





CubeMars GL60 II KV28 Motor ya Gimbal – Mshimo wa Hollow, Torque Ndogo ya Cogging, Udhibiti wa CAN/PWM
CubeMars GL60 II KV28 Motor ya Gimbal – Mshimo wa Hollow, Torque Ndogo ya Cogging, Udhibiti wa CAN/PWM
CubeMars
Couldn't load pickup availability
The CubeMars GL60 II KV28 Gimbal Motor imeundwa kwa ajili ya mifumo ya gimbal ya hali ya juu na matumizi ya kuendesha kwa uhuru, ikitoa utulivu wa ajabu wa kasi ya chini, udhibiti sahihi, na uaminifu wa juu. Imejumuisha bodi ya kuendesha ya kizazi kipya, GL60 II inapunguza torque ya cogging kwa 37.5% (kutoka 2.4 cN·m hadi 1.5 cN·m) kupitia muundo wa umeme ulioimarishwa na muundo wa motor ulioimarishwa, ikiboresha kwa kiasi kikubwa utendaji wa servo wa kasi ya chini.
Iliyotolewa na mawasiliano ya CAN na PWM, motor inasaidia njia tatu za udhibiti: MIT mode, Velocity-Position mode, na Velocity mode, ikiruhusu usanidi rahisi kwa mahitaji tofauti ya matumizi. The muundo wa bandari mbili unajumuisha kiunganishi cheusi XT30 2+2 (kinachounganisha nyaya za nguvu na ishara za CAN kwa usafirishaji salama na wa kuaminika) na kiunganishi cheupe CJT-3Pin (kwa muunganisho wa kompyuta ya juu, marekebisho ya parameta kwa wakati halisi, na urekebishaji mzuri).
Pamoja na utambuzi wa parameta za motor kwa kubofya moja kupitia programu ya kompyuta ya mwenyeji, watumiaji wanaweza kwa urahisi kuweka parameta za mzunguko wa sasa, kurekebisha viwango vya baud vya bandari mfuatano, na kuchagua modos ya kazi kutoka kwa kiolesura kinachoweza kueleweka. Mshiko mkubwa wa φ20 mm unaruhusu nafasi zaidi ya pete ya kuteleza, ikisaidia mahitaji magumu ya wiring katika mifumo ya gimbal ya kitaalamu.
Motor hii imeundwa kwa ajili ya utulivu wa kiwango cha viwanda, na kuifanya kuwa bora kwa mifumo ya uthibitishaji wa gimbal, sensorer za magari huru, na matumizi mengine ya udhibiti wa usahihi.
Specifikesheni
| Parameta | Thamani |
|---|---|
| Mfano wa Motor | GL60II |
| Vipimo vya Motor (mm) | φ70.5 × 33.6 |
| Teknolojia ya Stator | Isiyo na kutu, mipako ya 180 °C |
| Usanidi | 24N28P |
| Ukubwa wa Bore (mm) | φ20 |
| Thamani ya Torque (Nm/A) | 0.34 |
| Vifaa vya kuzaa | Imepitishwa 6705 ZZ |
| Nyaya za Shaba | Kiwango E 150 °C |
| Nyaya za Enamel Zenye Upeo wa Joto | Kiwango H 180 °C |
| Voltage ya Coil Inayostahimili | 500 V, 5 mA/2s |
| Inertia ya Rotor (g·cm²) | 401.086 |
| Imara dhidi ya Maji/Vumbi | / |
Vigezo vya Utendaji (KV28)
| Voltage Iliyopangwa (V) | Voltage ya Kazi (V) | Current Iliyopangwa (A) | Speed Iliyopangwa (rpm) | Torque Iliyopangwa (Nm) | Current ya Kilele (A) | Torque ya Kilele (Nm) | Upinzani wa Windings (Ω) | Inductance ya Line (mH) | Uzito (g) |
|---|---|---|---|---|---|---|---|---|---|
| 16 | 16 | 1.56 | 153 | 0.6 | 2.75 | 1.0 | 5.8 | 6 | 276 |
| 24 | 24 | 1.54 | 319 | 0.6 | 4.09 | 1.5 | 5.8 | 6 | 276 |
Mchoro wa Kiufundi
-
Upeo wa Nje: φ70.5 mm
-
Upeo wa Shimo: φ20 mm
-
Ufungaji: 4 × viscrew M3
-
Urefu: 33.6 mm
-
Vipimo vya Mzunguko wa Bolti: φ50 mm (mbele), φ40 mm (nyuma)
Pakua Mwongozo
Vipengele Muhimu
-
Jopo la Drive la Hollow Mpya – Inaruhusu uunganisho wa kompakt na shimoni kubwa la hollow.
-
Kupunguza Torque ya Cogging kwa 37.5% – Kutoka 2.4 cN·m hadi 1.5 cN·m kwa utulivu bora wa kasi ya chini.
-
MACommunication ya CAN & PWM – Uunganisho wa mfumo wa kudhibiti wenye kubadilika.
-
Modes Tatu za Kudhibiti – MIT, Kasi-Nafasi, Kasi.
-
Muundo wa Interface Mbili – XT30 2+2 kwa nguvu & ishara; CJT-3Pin kwa urekebishaji.
-
Utambuzi wa Parameta za Motor kwa Bonyeza Moja – Mipangilio na urekebishaji wa haraka.
Maombi
-
Ustahimilivu wa gimbal wa kitaalamu kwa majukwaa ya angani, ardhi, au baharini.
-
mifumo ya kuendesha kwa uhuru inahitaji usawazishaji sahihi wa sensor.
-
Vifaa vya macho vya usahihi wa juu.
-
Robotics ambapo udhibiti laini wa kasi ya chini ni muhimu.
Maelezo
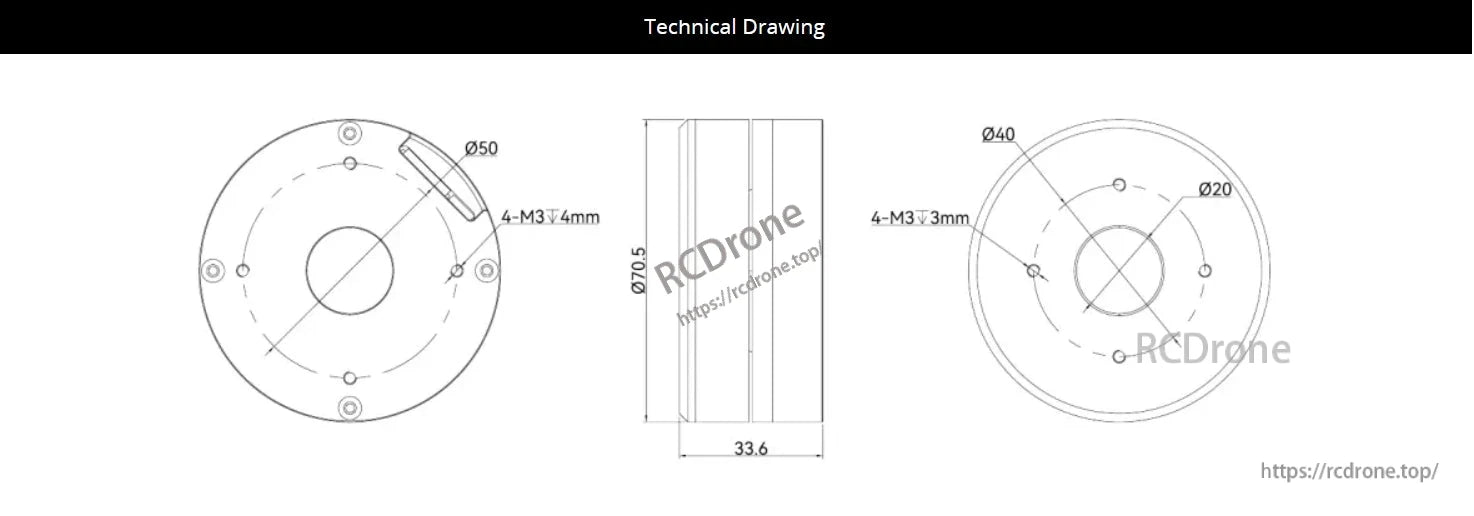
CubeMars GL60 II KV28 Gimbal Motor vipimo: Ø70.5 x 33.6 mm, Ø40 na Ø20 mashimo, screws 4-M3 zikiwa na kina cha 4mm na 3mm.
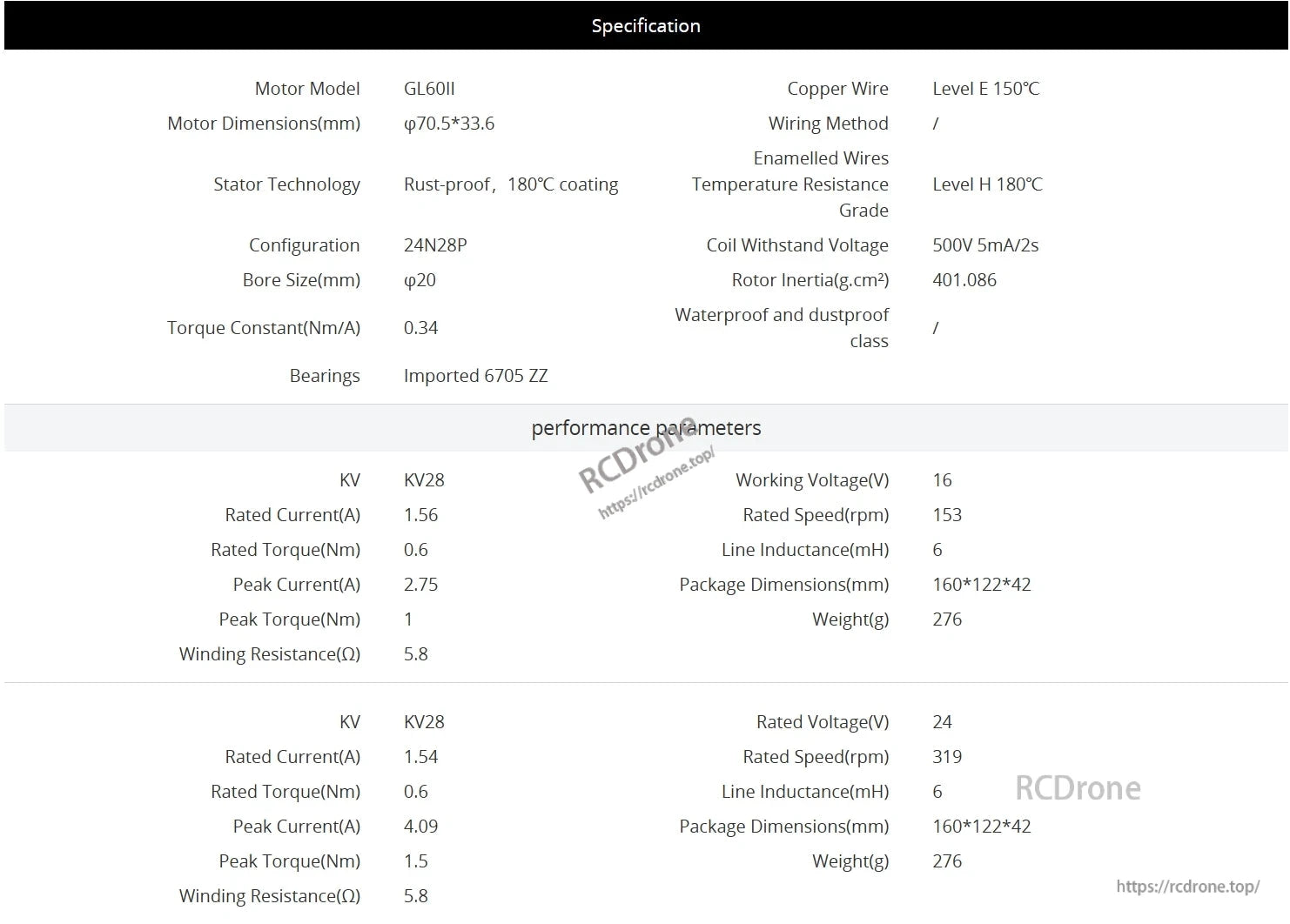
CubeMars GL60 II KV28 Gimbal Motor: φ70.5*33.6 mm, mipako ya 180°C, muundo wa 24N28P, torque ya 0.34 Nm/A, sasa ya 1.56 A, torque ya 0.6 Nm, kasi ya 153 rpm, voltage ya kazi ya 16V, uzito wa 276g, muundo wa kuzuia maji/vumbi.
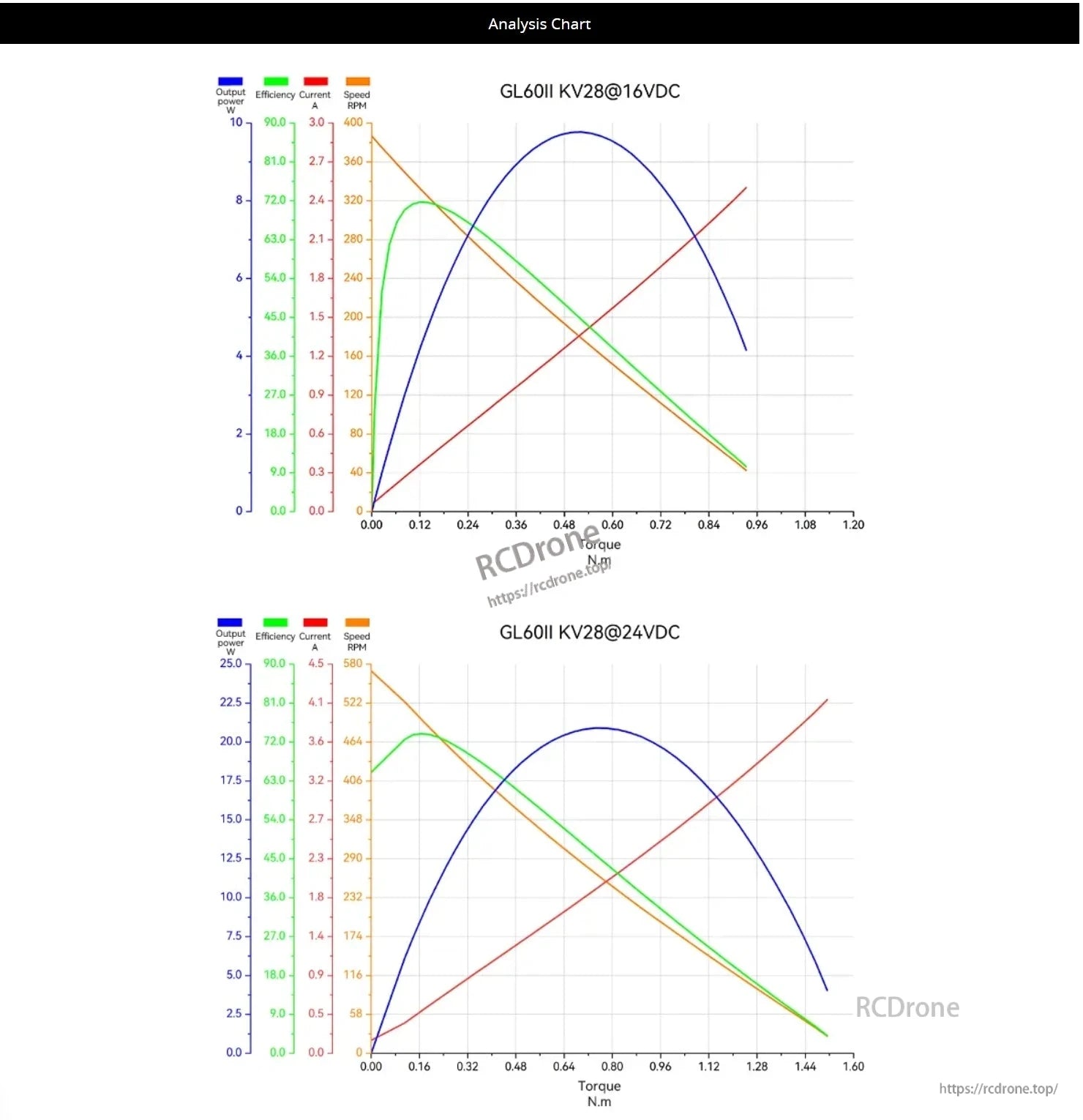
CubeMars GL60 II KV28 Gimbal Motor chati za uchambuzi zinaonyesha nguvu ya pato, ufanisi, sasa, na kasi katika 16VDC na 24VDC, huku torque ikiwa kama variable. Takwimu zinaonyesha viashiria vya utendaji wa motor.
GL60 II KV28 Gimbal Motor: 16V, 9.6W, 0.6Nm torque, 1.56A sasa, kasi ya 153 RPM, torque ya kilele ya 1Nm, 2.75A peak current, 448 no-load RPM, 28 pole pairs, 276g weight, 70.5x33.6mm size.
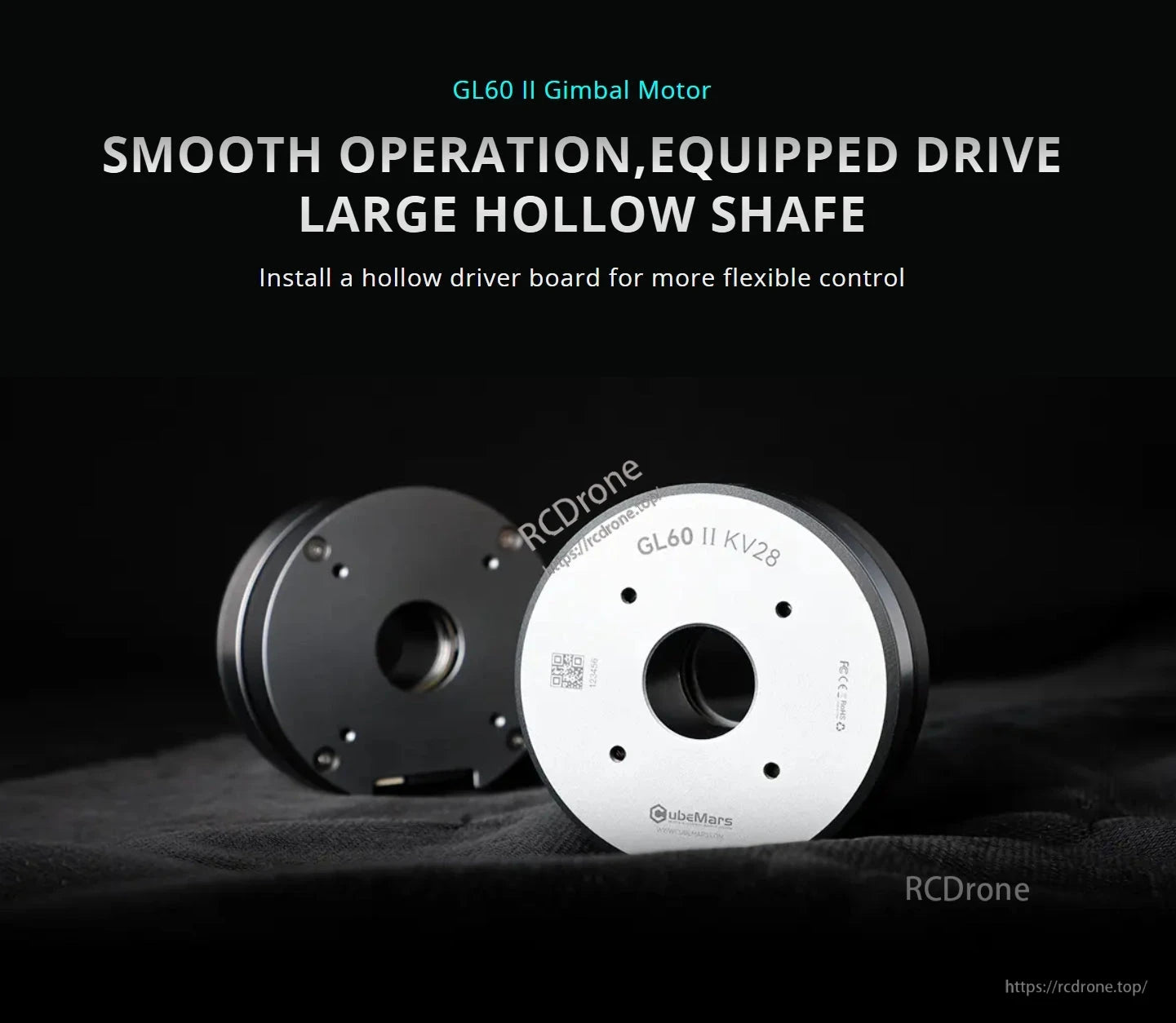
Motor ya Gimbal ya CubeMars GL60 II KV28 inatoa uendeshaji laini, inaendesha, na shingo kubwa ya ndani kwa udhibiti rahisi.
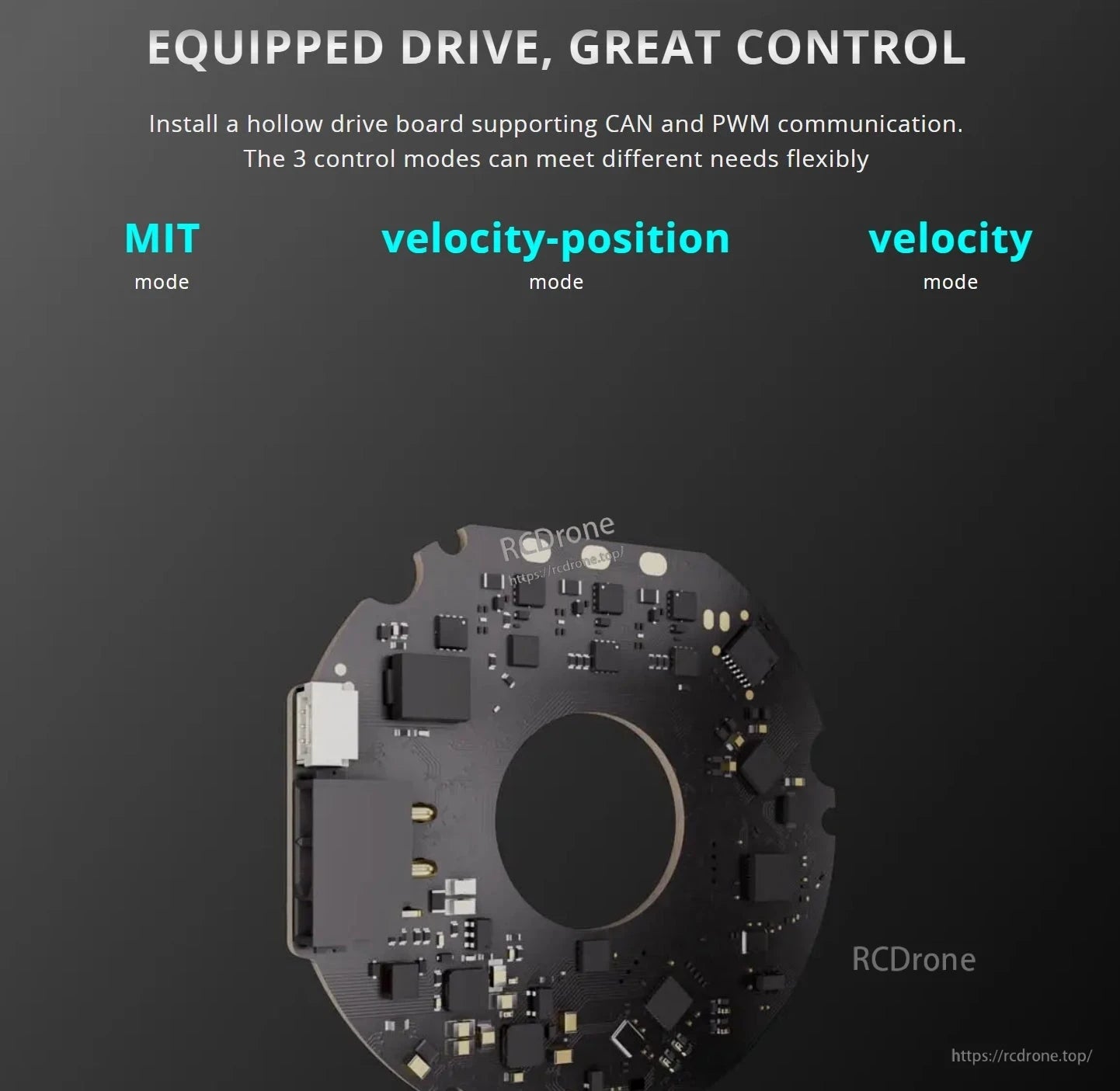
CubeMars GL60 II KV28 Motor ya Gimbal: Inaendesha, udhibiti mzuri. Inasaidia CAN, PWM; inatoa MIT, hali za kasi-na-nafasi, kasi.

EM iliyoboreshwa, torque ya chini ya cogging. Muundo wa umeme wa kisasa unapunguza torque kutoka 2.4 cN.m hadi 1.5 cN.m kwa utendaji bora wa servo wa kasi ya chini.

Interface ya Dual ya Black & White Bure kwa ajili ya urekebishaji. XT30 2+2 inachanganya nguvu na nyaya za ishara za CAN kwa usafirishaji wa kuaminika. CJT-3pin inachanganya na kompyuta ya juu kwa mawasiliano na marekebisho ya vigezo.
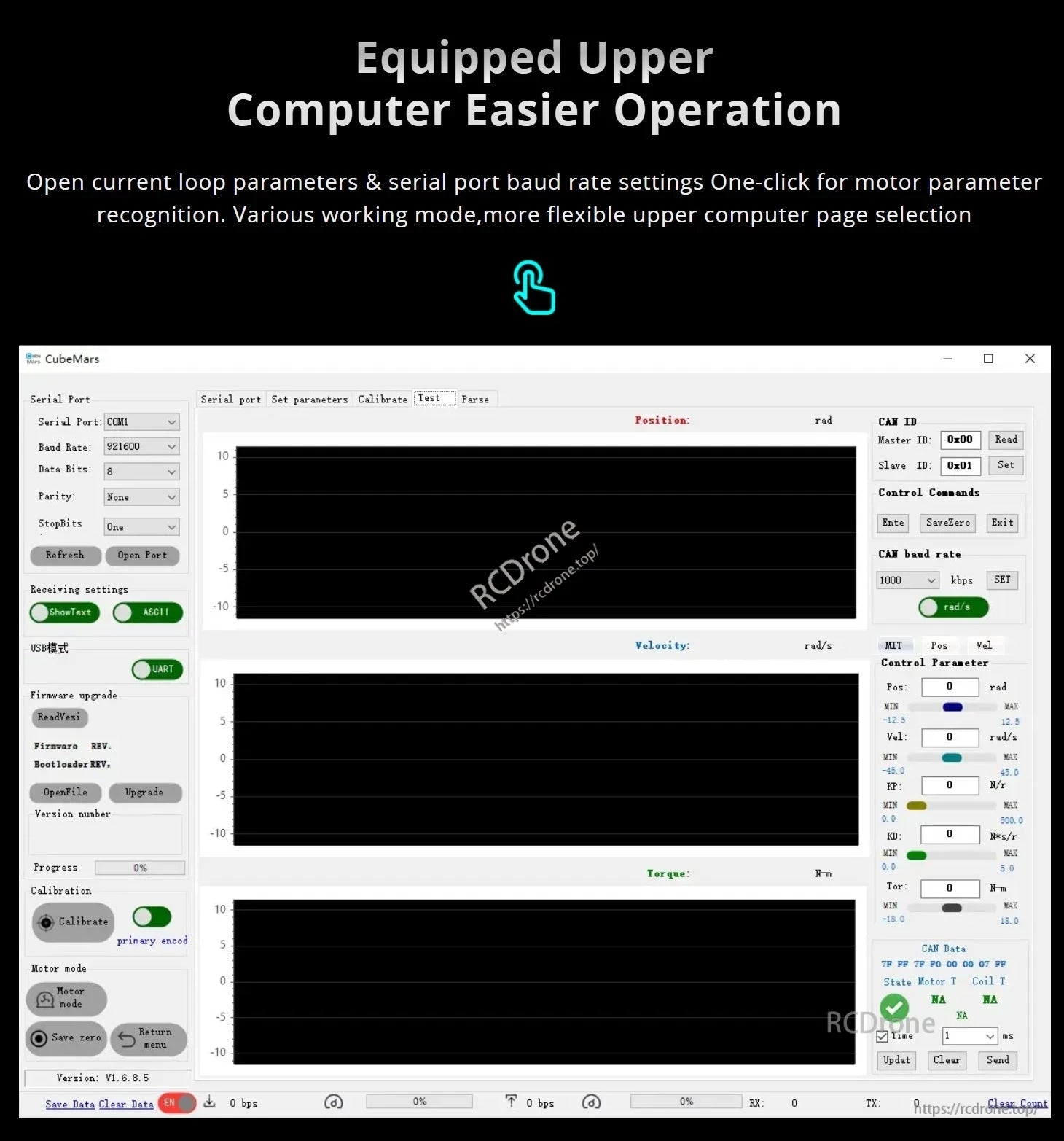
Interface ya Motor ya Gimbal ya CubeMars GL60 II KV28.Imewekwa kompyuta ya juu kwa ajili ya kufanya kazi kwa urahisi. Vipengele vinajumuisha vigezo vya mzunguko, mipangilio ya bandari ya serial, utambuzi wa motor, na uchaguzi wa kurasa unaoweza kubadilishwa. Inaonyesha nafasi, kasi, na grafu za torque.
Related Collections





