



DAMIAO DM-2325 24 V, 380 rpm, 5 N·m Motor ya Roboti yenye Gia 1:25, CAN/FD CAN na Encoder ya Kuongeza
DAMIAO DM-2325 24 V, 380 rpm, 5 N·m Motor ya Roboti yenye Gia 1:25, CAN/FD CAN na Encoder ya Kuongeza
DAMIAO
Regular price
$45.00 USD
Regular price
Sale price
$45.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
DAMIAO DM-2325 ni Motor ya Roboti ndogo iliyoundwa kwa ajili ya kudhibiti mwendo kwa usahihi katika roboti. Inajumuisha mrejesho wa encoder wa incremental, interfaces za udhibiti wa CAN/FD CAN, na usanidi wa UART. Ikiwa na uwiano wa kupunguza wa 1:25, usambazaji wa 24 V, na njia za udhibiti zilizofafanuliwa, inafaa kwa matumizi yanayohitaji udhibiti wa kasi na nafasi unaotegemewa.
Vipengele Muhimu
- Mfano: DM-2325
- Voltage ya kawaida: 24 V
- Current ya kawaida: 5 A / 3.2 A; Current ya kilele: 13 A / 7.5 A
- Torque ya kawaida: 5 N·m; Torque ya kilele: 2 N·m
- Kasi ya kawaida: 380 rpm; Kasi ya juu bila mzigo: 560 rpm
- Uwiano wa kupunguza: 1:25; Jozi za pole: 7
- Inductance ya awamu: 75 μH; Upinzani wa awamu: 0.2915 Ω
- Mzigo wa radial wa juu: 395 N
- Vipimo: 28 mm kipenyo cha nje; 77.6 mm urefu
- Uzito wa motor: 172. html 2 g
- Aina ya Encoder: Encoder ya Incremental
- Kiunganishi cha udhibiti: CAN@1 Mbps (Max), FD CAN@5 Mbps (Max)
- Kiunganishi cha usanidi: UART@921600 bps
- Modes za udhibiti: MIT mode, Speed Mode, Position Mode
Maelezo ya Kiufundi
| Mfano | DM-2325 |
| Voltage ya Kawaida | 24 V |
| Current ya Kawaida | 5 A / 3.2 A |
| Current ya Peak | 13 A / 7.5 A |
| Torque ya Kawaida | 5 N·m |
| Torque ya Peak | 2 N·m |
| Speed ya Kawaida | 380 rpm |
| Max. Speed isiyo na mzigo | 560 rpm |
| Ratio ya Kupunguza | 1:25 |
| Jozi za Pole | 7 |
| Inductance ya Awamu | 75 μH |
| Upinzani wa Awamu | 0. html 2915 Ω |
| Mzigo wa Radial wa Juu | 395 N |
| Upeo wa Nje | 28 mm |
| Kimo | 77.6 mm |
| Uzito wa Motor | 172.2 g |
| Aina ya Encoder | Encoder ya Kuongeza |
| Kiunganishi cha Udhibiti | CAN@1 Mbps (Max), FD CAN@5 Mbps (Max) |
| Kiunganishi cha Mipangilio | UART@921600 bps |
| Njia za Udhibiti | Njia ya MIT; Njia ya Kasi; Njia ya Nafasi |
Ulinzi
- Ulinzi wa joto kupita kiasi wa kuendesha; joto la ulinzi: 120 °C. Joto kupita kiasi linaondoa "njia ya kuwezesha".
- Ulinzi wa joto kupita kiasi wa motor; weka kulingana na mahitaji ya matumizi (inashauriwa isizidi 100 °C). Joto kupita kiasi linaondoa "njia ya kuwezesha".
- Ulinzi wa voltage kupita kiasi wa motor; weka kulingana na mahitaji ya matumizi (inashauriwa isizidi 60 V). Voltage kupita kiasi linaondoa "njia ya kuwezesha". html
- Ulinzi wa kupoteza mawasiliano; ikiwa hakuna amri ya CAN inayopokelewa ndani ya kipindi kilichowekwa, mfumo unatoka kwenye "mode ya kuwezesha".
- Ulinzi wa juu wa sasa wa motor; weka kulingana na mahitaji ya matumizi (inapendekezwa isizidi 13 A). Juu ya sasa inatoka kwenye "mode ya kuwezesha".
- Ulinzi wa chini wa voltage wa motor; ikiwa voltage ya usambazaji iko chini ya thamani iliyowekwa, toka kwenye "mode ya kuwezesha" (voltage ya usambazaji isiyopungua 15 V).
Maombi
- Roboti za Binadamu
- Michemu ya Roboti
- Exoskeletons
- Roboti za Mifugo Mine
- Magari ya AGV
- Roboti za ARU
Maelekezo na Upakuaji
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_mchoro_wa_ufungaji.pdf
- DM-2325_armature_mchoro_wa_ufungaji.pdf
Mchoro wa Ufungaji
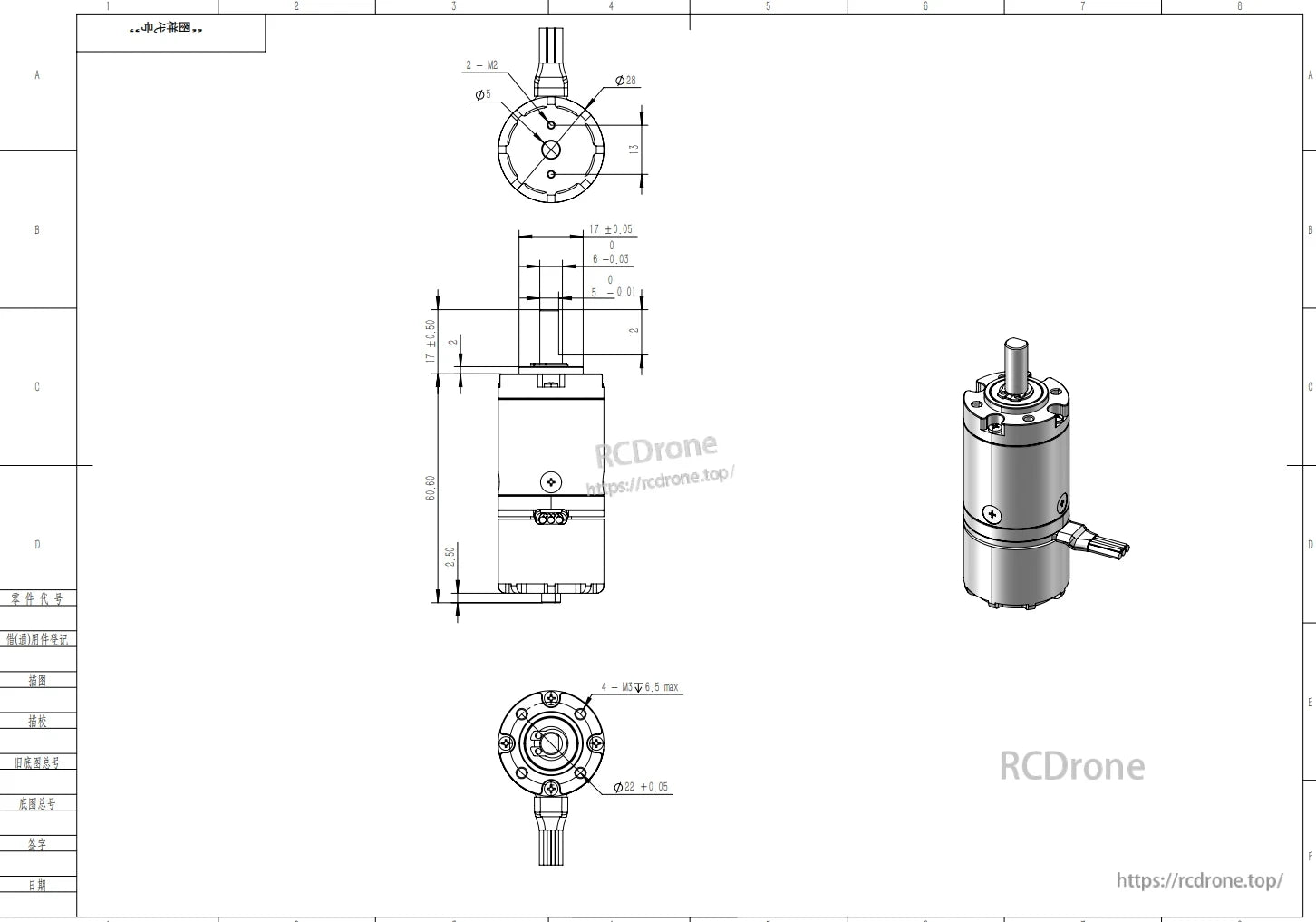
Mchoro wa kiufundi wa motor ya roboti ukiwa na vipimo na maelezo
Maelezo
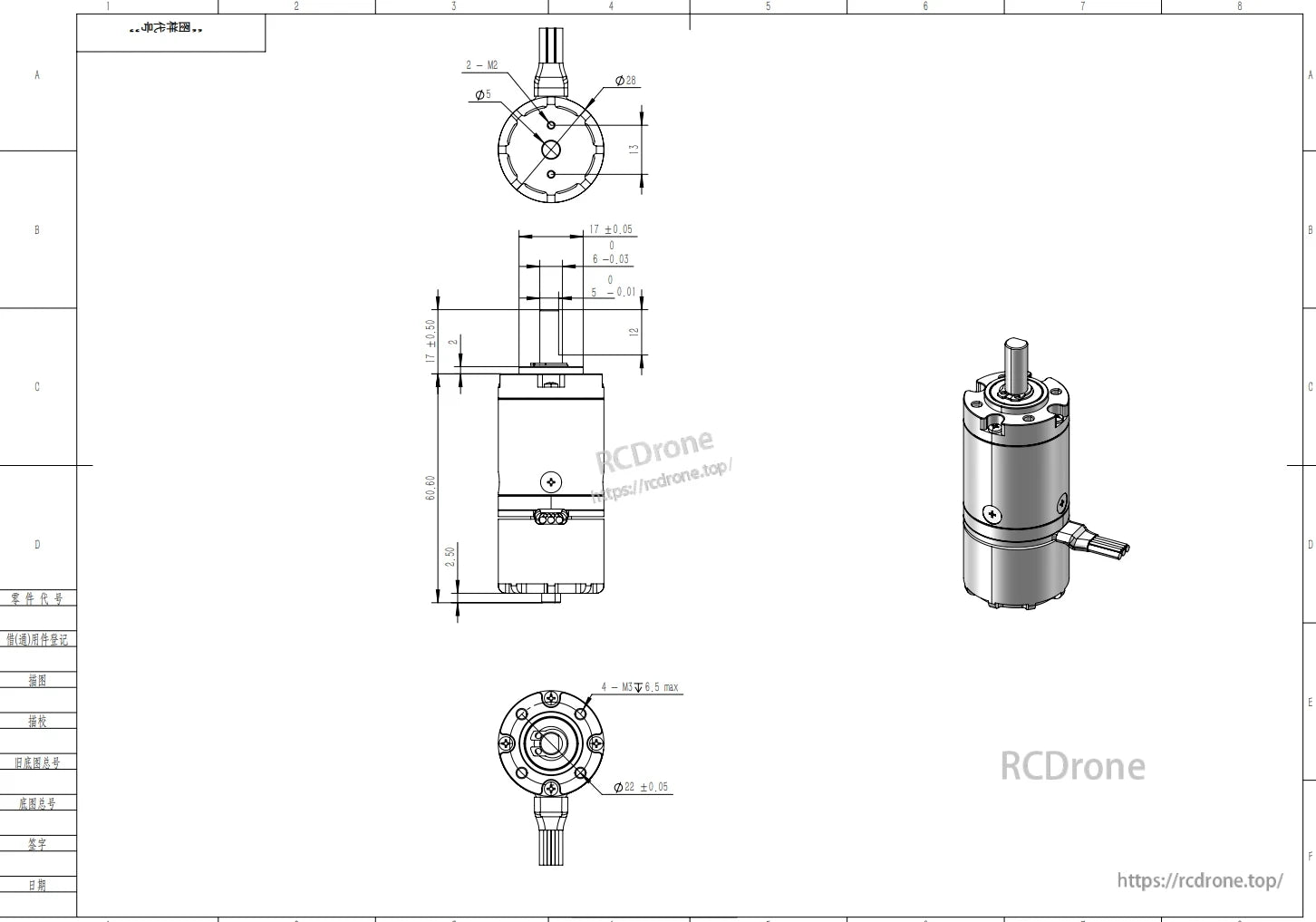
Mchoro wa kiufundi wa motor ya roboti ukiwa na vipimo na spesifikesheni

Mchoro wa kiufundi wa motor ya roboti ukiwa na vipimo na mtazamo wa 3D
Related Collections



