






CubeMars AK10-9 V2.0 Kitendaji cha Roboti KV60/KV100 | 18Nm/15Nm Nguvu ya Mzunguko, Kienkoda Mbili, Njia za MIT & Servo
CubeMars AK10-9 V2.0 Kitendaji cha Roboti KV60/KV100 | 18Nm/15Nm Nguvu ya Mzunguko, Kienkoda Mbili, Njia za MIT & Servo
CubeMars
Couldn't load pickup availability
Muhtasari
CubeMars AK10-9 V2.0 ni actuator ya roboti iliyounganishwa kwa kiwango cha juu ambayo inachanganya motor ya BLDC yenye utendaji wa juu, reducer ya sayari, encoders mbili, na dereva iliyounganishwa katika kitengo kimoja kidogo. Inasaidia hali ya nguvu ya MIT na hali ya udhibiti wa servo wa viwandani, inatoa matokeo ya torque laini, uwekaji sahihi, na majibu ya haraka, na kuifanya kuwa bora kwa roboti zenye miguu, exoskeletons, na AGVs. Inapatikana katika toleo la KV60 na KV100, inatoa hadi 48Nm ya torque ya kilele, ikiwa na kuondoa joto iliyoboreshwa na uangalizi wa joto wa wakati halisi kwa uaminifu wa muda mrefu.
Vipengele Muhimu
-
Modes Mbili za Udhibiti: Inasaidia kubadilisha bila mshono kati ya hali ya nguvu ya MIT na hali ya udhibiti wa servo kwa udhibiti wa mwendo wa kubadilika.
-
Matokeo ya Torque ya Juu: Hadi 48Nm torque ya kilele na uendeshaji thabiti na backlash ndogo (0.33°).
-
Imara Sana: Inachanganya motor, encoder, dereva, na reducer ya sayari katika mfumo mmoja wa kompakt.
-
Matokeo & Encoders za Ndani: Encoders za magnetic 14-bit za ndani na 15-bit za nje zilizounganishwa zinahakikisha mrejesho sahihi.
-
V Bearing za Roller zilizovuka: Inaboresha upinzani wa mzigo wa axial na radial, ikiboresha uaminifu katika matumizi ya dinamik.
-
Sensor ya Joto Ndani: Ufuatiliaji wa joto wa wakati halisi unazuia uharibifu wa motor chini ya msongo wa joto.
-
Uondoaji wa Joto ulioimarishwa: Muundo wa kipekee unaboresha usimamizi wa joto, ukihakikisha uendeshaji thabiti wa muda mrefu.
-
Uendeshaji wa Kimya: Kiwango cha kelele chini kama 65 dB katika 65cm (toleo la KV60).
Maelezo ya Kiufundi
Maelezo ya AK10-9 V2.0 K60
| Matumizi | Roboti yenye miguu, Exoskeleton, AGV | Torque ya kilele (Nm) | 48 |
| Njia ya kuendesha | FOC | Current ya kilele (ADC) | 29.8 |
| Joto la mazingira ya uendeshaji | -20℃~50℃ | Kv (rpm/V) | 60 |
| Aina ya winding | nyota | Kt (Nm/A) | 0.198 |
| Daraja la insulation | C | Ke (V/krpm) | 17.2 |
| Insulation ya Voltage Kuu | 1000V 5mA/2s | Upinzani wa Awamu hadi Awamu (mΩ) | 195 |
| Upinzani wa Insulation | 1000V 10MΩ | Inductance ya Awamu hadi Awamu (μH) | 181 |
| Awamu | 3 | Inertia (gcm²) | 1002 |
| Jozi za Mipole | 21 | Km (Nm/√W) | 0.45 |
| Uwiano wa Kupunguza | 9:1 | Wakati wa Kihandisi (ms) | 0.5 |
| Dereva wa Nyuma (Nm) | 0.8 | Wakati wa Umeme (ms) | 0.93 |
| Backlash (°) | 0.33 | Uzito (g) | 960 |
| Sensor wa joto | NTC MF51B 103F3950 | Uwiano wa torque wa juu (Nm/kg) | 50 |
| Kelele dB 65CM mbali na motor | 65 | Kiunganishi cha CAN | A1257WR-S-4P |
| Viwango vya mzigo wa msingi (dyn. C ) N | 2000 | Kiunganishi cha UART | A1257WR-S-3P |
| Viwango vya mzigo wa msingi (stat.C0) N | 2520 | Kiunganishi cha nguvu | XT30PW-M |
| Voltage iliyokadiriwa (V) | 24/48 | Aina ya encoder ya mzunguko wa ndani | Encoder ya magnetic |
| Torque iliyokadiriwa (Nm) | 18 | Azimio la encoder ya ring ya ndani | 14bit |
| Speed iliyokadiriwa (rpm) | 109/228 | Aina ya encoder ya ring ya nje | Encoder ya magnetic |
| Current iliyokadiriwa (ADC) | 10.6 | Azimio la encoder ya ring ya nje | 15bit |
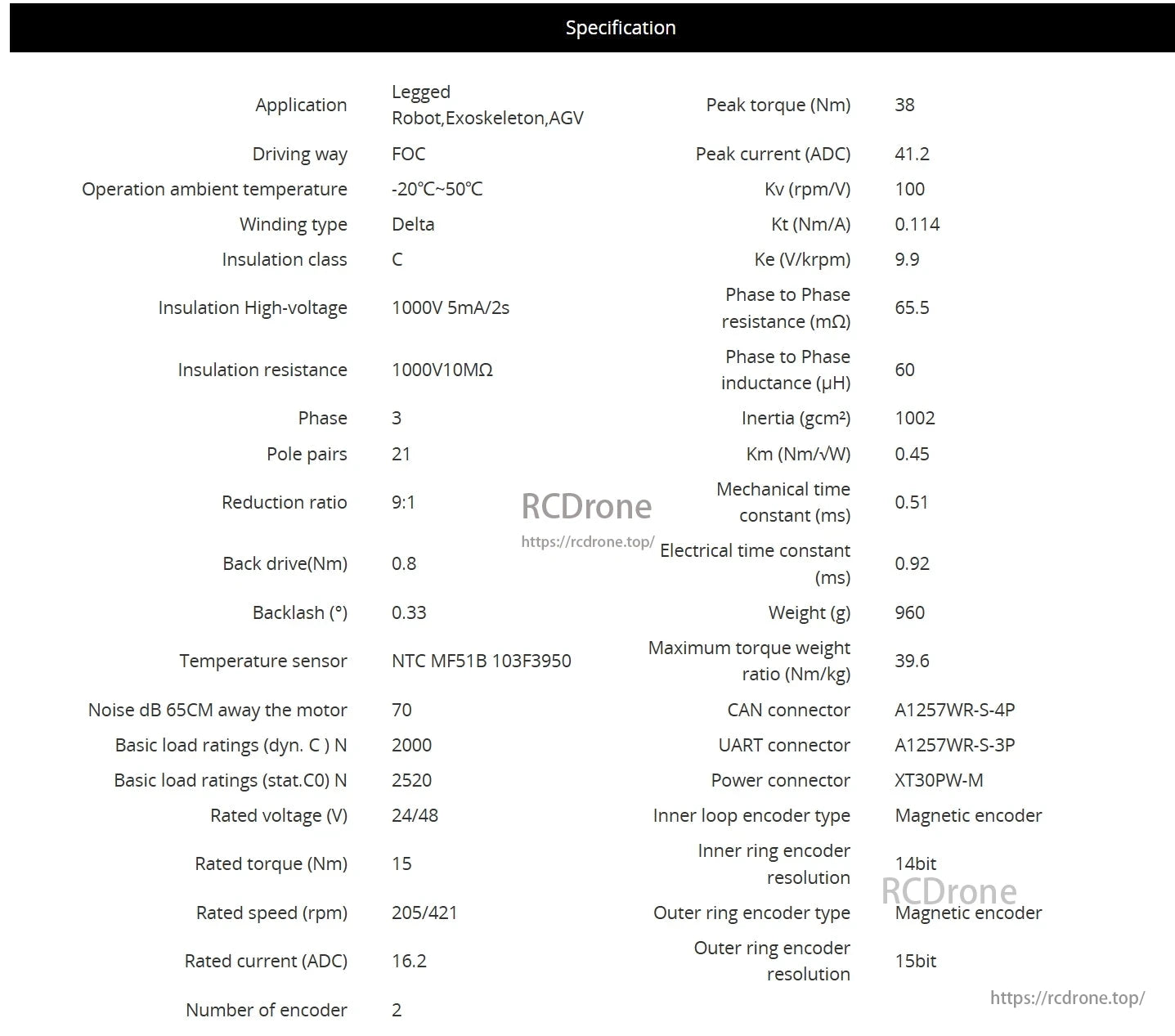
AK10-9 V2.0 KV100 Specifications
| Maombi | Roboti yenye miguu, Exoskeleton, AGV | Torque ya juu (Nm) | 38 |
| Njia ya kuendesha | FOC | Current ya juu (ADC) | 41.2 |
| Joto la mazingira ya uendeshaji | -20℃~50℃ | Kv (rpm/V) | 100 |
| Aina ya winding | Delta | Kt (Nm/A) | 0.114 |
| Daraja la insulation | C | Ke (V/krpm) | 9.9 |
| Insulation ya Voltage ya juu | 1000V 5mA/2s | Upinzani wa Awamu hadi Awamu (mΩ) | 65.5 |
| Upinzani wa insulation | 1000V10MΩ | Inductance ya Awamu hadi Awamu (μH) | 60 |
| Awamu | 3 | Inertia (gcm²) | 1002 |
| Jozi za nguzo | 21 | Km (Nm/√W) | 0.45 |
| Uwiano wa kupunguza | 9:1 | Muda wa kiufundi wa mitambo (ms) | 0.51 |
| Back drive(Nm) | 0.8 | Muda wa kiufundi wa umeme (ms) | 0.92 |
| Backlash (°) | 0.33 | Uzito (g) | 960 |
| Sensor ya joto | NTC MF51B 103F3950 | Uwiano wa torque wa juu zaidi (Nm/kg) | 39.6 |
| Kelele dB 65CM mbali na motor | 70 | Kiunganishi cha CAN | A1257WR-S-4P |
| Viwango vya mzigo wa msingi (dyn. C) N | 2000 | Kiunganishi cha UART | A1257WR-S-3P |
| Viwango vya mzigo wa msingi (stat.C0) N | 2520 | Kiunganishi cha nguvu | XT30PW-M |
| Voltage iliyopangwa (V) | 24/48 | Aina ya encoder ya mzunguko wa ndani | Encoder ya magnetic |
| Torque iliyopangwa (Nm) | 15 | Azimio la encoder ya ring ya ndani | 14bit |
| Speed iliyopangwa (rpm) | 205/421 | Aina ya encoder ya ring ya nje | Encoder ya magnetic |
| Current iliyopangwa (ADC) | 16.2 | Azimio la encoder la pete ya nje | 15bit |
| Idadi ya encoder | 2 |
Maombi
-
Roboti zenye miguu ya bionic
-
Exoskeletons kwa ajili ya Urekebishaji au Kubeba Mizigo
-
Magari ya Ardhi ya Kujitegemea (AGV)
-
mifumo ya Kudhibiti Torque ya Pamoja
-
Roboti za Binadamu na Nne za Miguu
Pakua
![]() Mwongozo wa Dereva na Udhibiti wa AK Series v1.0.15.X.pdf
Mwongozo wa Dereva na Udhibiti wa AK Series v1.0.15.X.pdf
Maelezo
CubeMars AK10 Robotic Actuator: 38 Nm torque ya kilele, 41.2 ADC peak current, -20°C hadi 50°C operesheni, 9:1 uwiano wa kupunguza, uzito wa 960g, 39.6 Nm/kg uwiano wa max torque-weight, kelele ya 70 dB, encoders za magnetic, viunganishi vya CAN na UART.

CubeMars AK10 Robotic Actuator: 48 Nm peak torque, 29.8 A peak current, -20°C hadi 50°C operesheni, insulation ya 1000V, awamu 3, jozi 21 za pole, 9:1 uwiano wa kupunguza, uzito wa 960g, 50 Nm/kg max torque weight ratio, encoders za magnetic.

Chati ya Uchambuzi kwa CubeMars AK10-9 V2.0 KV60@48VDC actuator. Inaonyesha nguvu ya pato (W), ufanisi, sasa (A), na kasi (RPM) dhidi ya torque (N.m). Ufanisi unafikia kilele karibu na 12 N.m, wakati nguvu ya pato inaongezeka kwa kasi na torque. Sasa inaongezeka kwa mstari, na kasi inapungua kadri torque inavyoongezeka. Chati inaonyesha sifa za utendaji za actuator, ikionyesha uwezo wake chini ya mizigo tofauti.Metriki muhimu ni pamoja na nguvu ya juu ya pato inayozidi 800 W na kasi ya uendeshaji hadi 350 RPM kwa torque za chini. Takwimu hizi zinasaidia kuelewa ufanisi wa actuator na nguvu katika matumizi mbalimbali.
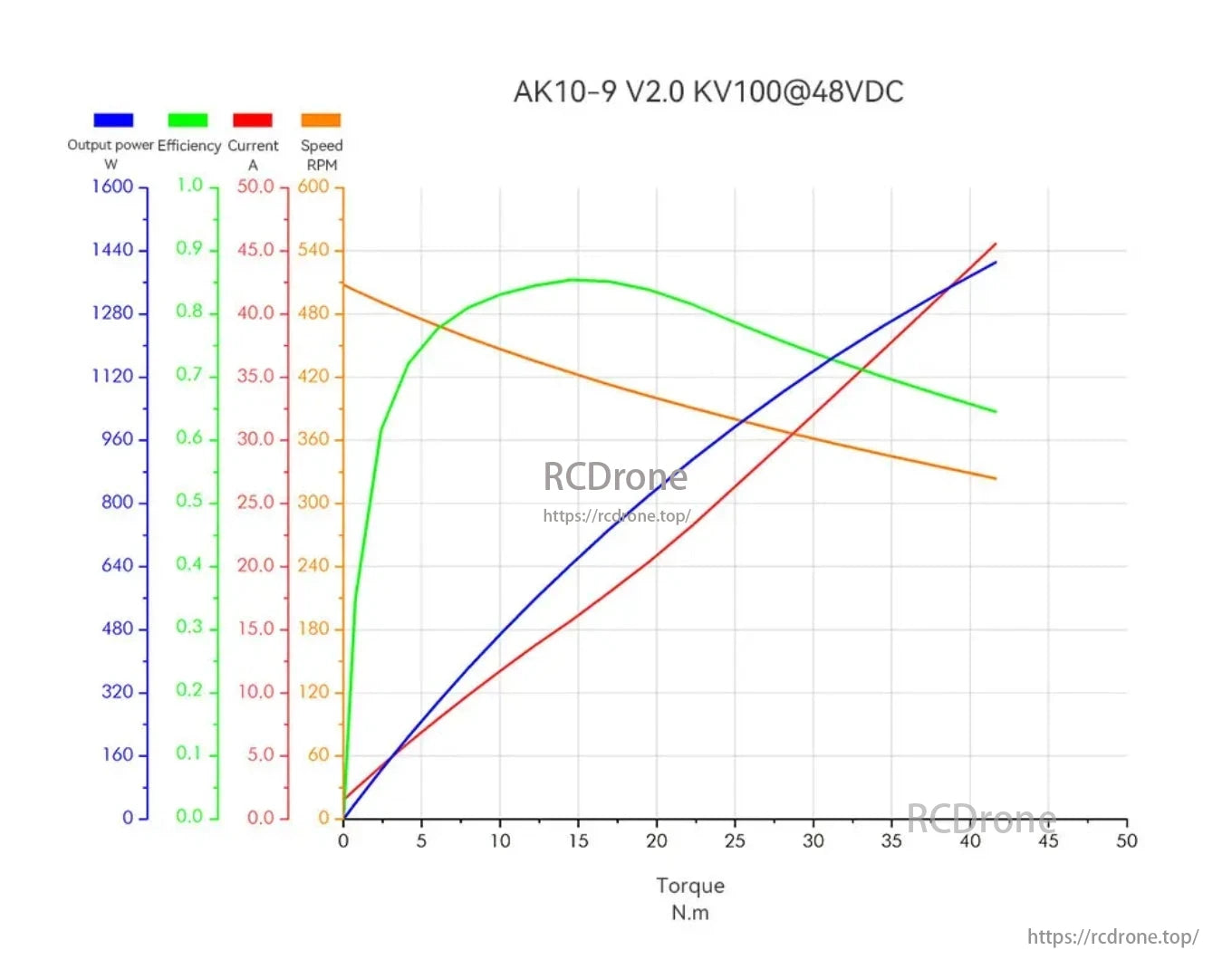
Utendaji wa CubeMars AK10-9 V2.0 KV100@48VDC actuunaoonyeshwa. Nguvu ya pato (W), ufanisi, sasa (A), na kasi (RPM) zimepangwa dhidi ya torque (N.m). Ufanisi unafikia kilele karibu na 15 N.m, wakati nguvu ya pato inaongezeka kwa mstari na torque. Sasa pia inaongezeka kwa kasi na torque. Kasi inapungua kadri torque inavyoongezeka, ikianza kwa takriban 480 RPM kwa torque sifuri. Grafu inaonyesha pointi bora za uendeshaji kwa matumizi mbalimbali, ikionyesha uwezo wa actuator chini ya hali tofauti za mzigo. Takwimu hizi zinasaidia katika kuchagua mipangilio inayofaa kwa kazi maalum.

CubeMars AK10-9 KV60 servo ya nguvu iliyounganishwa, njia zilizojumuishwa. Actuator ya roboti yenye FCC, CE, RoHS V2.0 cheti.

Robotic Actuator inatoa udhibiti mzuri wa motor, hali sahihi ya nguvu, na majibu ya haraka kwa matumizi ya viwandani.

CubeMars AK10 Robotic Actuator inajumuisha motor ya BLDC yenye utendaji wa juu, bearing ya roller iliyovuka ya kiwango cha viwanda, sensor ya joto, encoder ya pato, hali ya udhibiti mara mbili, na reducer ya sayari kwa torque thabiti.

Boreshaji muundo na mionzi ya joto haraka. Pandisha uhamasishaji wa joto wa ganda la motor kwa muda mrefu na utulivu wa utendaji wa moduli ya kuendesha. SN: 1010921081.
Related Collections






