




CubeMars RI60 KV120 Inrunner Motoru Usio na Sura | 0.57Nm, 120KV, 48V BLDC kwa Cobot & Exoskeleton
CubeMars RI60 KV120 Inrunner Motoru Usio na Sura | 0.57Nm, 120KV, 48V BLDC kwa Cobot & Exoskeleton
CubeMars
Couldn't load pickup availability
Muhtasari
Motor ya CubeMars RI60 KV120 Frameless Inrunner Torque imeundwa kwa ajili ya matumizi ya roboti yenye utendaji wa juu na yenye ukubwa mdogo. Inasaidia volti za uendeshaji 24V/36V/48V, motor hii ya BLDC isiyo na fremu inatoa kasi ya juu ya torque, harakati laini zisizo na kukwama, na udhibiti sahihi wa 0.01°. Ikiwa na kipenyo cha nje cha Φ60mm na uzito wa 155.9g, ni bora kwa mikono ya cobot, exoskeletons, na viungo vya roboti vyenye nafasi finyu.
Motor hii ina stator iliyoandikwa kwa mkono kwa ajili ya kiwango bora cha kujaza shaba, magneti ya kudumu yenye umbo la curve kwa ajili ya majibu bora ya sinusoidal BEMF, na chaguo za sensor ya hall na kuunganishwa kwa encoder. Inasaidia Udhibiti wa Uwanja wa Shamba (FOC), inafanya kazi kwa kuaminika kutoka -20°C hadi 50°C, na inavumilia hadi 1.63 Nm ya torque ya kilele. Toleo la rotor iliyoimarishwa linaongeza usahihi wa sensa za hall kwa kuongeza upeo wa kugundua kwa 2mm.
Vipengele Muhimu
-
Muundo wa BLDC wa Inrunner Bila Frame – Hakuna nyumba ya nje, bora kwa usakinishaji wa ndani
-
Upeo wa Torque wa Juu – Uwiano wa juu wa torque kwa uzito wa 10.46 Nm/kg
-
Udhibiti wa Usahihi – Inafaa na encoders zenye azimio la juu, inasaidia 0.01° kuweka
-
Torque ya Cogging ya Chini – Uendeshaji laini, kupunguza vibration, na kelele
-
Inayovumilia Joto – Inafanya kazi katika joto la mazingira kutoka -20°C hadi 50°C
-
Interfaces nyingi za Udhibiti – Inasaidia mrejesho wa encoder na sensor ya hall
-
Stator iliyoandikwa kwa Mkono – Kujaza shaba bora, 0.5mm nafasi ya ukingo kwa ajili ya mkusanyiko rahisi
-
Toleo la Rotor la Hiari – +2mm urefu wa rotor unaboresha usawa wa sensor ya hall
Maelezo ya Kitaalamu
Maombi & Mipangilio
| Parameta | Thamani |
|---|---|
| Maombi | Roboti ya Mkono / Exoskeleton |
| Njia ya Kuendesha | FOC |
| Awamu | Awamu 3 |
| Aina ya Windings | Delta |
| Jozi za Mifupa | 14 |
| Daraja la Ukingo | C |
| Voltage ya Ukingo | 500V 5mA/2s |
| Upinzani wa Ukingo | 500V 10MΩ |
| Joto la Kufanya Kazi. | -20℃ ~ 50℃ |
Tabia za Umeme
| Parameta | Thamani |
|---|---|
| Voltage iliyoainishwa (V) | 24 / 36 / 48 |
| Spidi isiyo na mzigo (rpm) | 2532 / 3798 / 5064 |
| Spidi iliyoainishwa (rpm) | 1440 / 2320 / 3190 |
| Torque iliyoainishwa (Nm) | 0.57 |
| Torque ya kilele (Nm) | 1.63 |
| Current iliyoainishwa (ADC) | 5.6 |
| Current ya kilele (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Upinzani wa Awamu (mΩ) | 900 |
| Induktansi ya Awamu (μH) | 877.5 |
| Inertia (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Wakati wa Makanika (ms) | 0.3 |
| Wakati wa Umeme (ms) | 0.98 |
| Uzito (g) | 155.9 |
| Uwiano wa Torque/Uzito | 10.46 Nm/kg |
Chaguzi za Encoder & Sensor wa Hall
-
Pamoja na Sensor wa Hall: Kuboresha kugundua rotor, inapendekezwa kwa ugunduzi wa nafasi sahihi
-
Bila Sensor wa Hall: Muundo wa kompakt kwa mazingira yaliyopangwa
-
Encoders Zinazoungwa Mkono: Renishaw, Sick, encoders zingine za usahihi wa juu (0.01° resolution)
Vipimo vya Kifaa
| Toleo | Upeo wa Nje | Upeo wa Ndani | Kimo cha Rotor | Unene wa Juu |
|---|---|---|---|---|
| Bila Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (max) |
| Pamoja na Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (max) |
Rejelea michoro ya kiufundi kwa uvumilivu sahihi na mifumo ya mashimo ya kufunga.
Kiwango cha Utendaji
Imepimwa kwa 24VDC:
-
Ufanisi wa juu katika ~0.3 Nm
-
Nishati ya kilele >125W katika ~1.1 Nm
-
Max kasi ~2500 RPM
-
Majibu ya sasa thabiti katika anuwai ya torque
Taarifa za Wiring & Connector
| Wire | Rangi + Ukubwa |
|---|---|
| U | Black + 18# Silicone |
| V | Yellow + 18# Silicone |
| W | Red + 18# Silicone |
| Hu | Blue + 30# Silicone |
| Hv | Green + 30# Silicone |
| Hw | Yellow + 30# Silicone |
| VCC | Red + 30# Silicone |
| GND | Black + 30# Silicone |
Ramani ya Wiring:
Hu-U, Hv-V, Hw-W
Pakua Mwongozo
![]() RI60 na sensor ya ukumbi-2D.pdf
RI60 na sensor ya ukumbi-2D.pdf
![]() RI60 bila sensor ya ukumbi-3D.zip
RI60 bila sensor ya ukumbi-3D.zip
![]() RI60 na sensor ya ukumbi-3D.zip
RI60 na sensor ya ukumbi-3D.zip
Maombi
-
Silaha za roboti za ushirikiano
-
Viungo vya exoskeleton
-
Roboti zenye miguu na wanyama wanne
-
Roboti za matibabu za usahihi
-
Moduli za servo zilizojumuishwa
Maelezo
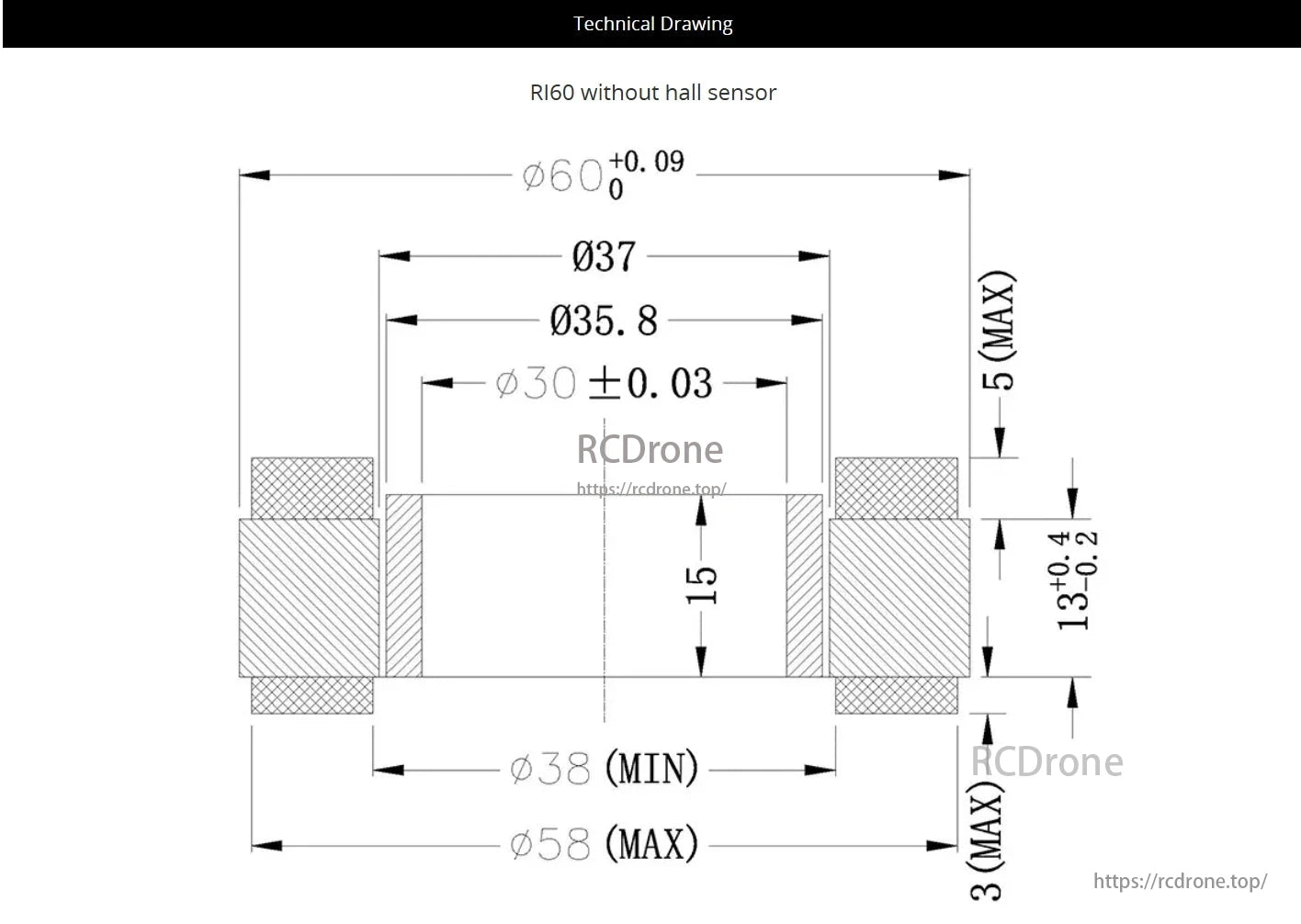
CubeMars Vipimo vya Motor ya RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), urefu 15, urefu wa juu 5, 13 ±0.4 upana.
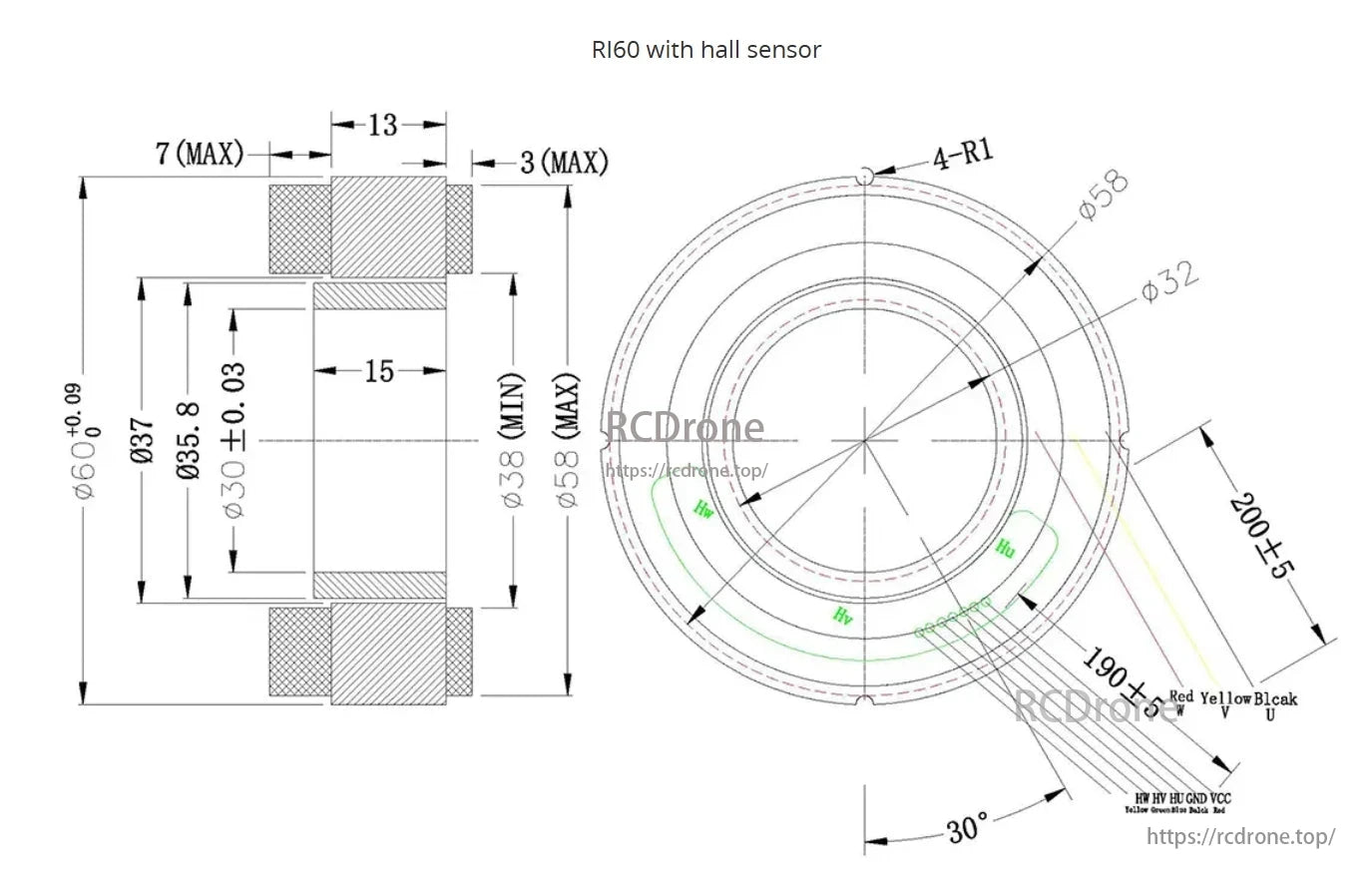
Motor ya CubeMars RI60 yenye sensor ya hall. Vipimo: kipenyo cha 60mm, urefu wa 200mm. Ina vipengele vya alama 4-R1, φ58, φ32, na pembe ya 30°. Inajumuisha lebo za HW, HV, HU.
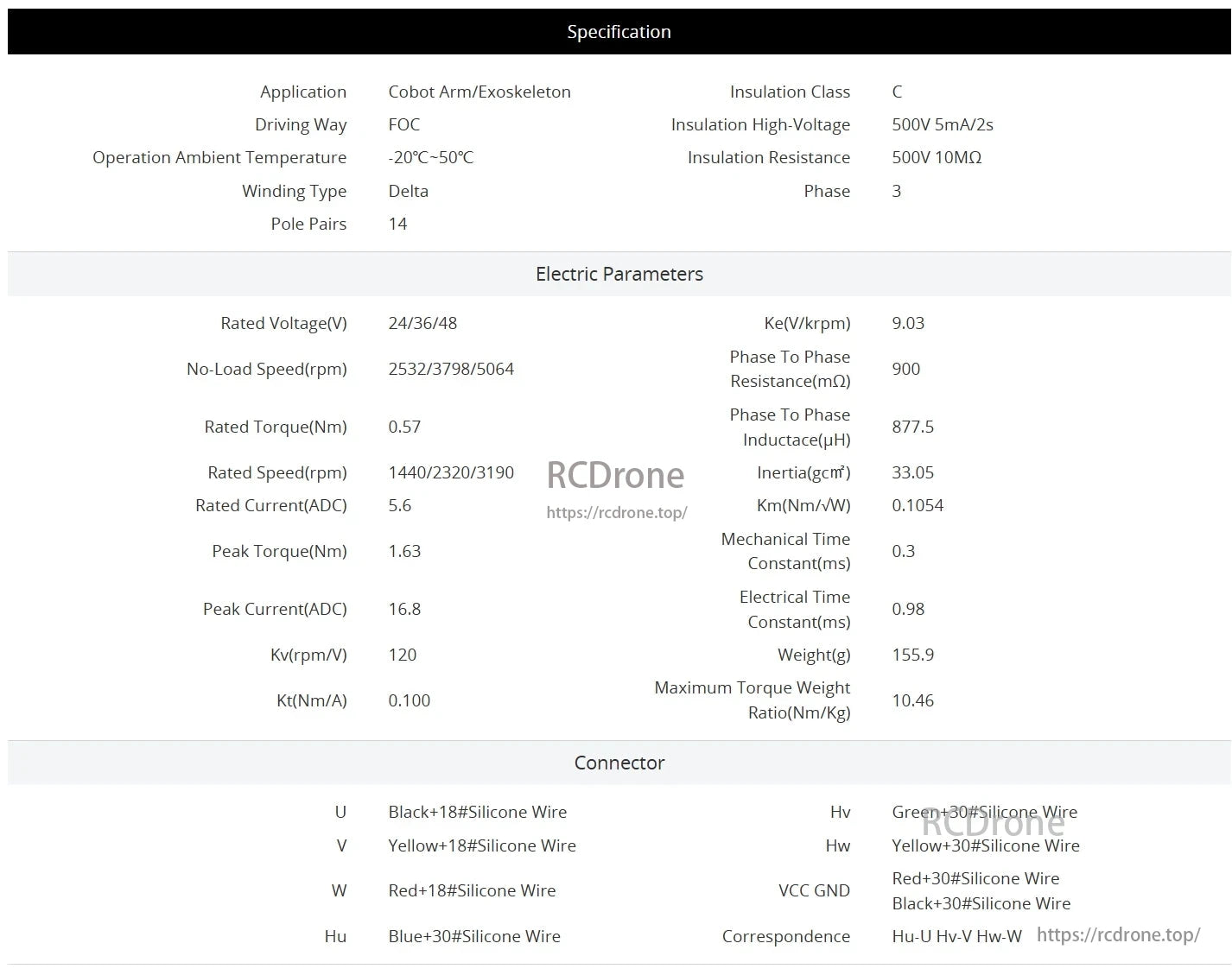
Motor ya CubeMars RI60: matumizi ya mkono wa Cobot/exoskeleton, kuendesha FOC, operesheni ya -20°C-50°C, jozi 14 za nguzo. Voltage iliyokadiriwa 24/36/48V, kasi isiyo na mzigo 2532/3798/5064rpm, torque iliyokadiriwa 0.57Nm, torque ya kilele 1.63Nm.
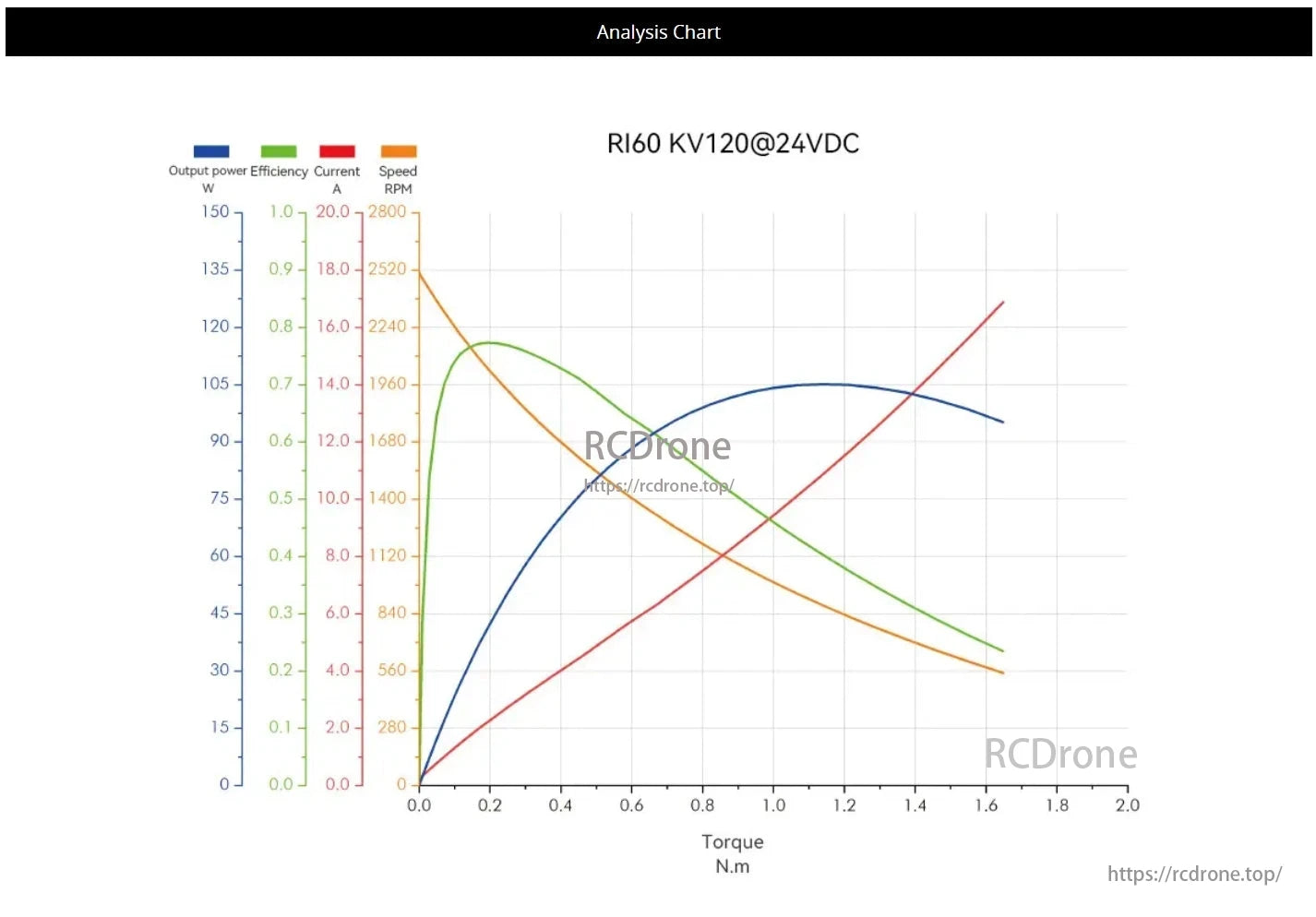
Chati ya uchambuzi wa motor ya CubeMars RI60 katika KV120@24VDC. Dispinaonyesha nguvu ya pato, ufanisi, sasa, na kasi dhidi ya torque. Ufanisi unafikia kilele karibu na 0.2 N.m, huku kasi ikipungua kadri torque inavyoongezeka.
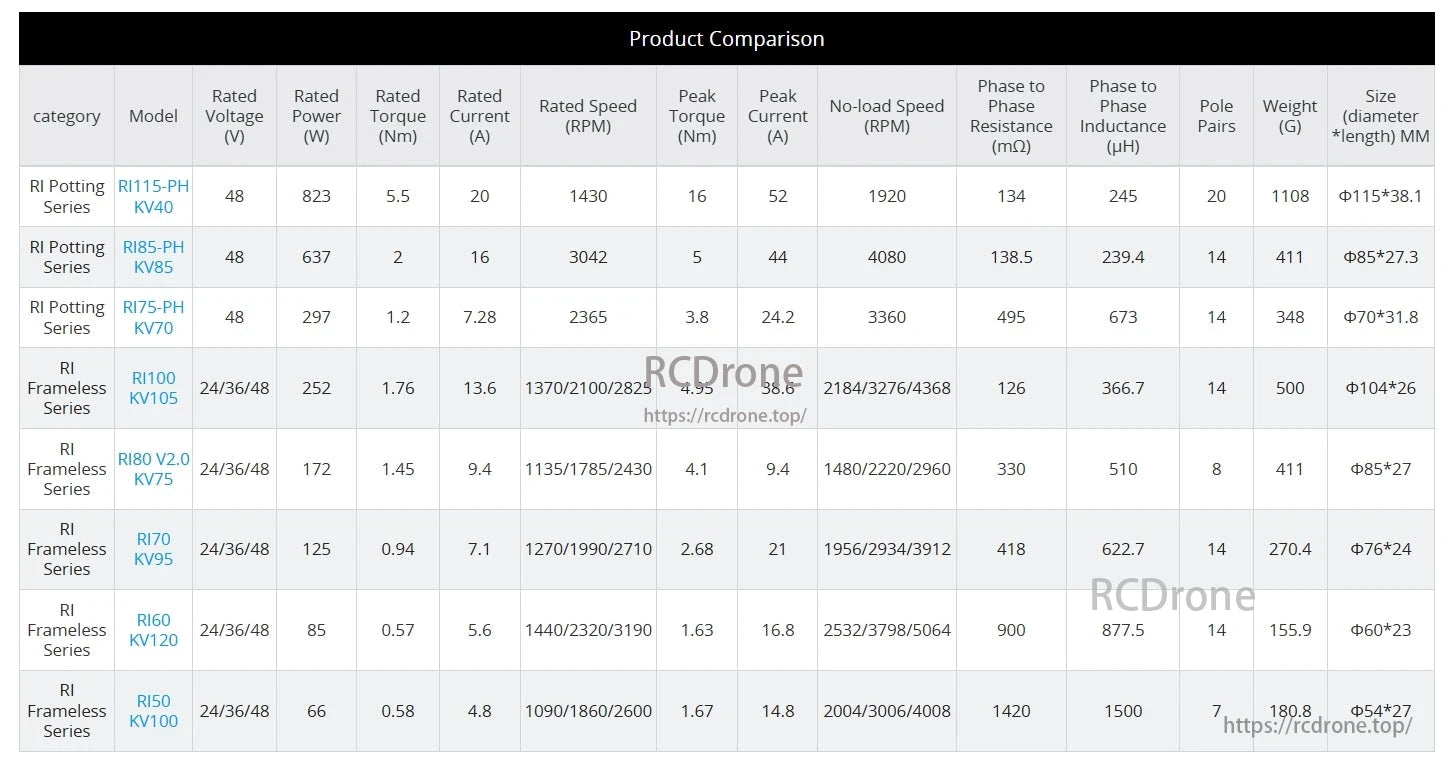
Motor ya CubeMars RI60 KV120: 24/36/48V, 85W, torque ya 0.57Nm, sasa ya 5.6A, kasi ya 1440/2320/3190 RPM, torque ya kilele 1.63Nm, sasa ya kilele 16.8A, upinzani wa 900mΩ, inductance ya 877.5µH, jozi 14 za nguzo, uzito wa 155.9g, saizi ya φ60*23mm.

Motor ya CubeMars RI60: Torque ya chini ya cogging, uendeshaji laini, kelele ya chini, nguvu ya dynamic.

Stator iliyoandikwa kwa mkono yenye nafasi ya 0.5mm kwa utendaji bora.

Magnet ya kudumu iliyo na umbo la curve kwa muundo wa motor ya BEMF Sinus, ikihakikisha udhibiti rahisi.

Toleo la Juu la RI60 Rotor. Kimo cha jumla kimeongezeka kwa 2mm kwa ajili ya kugundua sensor ya hall bora.
Motor ya CubeMars RI60: -40°C hadi 85°C, chaguo za encoder zenye azimio la juu.
Related Collections




