Bodi ya Kipokezi cha ZED-F9P-01B-01 RTK GNSS, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
Bodi ya Kipokezi cha ZED-F9P-01B-01 RTK GNSS, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
RCDrone
Couldn't load pickup availability
Muhtasari
Bodi hii ya mpokeaji wa GNSS inategemea moduli ya u-blox ZED-F9P-01B-01 na inatoa msaada wa upimaji wa tofauti wa RTK pamoja na USB-C, pini za UART/SPI, na chaguzi za kiunganishi cha antena mbili kwa ajili ya kuunganishwa katika roboti, autopilot, na mifumo ya urambazaji.
Vipengele Muhimu
- Kiunganishi cha USB: Muunganisho wa USB Aina-C kwa ajili ya usanidi na u-kitu na kuangalia haraka sentensi za NMEA; inajitambulisha kama bandari ya COM ya serial isiyoegemea kwenye kiunganishi cha UART.
- Chaguzi za nguvu: Regulator ya 3.3V iliyopo kwenye bodi inabadilisha 5V USB kuwa 3.3V inayohitajika na moduli; inasaidia ingizo la nje la 5V au usambazaji wa moja kwa moja wa 3.3V.
- Mapendekezo ya 3.3V yenye kelele ya chini: Wakati wa kutoa 3.3V moja kwa moja, usambazaji safi wenye kelele kidogo unashauriwa (chini ya 50mV PVP ripple inatajwa kama bora kwa upimaji sahihi).
- Kushiriki kwa UART/SPI: Pini za jadi za serial zinapatikana lakini zinashirikiwa na pini za SPI; kwa kawaida pini za UART zimewezeshwa.DSEL jumper kwenye nyuma ya bodi inapaswa kuwa wazi.
- Usimamizi wa RTCM3 kwenye UART2: Bandari ya pili ya serial (UART2) inatumika hasa kwa data za marekebisho ya RTCM3; kwa kawaida inapata na kuchambua RTCM3 zinazokuja ili kuwezesha hali ya RTK. Katika hali ya kituo cha msingi, UART2 inatoa data za marekebisho ya RTCM3.
- Kiunganishi cha autopilot: GH1.25-6P (kiwango cha Pixhawk JST-GH) kwa kuunganisha na autopilot ya Pixhawk na/au kutoa nguvu kwa bodi.
- Viunganishi vya antena: Interfaces mbili za antena zinapatikana: SMA (screw ya nje, shimo la ndani) na U.FL (IPEX); yoyote inaweza kutumika.
- LED za hali: LED nne za hali (Nguvu, PPS, RTK, FENCE) kwa ajili ya kuashiria mfumo/RTK/geofencing.
Maelezo
| Moduli ya GNSS (lebo ya moduli) | u-blox ZED-F9P-01B-01 |
| Alama ya bodi (inaonekana kwenye picha ya bodi) | ZED-F9P-01B-00 |
| USB | USB Aina-C; inajitambulisha kama bandari ya COM ya serial (bila kujali UART) |
| Serial / SPI | Pins za UART zinashirikiwa na pins za SPI; UART imewezeshwa kwa default; jumper ya DSEL nyuma inapaswa kuwa wazi |
| Uelekeo wa pini za UART (zinashirikiwa na SPI) | TX/MISO = pato kutoka ZED-F9P; RX/MOSI = RX ndani ya ZED-F9P |
| Bandari ya pili ya serial | UART2 (hasa kwa data za marekebisho ya RTCM3; inaweza kutoa RTCM3 katika hali ya kituo cha msingi) |
| Udhibiti wa nguvu | Regulator ya 3.3V imetolewa ili kudhibiti 5V USB hadi 3.3V inahitajika na moduli |
| Chaguzi za kuingiza nguvu (zilizoelezwa) | USB 5V, 5V ya nje, au usambazaji wa moja kwa moja wa 3.3V |
| Kumbukumbu ya kelele ya usambazaji wa 3.3V (iliyosemwa) | Chini ya 50mV PVP ripple inasemekana kuwa bora wakati wa kusambaza 3.3V moja kwa moja |
| Uwezo wa regulator wa 3.3V (iliyosemwa) | 600mA kutoka kwa ingizo la 5V |
| Uwezo wa nguvu wa USB-C (iliyosemwa) | Inauwezo wa kutoa 2A |
| Bandari ya J3 | GH1.25-6P (viwango vya Pixhawk JST-GH) |
| Pinout ya J3 (kiwango cha Pixhawk) | 1: 5V_IN; 2: ZED-F9P UART1 kupokea (kiwango cha 3.3V); 3: ZED-F9P UART1 TX (kiwango cha 3.3V); 4,5: Hazijakamilishwa; 6: Ardhi |
| Viashiria vya LED (vilivyoelezwa) | Nguvu (nyekundu wakati 3.3V inafanya kazi kupitia USB au Qwiic bus); PPS (njano, mara moja kwa sekunde baada ya kufunga nafasi); RTK (bluu: inawaka baada ya nguvu, inang'ara baada ya kupokea data ya RTCM, inazima baada ya RTK fix); FENCE (inasanifishwa kwa matumizi ya geofencing) |
| Viunganishi vya Antena | SMA na U.FL (IPEX); kiunganishi chochote kinakubalika |
| Leibuli za kichwa (silkscreen, upande wa kushoto) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| Leibuli za kichwa (silkscreen, upande wa kulia) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
Maombi
- Uwekaji wa RTK GNSS kwa drones, UGVs, robotics, na prototypes za urambazaji
- Muunganisho wa Pixhawk/autopilot GNSS kupitia JST-GH (GH1.25-6P) muunganisho wa serial
- Mipangilio ya RTK inayotumia RTCM3 kwa viungo vya data vya marekebisho (redio au waya) kupitia UART2
Kuhusu maswali ya ulinganifu (uchaguzi wa UART/SPI, wiring ya RTCM3, antena, au uunganisho), wasiliana na msaada kwa https://rcdrone.top/ au barua pepe [email protected].
Maelezo

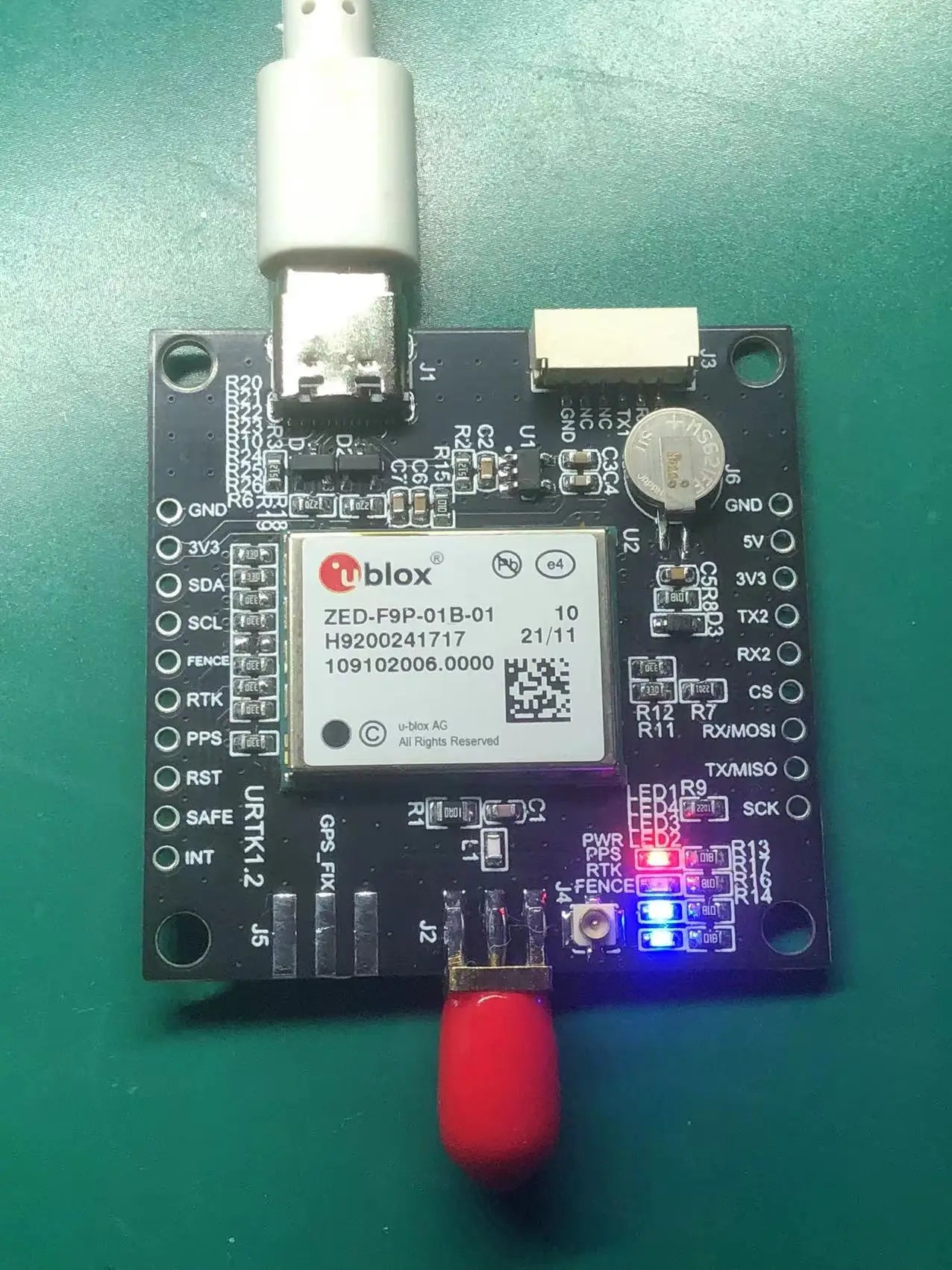
Bodi ya mpokeaji ya ZED-F9P inachanganya muunganisho wa USB-C na pini za I/O zilizoandikwa wazi na U.FL kiunganishi cha antena kwa uunganisho rahisi.
Kiolesura cha USB‑C kinauunganisha ZED‑F9P na u‑center au Raspberry Pi kama bandari ya COM ya serial huru, ikiwa na udhibiti wa 3.3V kutoka kwa nguvu ya USB ya 5V.
Bodi ya ZED-F9P inatumia pini za UART/SPI zilizoshirikiwa na bandari ya pili ya serial (UART2) ambayo hutumiwa mara nyingi kwa data za marekebisho ya RTCM3 ili kuwezesha hali ya RTK.
Muundo wa pini wa kiunganishi cha J3 GH1.25-6P Pixhawk unataja 5V_IN, UART1 RX/TX (3.3V kiwango), na ardhi, na bodi inatumia LED nne za hali kwa nguvu, kufungwa kwa PPS, na shughuli za RTK/RTCM.
Bodi ya mpokeaji wa ZED-F9P RTK GNSS inatoa chaguo mbili za kiunganishi cha antena—SMA na U.FL (IPEX)—kwa usakinishaji wa kubadilika.
Related Collections