












Yahboom ROSMASTER M1 ROS2 Robot för SLAM & AI, Mecanumdrift, Jetson Nano/Orin Nano SUPER/RPi 5/RDK X5
Yahboom ROSMASTER M1 ROS2 Robot för SLAM & AI, Mecanumdrift, Jetson Nano/Orin Nano SUPER/RPi 5/RDK X5
Yahboom
Det gick inte att ladda hämtningstillgänglighet
Översikt
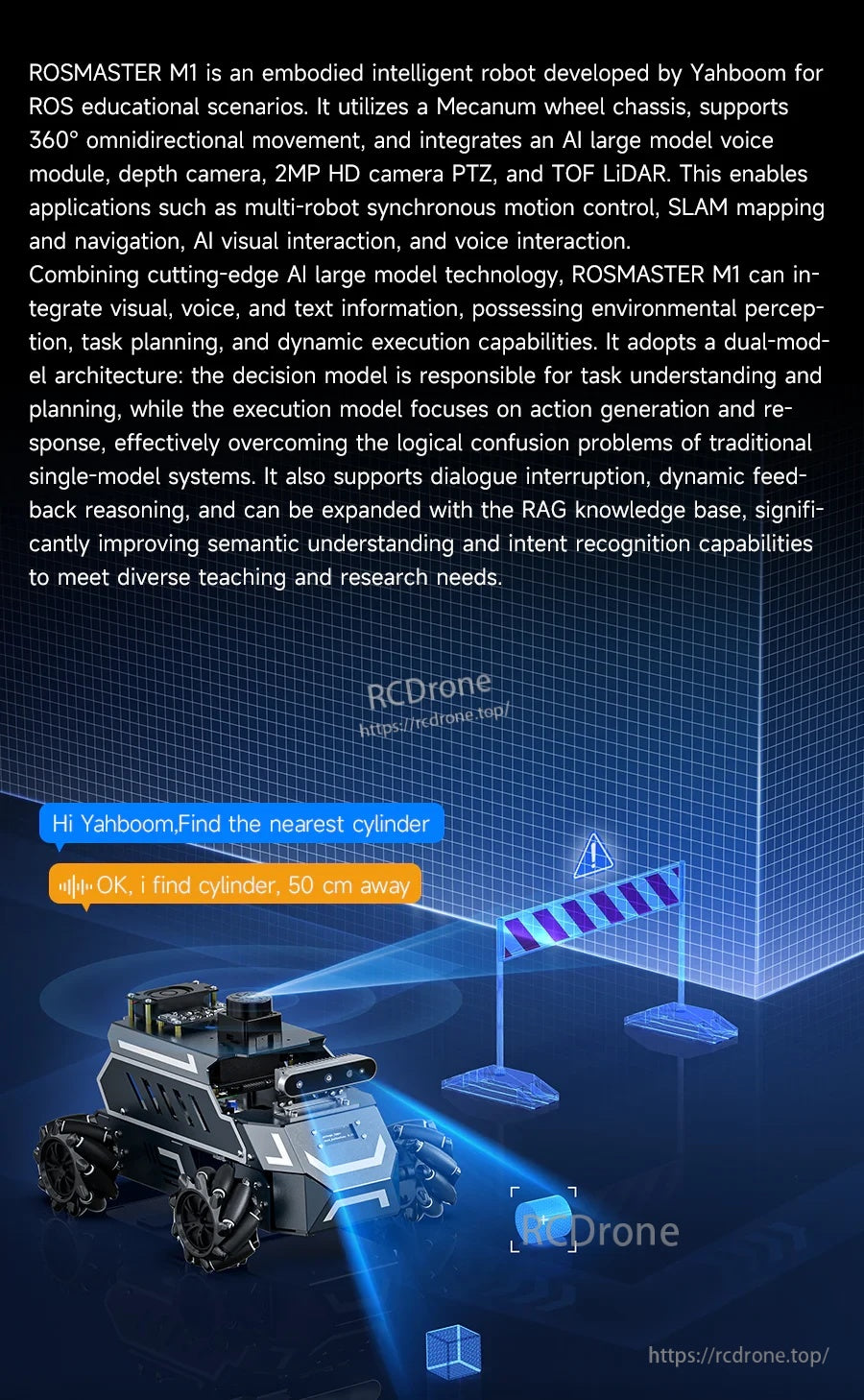
Yahboom ROSMASTER M1 är en AI-stor modell ROS2-robot för robotikundervisning, ROS-forskning och AI-multimodala interaktionsexperiment. Den använder ett Mecanum-hjulschassi för 360° omnidirektionell rörelse (lateralt, diagonalt, rotation på plats) och stöder ROS2 HUMBLE på flera huvudkontrollplattformar inklusive Raspberry Pi 5, RDK X5, Jetson Nano 4GB, Jetson Orin Nano 8G, och listar även Jetson Orin Nano SUPER och Jetson Nano B01.
Roboten integrerar multimodal perceptionshårdvara (3D-djupkamera, 2MP HD-kamera PTZ, TOF LiDAR och en AI-stor modell röstmodul) för att stödja SLAM-kartläggning/navigering, visuell igenkänning, vägplanering och multimodal interaktion. Den antar en dubbelmodell inferensarkitektur med ett beslutslager (uppgiftsförståelse/planering) och ett exekveringslager (aktionsgenerering/svar), och stöder dialogavbrott, dynamisk återkopplingsresonemang och valfri expansion med en RAG-kunskapsbas.
Viktiga funktioner
- Mecanum omnidirektionellt drivchassi med 360° omnidirektionell rörelse
- Högvridmoment 520 encoder metallmotorer (x4)
- Multi-master plattformskompatibilitet: Raspberry Pi 5, RDK X5, Jetson Nano 4GB, Jetson Orin Nano 8G (även listade: Jetson Orin Nano SUPER, Jetson Nano B01)
- ROS2 HUMBLE kompatibel
- Multi-sensor fusion perception: 3D djupkamera, 2MP HD-kamera PTZ, TOF LiDAR, AI stor modell röstmodul + högtalare
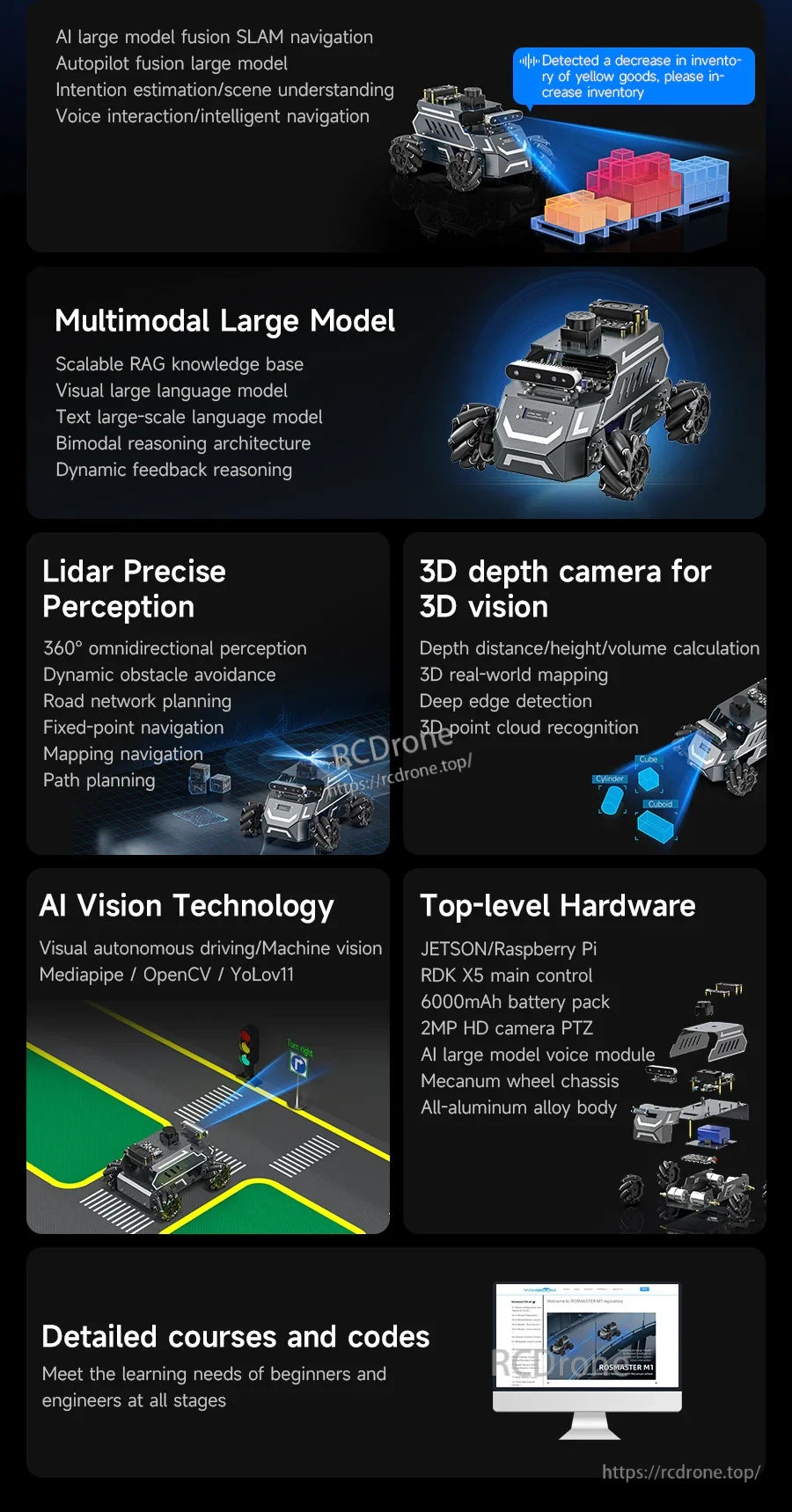
- Multimodal stora modellkapaciteter: skalbar RAG kunskapsbas, visuell stor språkmodell, text storskalig språkmodell, bimodal resonemangsarkitektur, dynamisk feedbackresonemang
- LiDAR exakt uppfattning: 360° allsidig uppfattning, dynamisk hinderundvikelse, fastpunktsnavigering, kartläggningsnavigering, vägplanering, vägnätsplanering
- 3D djupseendefunktioner: djupavstånd/höjd/volymberäkning, 3D-kartläggning av verkliga världen, djupkantdetektering, 3D-punktmolnigenkänning
- AI visionsstack listad: MediaPipe, OpenCV, YOLOv11
- Lärresurser: detaljerade kurser och koder; handledningar och videohandledningar med engelska undertexter
Specifikationer
| Modell | ROSMASTER M1 |
| Robottype | AI stor modell ROS2 robot (mecanum-hjul mobil robot) |
| ROS version | ROS2 HUMBLE |
| Chassi | Mecanum hjulchassi |
| Motorer | 520 högvridmoment encoder metallmotor x4 |
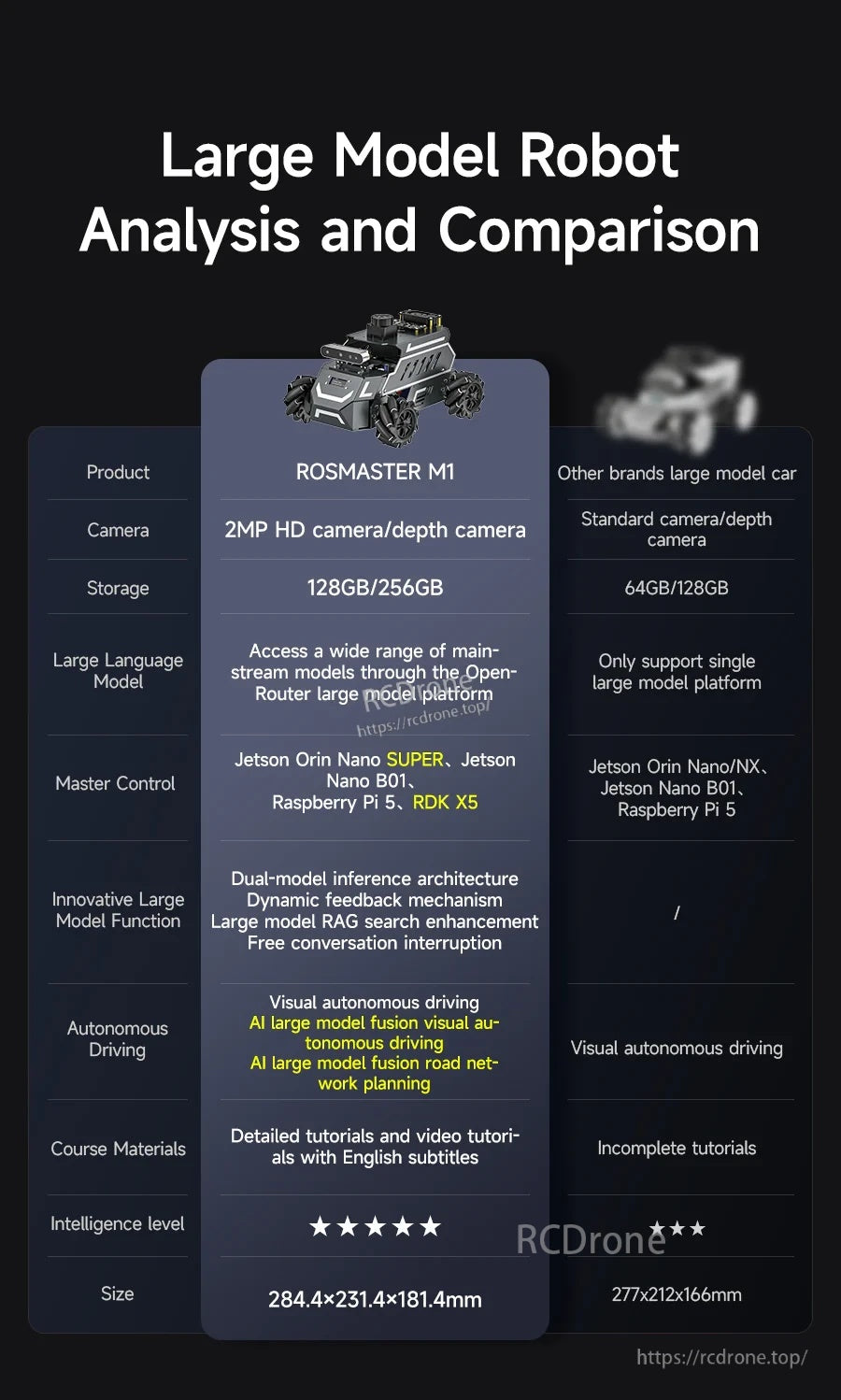
| Kameror | 2MP HD-kamera PTZ; 3D djupkamera (även listad som "2MP HD-kamera/djupkamera") |
| LiDAR | TOF högpresterande LiDAR |
| Röst | AI stor modell röstmodul + högtalare |
| Batteripaket | 12V 6000mAh högkapacitets batteripaket |
| Lagring | 128GB / 256GB |
| Chassi | Helaluminiumlegeringschassi |
| Huvudkontrollplattformar (listade) | Raspberry Pi 5; RDK X5; Jetson Nano 4GB; Jetson Orin Nano 8G; Jetson Orin Nano SUPER; Jetson Nano B01 |
| Mått | 284.4 x 231.4 x 181.4 mm |
Användningsområden
- SLAM-kartläggning och navigering; SLAM intelligent multi-punktsnavigering; SLAM kartobjektsökning
- AI visuell igenkänning och visuell interaktion; scenförståelse
- Vägplanering; fastpunktsnavigering; dynamisk hinderundvikning
- Röstinteraktion och avsiktsinferens; multimodala interaktionsexperiment
- Visuell spårning/följning; linjespårning (“autonom kryssning”)
- Multi-robot synkron rörelsekontroll (som listat)
Funktionsanteckningar: Vägverksplanering anges som ej stödd på Raspberry Pi och Jetson Nano B01 versioner. Spårkarta vägskyltigenkänning / spårkarta navigeringsfunktioner anges som kräver en separat spårkarta, och Raspberry Pi versioner anges som ej stödjer dessa spårkartfunktioner.
För förhandskontroller av kompatibilitet (masterkontrollplattform, lagringsalternativ och funktionsstöd), kontakta [email protected] or besök https://rcdrone.top/ .
Manualer
Handledning
Yahboom ROSMASTER M1 Handledning
Videor
Detaljer

ROSMASTER M1 är en ROS2 HUMBLE mobil robot byggd för AI och robotikutbildning med 360° mekanumhjulsmobilitet.
Multimodal perception (kamera, djup, LiDAR och röst) stöder SLAM-kartläggning, navigering och interaktiva experiment.
En snabb funktionskarta över plattformens kärnkapaciteter: multimodal resonemang, LiDAR-navigering, djupseende och AI-visionverktyg.

Designad för ROS-utvecklare som vill ha en robot med förkroppsligad intelligens som är lätt att lära ut, testa och utöka.
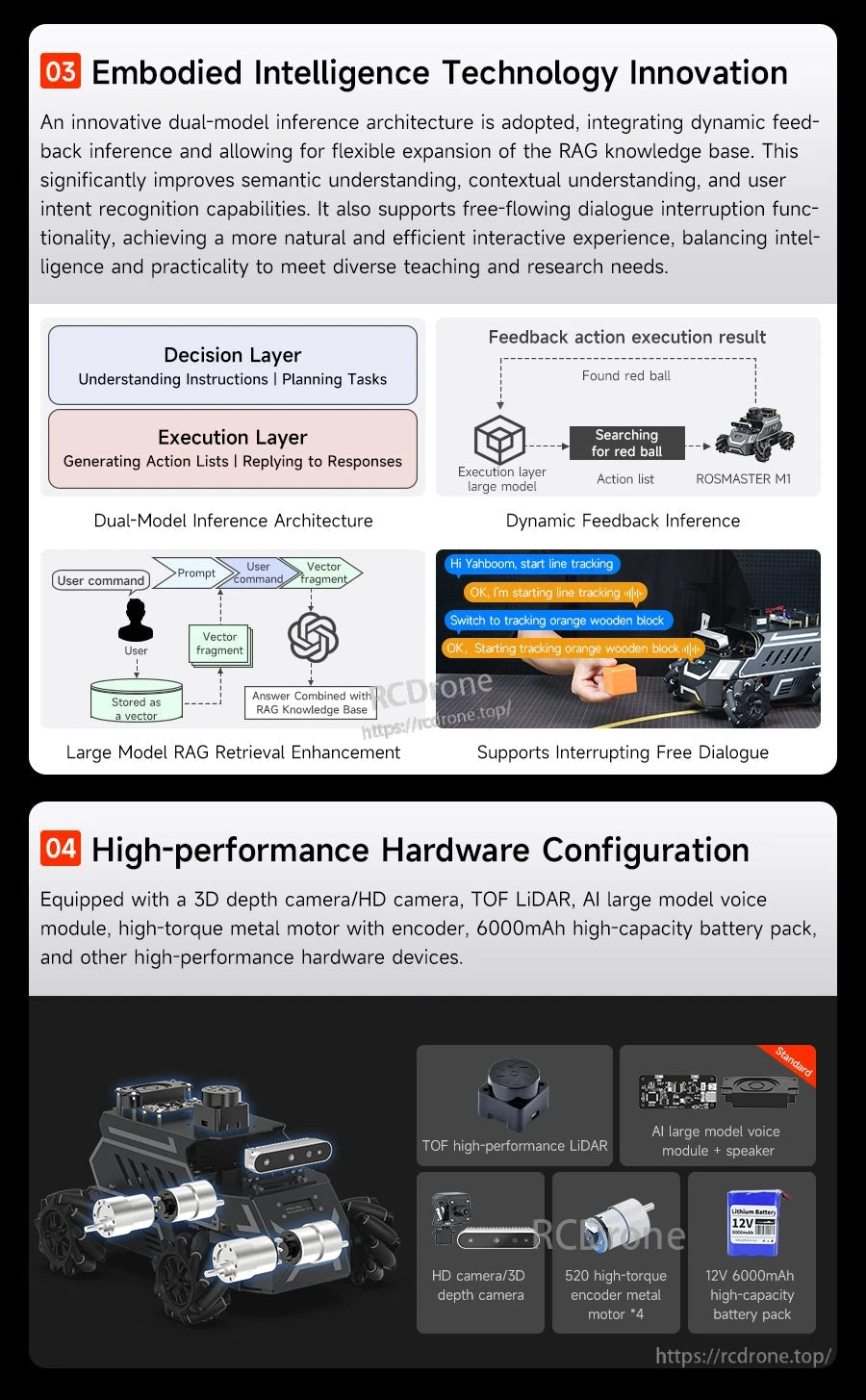
En tvålagers pipeline separerar uppgiftsförståelse från utförande av åtgärder, med dynamisk feedback och stöd för avbrott.
Plattformsalternativ och läromaterial är beskrivna för att hjälpa till att välja rätt konfiguration för ditt labb eller klassrum.

Kör LLM-stil uppgifter som Q&A, textgenerering, röstinteraktion och visuella förståelsearbetsflöden.
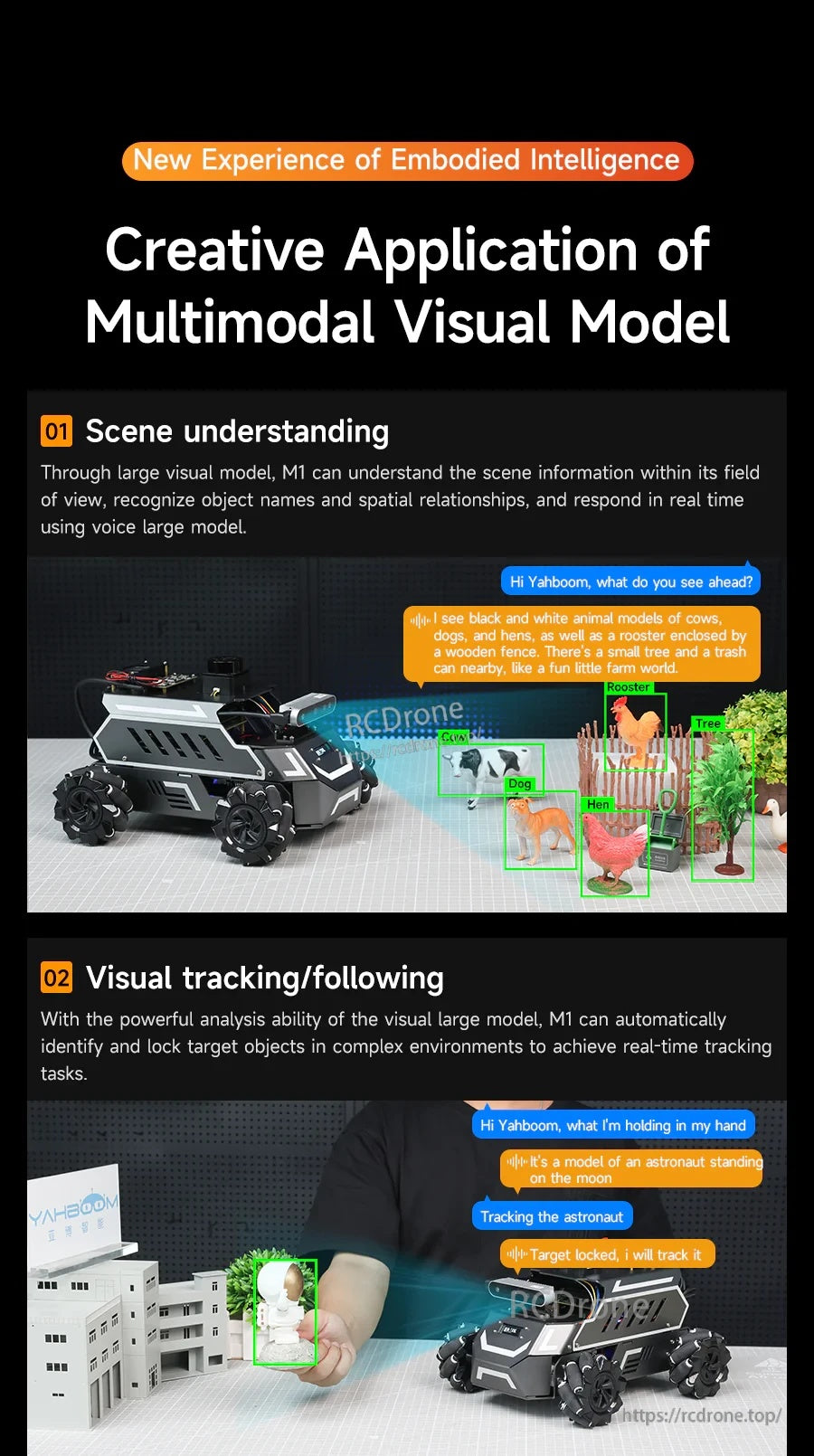
Visuella uppmaningar kan användas för scenförståelse och objektspårning i interaktiva robotikprojekt.

Djupdata kan kombineras med vision för att svara på avståndsfrågor och stödja spår-karta körfunktioner där de är tillgängliga.

Spår-karta tillbehör kan läggas till för vägmärkeskänning och relaterade autonoma köraktiviteter.

Färgspårning möjliggör autonom kryssning längs markerade rutter för klassrumsdemonstrationer och robotikövningar.
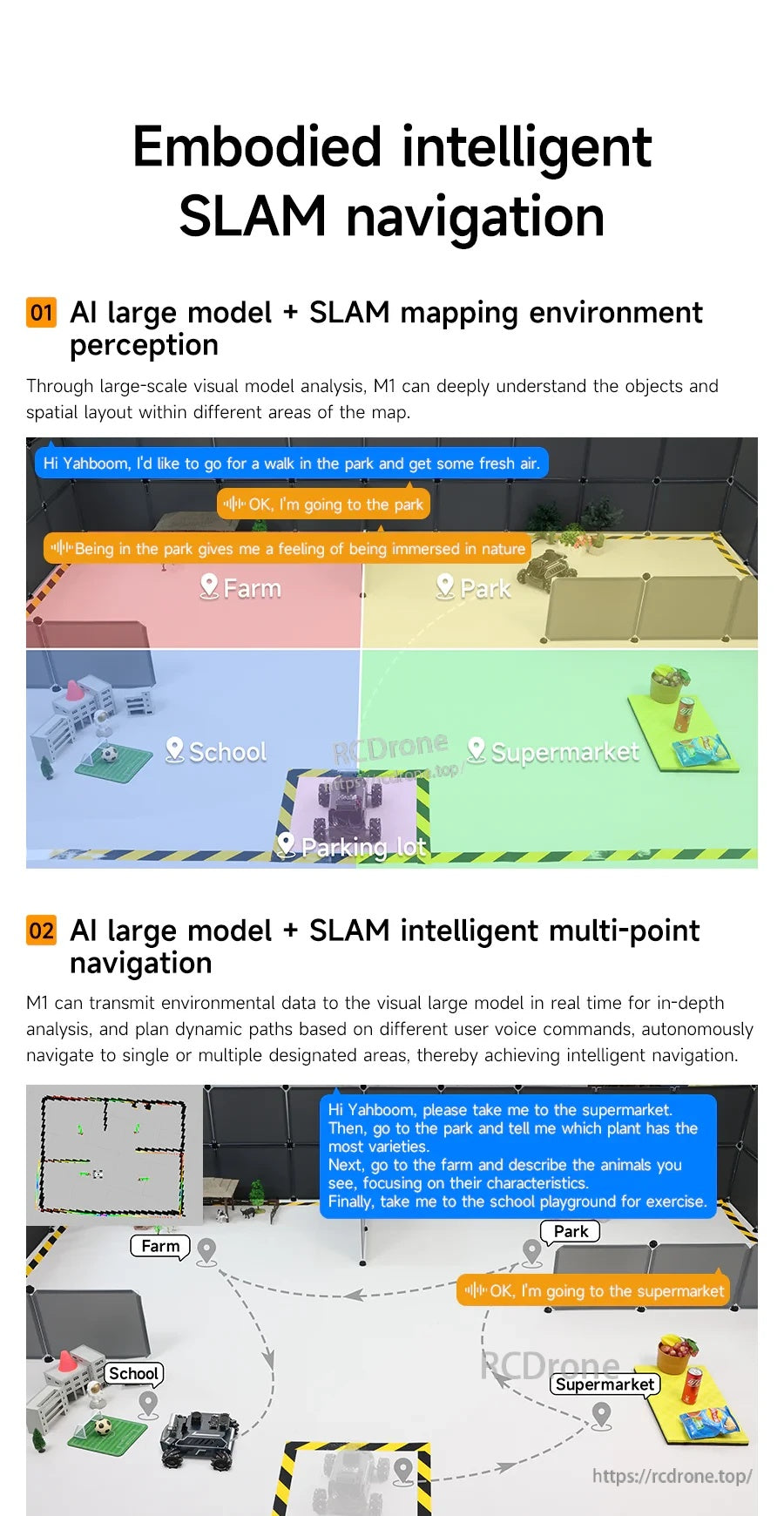
SLAM-kartläggning och arbetsflöden för navigering med flera punkter stödjer planering av rutter över flera målpunkter.
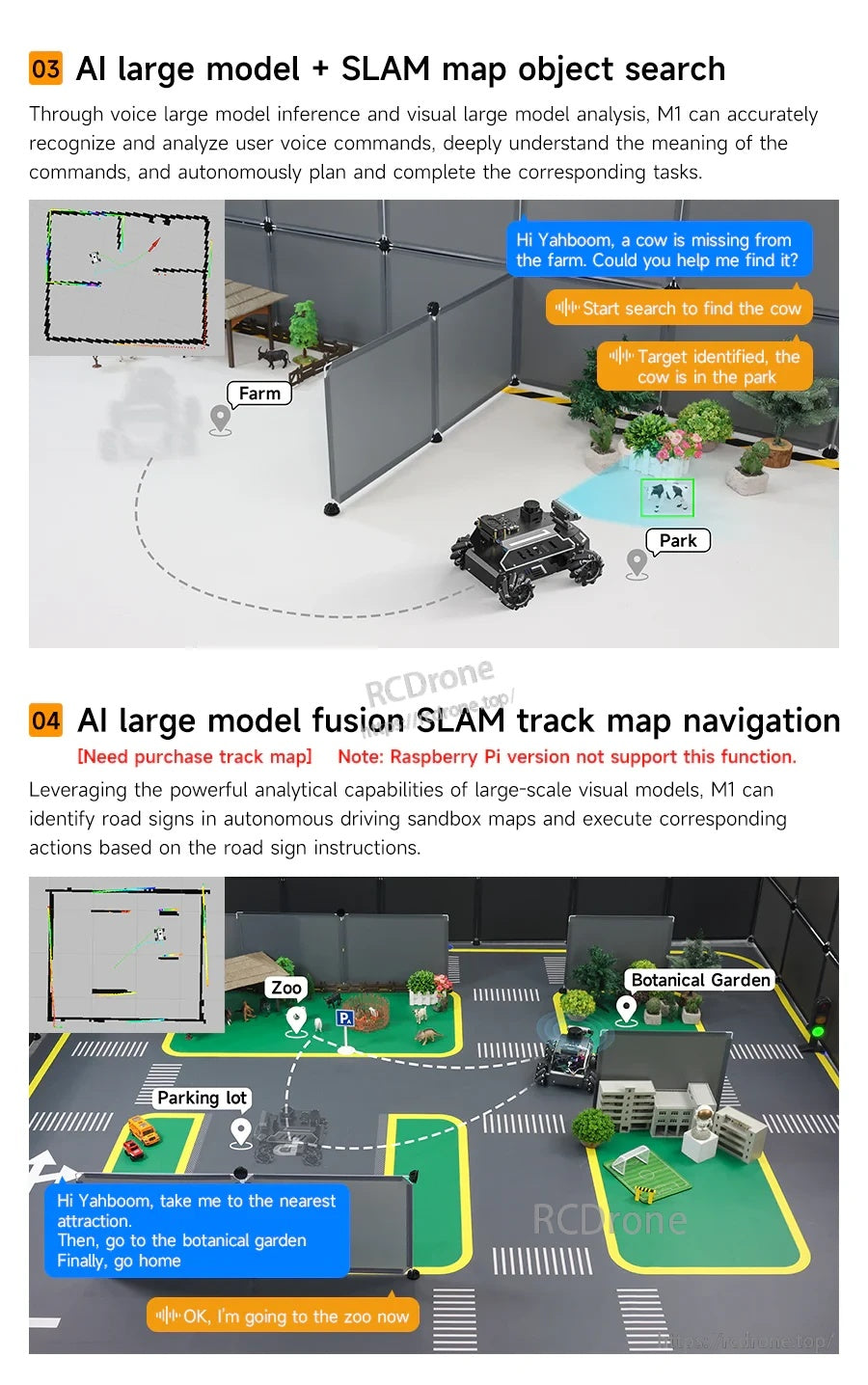
Röstintention och kartkontext kan användas för objektssökning och högre nivåer av navigeringsrutiner.
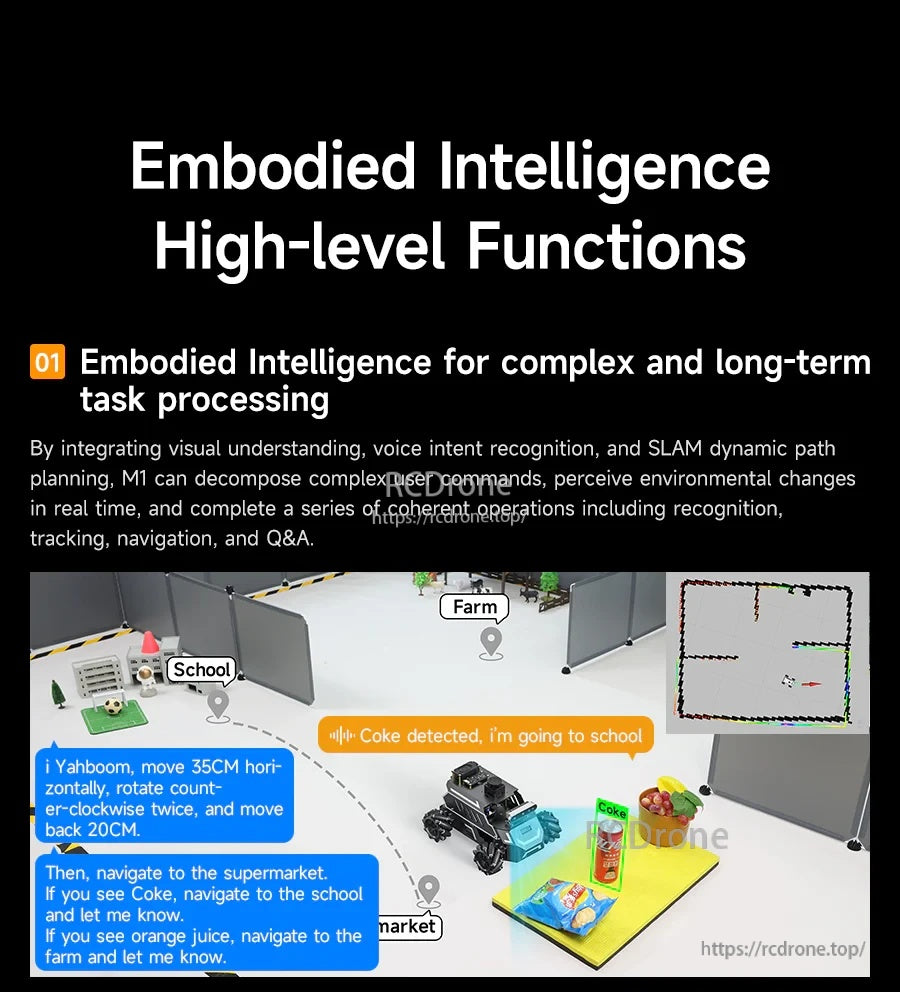
Beteenden på högre nivå kombinerar perception och navigering för att bryta ner längre uppgifter i genomförbara steg.

Kontextmedvetna svar hjälper roboten att anpassa sig till förändrade mål, med valfria spår-karta köraktiviteter.
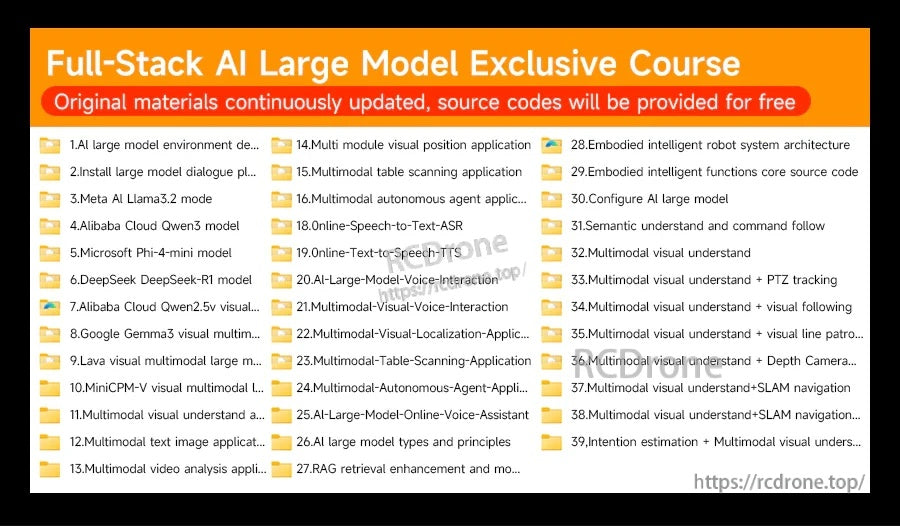
Kursmoduler täcker ett brett spektrum av AI + ROS-lärande ämnen, med kodresurser organiserade efter funktion.
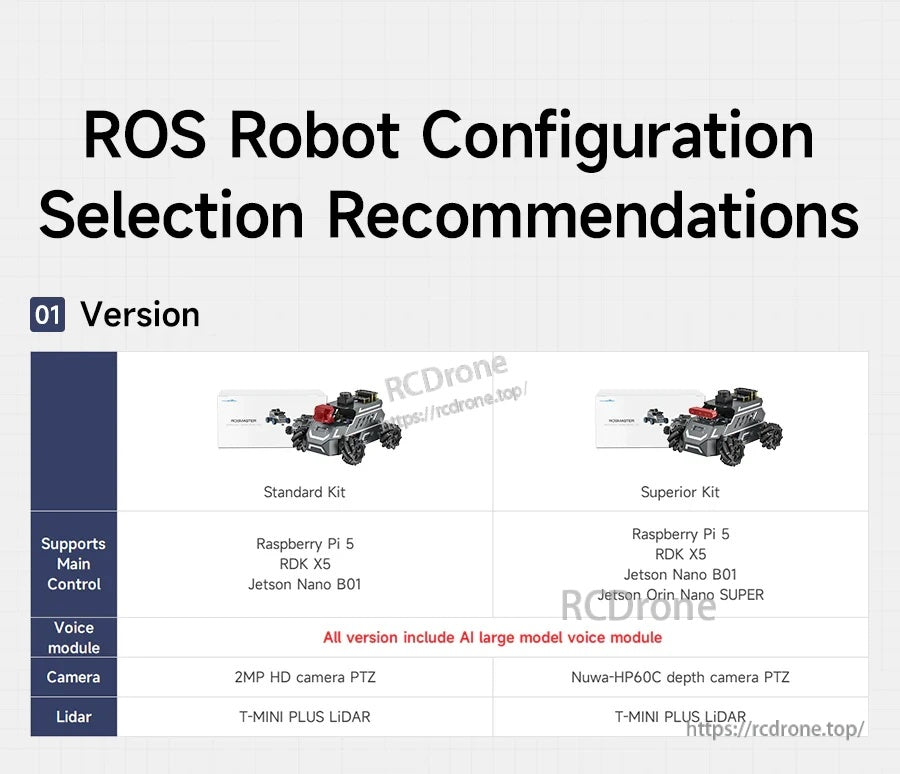
Välj mellan kitversioner baserat på din föredragna master-kontrollplattform och sensorkonfiguration.
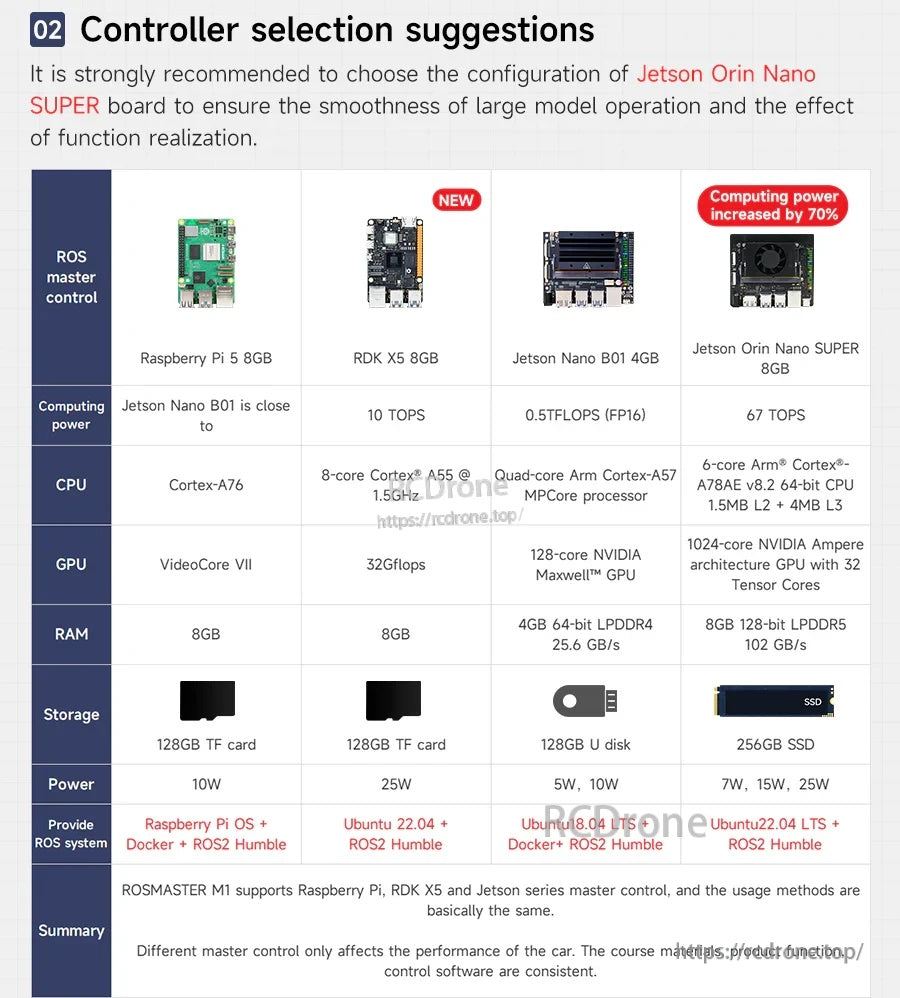
Vägledning för kontrollerprestanda hjälper till att matcha beräkningsbehov till dina ROS2 och multimodala inferensarbetsbelastningar.

ROSMASTER M1:s LiDAR-funktioner täcker vanliga ROS-kartläggningsalternativ, navigationslägen och hinderundvikande funktioner med IMU-assisterad fusion.
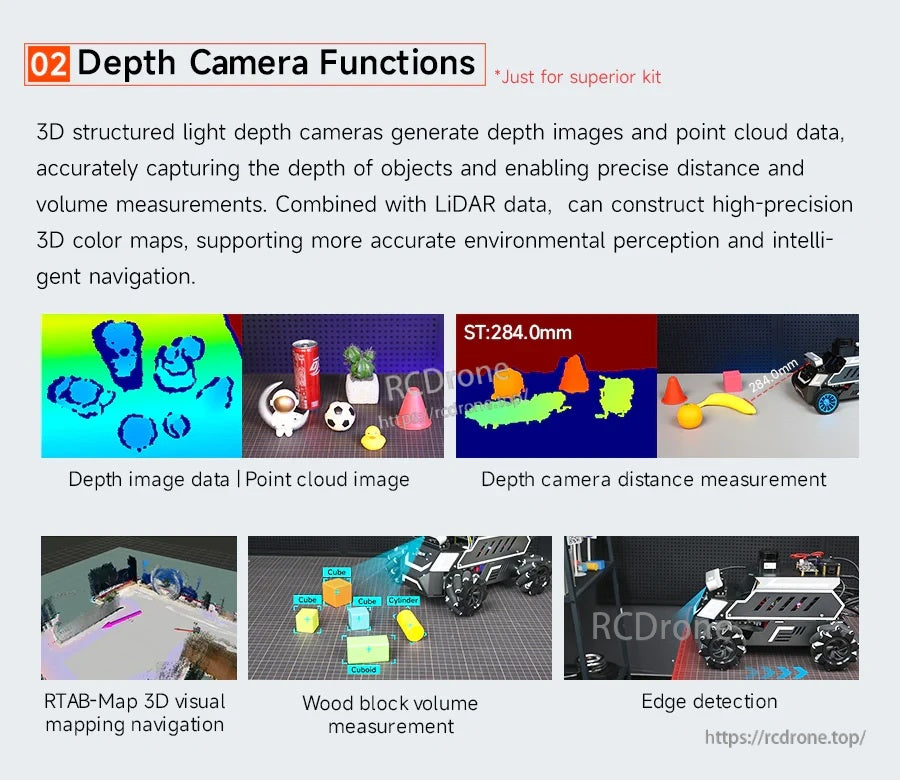
Stöd för djupkamera möjliggör punktmolnsdjupdata, avståndsmätning, RTAB-Map 3D visuell kartläggningsnavigering, volymmätning och kantdetektering.
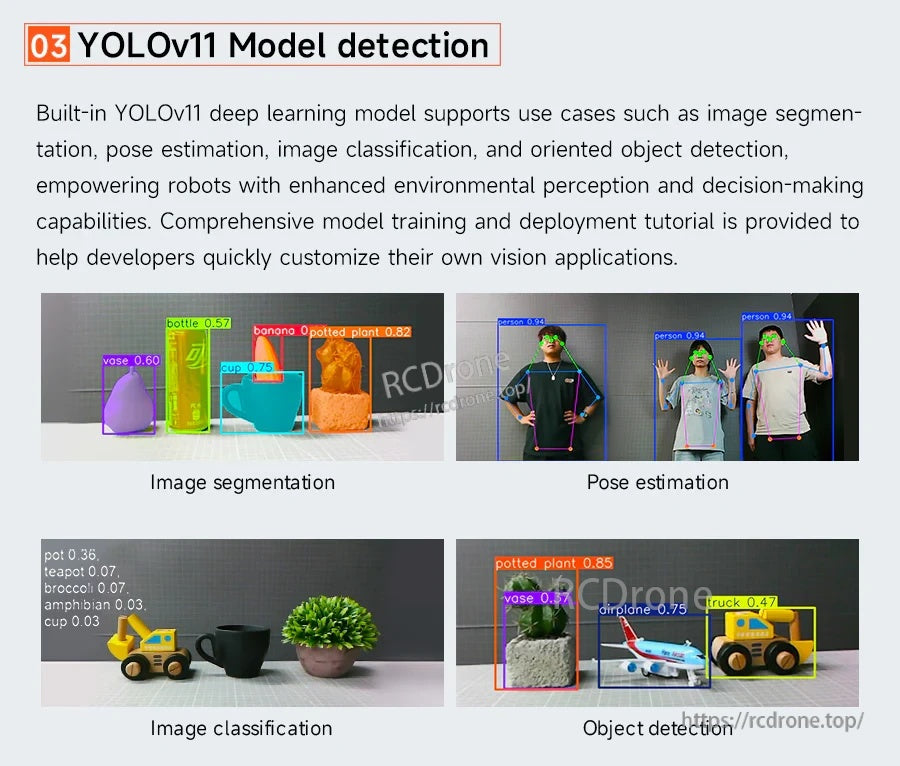
Inbyggda YOLOv11 visions-exempel täcker bildsegmentering, posestimering, bildklassificering och objektdetektering för robotikuppgifter.
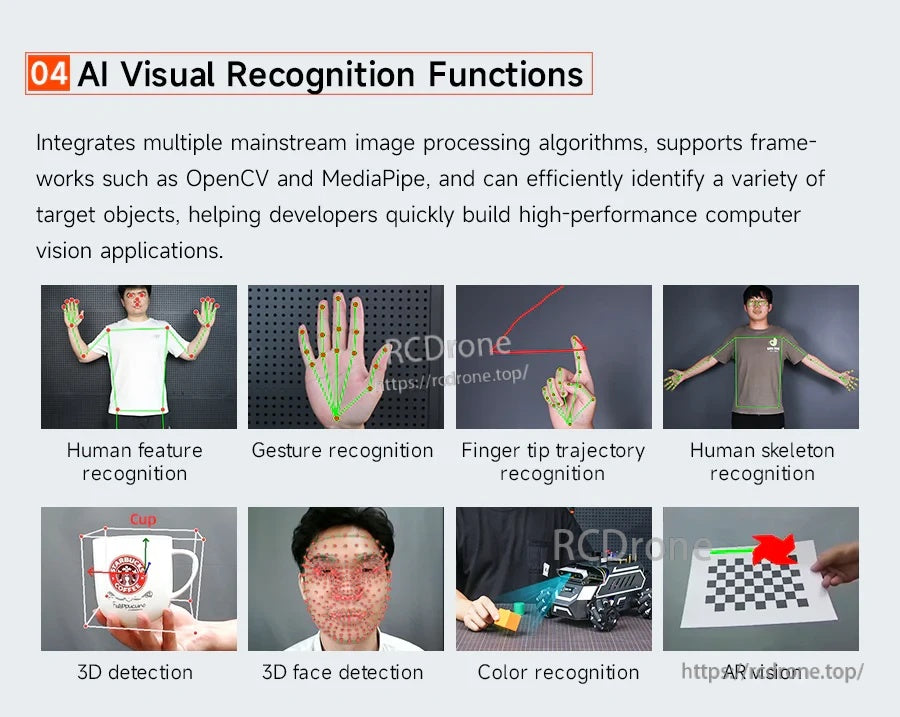
ROSMASTER M1 stöder OpenCV och MediaPipe-arbetsflöden för uppgifter som gest-, skelett-, fingertoppsspårning, 3D-detektering och färgigenkänning.
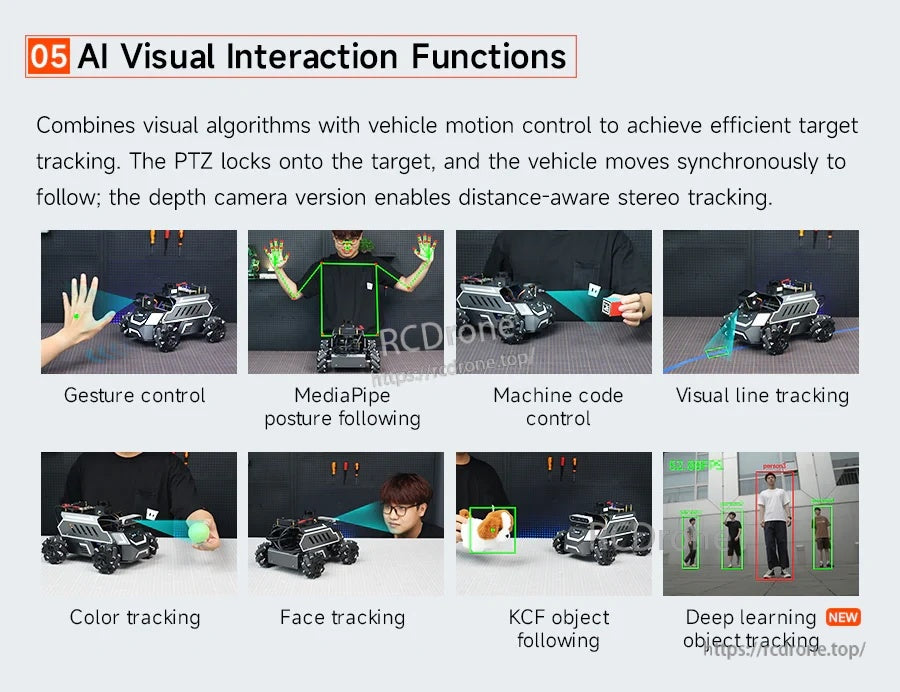
ROSMASTER M1 stöder AI-visuell interaktionsfunktioner som gestkontroll, linje- och färgspårning, ansiktsspårning och objektföljning.
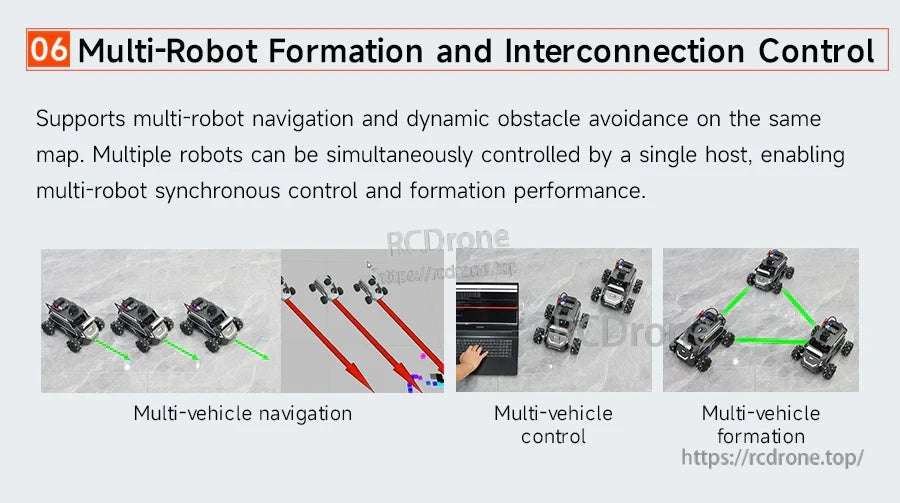
Yahboom ROSMASTER M1 ROS2-inställningen stöder multi-robotnavigering, synkroniserad kontroll från en enda värd och formationskörning.
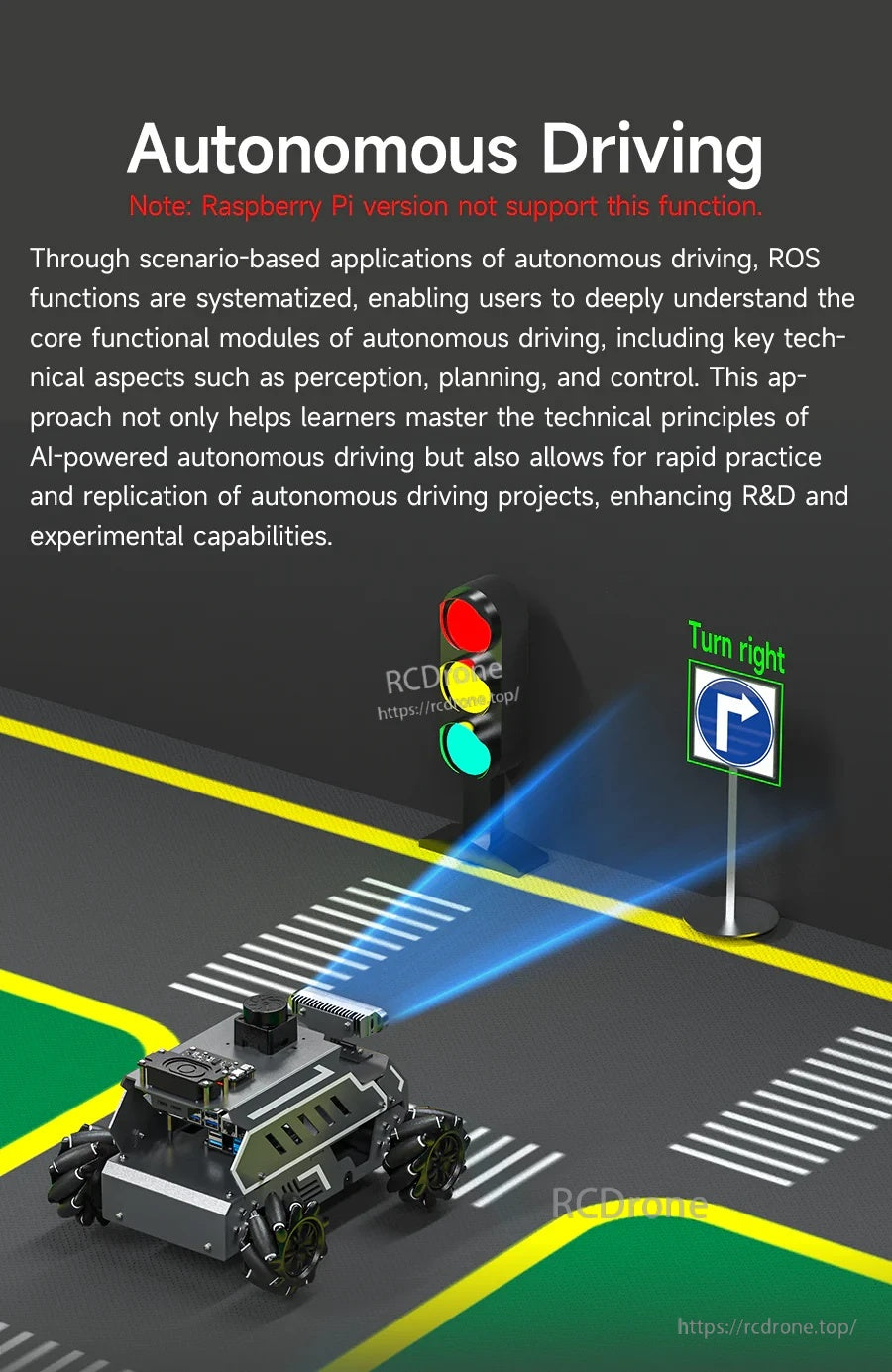
Yahboom ROSMASTER M1 stöder scenariobaserad autonom körövning i ROS, med en notering att Raspberry Pi-versionen inte stöder denna funktion.

ROSMASTER M1 stöder vägmärkesdetektion, filhållning, autonom parkering och styrbeslut baserade på filmarkeringar och trafikljus.
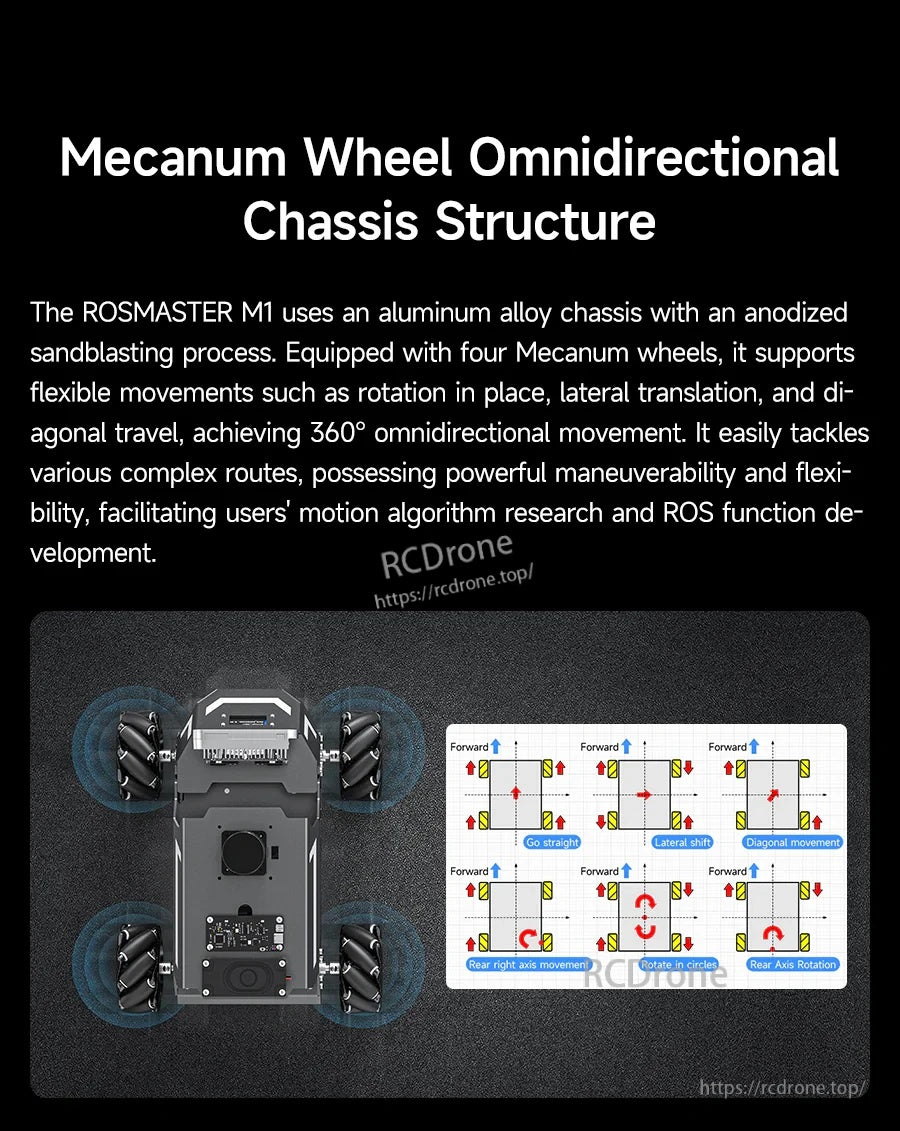
ROSMASTER M1 aluminiumlegeringschassi använder fyra Mecanum-hjul för att stödja 360° omnidirektionell rörelse, inklusive lateral och diagonal förflyttning.
Yahboom ROSMASTER M1 är utvecklad med hjälp av ROS2-systemet och refererar till ROS2 Humble Hawksbill-versionen.

ROSMASTER M1 stöder RViz-simulering för visualisering av radar- och odometridata, kameraflöden, kartbyggnad och SLAM-planering.

ROSMASTER M1 integrerar en toppmonterad LiDAR för 360° skanning för att stödja kartläggnings- och navigeringsuppgifter.

ROSMASTER M1 stöder plattformsoberoende kontroll via en datorterminal, en kartläggnings-/navigeringsmobilapp eller en standard USB trådlös kontroller.

ROSMASTER M1 robotlayout inkluderar lidar, en valfri PTZ-kamera och ROS-master, plus en USB 3.0-hubb och 6000mAh batteripaket för ren integration.
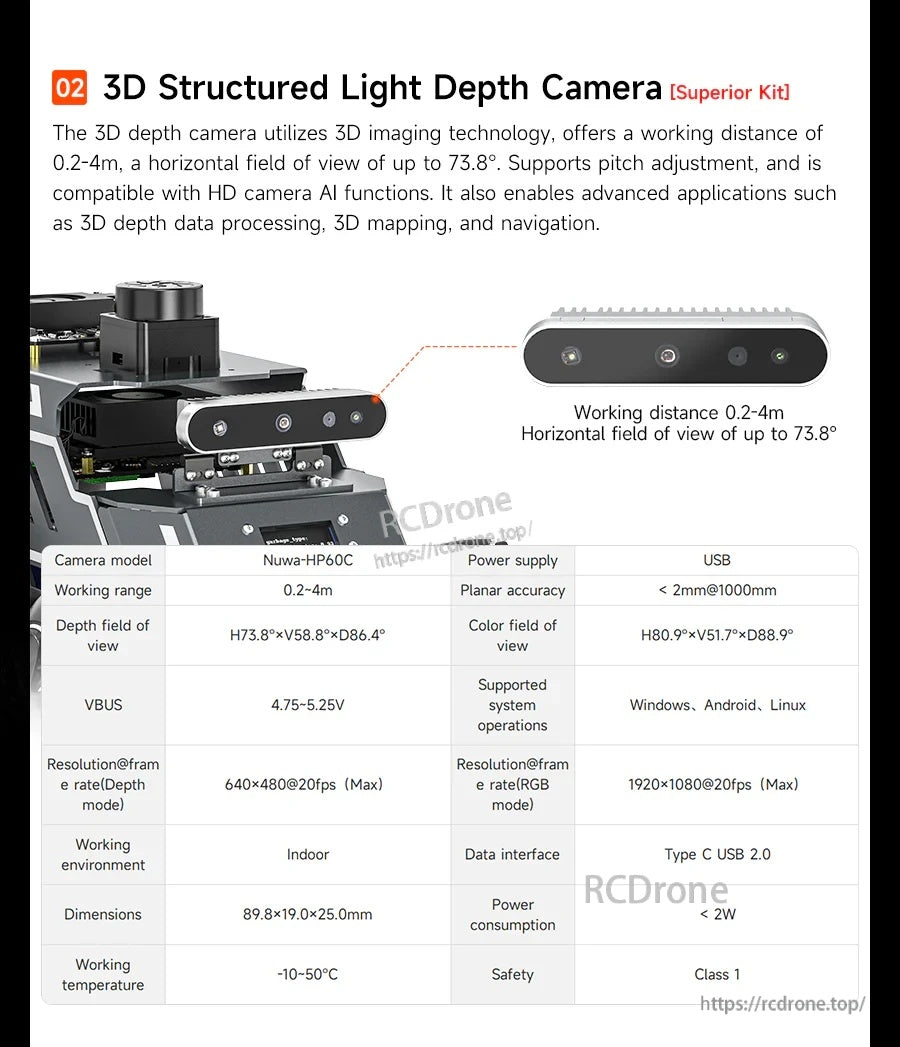
3D-strukturerat ljus djupkamerakit ansluts via USB Type‑C och stöder ett arbetsavstånd på 0,2–4 m med upp till 73,8° horisontellt synfält för kartläggnings- och navigeringsprojekt.

Standard/Superior Kit inkluderar en T-MINI Plus TOF LiDAR (5V, 300mA) med 0,05–12m räckvidd och 0–360° skanning.

Yahboom ROSMASTER M1 röstmodul parar ihop dubbla MEMS-mikrofoner med en kompakt högtalare och USB Type‑C-gränssnitt för 5V röstinmatning och uppspelning.
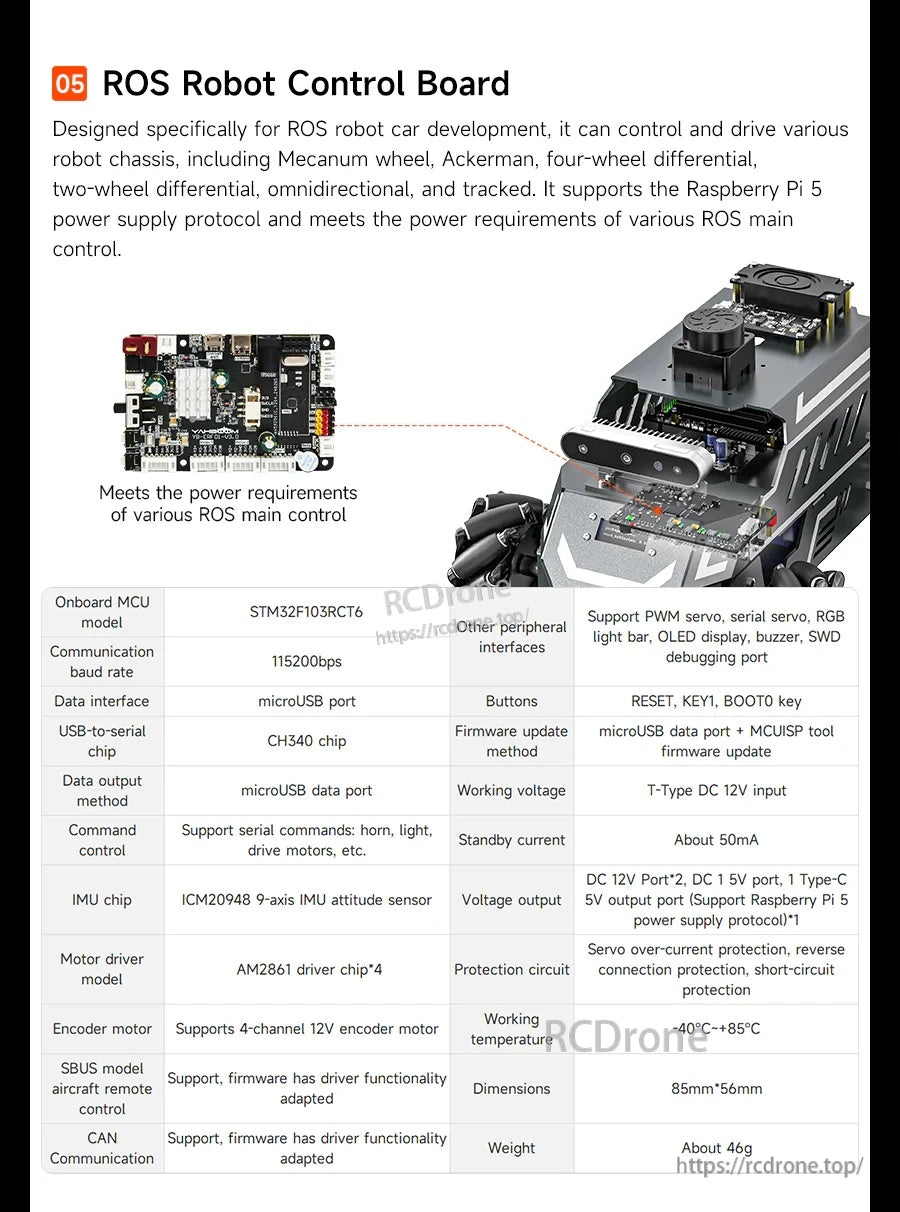
Yahboom ROSMASTER M1 ROS2 robotkontrollkort använder en Type‑C DC 12V strömingång och ger DC 12V/5V utgångar för att driva motorer och kringutrustning.
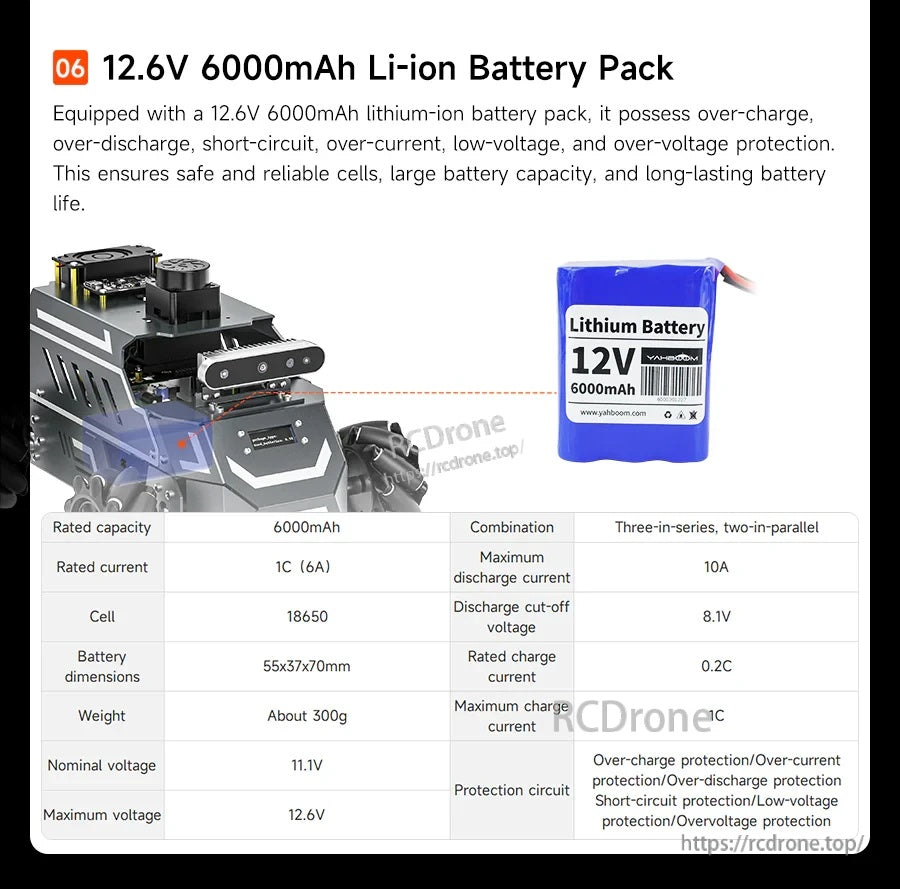
ROSMARTER M1 använder ett 12,6V 6000mAh litiumjonbatteripaket med inbyggda skyddsfunktioner och en kompakt förpackningsstorlek för enkel installation.
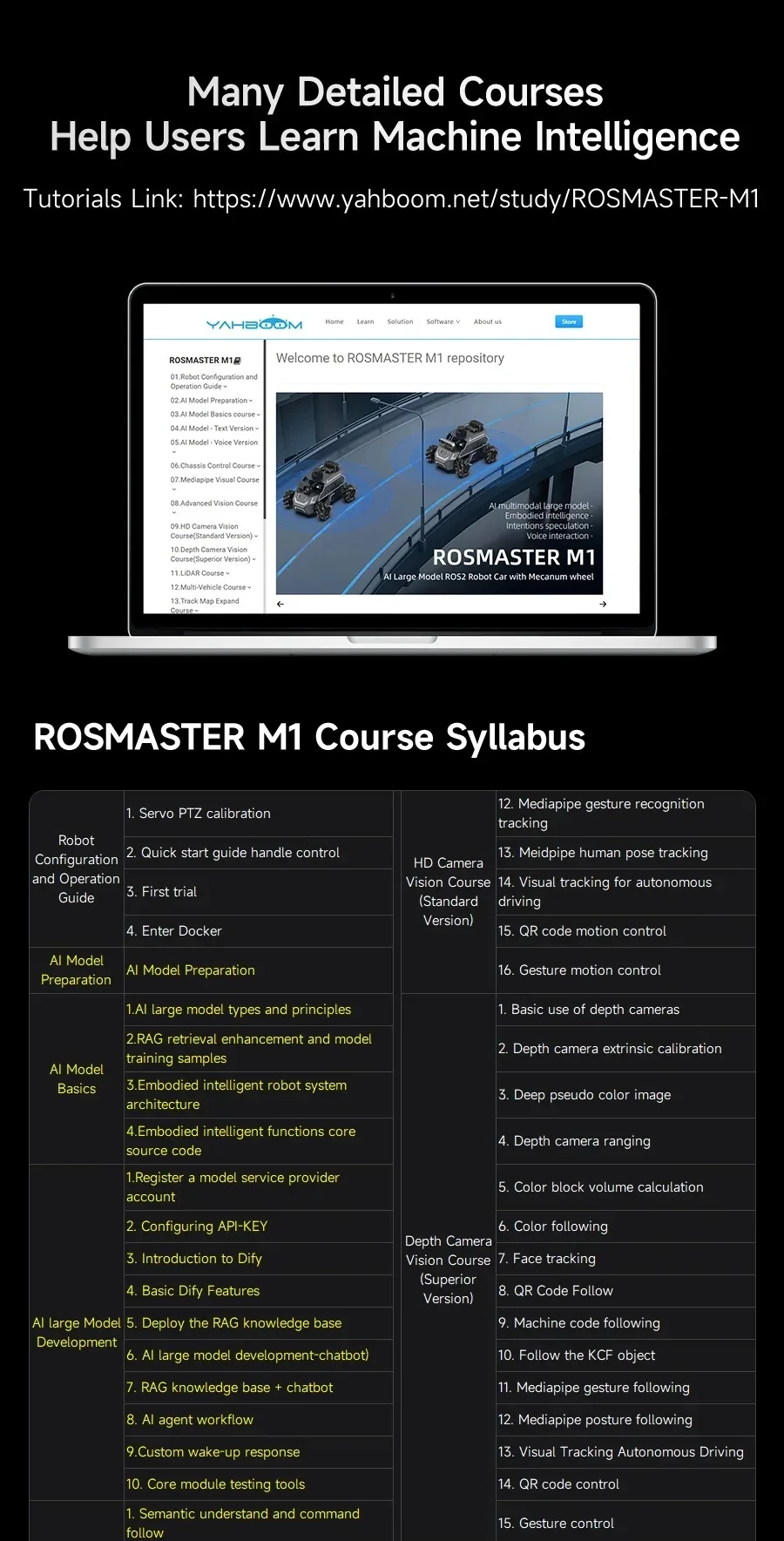
ROSMARTER M1 kursplan beskriver lektioner från installation och PID-kalibrering till visionuppgifter som QR-igenkänning, körfältsdetektion och färgspårning.
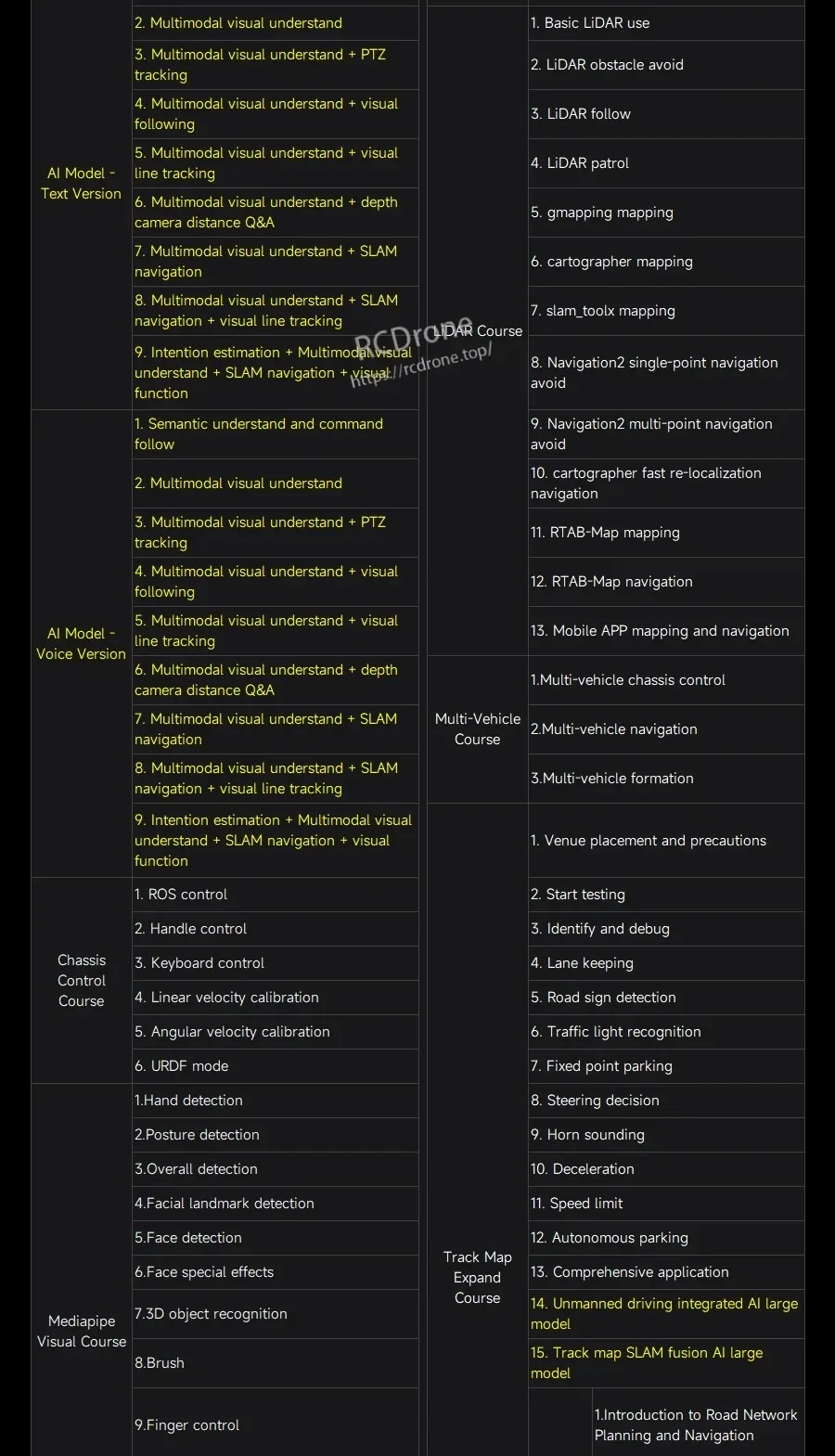
Yahboom ROSMASTER M1 ROS2 robot stöder LiDAR-kartläggning och navigeringsfunktioner tillsammans med chassi- och röststyrningsalternativ för utveckling och testning.
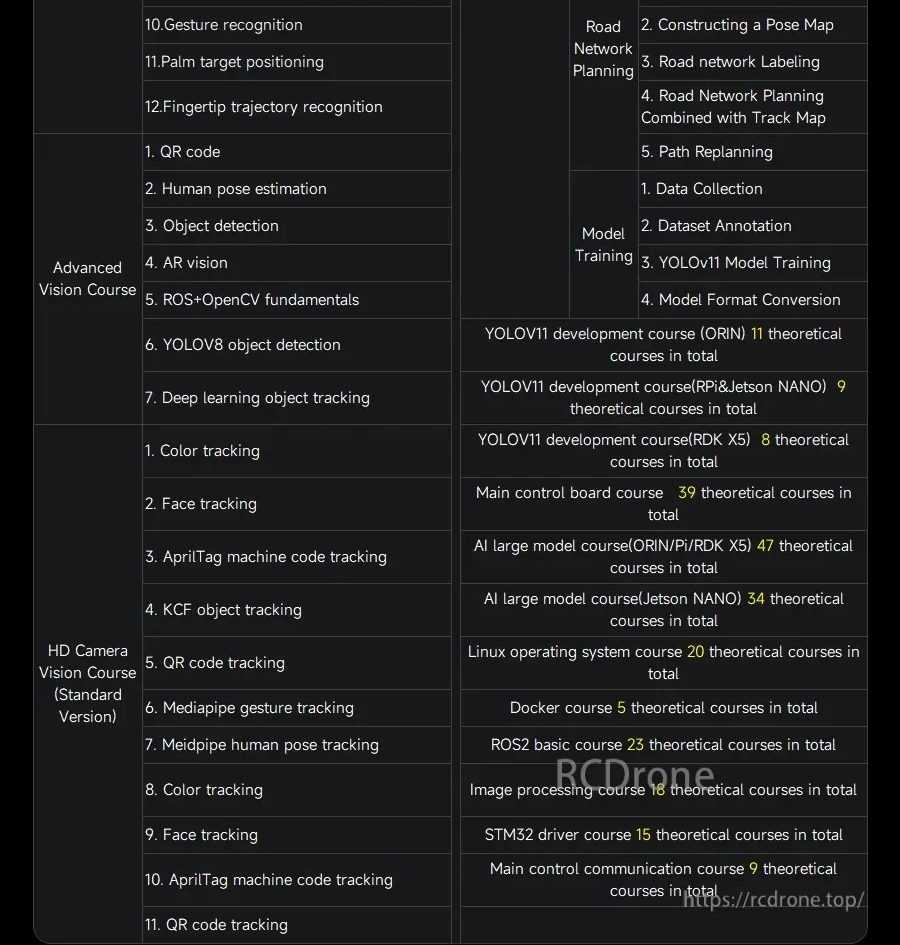
ROSMARTER M1 ROS2 robotpaket inkluderar en strukturerad läroplan som täcker YOLOv11-utveckling, ROS2-grunder, Linux, Docker och bildbehandling.
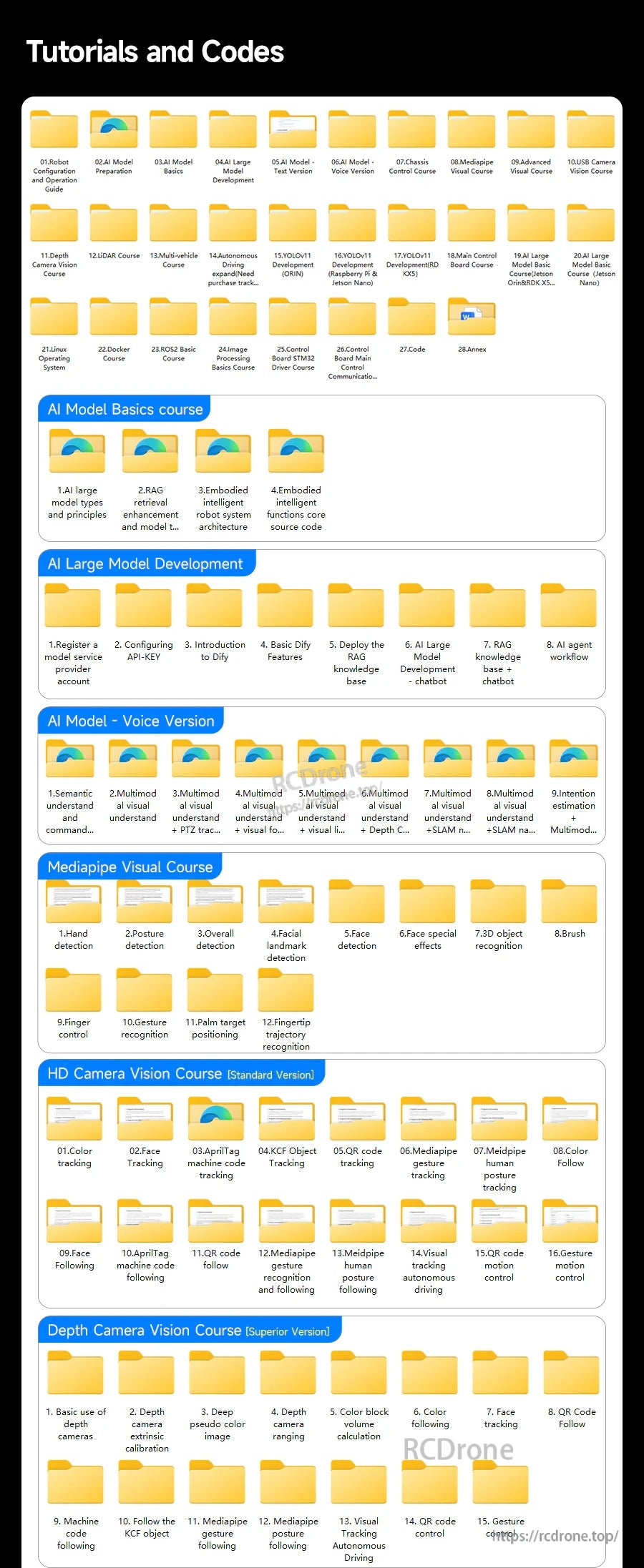
Yahboom ROSMASTER M1 ROS2 handledningar och kodresurser är organiserade i mappar för AI-modellens grunder, utveckling och visionskurser.
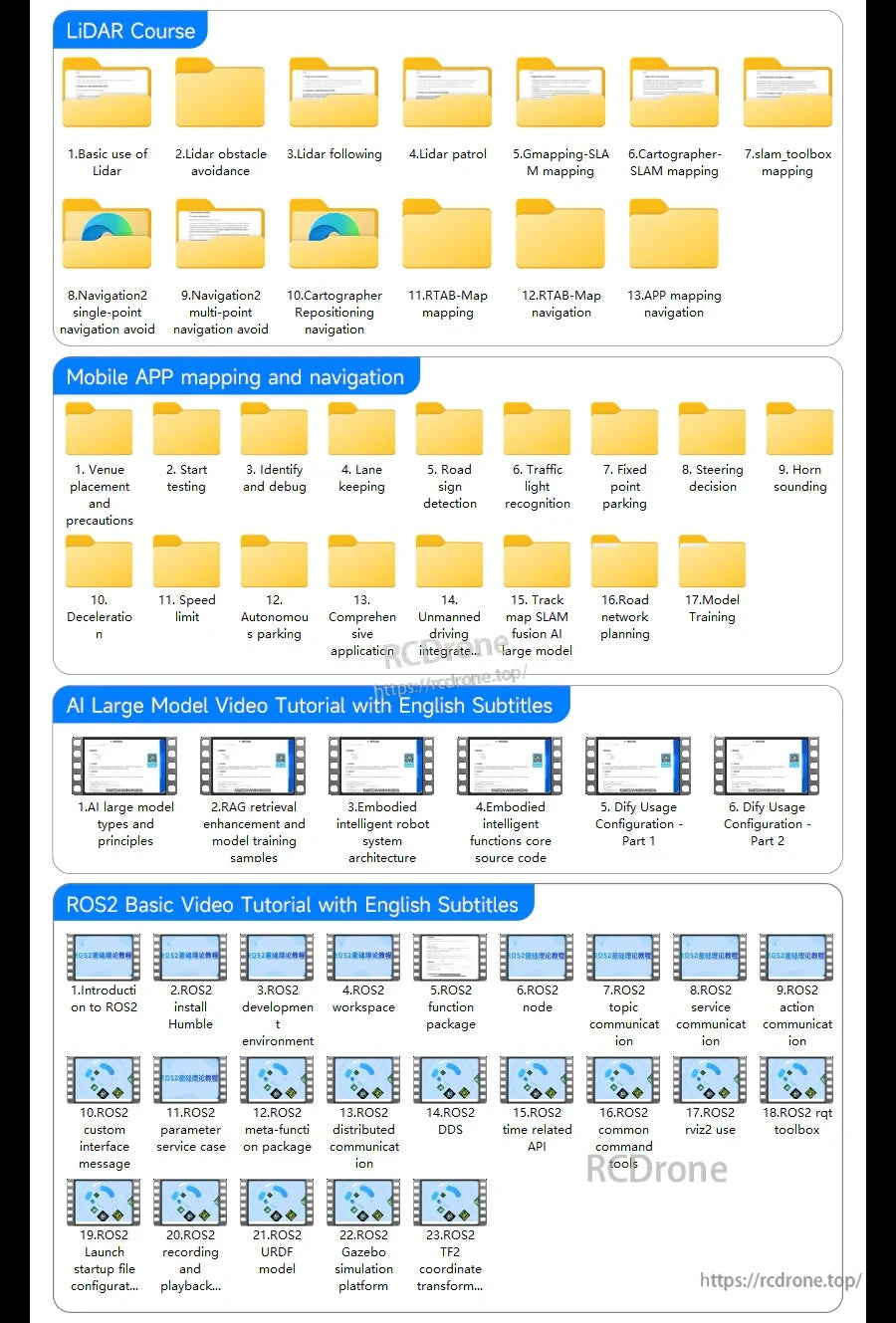
ROSMASTER M1 inlärningsmaterial täcker LiDAR-kartläggning och navigering, mobilappkontroll, AI-handledningar och ROS2-grunder med engelska undertexter.
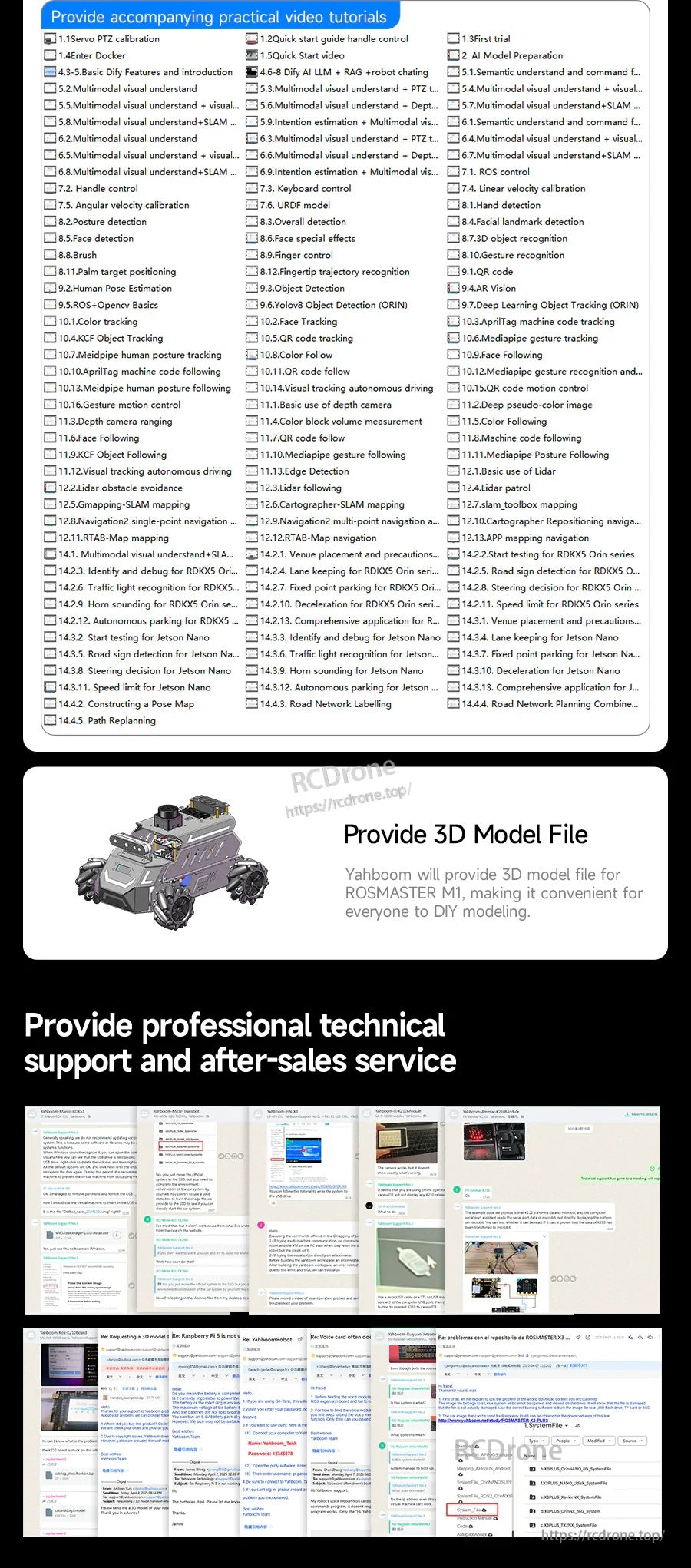
Yahboom ROSMASTER M1 inkluderar medföljande videohandledningar, en 3D-modellfilnedladdning och tillgång till tekniska supportresurser.

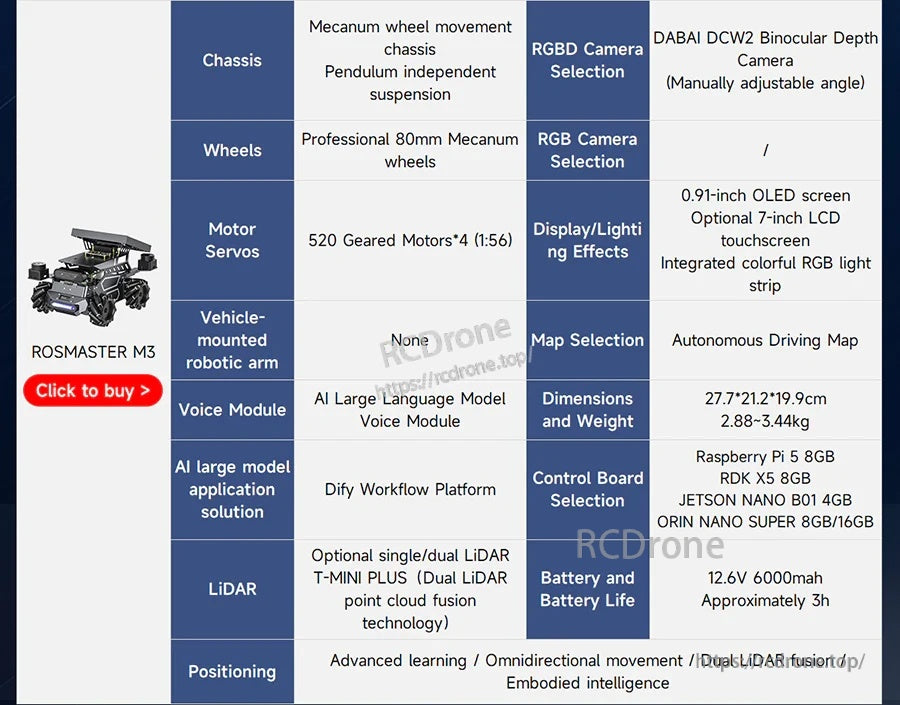
ROSMASTER-seriens specifikationer jämförs över viktiga områden som chassistyp, RGBD-kameraalternativ, display, kontrollkort och batterikapacitet.
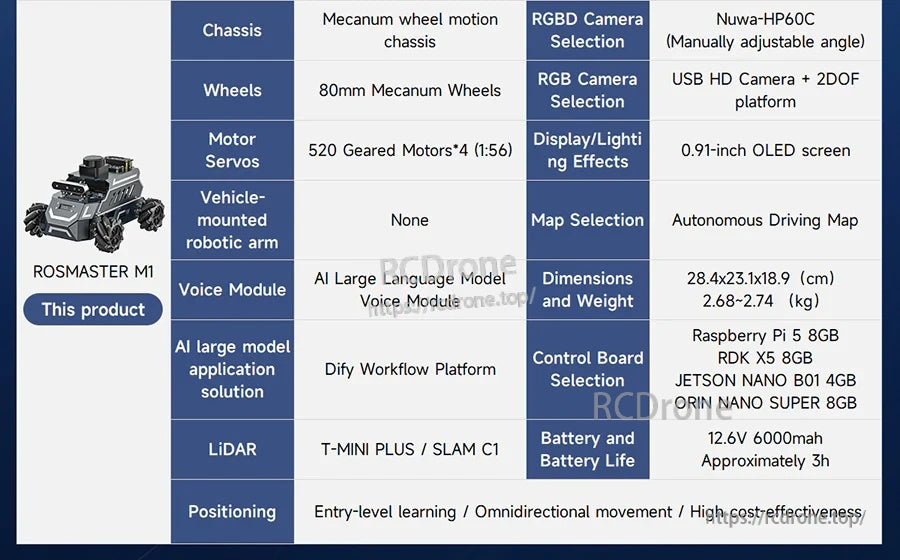
ROSMASTER M1 använder ett mekanumhjulschassi med 80 mm hjul, fyra 520 växelmotorer (1:56) och valfritt T-MINI PLUS eller SLAM C1 LiDAR-stöd.
ROSMASTER-plattformen kombinerar ett mekanumhjulschassi och 520 växelmotorer med alternativ som RGBD/djupkameraurval, LiDAR och ett 12,6V 6000mAh batteri.
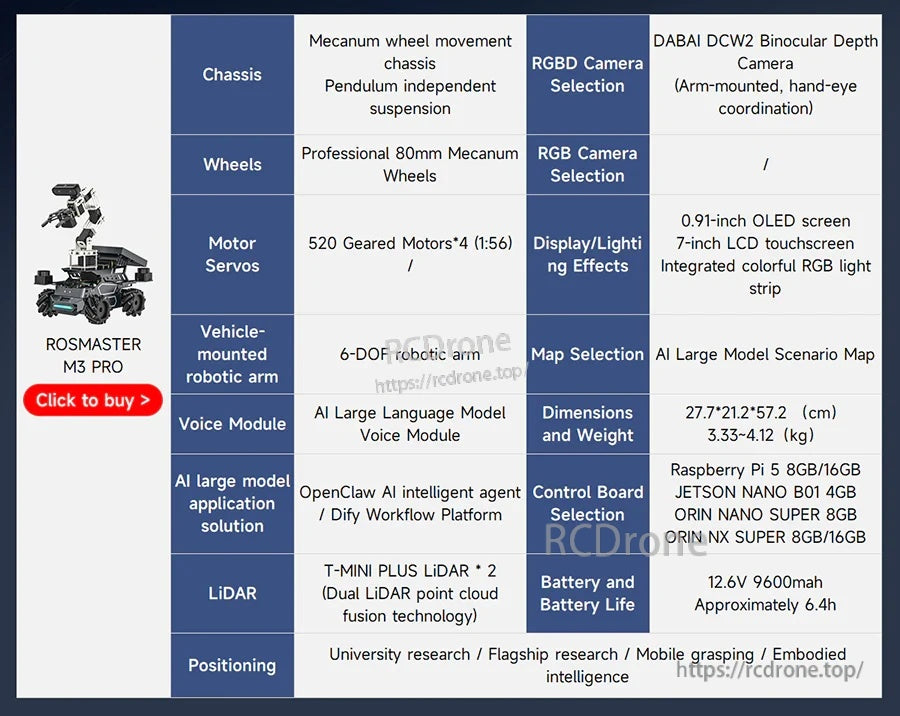
ROSMASTER M3 Pro har ett 80mm mecanum-hjulschassi, 4× 520 växelmotorer (1:56), dubbla LiDAR och en 6-DOF robotarm, med kontrollkortsalternativ inklusive Raspberry Pi 5 och Jetson.
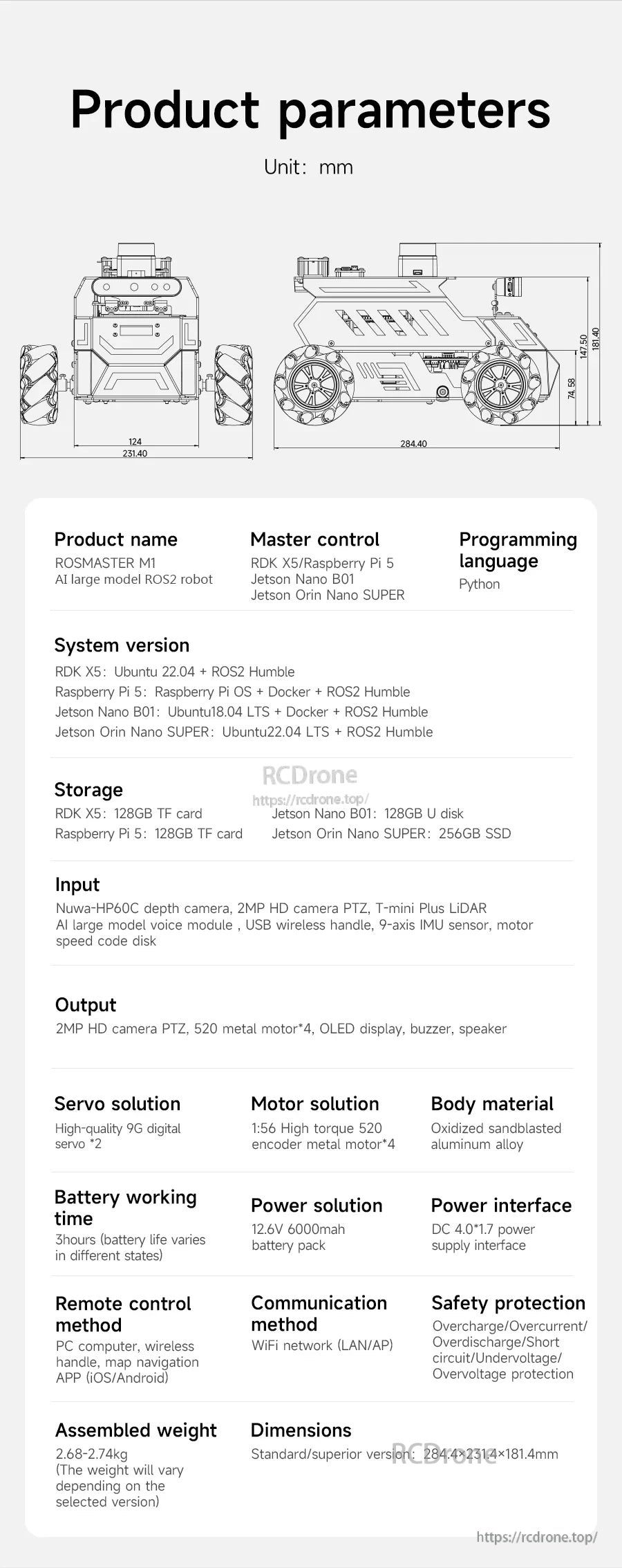
ROSMASTER M1 ROS2-robotspecifikationer listar övergripande dimensioner tillsammans med system-, lagrings- och strömförsörjningsdetaljer för planeringsintegration.
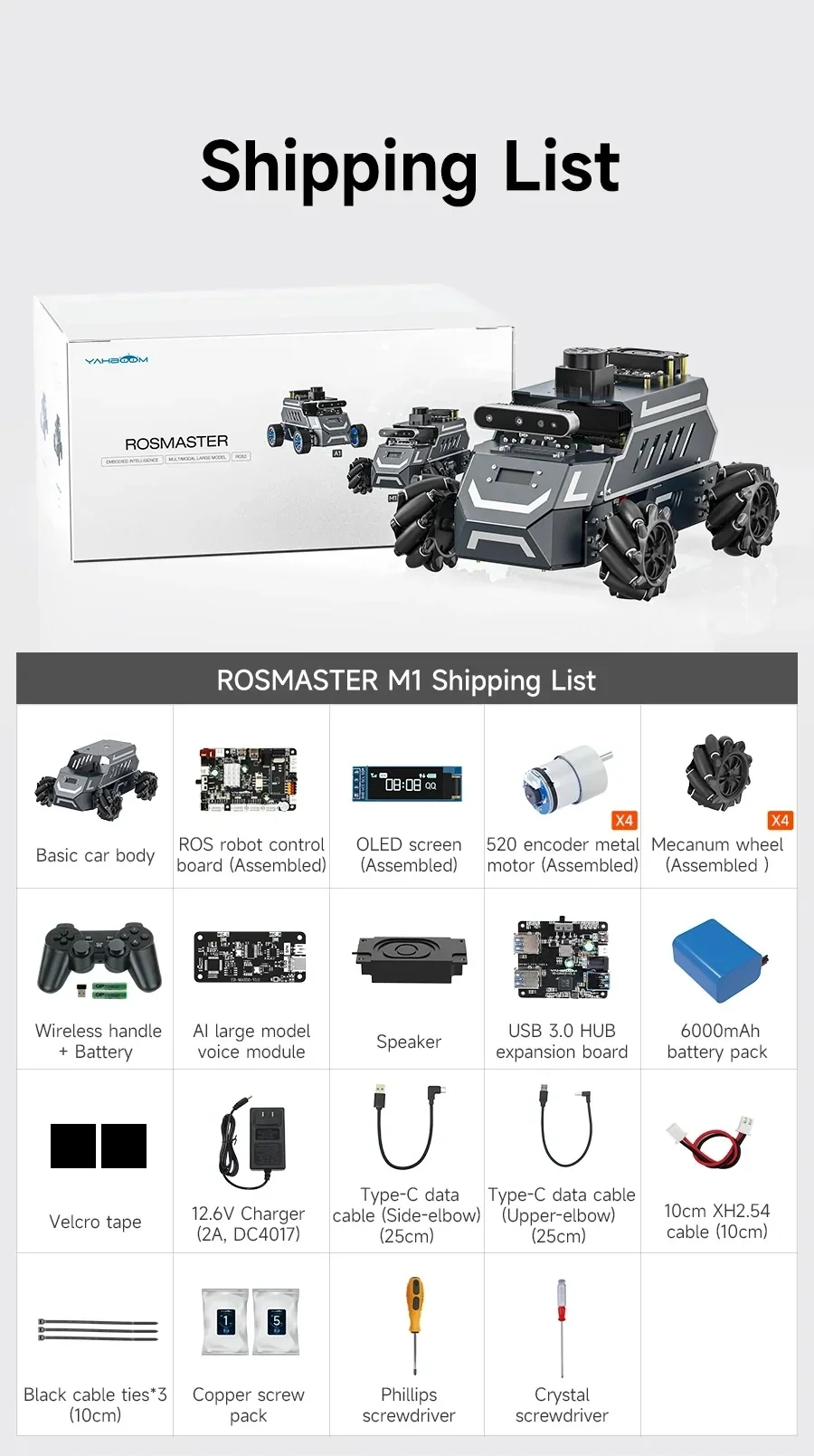
ROSMASTER M1-kitet inkluderar robotchassi, kontrollkort med OLED, encodermotorer med mecanum-hjul, batteripaket, laddare och nödvändiga kablar och verktyg.

ROSMASTER M1-tillbehörssatsen inkluderar en T-MINI PLUS LiDAR, kameraalternativ, Type-C-kablar, monteringsfästen och skruvpaket för montering.
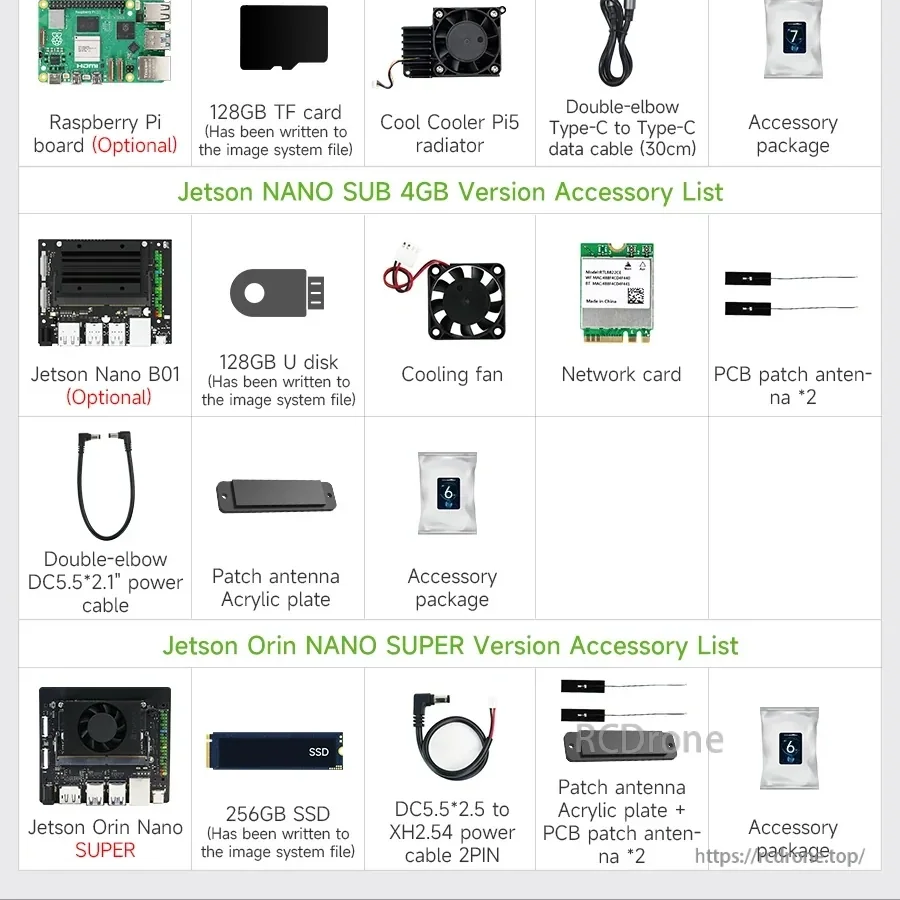
ROSMASTER M1 ROS2-robottillbehörslistan inkluderar valfria Jetson- eller Raspberry Pi-kort, kylkomponenter, ström-/datakablar och 128GB/256GB lagringsalternativ.
Related Collections






















