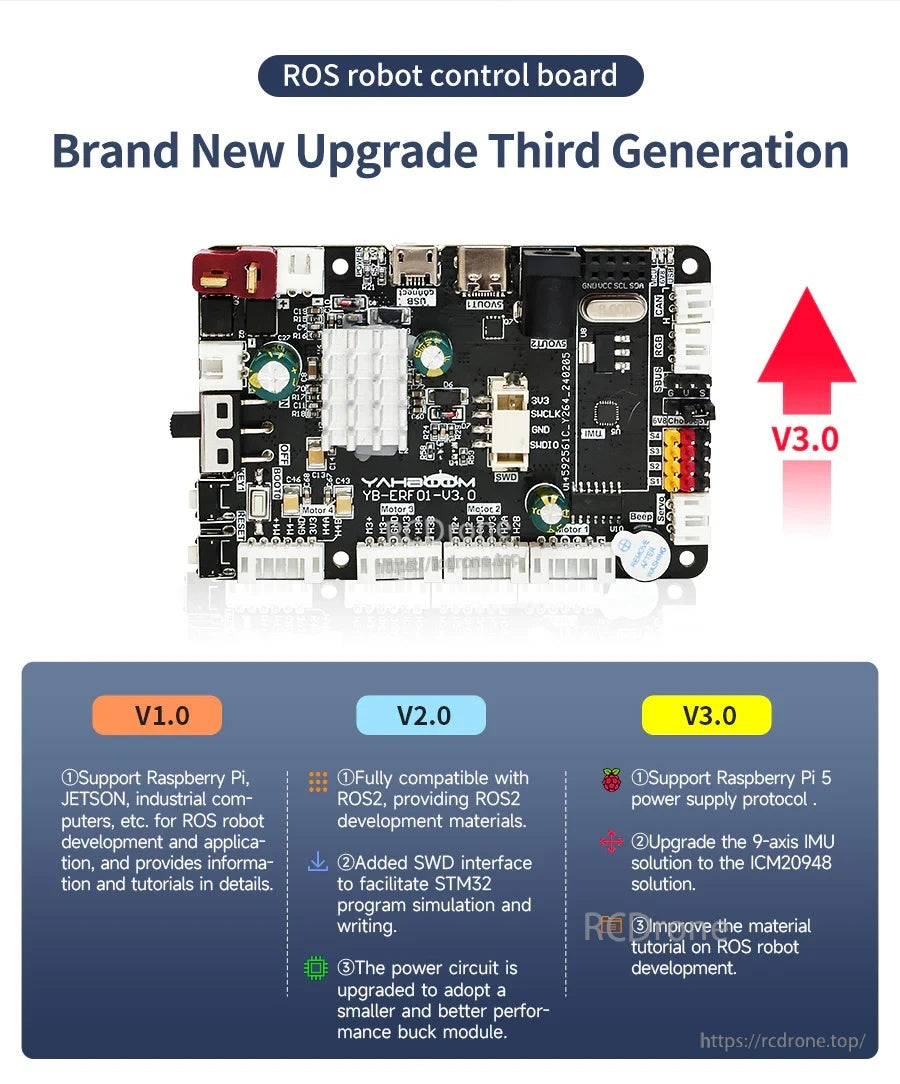
- Kortversion: V3.0 (tredje generationens uppgradering).
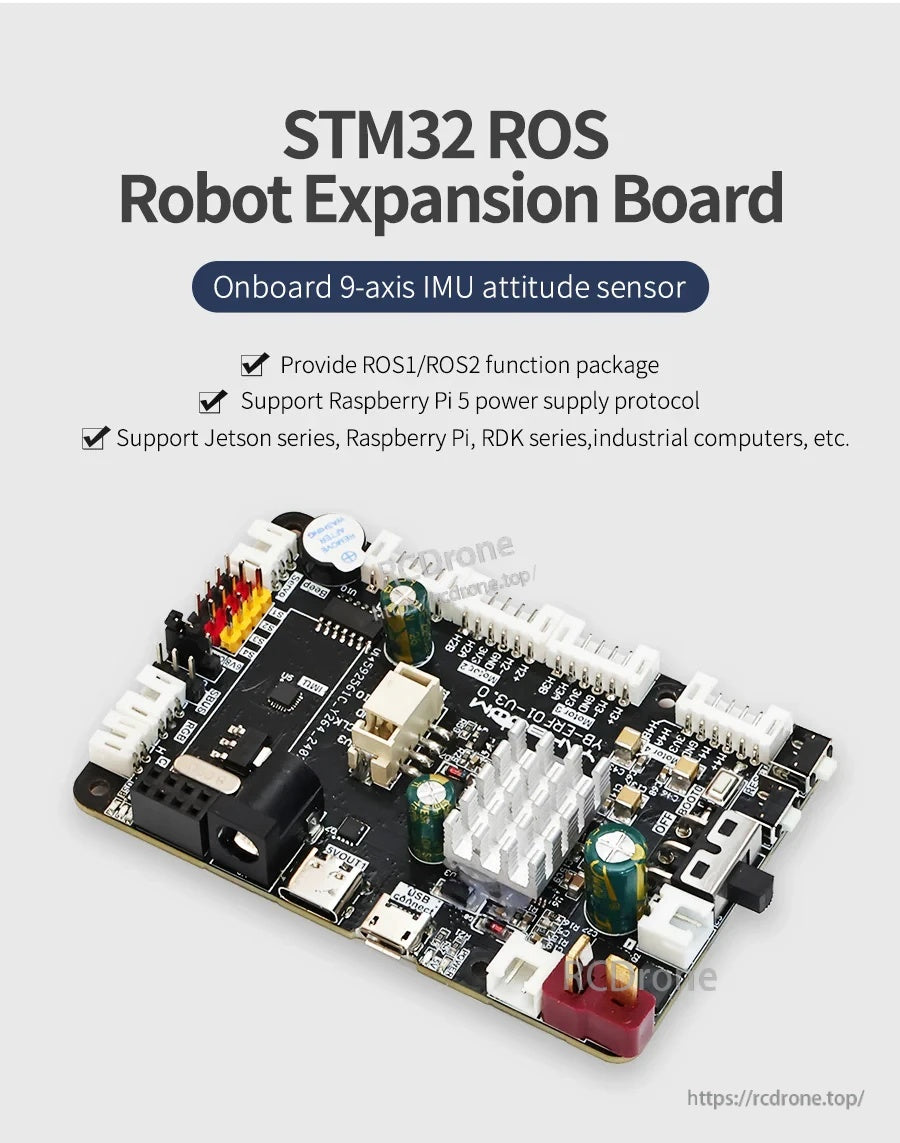
- Stöder ROS1 och ROS2; tillhandahåller ROS1/ROS2 funktionspaket och SDK:er för båda systemen (enligt tillverkaren).
- Inbyggd 9-axlig IMU hållningssensor (V3.0 uppgradering använder ICM20948-lösningen).
- STM32 kärnkontrollenhet med STM32F103RCT6 MCU.
- Motorstyrning: 4-kanals motorgränssnitt, stödjer 4-kanals encoder-motorer och stödjer 4-kanals encoder hastighetsavläsning; PID kan användas för motorhastighetskontroll (som angivet).
- Servostyrning: 4-kanals PWM servogränssnitt; stödjer seriell bussservo. Det enskilda kanals seriella bussservogränssnittet stödjer kaskadkoppling av upp till 6 seriella bussservon (som angivet).
- Kommunikationsmetoder: USB seriell kommunikation, CAN-buss kommunikation, SBUS-buss kommunikation.
- Köruppbyggnadsstöd (som angivet): 2-hjulsdrift, 4-hjulsdrift, Mecanum-hjul, Ackerman-styrning.
- Skydd (som angivet): kortslutningsskydd, överströmskydd, omvänd anslutningsskydd.
Specifikationer
| Produkt | ROS robotkontrollkort / STM32 ROS robotexpansionskort |
| Version | V3.0 |
| Styrelse märkning | YB-ERF01-V3.0 |
| MCU-modell | STM32F103RCT6 |
| MCU-kärna | Cortex M3 R1P1 |
| GPIO mängd | 51 |
| Gränssnitt resurser (MCU) | 2 x SPI, 3 x USART, 2 x I2C, 2 x I2S, 1 x CAN, 51 x I/O, 2 x DAC |
| Tidtagare | 8 |
| Intern Flash | 256KB |
| SRAM | 48KB |
| Spänningsområde | Extern spänning: 2.0-3.6V; Kärnspänning: 1.8V |
| Pin paket | LQFP64 |
| Kompletteringsverktyg | KEIL MDK, STM32CubeMX etc. |
| IMU | 9-axlig IMU attityd sensor (V3.0: ICM20948-lösning) |
| IMU I2C kommunikationshastighet | 100kHz |
| IMU dataläsningshastighet | 100Hz |
| Antal sensoraxlar | 9Axlar |
| Motorgränssnitt | 4-kanals motorgränssnitt; stödjer 4-kanals encoder motorer; 4-kanals encoder hastighetsavläsning |
| Servogränssnitt | 4-kanals PWM servogränssnitt; enkelkanals seriell buss servogränssnitt (stödjer kaskad upp till 6PCS seriella buss servon) |
| Kommunikation | USB seriell kommunikation; CAN-buss kommunikation; SBUS-buss kommunikation |
| Ingångsspänning | 12V |
| Effektutgång (som visas) | 5.1V/5A strömförsörjning till Raspberry Pi 5 (Raspberry Pi 5 strömförsörjningsprotokoll) |
| USB perifera strömnotering (som angivet) | När Raspberry Pi 5 upptäcker det exklusiva strömförsörjningsprotokollet ökar den perifera USB-strömmen till 1.6A; annars är den begränsad till 0.6A |
| Strömförsörjningsgränssnittets utgång (som visas) | Jetson Nano B01 (5V); Raspberry Pi 5 / RDK-serien (5V); Strömförsörjning för externa enheter (12V); Jetson Xavier NX / Jetson Orin Nano / Jetson Orin NX (12V) |
| Lastströmsbegränsningsnotering (som angivet) | När du använder DC5.5*2.1 gränssnitt och Type-C-gränssnitt 5V utgångsströmförsörjning samtidigt, den totala belastningsströmmen får inte överstiga 5A |
Tillämpningar
- ROS robotbil drivrutin/expansionskort för mobila robotar
- Encoder motor + PID hastighetskontrollprojekt (4-kanal)
- Servo och seriell buss servo kontroll för robotstyrning, panorering/tilt, och aktuatorer
- CAN / USB seriell / SBUS integration för robotik kontrollsystem
- Raspberry Pi 5, Jetson-serien, RDK-serien (RDK X3) robotkontroller expansioner
Manualer
Handledningar: http://www.yahboom.net/study/ROS-Driver-Board
För kompatibilitet, kablage och projektintegrationsfrågor, kontakta https://rcdrone.top/ eller e-posta [email protected].
Detaljer

Bygg ROS robotbilar och mobila robotar över vanliga chassistyper, från små rovers till flerbenta plattformar.
En enda kontrollkort kombinerar STM32 kärnkontrollern och en 9-axlig IMU för rörelse- och attitydsensorering i ROS-projekt.
V3.0-revisionen uppdaterar hårdvaruplattformen samtidigt som den behåller en kompakt layout för stapling med värddatorer.

Motor-, servo- och kommunikationsgränssnitt stöds tillsammans med inbyggda skydd såsom omvänd anslutning och överströmskydd.
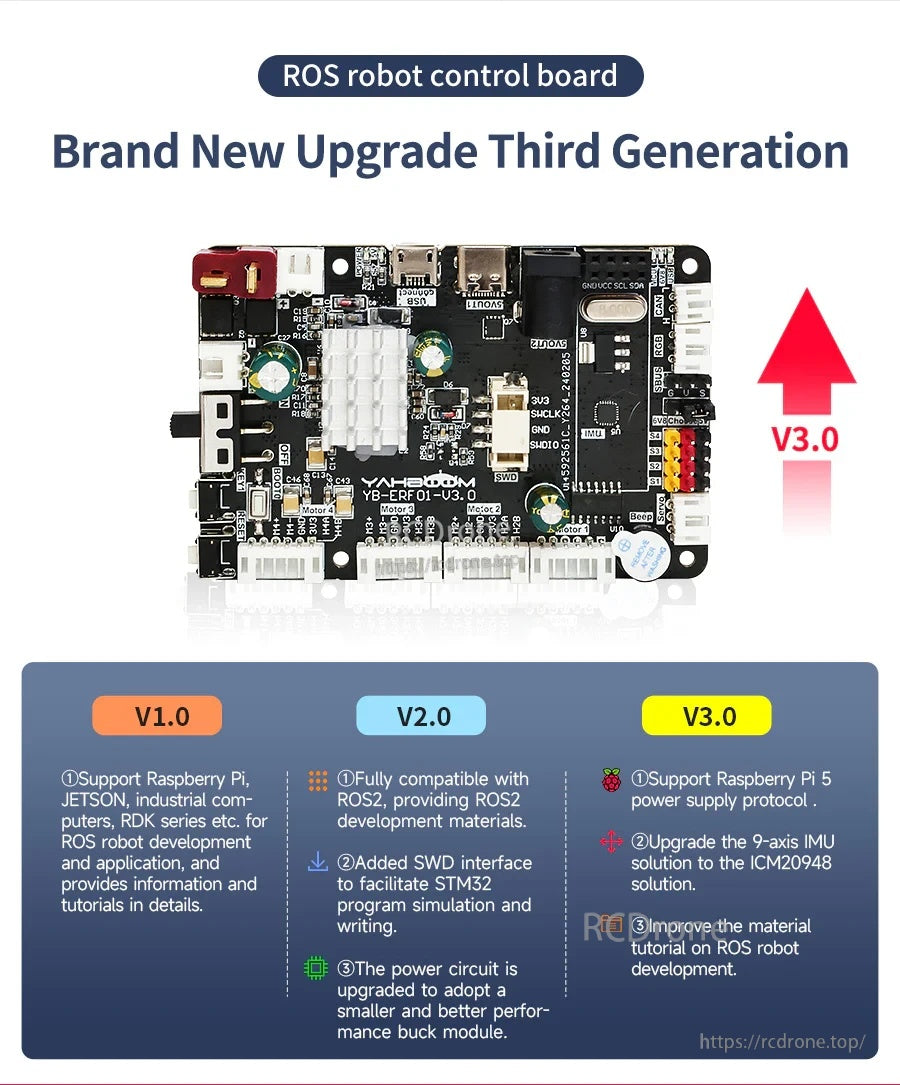
Versionsjämförelse detaljerar det tillagda Raspberry Pi 5 strömprotokollstödet och den uppgraderade 9-axliga IMU-lösningen i V3.0.
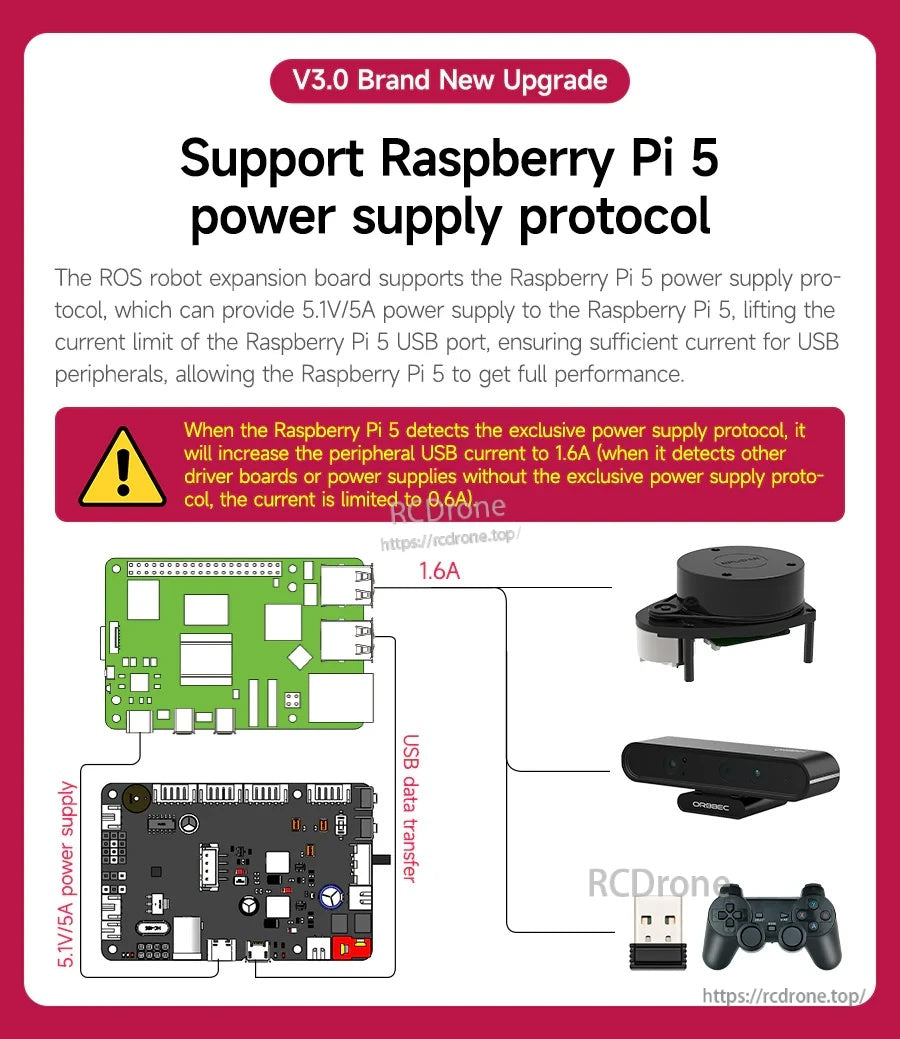
Raspberry Pi 5 strömkooperation hjälper till att leverera stabil ström till USB-periferiutrustning när den används med det kompatibla strömprotokollet.
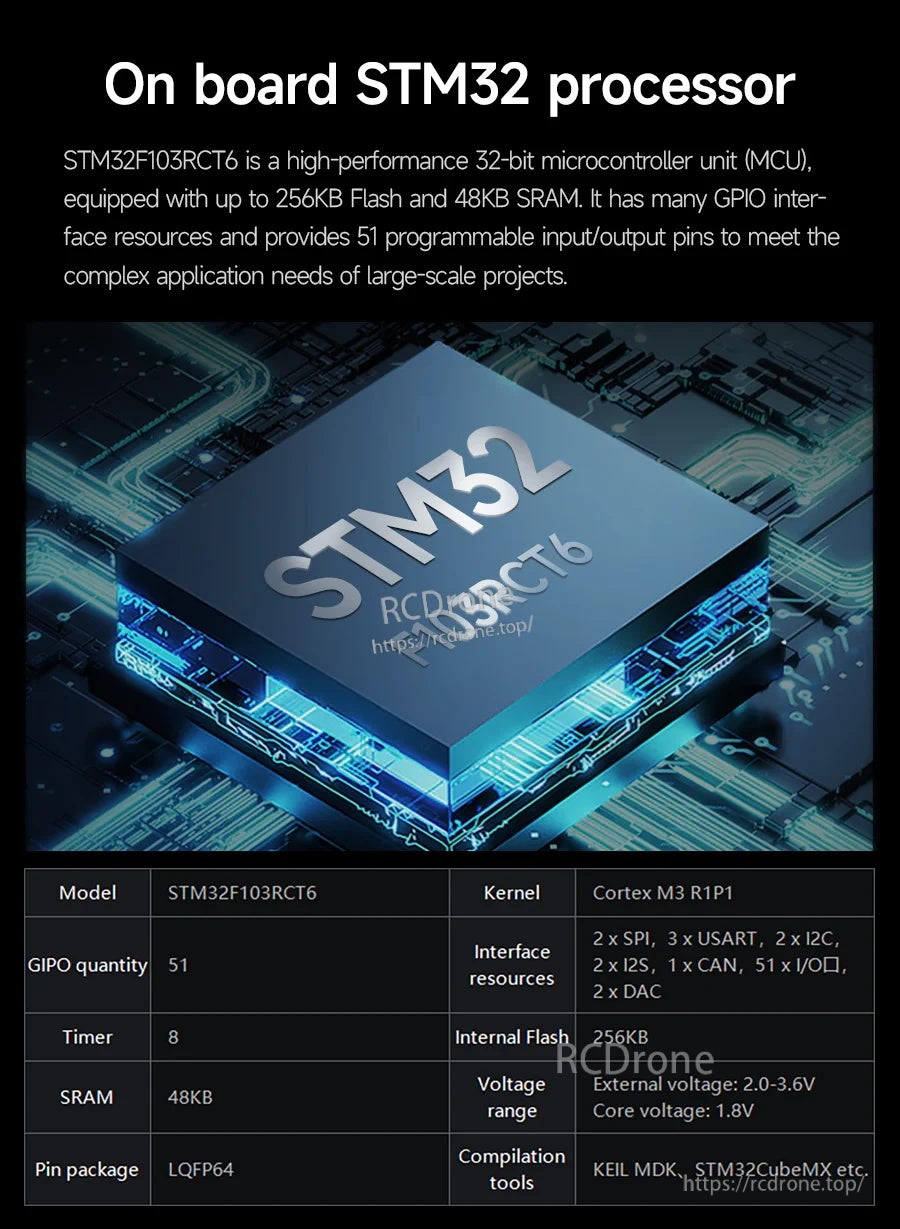
Det inbyggda STM32F103RCT6 erbjuder gott om GPIO och vanliga bussar för robotikstyrning och periferiutvidgning.
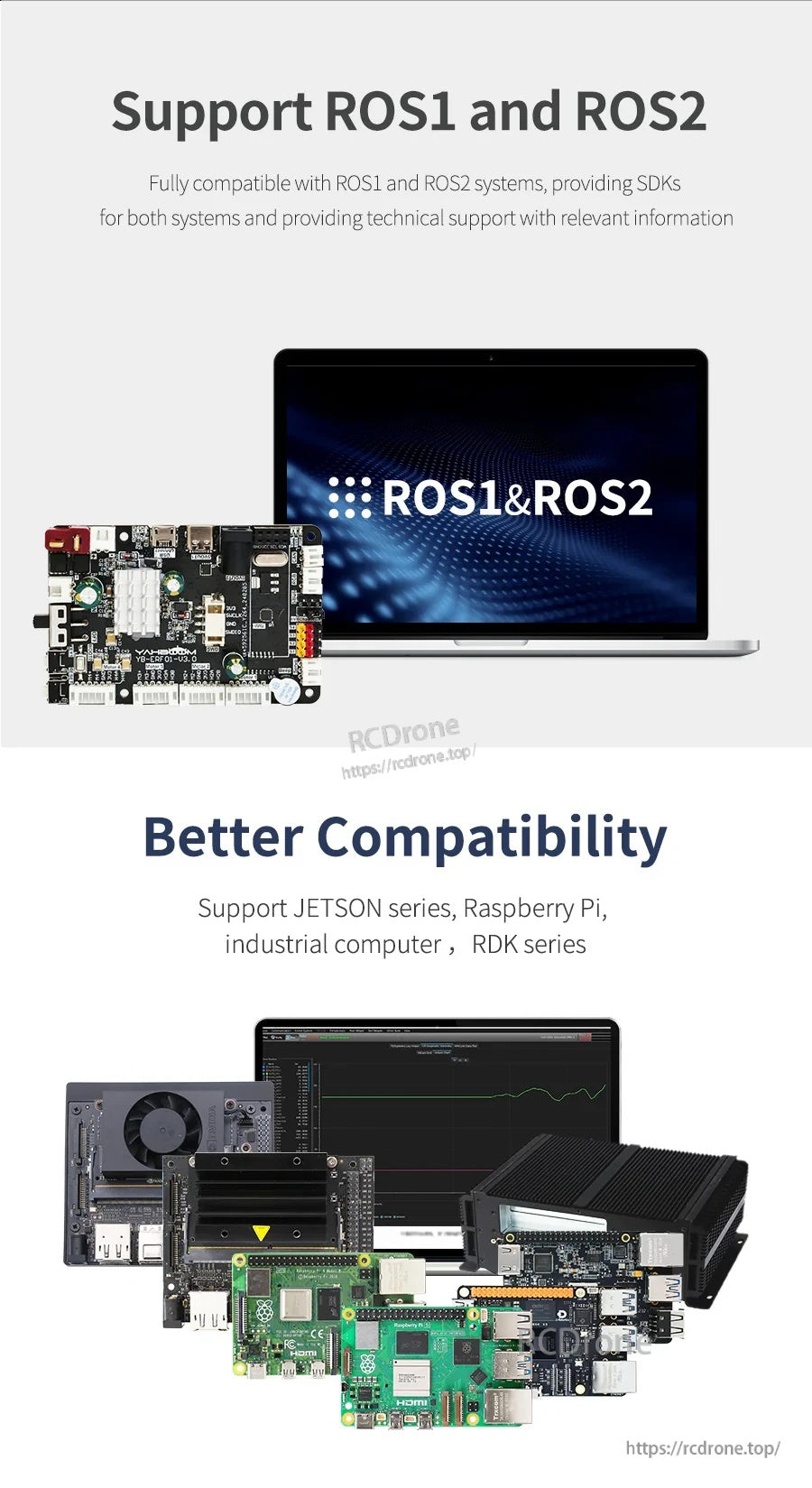
ROS1 och ROS2 utveckling stöds över populära värdar såsom Raspberry Pi, Jetson och RDK-serien kort.

Exempel på stapling och kablage visar hur kortet ansluter för ström och data med Raspberry Pi och Jetson-plattformar.
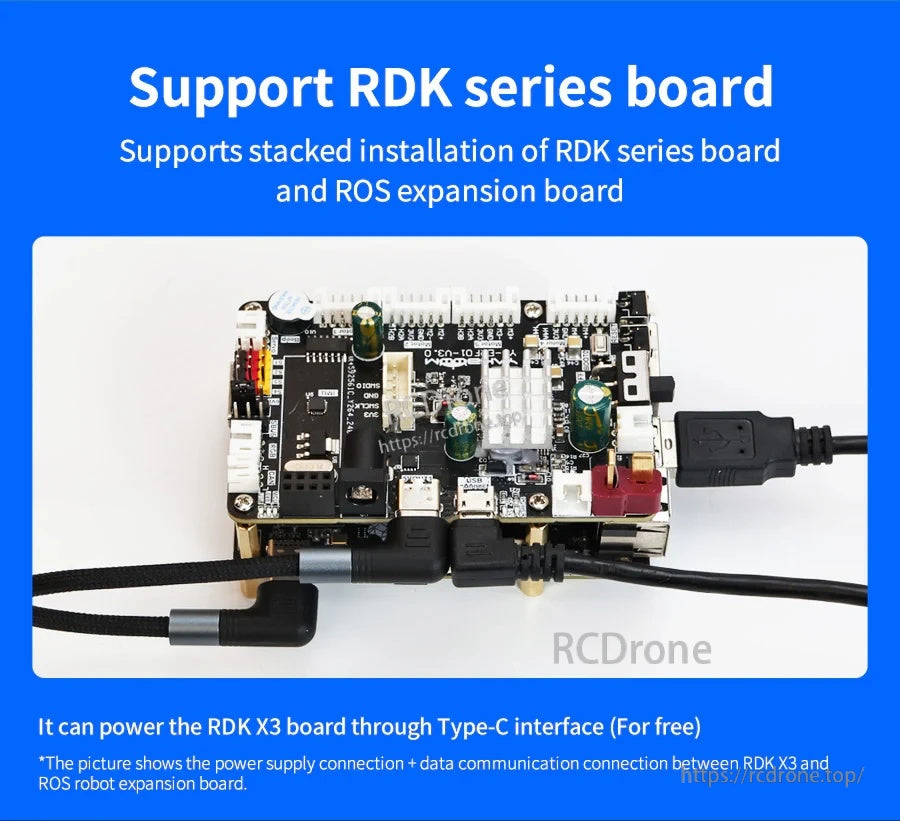
RDK-seriens integration inkluderar staplad montering och Type‑C-anslutningsalternativ för ström och kommunikation.
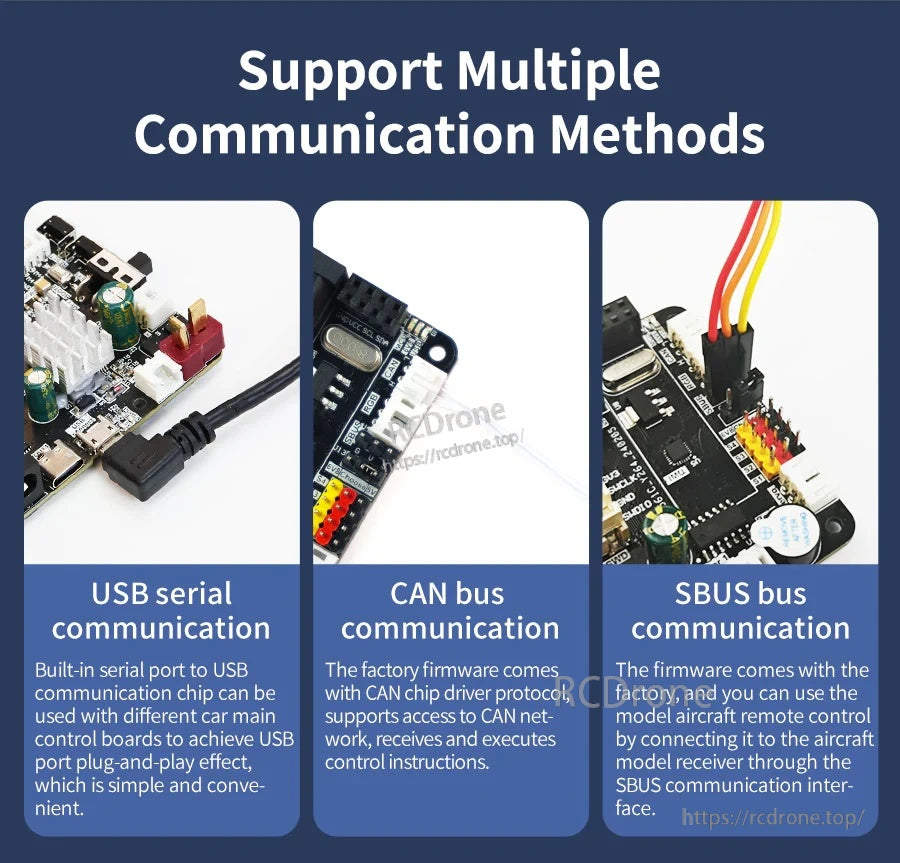
Välj mellan USB-seriell, CAN-buss eller SBUS för att matcha kontroll- och telemetribehoven för din robotplattform.
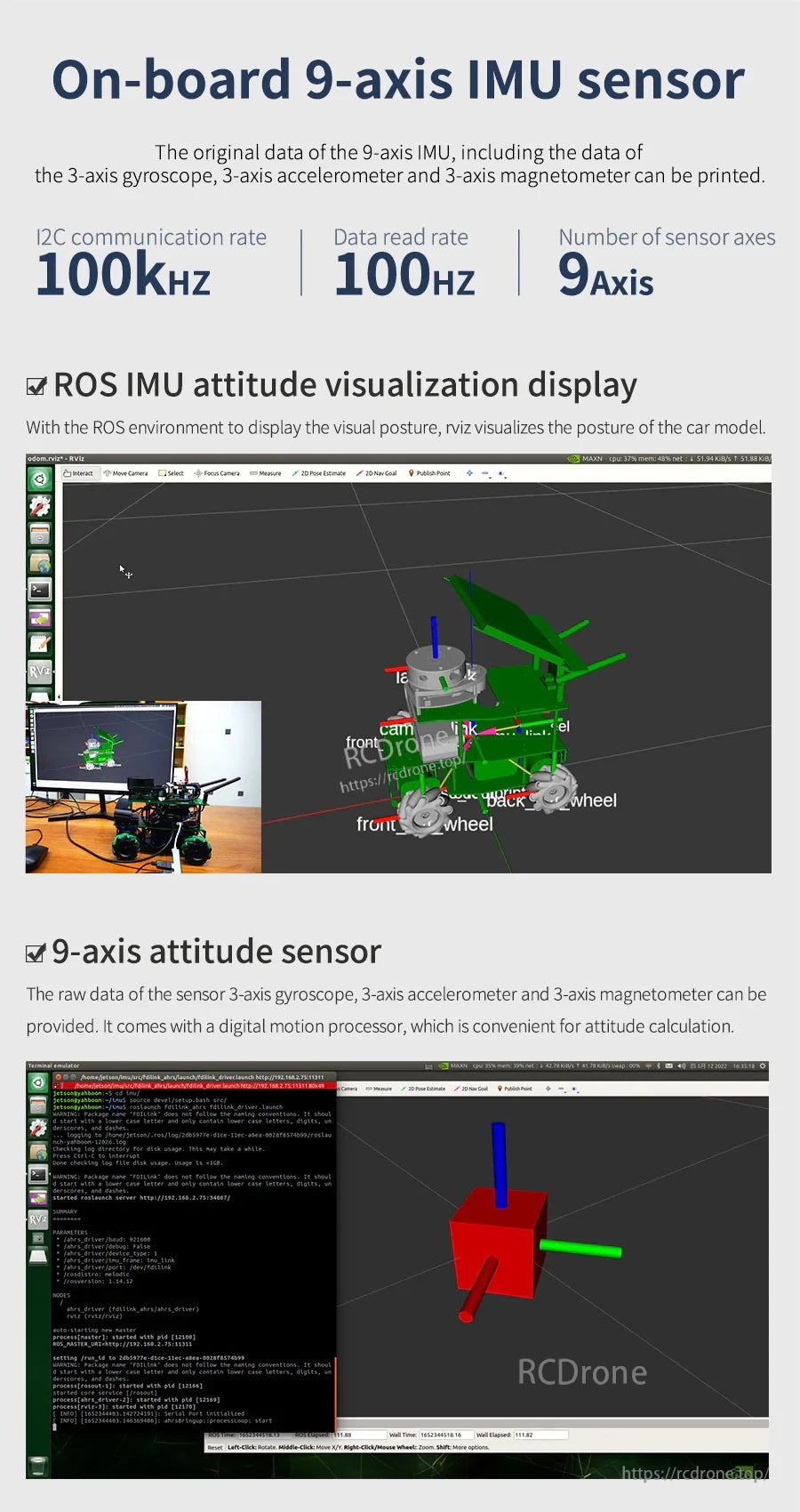
IMU-data kan användas för att uppskatta och visualisera attityd i ROS under navigering och rörelsekontroll.
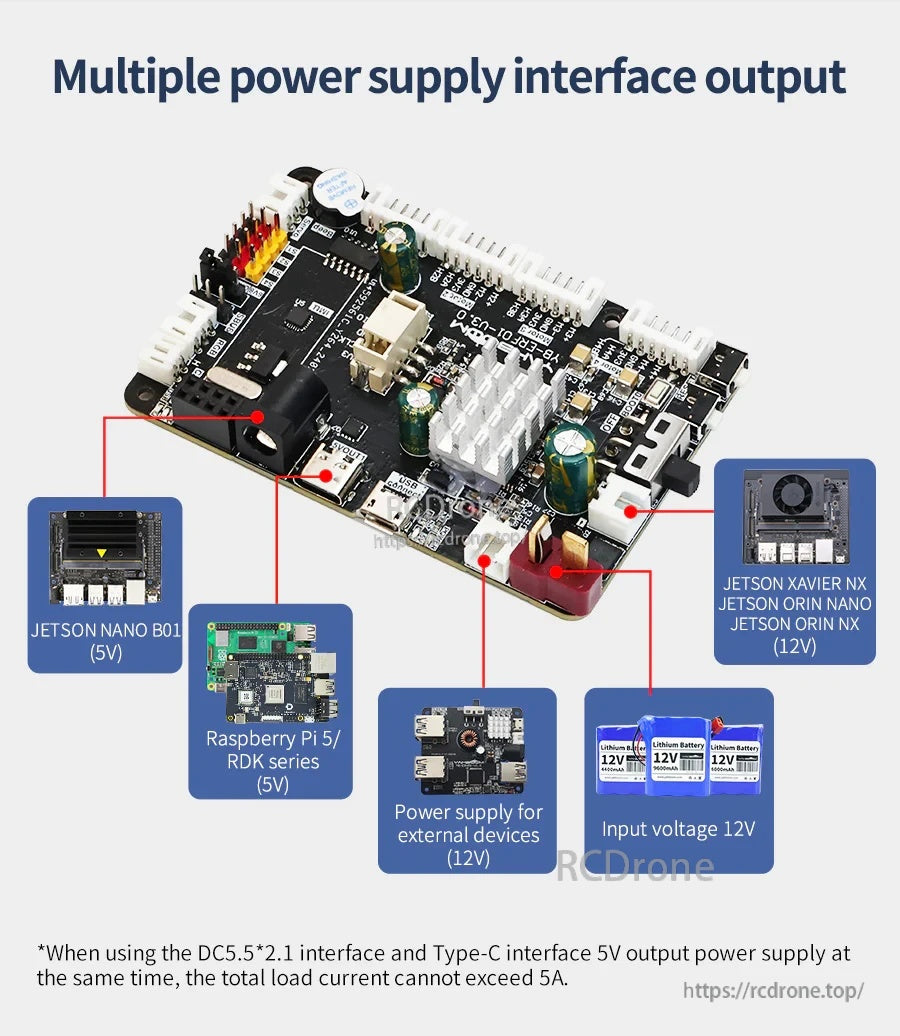
Flera strömutgångar förenklar kablage för 5V värdkort och 12V perifera enheter medan en 12V huvudingång används.

Driv upp till fyra encodermotorer och kontrollera PWM- eller seriell bussservon för styrning, armar och andra aktuatorer.

Passar vanliga mobila basdesigns inklusive differentialdrift, mecanum och Ackerman-styrningslayouter.
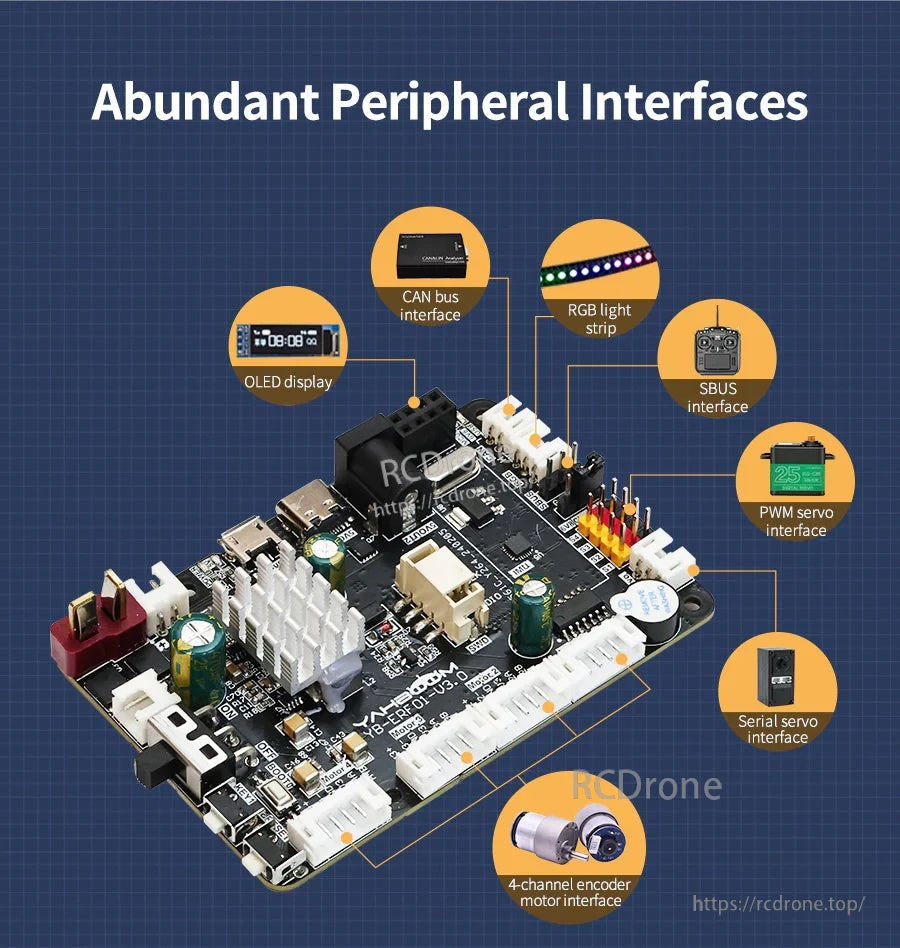
Rika ombordgränssnitt gör det enklare att lägga till skärmar, belysning och kontrollbussar utan extra adapterkort.



Valfria 15KG, 20KG och 25KG styrservon finns tillgängliga för installationer som behöver högre vridmoment.

En 15KG seriell buss smart servoalternativ finns tillgängligt för byggen som behöver högre vridmomentaktivering.


Valfria RGB-ljusslingor finns tillgängliga för att lägga till färgglad belysning till din installation.

YB-ERF01 V3.0 kontrollkortet integrerar omvänd polaritet, kortslutnings- och överströmskydd med dubbel nedtrappning av strömreglering för stabil systemkraft.

Yahboom YB-ERF01 V3.0 används i en rad byggen, inklusive ROS-robotbilar, multifunktionella kompositrobotar, Ackerman-racingbilar och självkörande robotbilar.
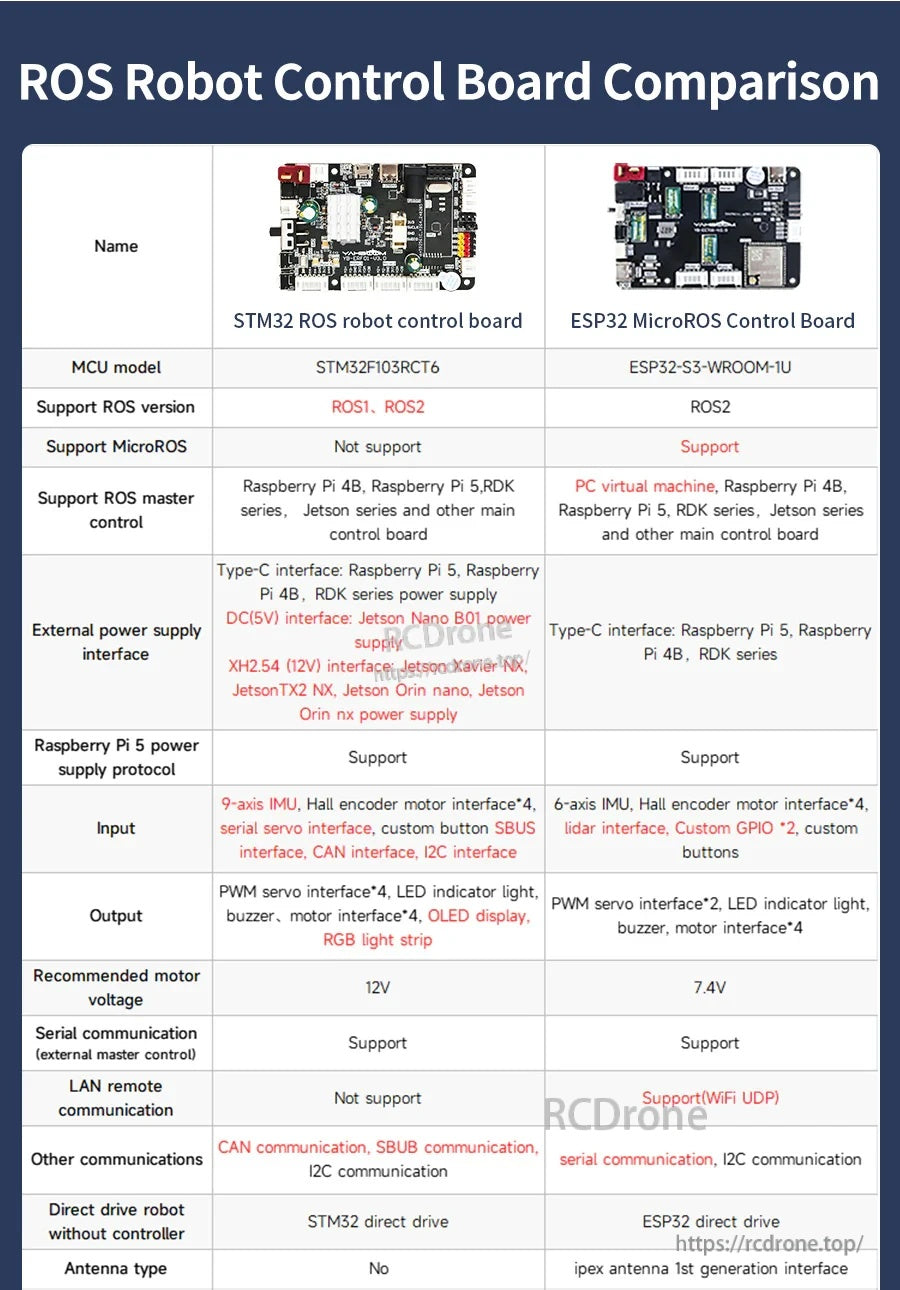
Jämförelsen av ROS robotkontrollkortet beskriver viktiga skillnader mellan STM32F103RCT6 och ESP32-S3 alternativ, inklusive stöd för ROS-versioner och tillgängliga gränssnitt.

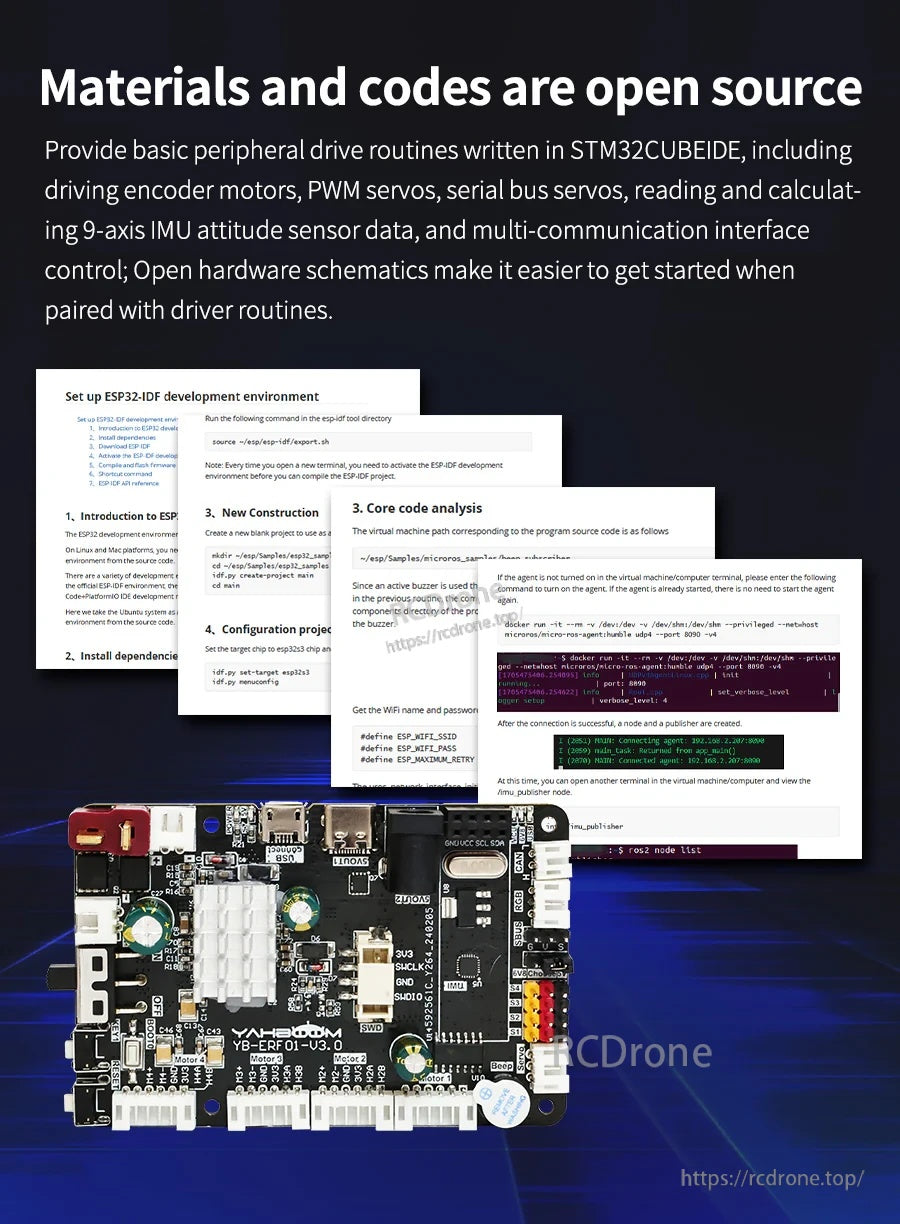
Yahboom YB-ERF01 V3.0 kontrollkortet levereras med öppen källkodsmaterial och drivrutiner för vanliga robotperifera enheter som motorer, PWM-servon och sensorer.

Yahboom tillhandahåller en handledningslänk samt nedladdningsbara STM32-drivrutiner och ROS1/ROS2-paket för att stödja installation och utveckling.
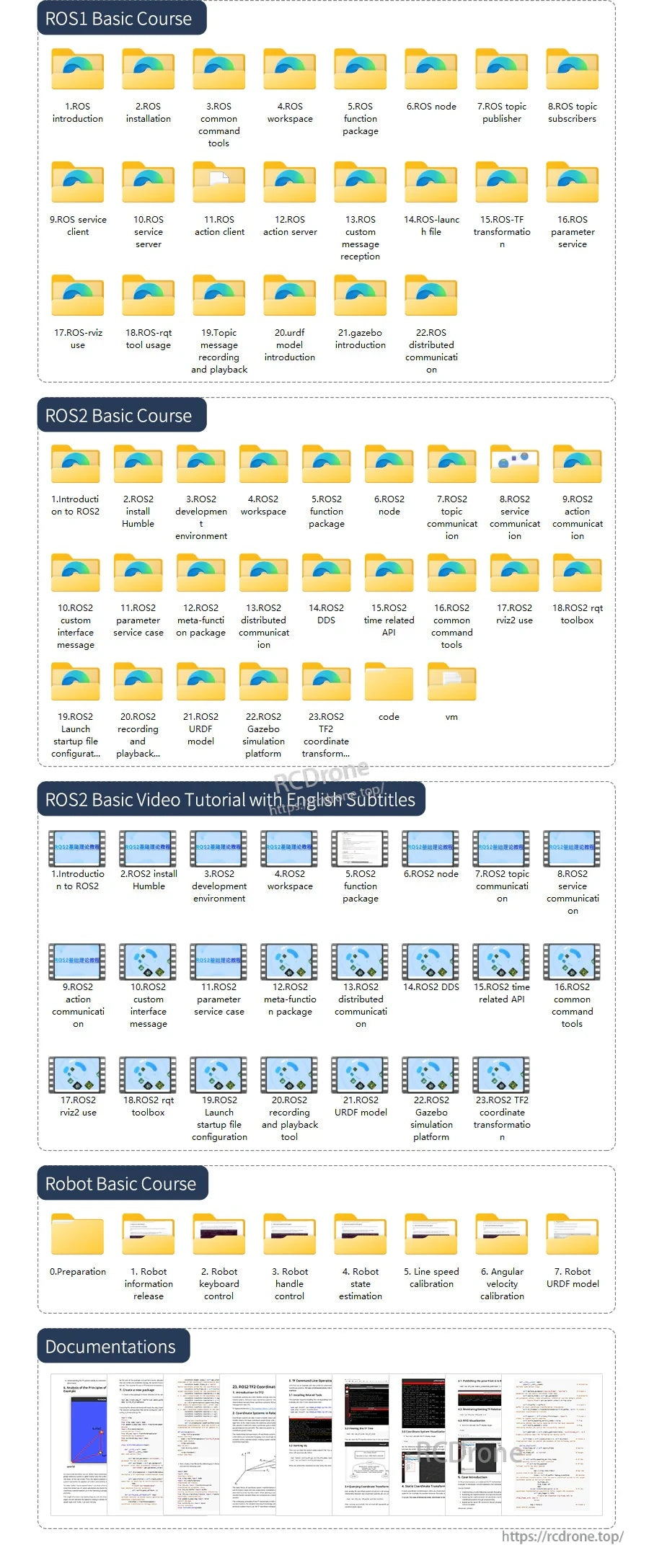
Yahbooms samlade resurser inkluderar ROS1 och ROS2 grundkursmappar, videohandledningar med engelska undertexter och stödjande dokumentation för installation och lärande.
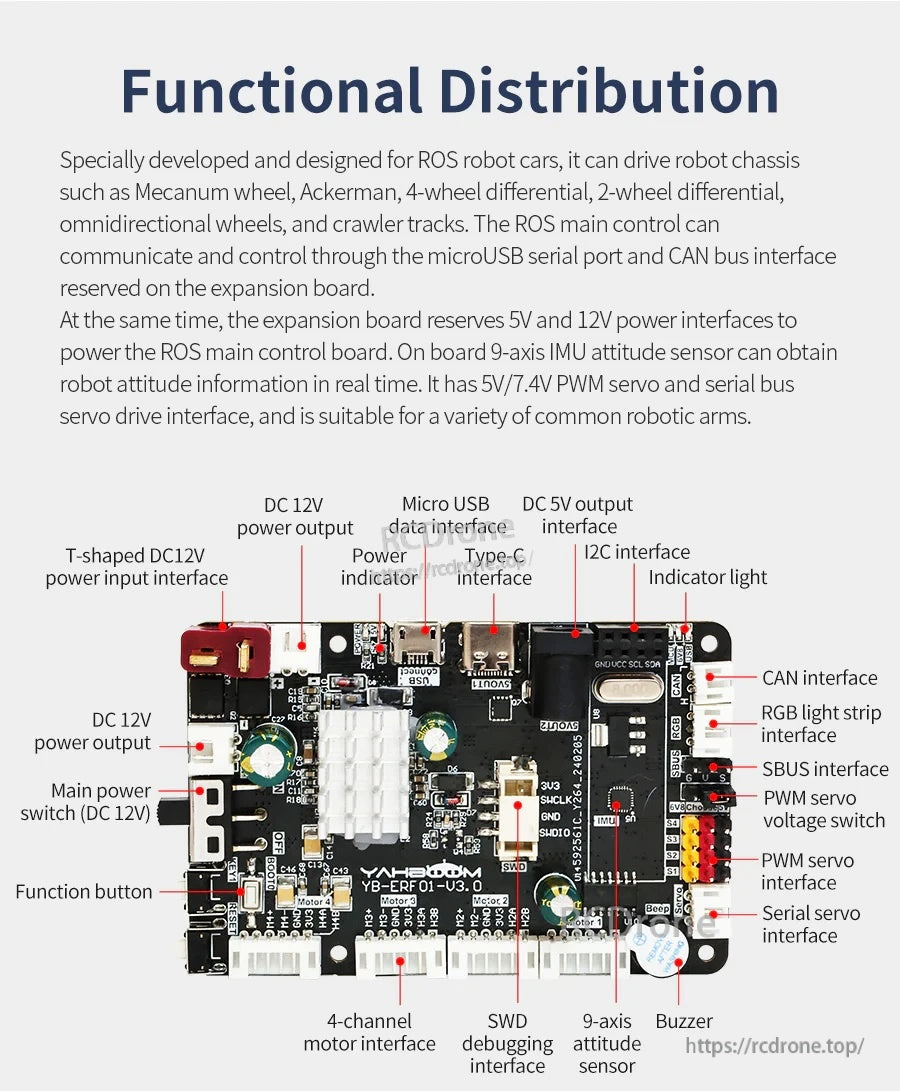
YB-ERF01 V3.0 kontrollkortet erbjuder märkta anslutningar för 12V/5V ström, USB-data, CAN, I2C, motorutgångar och servo-gränssnitt för att förenkla kableringen av ROS-robotar.
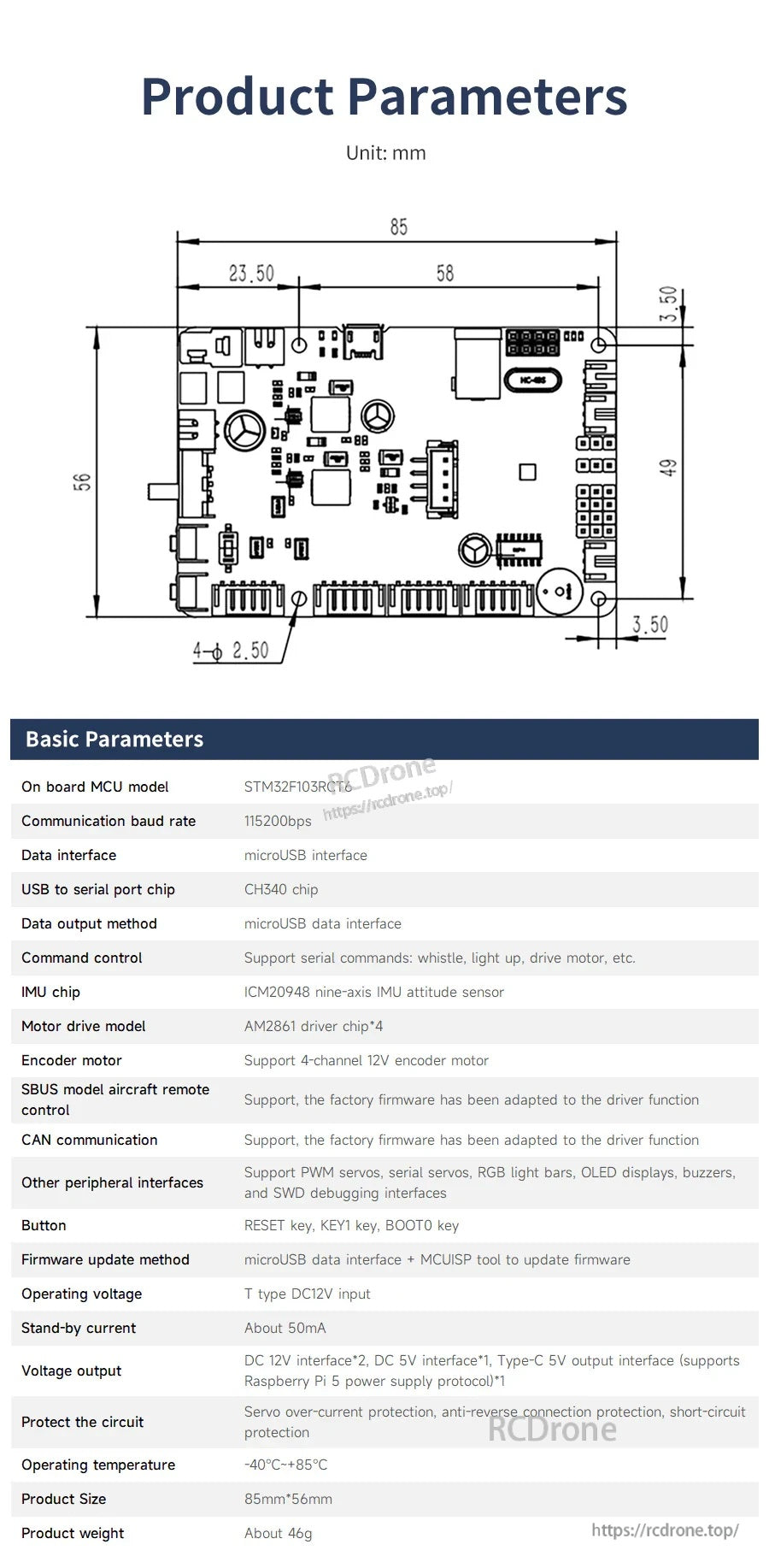
YB-ERF01 V3.0 ROS robotkontrollkortet använder en STM32F103RCT6 MCU och en kompakt 85×56 mm fotavtryck för prydlig integration med kompatibla Raspberry Pi- och Jetson-installationer.
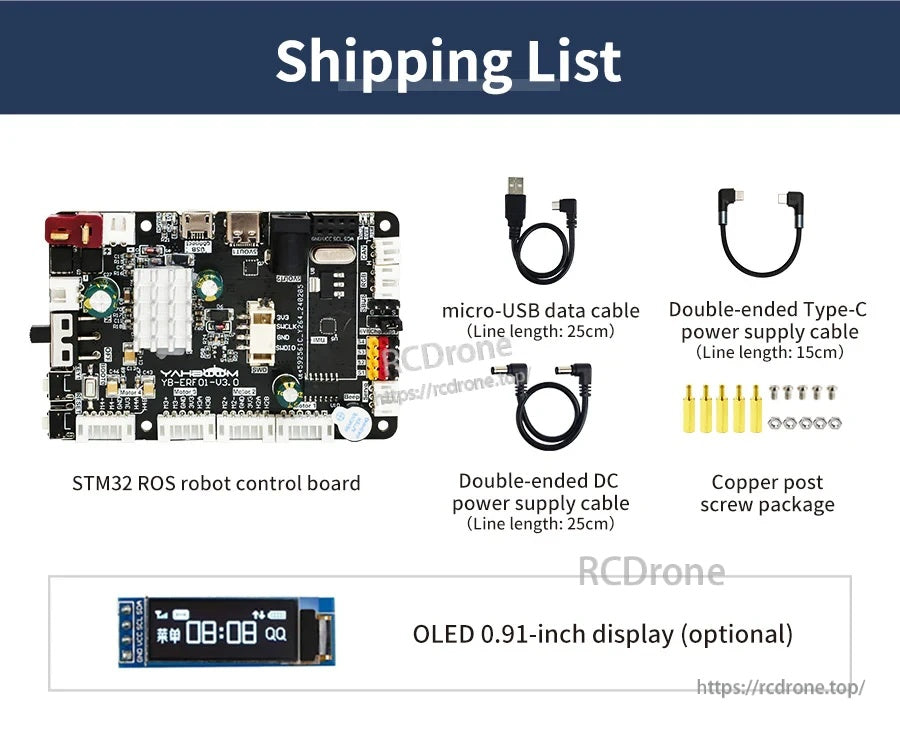
STM32 ROS robotkontrollkortets kit inkluderar en micro-USB datakabel, Type‑C strömkabel, DC strömkabel, skruvposter och en valfri 0,91-tums OLED-skärm.
Related Collections