



Moduli wa GPS wa Axisflying M10 na Kampasi (QMC5883), M10050-KB, NMEA/UBX, 20x20x6mm kwa FPV Freestyle & Umbali Mrefu
Moduli wa GPS wa Axisflying M10 na Kampasi (QMC5883), M10050-KB, NMEA/UBX, 20x20x6mm kwa FPV Freestyle & Umbali Mrefu
Axisflying
Couldn't load pickup availability
Overview
Moduli wa GPS wa Axisflying M10 wenye kompasu ni moduli ndogo ya GPS ya multi-constellation iliyoundwa kwa ajili ya drones za FPV freestyle na za umbali mrefu. Inajumuisha chip ya M10050-KB GNSS na kompasu ya kielektroniki ya ndani (QMC5883), ikitoa pato la UART GPS na data za kompasu za I2C kwa ajili ya kuweka nafasi na kuelekeza kwa usahihi kwenye vidhibiti vya ndege. Moduli hii inafanya kazi kwa DC 3.6V–5.5V (kawaida 5.0V) ikiwa na kiwango cha pato cha 3.3V TTL na inasaidia protokali za NMEA/UBX.
Key Features
- M10050-KB GNSS yenye GPS L1, GLONASS L1, BDS B1, GALILEO E1, SBAS L1, QZSS L1.
- Protokali za pato: NMEA-0183 na UBX; sentensi za NMEA RMC, VTG, GGA, GSA, GSV, GLL.
- Masafa ya sasisho 1Hz–10Hz (kawaida 1Hz); kiwango cha baud cha kawaida 38400bps (kati ya 4800–921600bps).
- Kompasu ya kielektroniki ya QMC5883 iliyojumuishwa kupitia I2C (SDA/SCL).
- Uwezo wa juu: Ufuatiliaji -167dBm, Upataji tena -160dBm, Kuanzisha baridi -148dBm, Kuanzisha moto -156dBm.
- Usahihi: 2.0 m CEP 2D RMS (SBAS ya ziada, angani wazi), Usahihi wa kasi 0.1m/s (95% SA imezimwa), Usahihi wa muda 1ns.
- 4M FLASH kwa ajili ya kuhifadhi mipangilio baada ya kupoteza nguvu.
- Mipaka ya uendeshaji: Kimo <50,000m; Kasi <515m/s; Kasi ya mvutano <4g.
- Ukubwa mdogo 20mm*20mm*6mm; eneo la antenna takriban 18mm*18mm.
- Kiwango pana cha joto: Uendeshaji -40°C ~ +85°C; Hifadhi -40°C ~ +105°C.
- Taa za onyesho: Taa ya TX inawaka mara moja wakati wa kuwasha; Taa ya PPS inaanza kuwaka baada ya kuweka nafasi ya 3D.
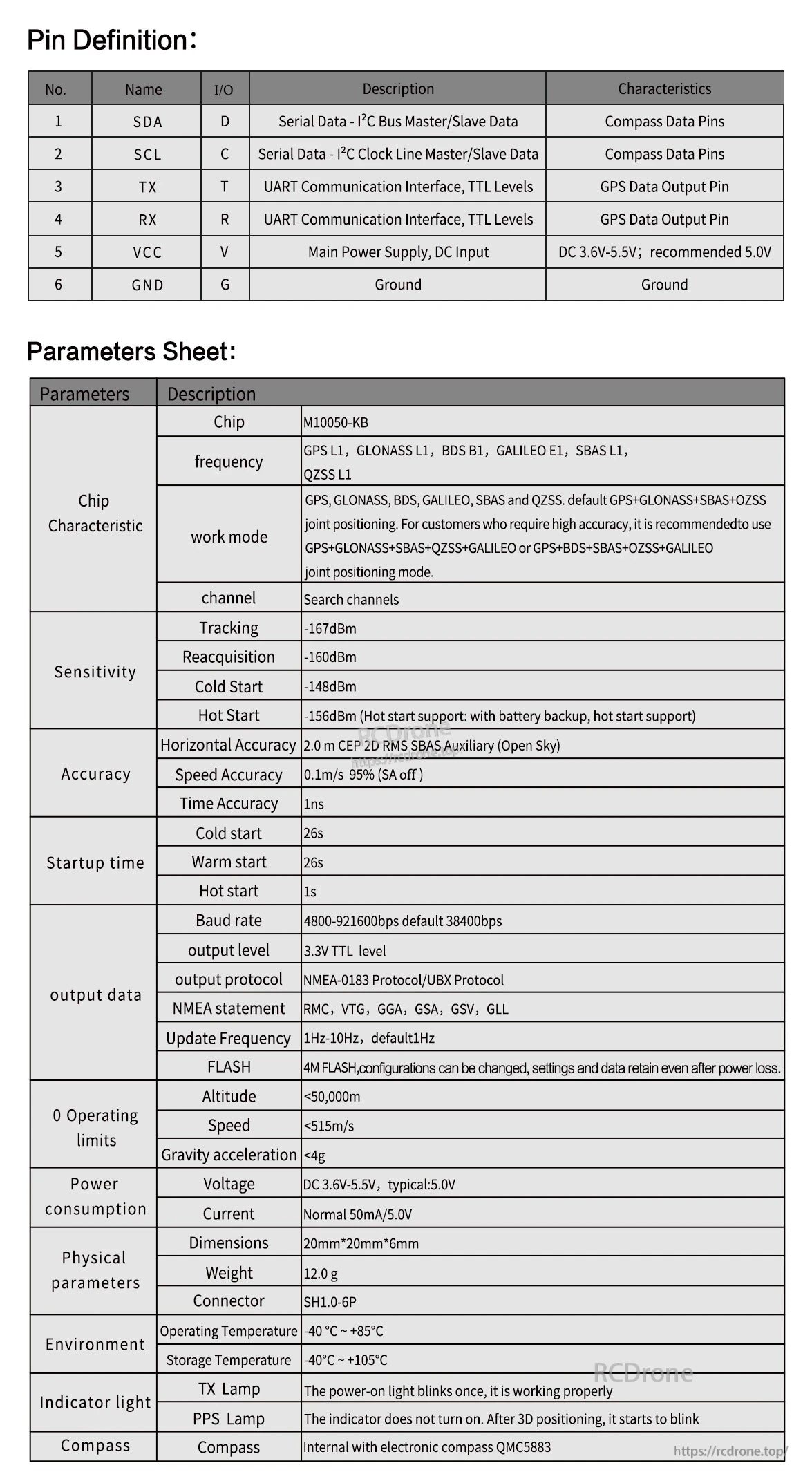
Maelezo ya kiufundi
| Chip | M10050-KB |
| Mifumo ya mawimbi | GPS L1, GLONASS L1, BDS B1, GALILEO E1, SBAS L1, QZSS L1 |
| Njia ya kazi | GPS, GLONASS, BDS, GALILEO, SBAS na QZSS kuweka pamoja. Kiwango cha kawaida GPS+GLONASS+SBAS+QZSS. Kwa usahihi wa juu, tumia GPS+GLONASS+SBAS+QZSS+GALILEO au GPS+BDS+SBAS+QZSS+GALILEO pamoja na upimaji. |
| Uhisabati (Ufuatiliaji / Reacq. / Baridi / Moto) | -167dBm / -160dBm / -148dBm / -156dBm |
| Usahihi wa usawa | 2.0 m CEP 2D RMS (SBAS Msaidizi, Anga Wazi) |
| Usahihi wa kasi | 0.1m/s 95% (SA imezimwa) |
| Usahihi wa muda | 1ns |
| Muda wa kuanzisha (Baridi / Joto / Moto) | 26s / 26s / 1s |
| Kiwango cha baud | 4800–921600bps (kawaida 38400bps) |
| Kiwango cha pato | 3.3V TTL |
| Protokali ya pato | NMEA-0183 / UBX |
| Kauli za NMEA | RMC, VTG, GGA, GSA, GSV, GLL |
| Masafa ya sasisho | 1Hz–10Hz (kawaida 1Hz) |
| FLASH | 4M FLASH; mipangilio inahifadhiwa baada ya kupoteza nguvu |
| Mipaka ya uendeshaji | Kimo <50,000m; Kasi <515m/s; Mwelekeo wa mvutano <4g |
| Voltage | DC 3.6V–5.5V; kawaida 5.0V (lebo ya moduli: Voltage ya Kuingiza 5V) |
| Current | Kawaida 50mA/5.0V |
| Vipimo | 20mm*20mm*6mm (antenna takriban 18mm*18mm) |
| Uzito | 12.0 g |
| Kiunganishi | SH1.0-6P |
| Joto la kufanya kazi | -40°C ~ +85°C |
| Joto la kuhifadhi | -40°C ~ +105°C |
| Ramani ya mwelekeo | Ramani ya kielektroniki ya QMC5883 ndani |
| Mwanga wa onyo | Lampu ya TX: inang'ara mara moja wakati wa kuwasha; lampu ya PPS: inaanza kung'ara baada ya kufunga 3D |
Maelezo ya pini
| Na. | Jina | I/O | Maelezo | Tabia |
| 1 | SDA | D | Data ya Serial - I²C Bus Master/Slave Data | Pins za Data za Compass |
| 2 | SCL | C | Data ya Serial - I²C Clock Line Master/Slave Data | Pins za Data za Compass |
| 3 | TX | T | Interface ya Mawasiliano ya UART, Viwango vya TTL | Pin ya Kutoka ya Data ya GPS |
| 4 | RX | R | Interface ya Mawasiliano ya UART, Viwango vya TTL | Pin ya Kutoka ya Data ya GPS |
| 5 | VCC | V | Chanzo Kikuu cha Nguvu, Ingizo la DC | DC 3.6V–5.5V; inapendekezwa 5.0V |
| 6 | GND | G | Ardhi | Ardhi |
Mpangilio wa pini wa moduli (kama ilivyoandikwa): GND, 5V, RX, TX, SCL, SDA.
Ni Nini Kimejumuishwa
- Moduli ya GPS ya Axisflying M10 yenye kompasu.
- Kiunganishi cha SH1.0-6P na nyaya za rangi nyingi (kama inavyoonyeshwa).
Matumizi
- Frame za FPV freestyle na multirotors za umbali mrefu zinazohitaji uwekaji na mwelekeo wa kuaminika.
- Telemetry na urambazaji kwenye wasimamizi wa ndege wanaounga mkono NMEA/UBX na kompasu ya I2C.
Maelezo ya Usakinishaji
- Sanidi kompasu baada ya kuizima na kabla ya kuruka.
- Toa nguvu ndani ya DC 3.6V–5.5V; kawaida 5.0V.
- Unganisha kulingana na mchoro wa nyaya ili kuzuia uharibifu.
- Tumia BetaFlight v4.3.0 au zaidi (matoleo ya zamani yanaweza kutofanya kazi vizuri na chips za M10).
- Sanidi na antenna ikielekea juu na mbali na motors, nyaya za nguvu na vyanzo vingine vya usumbufu.
Maelezo

Moduli ya GPS ya Axisflying M10 yenye ingizo la 5V, pato la NMEA/UBX. Ina pin za GND, 5V, RX, TX, SCL, SDA. Mwanga wa onyo: TX inawaka wakati wa nguvu; PPS inawaka baada ya kufunga 3D.
M10 GPS yenye chip ya M10050-KB inasaidia GPS, GLONASS, BDS, GALILEO, SBAS, QZSS. Inatoa usahihi wa 2.0m kwa usawa, kasi ya 0.1m/s, na usahihi wa muda wa 1ns. Inatumia 3.6V–5.5V, ukubwa wa 20×20×6mm.

Moduli ya GPS ya Axisflying M10 yenye ingizo la 5V, pato la NMEA/UBX, ukubwa wa 20mm x 20mm. Inajumuisha kupitia GND, 5V, RX, TX, SCL, SDA. Inahitaji kalibrishaji, nguvu sahihi, na mwelekeo wa antenna. Inafaa na BetaFlight v4.3.0+.

Moduli ya GPS ya Axis M10, 20mm x 20mm, yenye antenna ya 18mm. Voltage ya ingizo 5V, protokali za pato NMEA/UBX. Ina pin za GND, 5V, RX, TX, SCL, SDA. Inajumuisha nyaya za rangi nyingi na kiunganishi.Tukutakia safari salama na ya kufurahisha.
Related Collections



