



CubeMars G100 KV10 Motor ya Gimbal 24V 3Nm 7.7Nm Kilele Shimo Kubwa la Kati Nguvu Kubwa kwa Gimbal Radar
CubeMars G100 KV10 Motor ya Gimbal 24V 3Nm 7.7Nm Kilele Shimo Kubwa la Kati Nguvu Kubwa kwa Gimbal Radar
CubeMars
Couldn't load pickup availability
Muhtasari
Motor ya CubeMars G100 KV10 Gimbal imeundwa kwa shimo kubwa katikati kwa ajili ya kuunganishwa kwa mzunguko wa kuteleza, ikihakikisha urahisi wa kupanga nyaya. Imejumuisha torque ya chini ya cogging, inatoa matumizi ya chini ya nishati na majibu ya haraka. Ikiwa na usahihi wa 0.01° na msaada kwa mode za udhibiti wa speed-loop na position-loop, inatoa utulivu na udhibiti wa kipekee kwa mifumo ya gimbal, vitengo vya radar, na magari ya kujitegemea. Ujumuishaji wa winding yenye kiwango cha juu cha slot-fill unaruhusu uendeshaji wa kasi ya chini na wiani wa torque wa juu, wakati muundo wa IP ulio na vumbi na maji unahakikisha uaminifu katika mazingira magumu.
Vipengele Muhimu
-
Shat kubwa tupu – Inajumuisha na mzunguko wa kuteleza wa hiari kwa usimamizi safi wa nyaya.
-
Usahihi wa Juu – 0.01° usahihi wa udhibiti kwa utendaji laini na thabiti.
-
Modes za Udhibiti Mbalimbali – Inasaidia modes za mzunguko wa kasi na mzunguko wa nafasi kwa matumizi mbalimbali.
-
Upeo wa Torque wa Juu – Uendeshaji wa kasi ya chini na pato la torque kubwa kwa mahitaji ya nguvu ya juu.
-
Muundo Imara – Imepambana na maji, vumbi, na imeundwa kwa maisha marefu ya huduma katika hali ngumu.
Specifikesheni
Specifikesheni za Jumla
| Parameta | Thamani |
|---|---|
| Maombi | Gimbal, Radar |
| Njia ya Kuendesha | FOC |
| Aina ya Kuingiza | Nyota |
| Jozi za Nguzo | 20 |
| Awamu | 3 |
| Daraja la Ukingo | H |
| Ukingo wa Juu wa Voltage | 1000V 5mA/2s |
| Upinzani wa Ukingo | 1000V 10MΩ |
| Joto la Kufanya Kazi | -20℃ ~ 50℃ |
Parameta za Umeme
| Parameta | Thamani |
|---|---|
| Voltage iliyopimwa (V) | 24 |
| Kv (rpm/V) | 10 |
| Ke (V/krpm) | 102.4 |
| Spidi isiyo na mzigo (rpm) | 223 |
| Spidi iliyoainishwa (rpm) | 130 |
| Torque iliyoainishwa (Nm) | 3 |
| Torque ya kilele (Nm) | 7.7 |
| Upeo wa sasa (A) | 2.9 |
| Upeo wa sasa wa kilele (A) | 7.8 |
| Upinzani kati ya awamu (mΩ) | 2650 |
| Inductance kati ya awamu (μH) | 2350 |
| Kt (Nm/A) | 1.030 |
| Km (Nm/√W) | 0.6327 |
| Inertia (gcm²) | 2310 |
| Muda wa mitambo wa kudumu (ms) | 0.58 |
| Muda wa umeme wa kudumu (ms) | 0.89 |
| Uzito (g) | 698 |
| Uwiano wa Max Torque-to-Weight (Nm/kg) | 11.03 |
Maombi
-
Mifumo ya kitaalamu ya kuimarisha gimbal
-
Majukwaa ya sensa za kuendesha bila dereva
-
Kifaa cha rada na ufuatiliaji kinachohitaji usahihi wa nafasi
Pakua kwa Mikono


Maelezo

CubeMars G100 KV10 Motor ya Gimbal: 24V, 223 RPM bila mzigo, 3 Nm torque iliyokadiriwa, kasi ya 130 RPM, 2.9 A sasa, 7.7 Nm torque ya kilele, 7.8 A sasa ya kilele, 10 Kv, 1.030 Kt, uzito wa 698g, -20°C hadi 50°C operesheni.
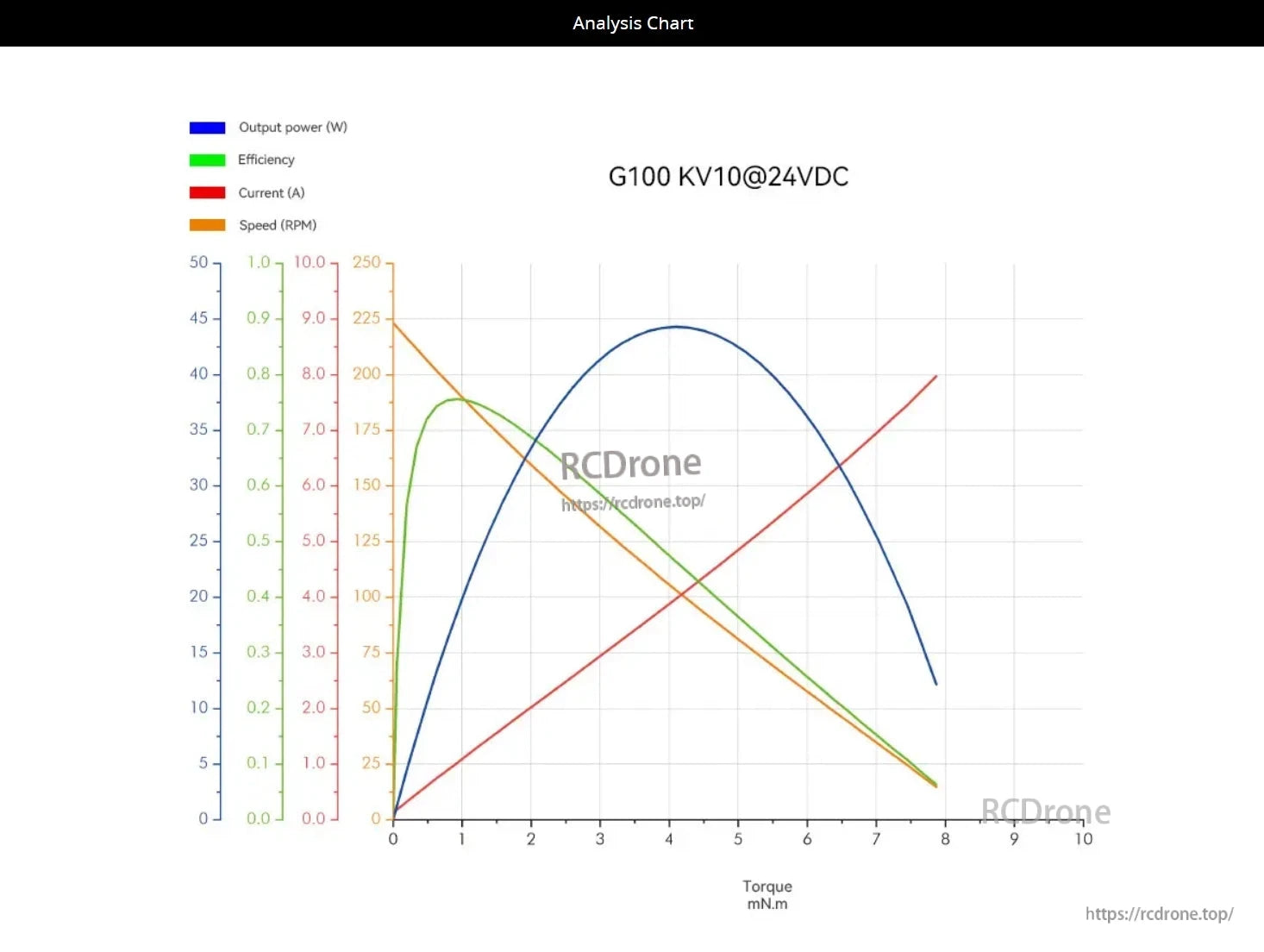
Chati ya Uchambuzi kwa CubeMars G100 KV10@24VDC Gimbmotor. Inaonyesha nguvu ya pato (W), ufanisi, sasa (A), na kasi (RPM) dhidi ya torque (mN·m). Nguvu ya pato inafikia kilele karibu 45W kwa 4 mN·m. Ufanisi unafikia kiwango cha juu karibu 0.7 kwa 1 mN·m. Sasa inaongezeka kwa mstari na torque. Kasi inaanza kwa 225 RPM na inapungua kadri torque inavyoongezeka. Grafu inaonyesha sifa za utendaji wa motor chini ya mizigo tofauti, ikiboresha nguvu na ufanisi kwa mahitaji maalum ya torque.

CubeMars G100 KV10 Motor ya Gimbal inatoa udhibiti wa msingi wa juu wa utulivu.

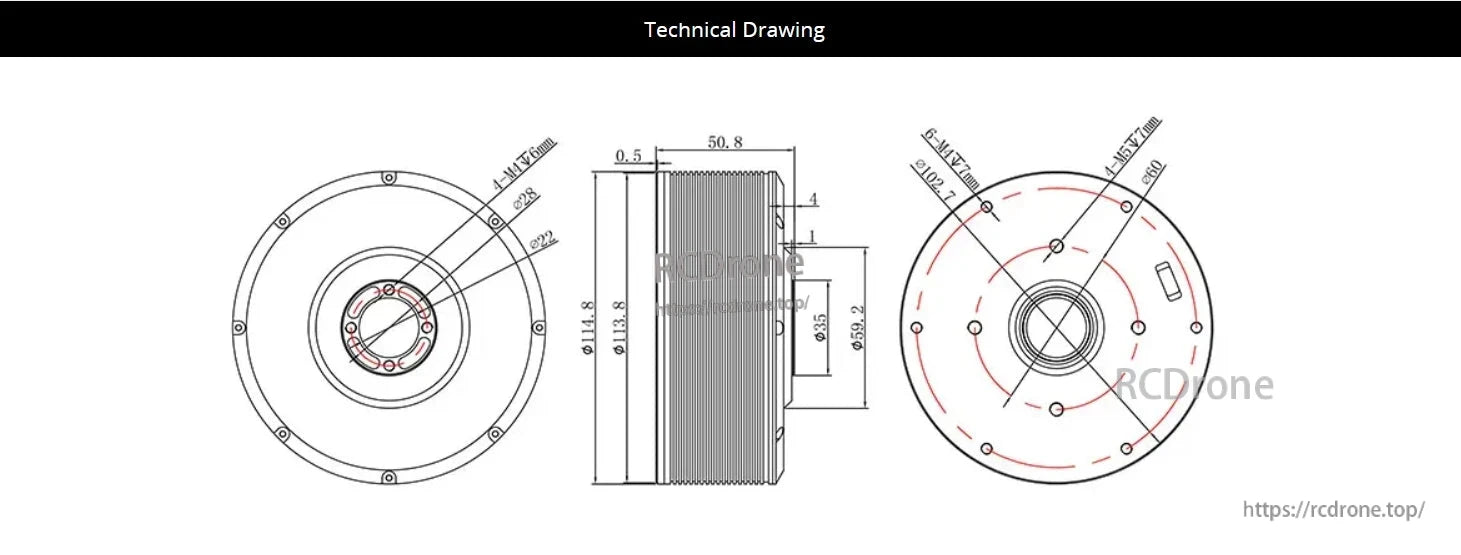
CubeMars G100 KV10 Motor ya Gimbal inatoa shimo kubwa katikati kwa urahisi wa kuvuka nyaya na ujumuishaji wa kengele ya hiari.

Muundo mwepesi, ujumuishaji bora. Inertia ya chini ya kuzunguka, majibu ya haraka. CubeMars G100 KV10.
CubeMars G100 KV10 inasaidia hali za udhibiti wa mzunguko wa kasi na mzunguko wa nafasi kwa usahihi.

Upeo wa utendaji wa kuzungusha: Uendeshaji wa kasi ya chini, wingi wa torque wa juu, ukidhi mahitaji makubwa ya nguvu. CubeMars G100 KV10 Gimbal Motor.

Masafa ya gimbal, magari huru yanatumia teknolojia ya usahihi wa juu, kasi ya chini kwa utulivu na uunganisho wa kisasa.
Related Collections



