








CUAV X25 EVO Kidhibiti cha Ndege - STM32H7, IMU Tatu, Baro Mbili, RM3100, CAN, PWM 16, PX4/ArduPilot
CUAV X25 EVO Kidhibiti cha Ndege - STM32H7, IMU Tatu, Baro Mbili, RM3100, CAN, PWM 16, PX4/ArduPilot
CUAV
Couldn't load pickup availability
Muhtasari
CUAV X25 EVO ni kidhibiti cha msingi chenye uaminifu wa juu kwa mifumo isiyo na rubani. Kinachanganya processor ya STM32H7 (480 MHz, 2 MB Flash) na array ya IMU ya viwango vya viwanda vitatu, baromita mbili, na magnetometers ya RM3100. Muundo mpya wa nguvu unasaidia 10–18 V ingizo na kutoa hadi 5 V/12 A pato la nje ili kuendesha mizigo mizito. Kidhibiti kinajumuisha upungufu wa nguvu wa njia mbili, ulinzi wa kina wa ESD/over-current, onyesho la hali la RGB, na muundo wa CORE/muundo wa kubebea. Inafaa na ArduPilot na PX4, na inafaa kwa multirotors, ndege zenye mabawa, VTOL, helikopta, UGV/USV/UUV na majukwaa mengine.
Vipengele Muhimu
-
Uhesabuji wa utendaji wa juu: STM32H7 @ 480 MHz, 2 MB Flash; matumizi ya chini ya CPU kwa ajili ya algorithimu za juu (navigesheni isiyo na GPS, filters za FFT, scripts za LUA).
-
Seti ya sensor za viwandani:
-
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnetometers: PNI RM3100 (anti-interference).
-
Barometers: TDK ICP20100 & Bosch BMP581 (dual).
-
Matrix ya IMU isiyo na homogeneity yenye kubadilisha kwa uvumilivu wa makosa.
-
-
Mfumo wa fidia ya joto mara mbili kwa IMU: fidia ya wakati halisi ±0.5 °C; ikilinganishwa na kizazi kilichopita—15% chini ya mabadiliko ya joto, 25% bora katika uthabiti wa suluhisho la mwelekeo.
-
Uondoaji wa mtetemo: kizazi cha 4 cha damping ya nylon yenye mwelekeo wa simetriki; chaguo la isolators za sikio za nje ili kupunguza mtetemo wa juu wa kawaida na kuboresha uaminifu wa data.
-
Muundo wa nguvu: ndani 5 V/15 A DC-DC yenye nguvu; bandari ya nje inasaidia 5 V/12 A pato; anuwai ya ingizo 10–18 V.
-
Mitandao &na mabasi: CAN bus (betri smart/ESC/servos, mrejesho wa telemetry) + 100 M Ethernet.
-
I/O nyingi: hadi 16 PWM kupitia bandari za servo; hadi 32 PWM kupitia upanuzi wa CAN.
-
Uthibitishaji &na QA: upungufu wa nguvu wa njia mbili, ulinzi wa ESD &na juu ya sasa, muundo wa kiunganishi usio na umeme, mipako ya PCB inayofaa, na upimaji wa kiotomatiki kabisa.
-
Kiashiria cha hali ya RGB: LED za rangi nyingi kwa ajili ya kujiandaa, nguvu, GNSS/nafasi, hali za hitilafu, nk.
html
Specifikesheni
| Kategoria | Maelezo |
|---|---|
| Processor | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash |
| Toleo | X25 EVO |
| IMUs | IIM-42653 ×2 (gyro ±4000 °/s; accel ±32 g); IIM-42652 ×1 (gyro ±2000 °/s; accel ±16 g) |
| Magnetometer | RM3100 |
| Barometers | TDK ICP20100 / Bosch BMP581 (dual) |
| PWM matokeo | 16 (servo bank M1–M16) |
| Nguvu ingizo (CAN) | 2 |
| Bandari za GPS | 2 |
| Bandari za TELEM | 2 |
| UART4 | 1 |
| Ingizo la RC | 1 (PPM / SBUS / DSM n.k.) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (jumla 5) |
| SPI6 upanuzi | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Aina-C |
| I²C | 3 |
| RSSI | 1 |
| Moduli ya nguvu | PMU 2 Lite |
Operating Conditions &na Kimaumbile
| Item | Thamani |
|---|---|
| Voltage ya kuingiza (kikontroli) | 10–18 V |
| USB | 4.75–5.25 V |
| PMU 2 Lite upeo wa usambazaji | 20–70 V |
| Upeo wa 5 V wa nje | hadi 12 A pato (kwa vifaa vya ziada/mizigo mizito) |
| Joto la kufanya kazi | −20 °C hadi +85 °C |
| Vipimo | 76.5 × 45.45 × 32.2 mm |
| Uzito | 110 g |
Interfaces &na Mambo Muhimu ya Mpangilio
-
Mbili POWER C1/C2 rails, RC IN, M1–M16 benki ya servo.
-
Viunganishi vya upande kwa UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
-
CORE iliyoundwa ambayo inaweza kutolewa kwa ajili ya kuendeleza bodi ya kubeba maalum.
Ulinganifu &na Maombi
-
Firmware: inafaa kabisa na ArduPilot na PX4 (madereva &na vipengele).
-
Magari: multirotor, ndege zisizofanya kazi, VTOL, helikopta, UGV, USV, UUV/submersible, na majukwaa mengine yasiyo na rubani.
Katika Sanduku (X25 EVO Kit)
-
X25 EVO kidhibiti cha ndege × 1
-
Moduli ya nguvu ya CAN PMU2 Lite (15 V) × 1
-
Bodi ya upanuzi ya CAN × 1
-
Nyaya za data za CAN (35 cm) × 2
-
Nyaya ya USB Type-C (100 cm) × 1
-
Nyaya za TELEM (30 cm) × 2
-
Nyaya ya RSSI (22 cm) × 1
-
Nyaya ya RC IN (30 cm) × 1
-
Nyaya ya nguvu ya CAN PMU2 Lite 15 V smart controller (30 cm) × 1
Maelezo

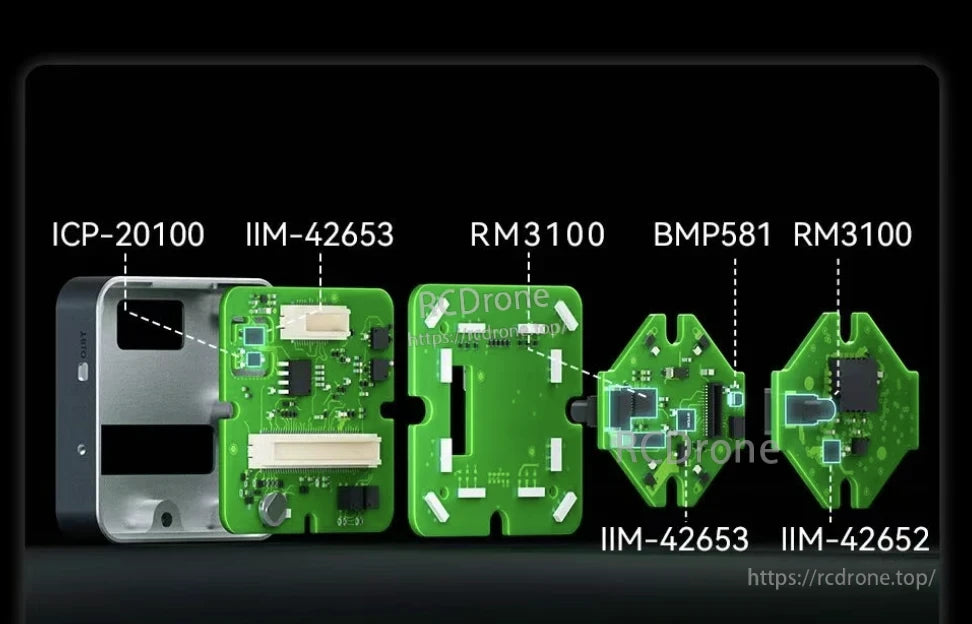
Vifaa vya kidhibiti cha ndege vya CUAV X25 EVO vilivyotambuliwa na mifano ya chip.


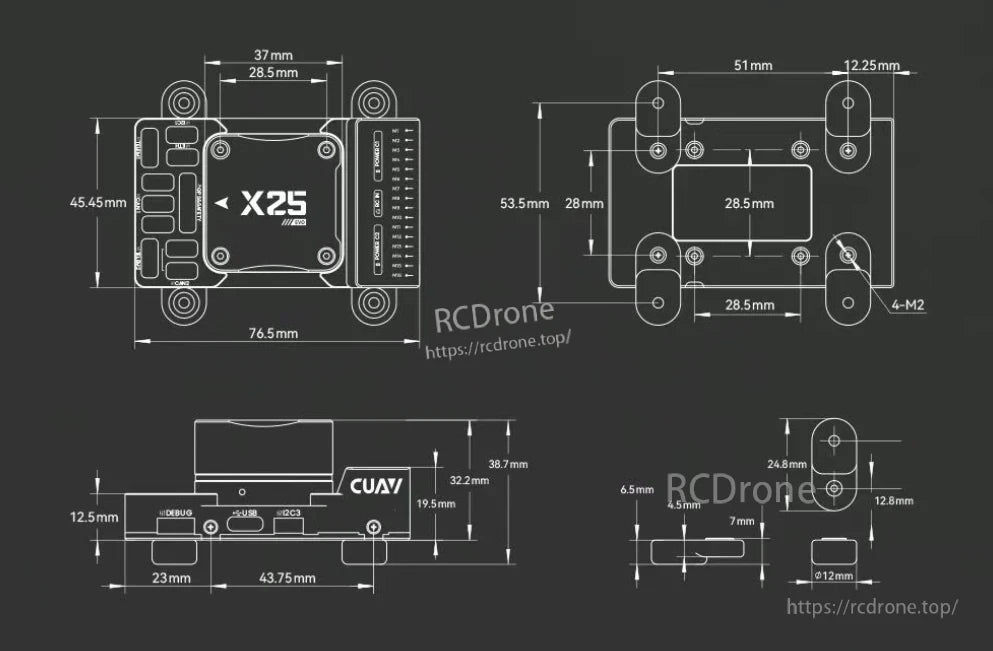
Kidhibiti cha ndege cha CUAV X25 EVO kina vipimo vya 76.5mm x 45.45mm, kina bandari za debug, USB, na I2C3, na kinajumuisha screws nne za M2 kwa ajili ya usakinishaji salama.

X25 EVO Autopilot inajumuisha kidhibiti cha ndege, moduli ya nguvu, bodi ya upanuzi ya CAN, nyaya za data na telemetry, nyaya za Type-C, nyaya za RSSI na RC IN, na laini ya usambazaji wa nguvu.
Related Collections








