






Kidhibiti cha Drone cha CUAV Pixhawk V6X V2 kwa PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
Kidhibiti cha Drone cha CUAV Pixhawk V6X V2 kwa PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV
Couldn't load pickup availability
Muhtasari
CUAV Pixhawk V6X V2 ni kidhibiti cha drone cha mfululizo wa Pixhawk kilichoundwa kwa ajili ya firmware ya autopilot ya PX4 na ArduPilot. Inafuata kiwango cha Pixhawk FMU v6x na falsafa ya muundo wa moduli, ikiwa na uboreshaji wa viwango vya viwandani vya kugundua redundant, saa ya nje ya joto la kudumu na muundo wa kutolea joto wa MCU, kubadilisha kiwango cha PWM cha 5V/3.3V, na muundo wa kupunguza mshtuko ulio na hati miliki. Moduli ya usimamizi wa nguvu ya PMU 2 Lite inasaidia 70V ingizo na 220A ugunduzi wa sasa.
Vipengele Muhimu
- Kitengo cha floating-point cha usahihi wa mara mbili H7 (STM32H753IIK6); kitengo cha floating-point cha usahihi wa mara mbili cha 480MHz; 2M Flash memory
- Matrix ya IMU ya viwango vya viwanda yenye tofauti tatu za ziada na muundo wa basi na usambazaji wa nguvu huru (IIM-42652, BMI088, ICM-45686)
- Barometer ya ziada ya pamoja ya mara mbili (BMP581, ICP-20100)
- Mfumo wa kunyonya mshtuko wa msingi wenye axisi tatu (X, Y, Z) za kunyonya mshtuko; muundo wa msaada wa pembe nne ulioelekezwa; aina mpya ya nyenzo za kunyonya mshtuko
- Kompas ya magnetic ya kiwango cha magari RM3100 kwa kukataa ushawishi wa magnetic wenye nguvu
- Urekebishaji wa saa ya kioo ya nje ya IMU (inayotumika pamoja na saa ya nje ya joto thabiti ya usahihi wa juu ili kupunguza makosa ya ODR na kuboresha hisia na usawazishaji)
- Mfumo wa kudhibiti joto thabiti: silicone ya kuhamasisha joto na urekebishaji wa joto wa IMU ili kupunguza mabadiliko yanayohusiana na joto
- Programu inayoweza kubadilika kati ya 5V na 3.3V PWM kiwango cha pato
- Kiunganishi cha Ethernet cha 100 Mbps kilichojumuishwa kwa usawazishaji wa data wa kasi na vifaa kama vile kompyuta za misheni na kamera za upimaji
- Inasaidia boot salama na huduma za sasisho la firmware salama
- Muundo wa usambazaji wa nguvu wa multi-redundant; inasaidia pembejeo ya CAN PMU ya channel 2; inajumuisha PMU 2 Lite kama kiwango
- Shimo za kufunga chini zimeongezwa kwa kufunga moja kwa moja kwa screws; mashimo ya kufunga yanayofaa na screws za kiwango cha M2
Maelezo
| Processor | STM32H753IIK6 |
| Coprocessor | STM32F103 |
| Toleo | Pixhawk V6XV2 |
| CPU / kumbukumbu (iliyotajwa) | 480MHz kitengo cha floating-point cha usahihi wa mara mbili; kumbukumbu ya Flash ya 2M |
| Accelerometer & gyroscope | IIM-42652; BMI088; ICM-45686 |
| Compass | RM3100 |
| Barometer | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Kiwango cha PWM | 3.3V / 5V (kuhamasisha kwa programu) |
| Nishati | 2 (mifumo 2 ya nguvu ya CAN) |
| Bandari ya GPS | 2 (GPS1: kiunganishi cha GPS chenye I2C na swichi ya usalama; GPS2: kiunganishi chenye I2C na GPS) |
| Bandari ya TELEM | 3 |
| Bus ya CAN | 2 |
| PPM RC | 1 (ingizo maalum kwa mpokeaji wa PPM) |
| SBUS/DSM/RSSI | 2 (1 ingizo la SBUS/DSM/Spektrum; 1 analog 3.3V/PWM input) |
| SBUS outs | 1 |
| FMU debug | 1 |
| IO debug | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI external 1 | 1 (SP16 interface for external sensor expansion) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB port | 2 (Type-C x1; GH interface x1 for USB external connection) |
| Kadi ya TF | 1 |
| Moduli ya nguvu | Standard PMU 2 Lite (toleo la 5V), voltage ya kuingiza: 12-70V |
| Voltage ya kufanya kazi | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Nguvu: 4.85-5.45V |
| Joto la kufanya kazi | -20 hadi 85C |
| Ukubwa | 45 x 85.1 x 29.2 mm |
| Uzito | Kidhibiti: 97.9g; Kituo: 43.1g; Bodi ya kubeba (ikiwemo viscrew): 54.8g |
| Kumbukumbu ya kufunga (maandishi ya mchoro) | Shimo za kufunga zinazofaa na viscrew vya kiwango cha M2; vipimo vilivyoonyeshwa: 72 mm; 22.50 mm; 24 mm |
Ni Nini Imejumuishwa
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V Moduli ya Nguvu x1
- PMU 2 Lite-5V Header Power Cable (X7+ (V6X) Toleo), urefu wa waya: 25cm x1
- CAN/I2C Bodi ya Kupanua x1
- Kadi ya Kumbukumbu ya TF x1
- Kebo ya Type-C, urefu wa waya: 100cm x1
- Kebo ya DSM RC, urefu wa waya: 30cm x1
- Kebo ya SBUS RC, urefu wa waya: 30cm x1
- Kebo ya PPM RC/SBUS OUT, urefu wa waya: 30cm x1
- Kebo ya Ethernet, urefu wa waya: 40cm x1
- Kebo ya CAN, urefu wa waya: 30cm x1
- Kebo ya TELEM, urefu wa waya: 30cm x1
- Kebo ya UART 4, urefu wa waya: 30cm x1
- UART4 -> Kebo ya I2C, urefu wa waya: 30cm x1
- Kebo ya ADIO, urefu wa waya: 30cm x1
- Kebo ya Debug, urefu wa waya: 10cm x1
- Kebo ya USB -> Type-C Female Connector Extension, urefu wa waya: 50cm x1
- 3M Pande Mbili x2
Maombi
- Inafaa na ArduPilot na PX4
- Inasaidia multi-rotor, ndege zisizohamishika, VTOL ndege zisizohamishika, helikopta zisizo na rubani, magari yasiyo na rubani, na meli zisizo na rubani (submersibles)
- Kusawazisha data ya Ethernet kwa kasi kubwa na kompyuta za misheni na vifaa vingine vya ndani vinavyoungwa mkono
Kwa ukaguzi wa ufanisi na maswali ya usanidi, wasiliana na [email protected] au tembelea https://rcdrone.top/.
Video
Maelezo

Kidhibiti cha ndege cha Pixhawk V6X V2 kinatumia processor ya H7 na ina orodha ya IMU yenye redundansi tatu, barometer mbili, na kompas ya RM3100 yenye muundo wa kupunguza mshtuko.

Pixhawk V6X V2 inatumia processor ya STM32H753IIK6 H7 kusaidia mipangilio ya udhibiti wa ndege inayotegemea PX4 na ArduPilot.

Pixhawk V6X V2 inatumia mtego wa kupunguza mshtuko wa axisi tatu (X, Y, Z) wenye msaada wa pembe nne ili kusaidia kupunguza mtetemo na kelele.
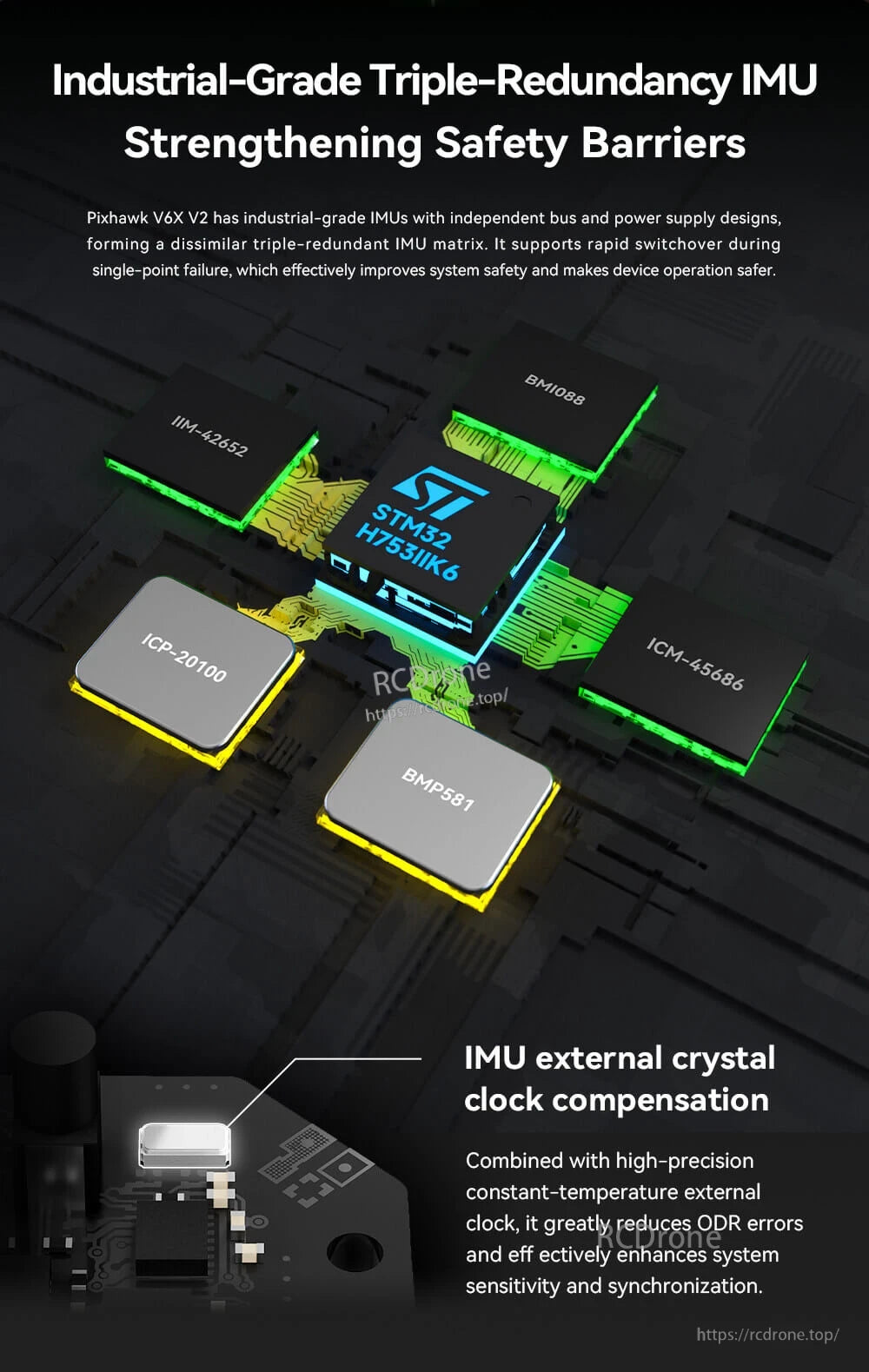
Muundo wa kidhibiti cha ndege cha Pixhawk V6X V2 una kipengele cha IMU yenye redundansi tatu kuzunguka STM32H753IIK6, pamoja na fidia ya saa ya kioo ya nje kwa usahihi wa sensorer.

Pixhawk V6X V2 inajumuisha magnetometer ya kiwango cha magari ya RM3100 na inasaidia uamuzi wa mwelekeo wa GPS kwa mwelekeo na urambazaji thabiti zaidi.
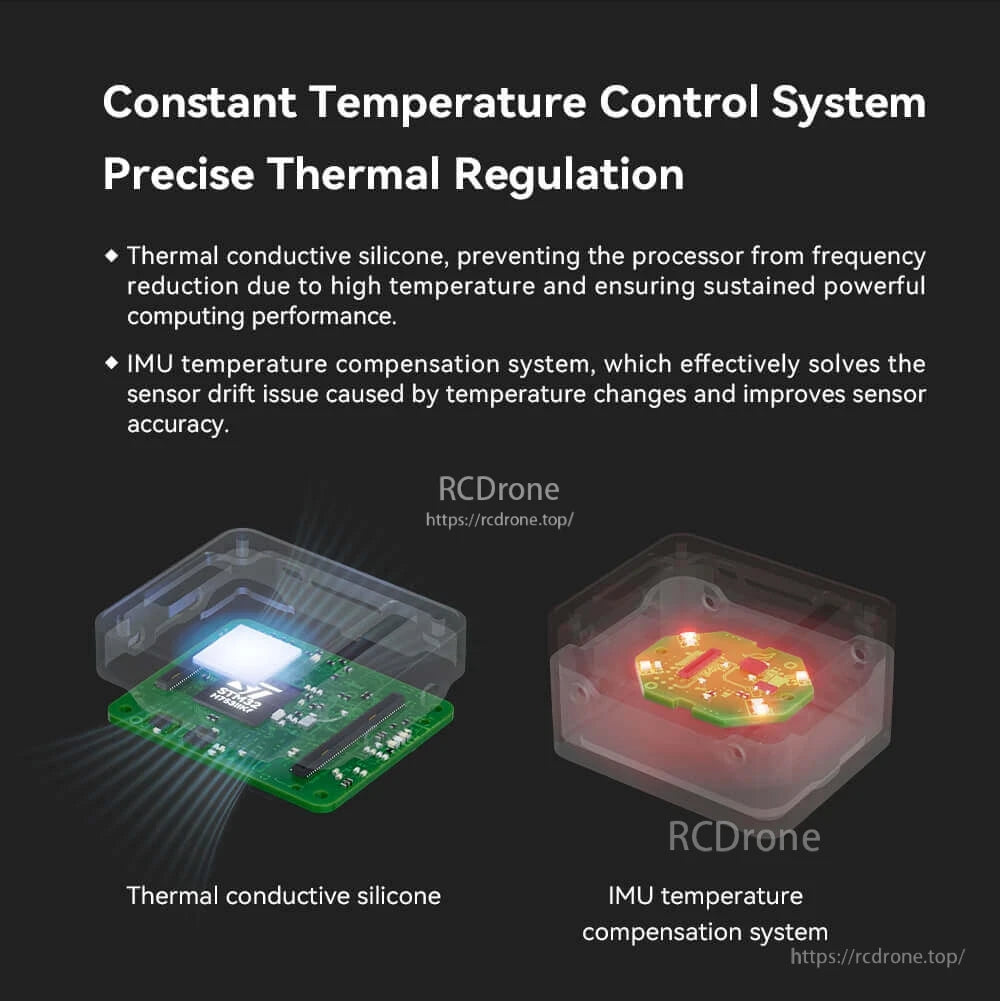
Mfumo wa kudhibiti joto wa kudumu unatumia silicone ya kuhamasisha joto na fidia ya joto ya IMU kupunguza mabadiliko yanayohusiana na joto.
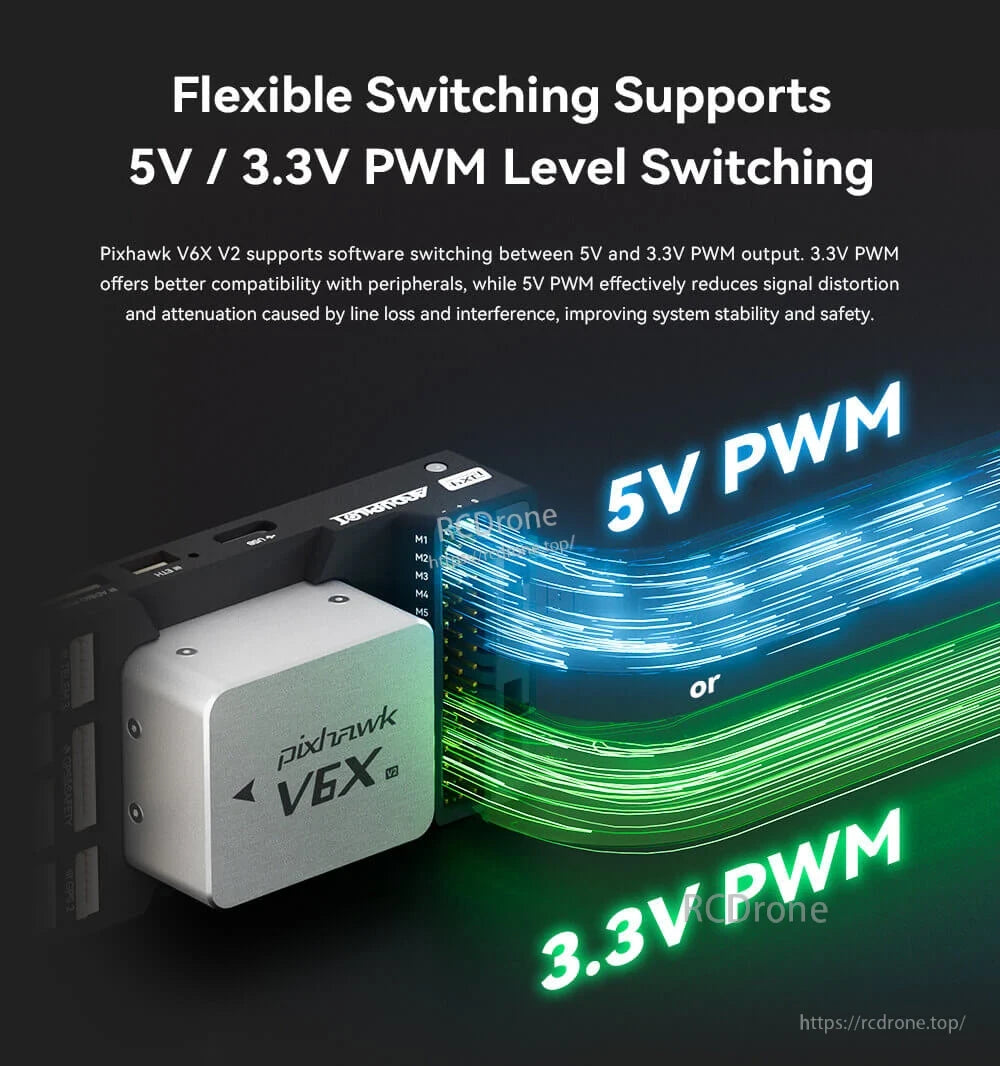
Pixhawk V6X V2 inasaidia kubadilisha kwa urahisi kati ya viwango vya pato vya 5V na 3.3V PWM kwa urahisi wa ulinganifu na vifaa tofauti.

Pixhawk V6X V2 inajumuisha kiunganishi cha Ethernet cha 100 Mbps pamoja na bandari zilizoandikwa kama USB, TELEM3, CAN, na GPS & Usalama wa wiring safi.
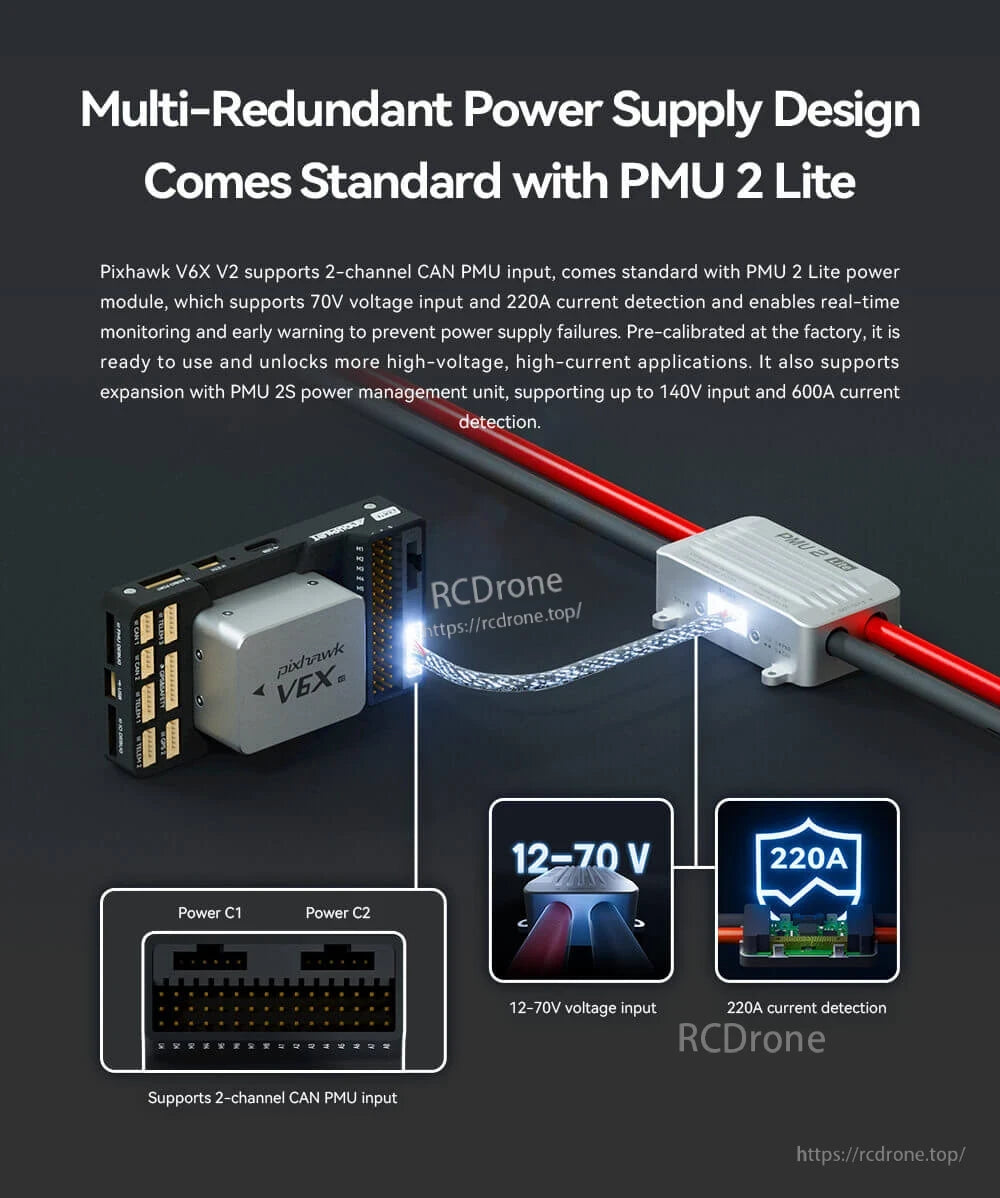
Pixhawk V6X V2 inashirikiana na moduli ya PMU 2 Lite kwa pembejeo za nguvu nyingi, ikisaidia 12–70V na ugunduzi wa sasa wa 220A.

CUAV Pixhawk V6X V2 inatumia moduli ya msingi inayoweza kutolewa kwenye bodi ya kubeba ili kurahisisha usanidi na ufikiaji wa kiunganishi.
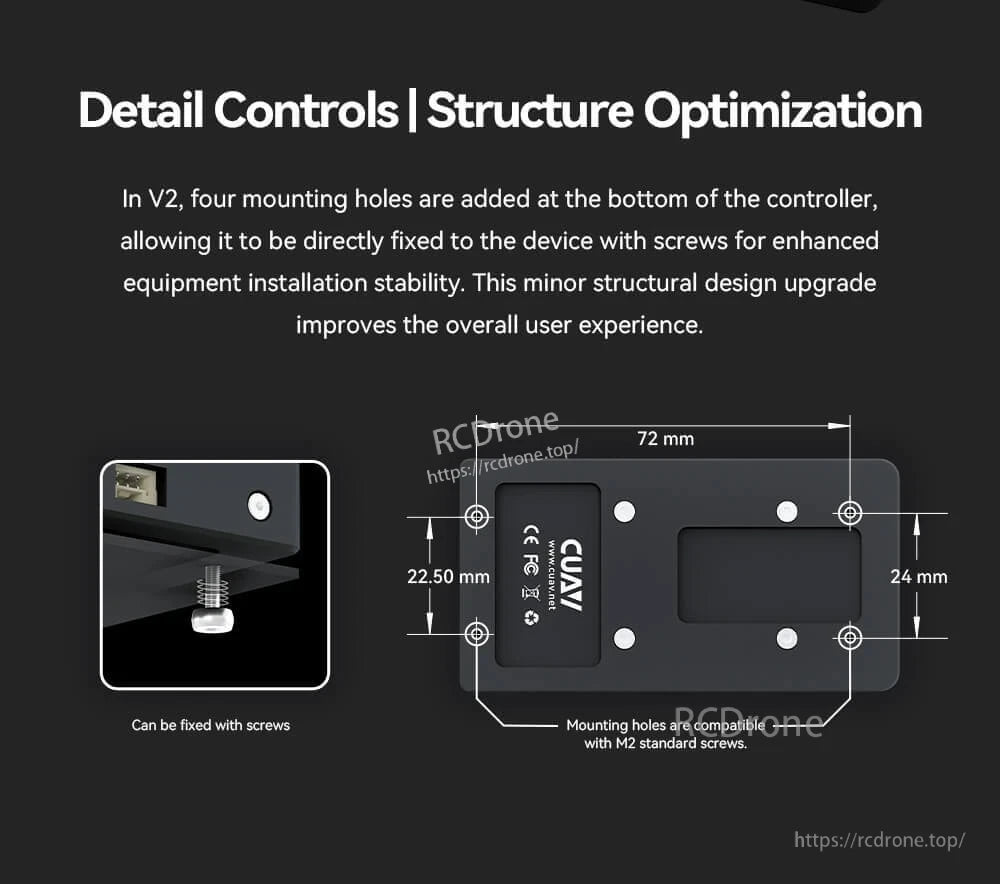
CUAV Pixhawk V6X V2 inaongeza mashimo manne ya chini yanayofaa M2 yenye ukubwa wa 72 mm kwa usakinishaji wa screws ulio salama zaidi.

Pixhawk V6X V2 inasaidia ArduPilot na PX4 firmware kwa anuwai ya majukwaa yasiyo na rubani ikijumuisha multirotors, ndege za mpigo, na magari ya ardhini au baharini.
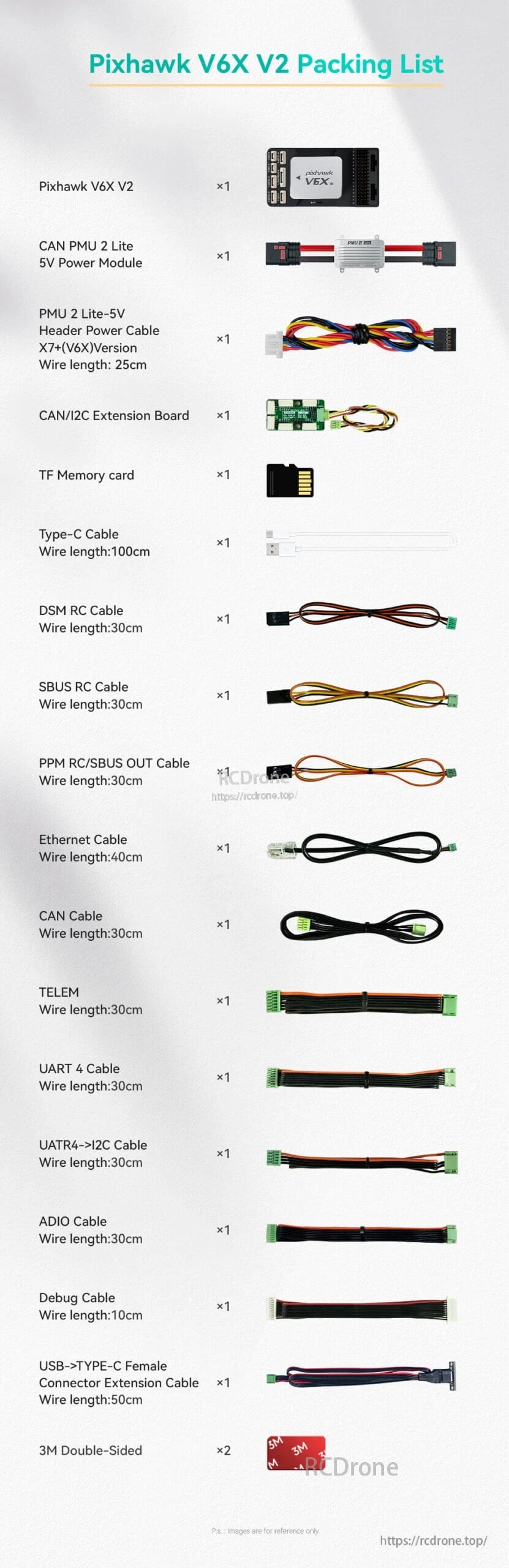
Kit ya Pixhawk V6X V2 inajumuisha kiongozi wa ndege, moduli ya nguvu ya CAN PMU 2 Lite 5V, kadi ya kumbukumbu ya TF, na seti ya nyaya za Aina-C, RC, Ethernet, CAN, TELEM, UART, ADIO, na debug.
Related Collections


















