





CubeMars R80 KV110 Motor 48V 3-Phase FOC yenye Hall Sensors, Exoskeleton na Udhibiti wa Roboti
CubeMars R80 KV110 Motor 48V 3-Phase FOC yenye Hall Sensors, Exoskeleton na Udhibiti wa Roboti
CubeMars
Couldn't load pickup availability
Muhtasari
CubeMars R80 KV110 Motor ni motor ya awamu 3 inayokusudiwa kwa matumizi ya kuendesha exoskeleton na roboti, ikiwa na sensa za Hall zilizojumuishwa na msaada wa FOC (udhibiti wa uwanja). Inajumuisha muundo maalum wa kutolea joto na kiunganishi cha mtindo wa kiunganishi ili kurahisisha ufungaji.
Vipengele Muhimu
- Sensor za Hall zilizojumuishwa
- Makosa ya usahihi wa pembe ya umeme: ±10°
- Muundo maalum wa kutolea joto (msingi mwembamba & pad ya silicone yenye uhamasishaji wa joto wa juu; kupunguza urefu wa jumla ili kuboresha kutolea joto)
- Muundo wa shimo la mfano kwenye kengele kwa ajili ya usakinishaji wa gearbox (gearbox ya harmonic, flange, au aina nyingine za gearbox)
- Muundo wa kiunganishi kwa usakinishaji rahisi (inachukua nafasi ya nyaya za jadi)
- Grafu ya uendeshaji wa motor iliyotolewa (speed vs torque kwa 48V; maeneo yasiyo na uendeshaji / uendeshaji wa muda mfupi / maeneo ya uendeshaji endelevu)
Maelezo ya Kiufundi
| Matumizi | Exoskeleton |
| Njia ya kuendesha | FOC |
| Joto la mazingira ya uendeshaji | -20℃~50℃ |
| Aina ya kuzungusha | delta |
| Daraja la insulation | H |
| Insulation ya Voltage Kuu | 1000V 5mA/2s |
| Upinzani wa insulation | 1000V10MΩ |
| Awamu | 3 |
| Jozi za nguzo | 21 |
| Voltage iliyopangwa (V) | 48 |
| Spidi isiyo na mzigo (rpm) | 4320 |
| Torque iliyopangwa (Nm) | 1.3 |
| Speed iliyopimwa (rpm) | 3580 |
| Current iliyopimwa (ADC) | 12.3 |
| Torque ya kilele (Nm) | 4 |
| Current ya kilele (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Upinzani kati ya Awamu (mΩ) | 125 |
| Inductance kati ya Awamu (μH) | 87 |
| Inertia (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Muda wa kiufundi (ms) | 0.83 |
| Muda wa umeme (ms) | 0.70 |
| Uzito (g) | 354 |
| Uwiano wa torque wa juu zaidi (Nm/kg) | 11.3 |
| Awamu ya Motor U V W | Chora ya uhandisi ya rejea |
| Bandari ya sensor ya Hall | VCC, GND, Hu, Hv, HW (chora ya uhandisi ya rejea) |
| Barua | Hu-U; Hv-V; Hw-W |
Matumizi
- Roboti za kibinadamu
- Michemu za roboti
- Exoskeletons
- Roboti wanne kwa miguu
- Magari ya AGV
- Roboti za ARU
Maelekezo / Hati
Kuhusu maswali ya waya/uchaguzi wa dereva au msaada wa hati, wasiliana na msaada kupitia https://rcdrone.top/ au barua pepe [email protected].
Kumbuka kutoka kwenye chati iliyotolewa: Takwimu zote ni kwa ajili ya taarifa pekee | Ziko katika mabadiliko bila taarifa.
Maelezo

CubeMars R80 KV110 imejengwa kwa ajili ya viungo vya roboti vya kompakt na injini za exoskeleton, ikiwa na muundo wa actuator-style wa chini.

Sensor za Hall zilizojumuishwa zinatoa mrejesho wa nafasi ya rotor kwa udhibiti thabiti wa FOC, huku usahihi wa pembe ya umeme ukiwa na tofauti iliyokadiriwa ya ±10°.

Muundo maalum wa kutolea joto unatumia msingi mwembamba sana na pedi ya silicone yenye uhamasishaji wa joto wa juu kusaidia kudhibiti joto katika ujenzi wa kompakt.

Shimo za kufunga za muundo kwenye kengele hurahisisha kuunganisha gearbox ya harmonic, flange, au aina nyingine za gearbox.
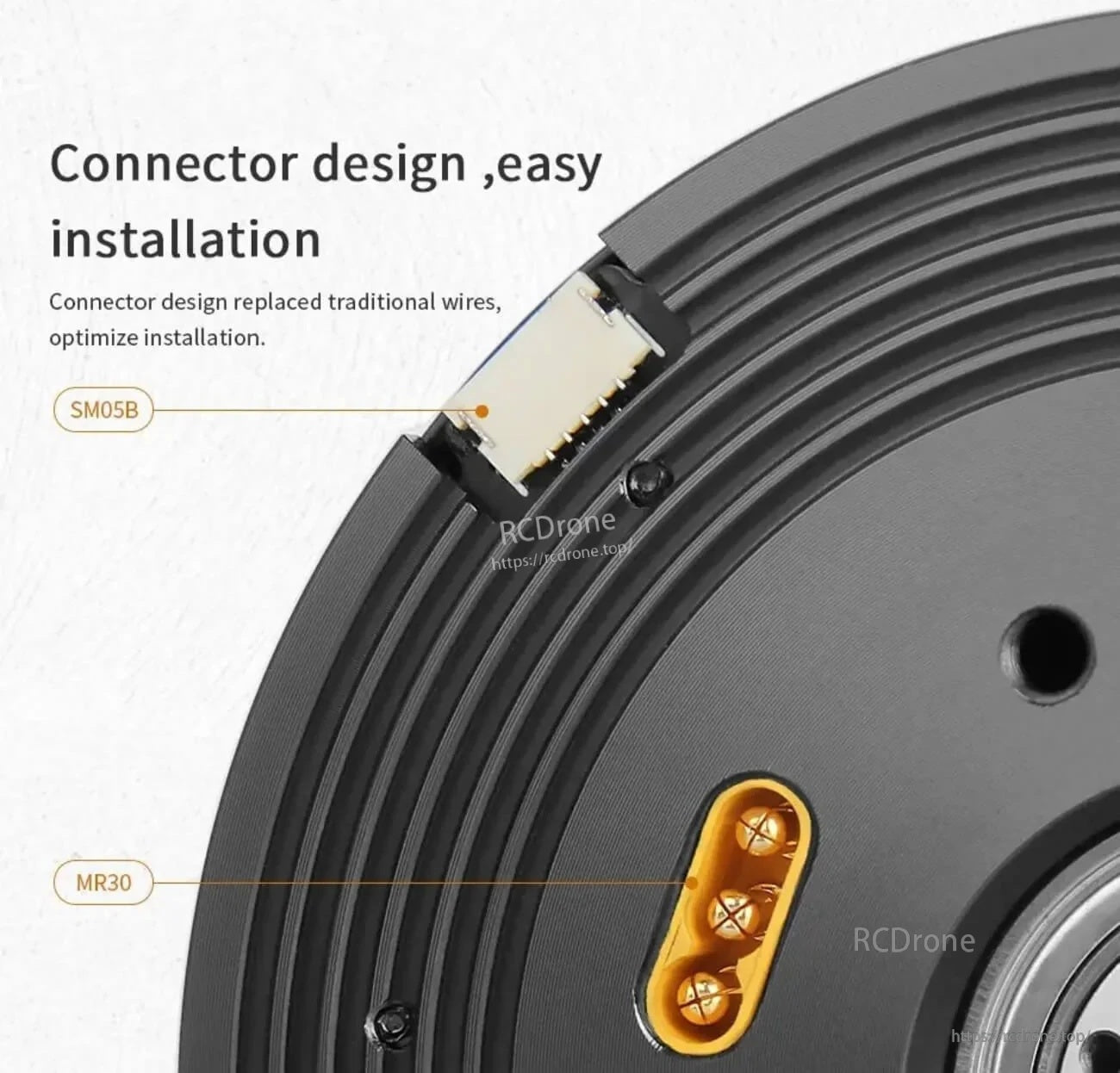
Uunganisho wa waya wa mtindo wa kiunganishi unachukua nafasi ya nyaya za kawaida za huru kwa ufungaji safi na wa haraka wa uunganisho wa nguvu na sensa.
Muundo wa umeme ulioimarishwa unalenga torque ya chini ya cogging na inertia ya chini ya rotor kwa udhibiti wa mwendo laini.

Imeundwa kwa roboti zenye miguu zenye mzigo mzito na matumizi mengine ya viungio vya juu vya torque ambapo matokeo thabiti yana umuhimu.

Chati ya uendeshaji ya kasi dhidi ya torque ya 48V inasaidia kuchagua eneo salama la kuendelea na kuelewa uwezo wa kilele wa muda mfupi.
Related Collections





