Droneer AI VisionCube Moduli ya Utambuzi wa AI kwa Ndege za FPV - Chaguzi za Kuonekana/ Kuonekana Mbili/ Joto (ST/DT)
Droneer AI VisionCube Moduli ya Utambuzi wa AI kwa Ndege za FPV - Chaguzi za Kuonekana/ Kuonekana Mbili/ Joto (ST/DT)
Droneer
Couldn't load pickup availability
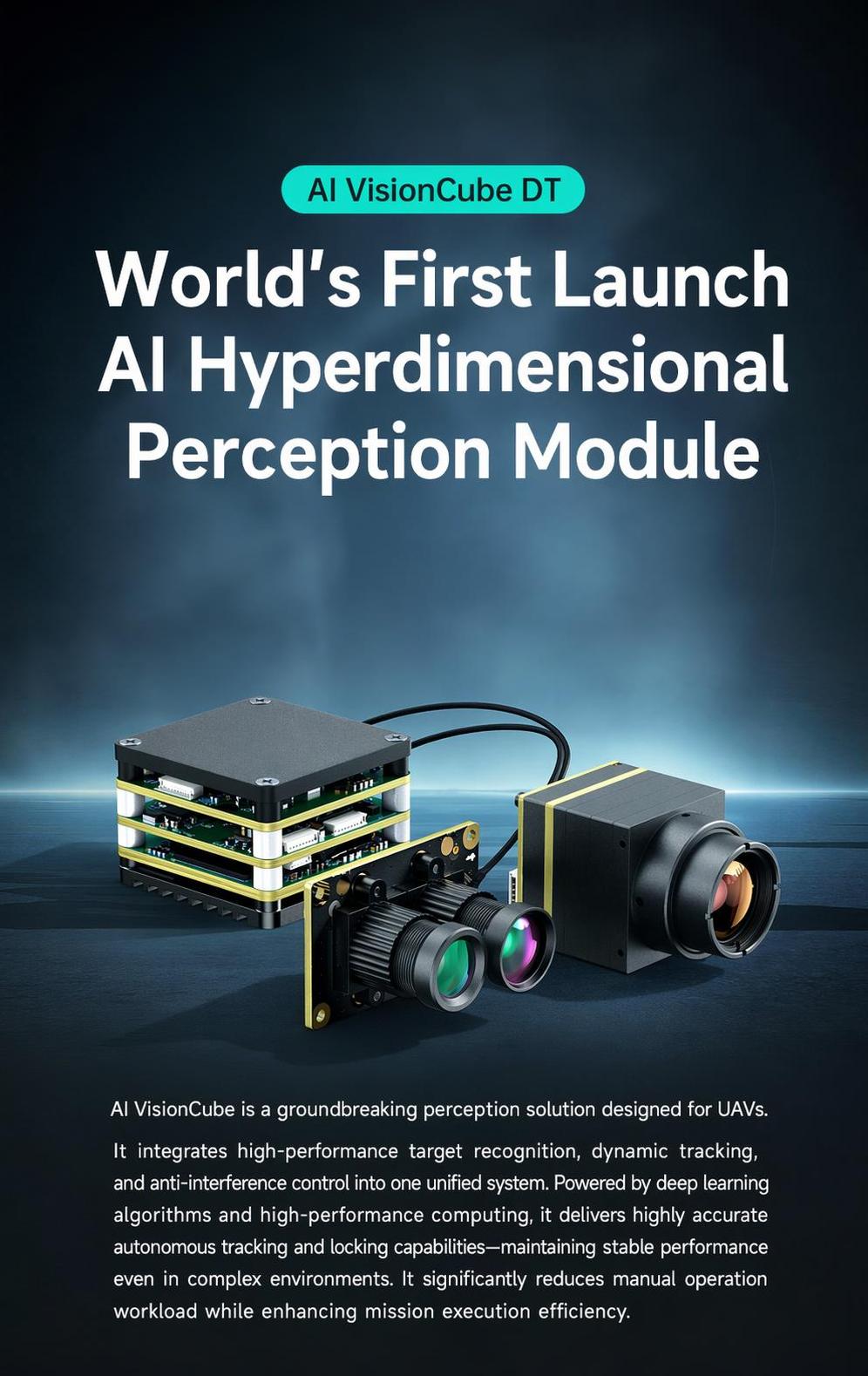
Muhtasari
Droneer AI VisionCube ni moduli ya ufahamu wa AI kwa drones za FPV, inapatikana katika muundo wa mwanga unaoonekana (moja/mwili) na muundo wa mwanga unaoonekana + joto. Kulingana na mfano uliochaguliwa, inatoa utambuzi wa ndani, ufuatiliaji wa dynamic, na kazi za kufunga lengo kwa matumizi ya angani, ikiwa na msaada wa onyesho la skrini (OSD).
Vipengele Muhimu
- Ujumuishaji mwepesi wa kila kitu; muundo wa moduli wenye uzito jumla <200g
- Inafaa na BetaFlight/ArduPilot na mifumo mingine ya kudhibiti ndege ya chanzo wazi
- Kamera ya hali ya juu yenye pato la video la ucheleweshaji wa chini sana (<60ms); hali ya Picha ndani ya Picha (PiP) iliyojengwa; ucheleweshaji wa mwisho hadi mwisho chini ya 60ms
- Funguo za msingi: 1.2km ultra-long range recognition, multi-target recognition, in-frame Picture-in-Picture, adaptive tracking, dynamic memory lock-on, multi-spectrum compatibility
- Muundo wa ufuatiliaji ndani ya picha: mtazamo wa mandhari wa skrini nzima na kuzoom kwa umeme mara 8 ndani
- Utambuzi wa malengo mengi: unapata nguvu kutoka kwa YOLOv7 iliyoboreshwa kwa undani wa utambuzi wa malengo mengi; inasaidia utambuzi wa malengo 50 ya nguvu na matumizi ya algorithimu za kujifunza binafsi
- Ufuatiliaji wa kiambatisho cha kunyonya kinachobadilika: kinashikilia lengo katikati ya picha kwa muda mfupi kama 0.5 sekunde; kiwango cha mafanikio ya kufunga lengo katika hali za kasi kubwa, za mabadiliko hadi 92%
- Kufunga kumbukumbu kwa njia ya mabadiliko: utabiri wa mwendo + chujio cha Kalman; upya wa kukamata baada ya lengo kufichwa/kuondoka kwenye uwanja wa mtazamo; utulivu wa kufuatilia umeimarishwa kwa 40%
- Upimaji wa multi-spectral (tofauti za joto): mabadiliko ya sensor ya mwanga unaoonekana / infrared; picha ya joto ya infrared isiyo na baridi; anuwai ya uendeshaji -20 C hadi 60 C
Chaguzi za Mfano
| Tofauti | Picha Inayoonekana | Picha ya Joto |
|---|---|---|
| AI VisionCube S | Lens moja inayoonekana | Hapana |
| AI VisionCube D | Lens mbili zinazoonekana | Hapana |
| AI VisionCube ST | Lens moja inayoonekana | Ndio (joto) |
| AI VisionCube DT | Lens mbili zinazoonekana | Ndio (joto) |
| AI ST Pro | Lens moja inayoonekana | Ndio ("640" joto, kulingana na jina la toleo) |
| AI DT Pro | Lens moja inayoonekana (kulingana na jina la toleo) | Ndio ("640" joto, kulingana na jina la toleo) |
Maelezo
Utambuzi & Ufuatiliaji (AI VisionCube S / D / ST / DT)
| Parameta | AI VisionCube S | AI VisionCube D | AI VisionCube ST | AI VisionCube DT |
|---|---|---|---|---|
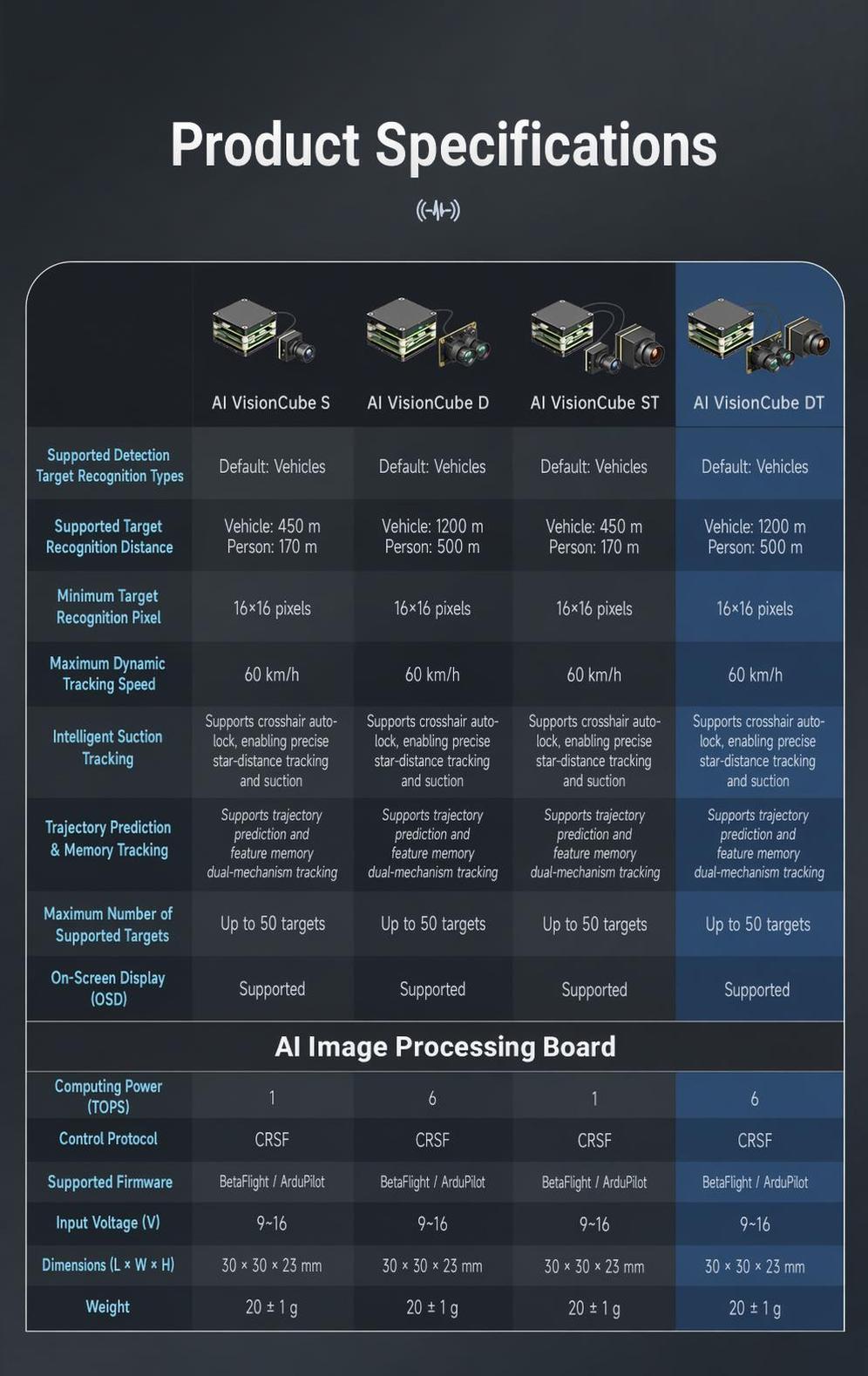
| Aina za utambuzi wa lengo zinazoungwa mkono | Chaguo la kawaida: Magari | Chaguo la kawaida: Magari | Chaguo la kawaida: Magari | Chaguo la kawaida: Magari |
| Umbali wa utambuzi wa lengo unaoungwa mkono | Gari: 450 m; Mtu: 170 m | Gari: 1200 m; Mtu: 500 m | Gari: 450 m; Mtu: 170 m | Gari: 1200 m; Mtu: 500 m |
| Pixel ya chini ya kutambua lengo | 16x16 pixels | 16x16 pixels | 16x16 pixels | 16x16 pixels |
| Kasi ya juu ya kufuatilia kwa nguvu | 60 km/h | 60 km/h | 60 km/h | 60 km/h |
| Kufuatilia kwa kunyonya kwa akili | Inasaidia kufunga kiashiria kiotomatiki, kuwezesha kufuatilia kwa usahihi umbali wa nyota na kunyonya | Inasaidia kufunga kiashiria kiotomatiki, kuwezesha kufuatilia kwa usahihi umbali wa nyota na kunyonya | Inasaidia kufunga kiashiria kiotomatiki, kuwezesha kufuatilia kwa usahihi umbali wa nyota na kunyonya | Inasaidia kufunga kiashiria kiotomatiki, kuwezesha kufuatilia kwa usahihi umbali wa nyota na kunyonya |
| Utabiri wa njia & kufuatilia kumbukumbu | Inasaidia utabiri wa njia na ufuatiliaji wa mfumo wa kipekee wa kumbukumbu ya kipengele | Inasaidia utabiri wa njia na ufuatiliaji wa mfumo wa kipekee wa kumbukumbu ya kipengele | Inasaidia utabiri wa njia na ufuatiliaji wa mfumo wa kipekee wa kumbukumbu ya kipengele | Inasaidia utabiri wa njia na ufuatiliaji wa mfumo wa kipekee wa kumbukumbu ya kipengele |
| Idadi ya juu ya malengo yanayosaidiwa | Hadi malengo 50 | Hadi malengo 50 | Hadi malengo 50 | Hadi malengo 50 |
| On-screen display (OSD) | Inasaidiwa | Inasaidiwa | Inasaidiwa | Inasaidiwa |
AI Image Processing Board
| Parameta | AI VisionCube S | AI VisionCube D | AI VisionCube ST | AI VisionCube DT |
|---|---|---|---|---|
| Nguvu ya kompyuta (TOPS) | 1 | 6 | 1 | 6 |
| Protokali ya udhibiti | CRSF | CRSF | CRSF | CRSF |
| Firmware inayoungwa mkono | BetaFlight / ArduPilot | BetaFlight / ArduPilot | BetaFlight / ArduPilot | BetaFlight / ArduPilot |
| Voltage ya kuingiza (V) | 9~16 | 9~16 | 9~16 | 9~16 |
| Vipimo (L x W x H) | 30 x 30 x 23 mm | 30 x 30 x 23 mm | 30 x 30 x 23 mm | 30 x 30 x 23 mm |
| Uzito | 20 1 g | 20 1 g | 20 1 g | 20 1 g |
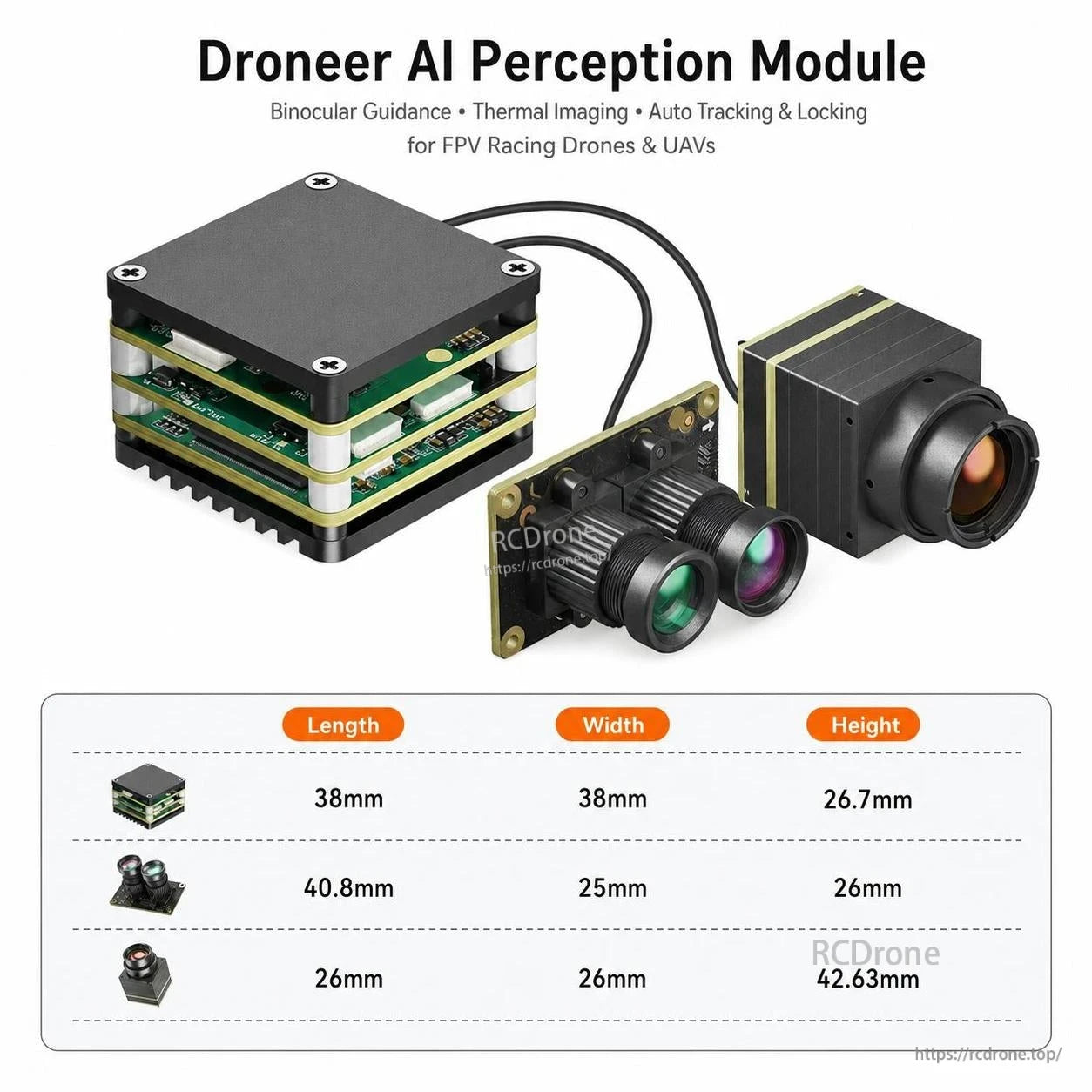
Mitambo
| Parameta | AI VisionCube S | AI VisionCube D | AI VisionCube ST | AI VisionCube DT |
|---|---|---|---|---|
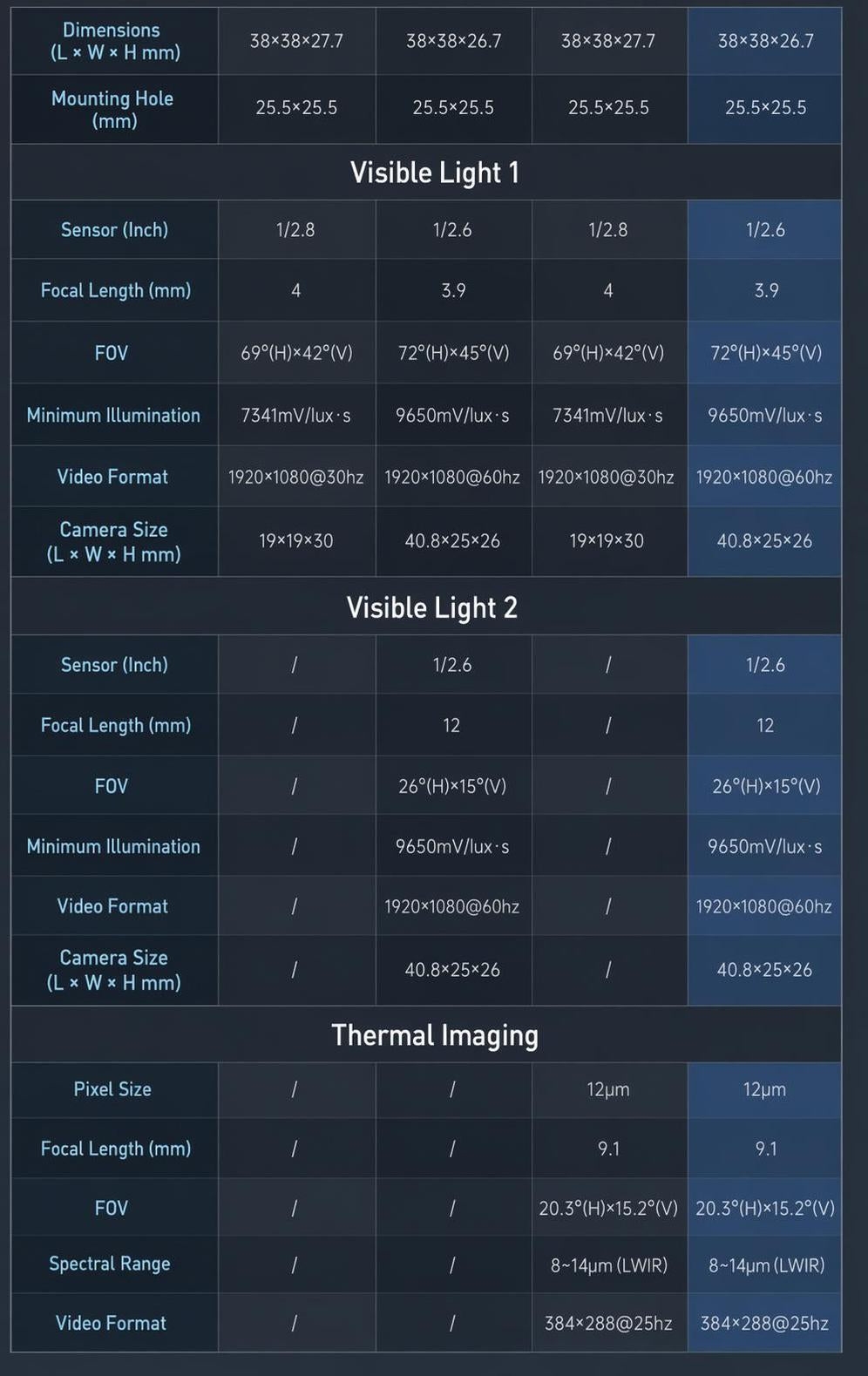
| Vipimo (L x W x H) | 38 x 38 x 27.7 mm | 38 x 38 x 26.7 mm | 38 x 38 x 27.7 mm | 38 x 38 x 26.7 mm |
| Shimo la kufunga | 25.5 x 25.5 mm | 25.5 x 25.5 mm | 25.5 x 25.5 mm | 25.5 x 25.5 mm |
Mwanga Unaonekana 1 Kamera
| Kigezo | AI VisionCube S | AI VisionCube D | AI VisionCube ST | AI VisionCube DT |
|---|---|---|---|---|
| Sensor (inchi) | 1/2.8 | 1/2.6 | 1/2.8 | 1/2.6 |
| Urefu wa focal (mm) | 4 | 3.9 | 4 | 3.9 |
| FOV | 69 (H)x42 (V) | 72 (H)x45 (V) | 69 (H)x42 (V) | 72 (H)x45 (V) |
| Mwanga wa chini | 7341 mV/luxs | 9650 mV/luxs | 7341 mV/luxs | 9650 mV/luxs |
| Muundo wa video | 1920x1080@30hz | 1920x1080@60hz | 1920x1080@30hz | 1920x1080@60hz |
| Ukubwa wa kamera (L x W x H) | 19 x 19 x 30 mm | 40.8 x 25 x 26 mm | 19 x 19 x 30 mm | 40.8 x 25 x 26 mm |
Mwanga Unaonekana 2 Kamera
| Kigezo | AI VisionCube S | AI VisionCube D | AI VisionCube ST | AI VisionCube DT |
|---|---|---|---|---|
| Sensor (inchi) | / | 1/2.6 | / | 1/2.6 |
| Urefu wa focal (mm) | / | 12 | / | 12 |
| FOV | / | 26 (H)x15 (V) | / | 26 (H)x15 (V) |
| Mwanga wa chini | / | 9650 mV/luxs | / | 9650 mV/luxs |
| Muundo wa video | / | 1920x1080@60hz | / | 1920x1080@60hz |
| Ukubwa wa kamera (L x W x H) | / | 40.8 x 25 x 26 mm | / | 40.8 x 25 x 26 mm |
Picha ya joto (AI VisionCube ST / DT)
| Parameta | AI VisionCube ST | AI VisionCube DT |
|---|---|---|
| Ukubwa wa pikseli | 12um | 12um |
| Urefu wa focal (mm) | 9.1 | 9.1 |
| FOV | 20.3 (H)x15.2 (V) | 20.3 (H)x15.2 (V) |
| Wigo la spectral | 8~14um (LWIR) | 8~14um (LWIR) |
| Muundo wa video | 384x288@25hz | 384x288@25hz |
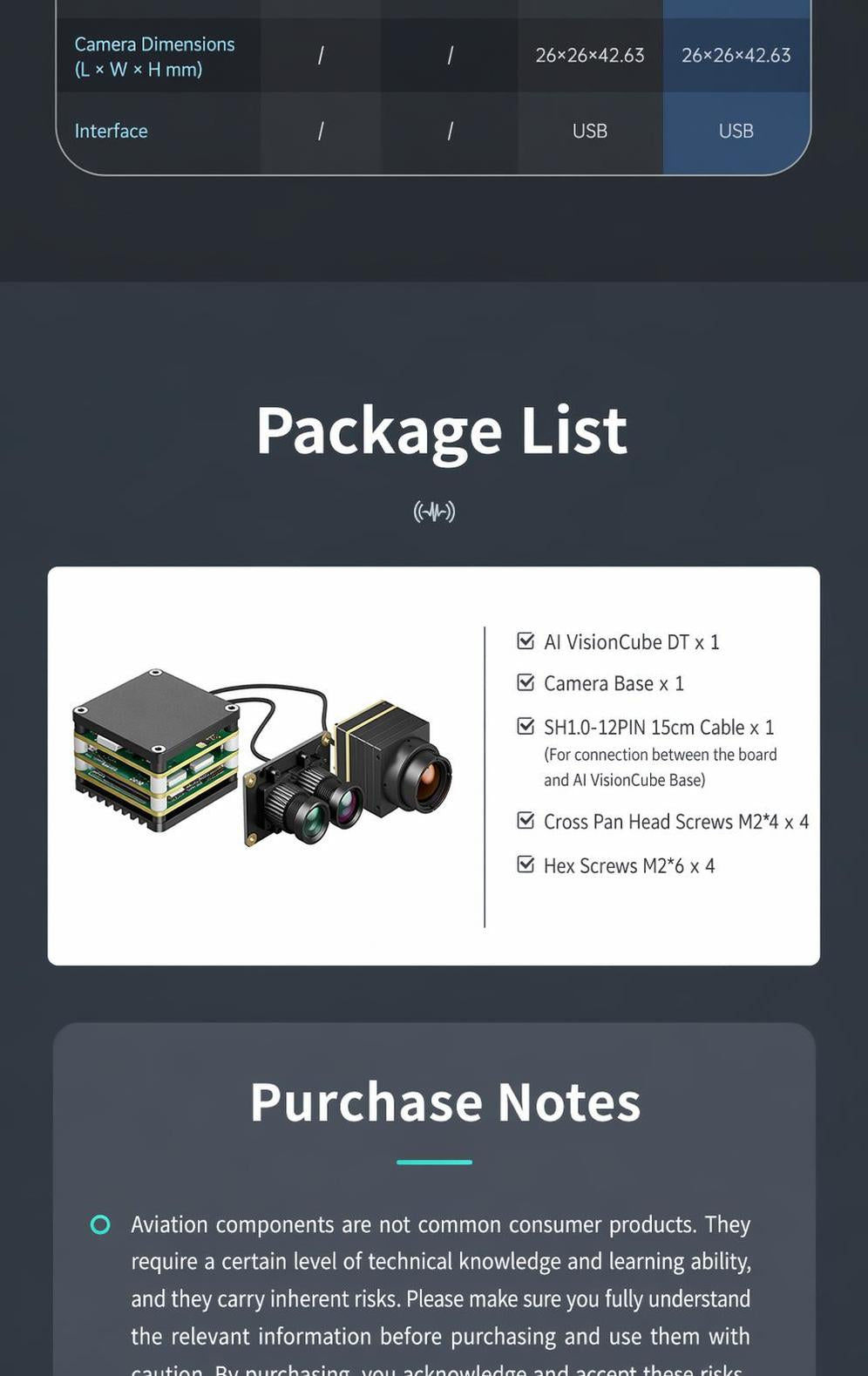
| Vipimo vya kamera (L x W x H) | 26 x 26 x 42.63 mm | 26 x 26 x 42.63 mm |
| Kiunganishi | USB | USB |
Kilichojumuishwa
Orodha ya kifurushi (AI VisionCube DT):
- AI VisionCube DT x 1
- Kifaa cha Kamera x 1
- SH1.0-12PIN 15cm Cable x 1 (kwa muunganisho kati ya bodi na AI VisionCube Base)
- Vichwa vya M2*4 vya Pan vya Msalaba x 4
- V screws vya Hex M2*6 x 4
Ulinganifu & Maelezo ya Mpangilio
- Mahitaji ya uunganisho (nyaya, ufungaji, na mpangilio wa programu) yanategemea jukwaa la drone na mfano uliochaguliwa.
- Kwa miradi maalum au ununuzi wa wingi, wasiliana na huduma kwa wateja kwa [email protected] or https://rcdrone.top/.
Maombi
- Uunganisho wa drone wa FPV unaohitaji utambuzi wa ndani, ufuatiliaji, na overlay ya OSD
- Drone za mbio za viwango vya tasnia zenye inchi 6 na cinewhoops za ultra-kidogo (ufungaji na tuning inaweza kuhitajika)
- Mitiririko ya kuonekana + ya joto (toleo la ST/DT) kwa operesheni ya mchana/usiku katika maeneo ya joto yanayoungwa mkono
Maelezo
Droneer AI VisionCube inaletewa mtazamo wa ndani kwa drones za FPV zenye utambuzi, ufuatiliaji, na vipengele vya kufunga lengo pamoja na msaada wa OSD.

Muundo wa moduli, mwepesi unachanganya mfumo wa kamera na usindikaji wa picha wa AI kwa ufungaji wa haraka kwenye ujenzi wa kompakt.

Majukumu ya msingi ni pamoja na utambuzi wa mbali, ugunduzi wa malengo mengi, picha ndani ya picha, na ufuatiliaji unaobadilika.

Utambuzi wa mbali umeundwa kwa hali za angani ambapo utambuzi wa mapema na ufuatiliaji thabiti ni muhimu.
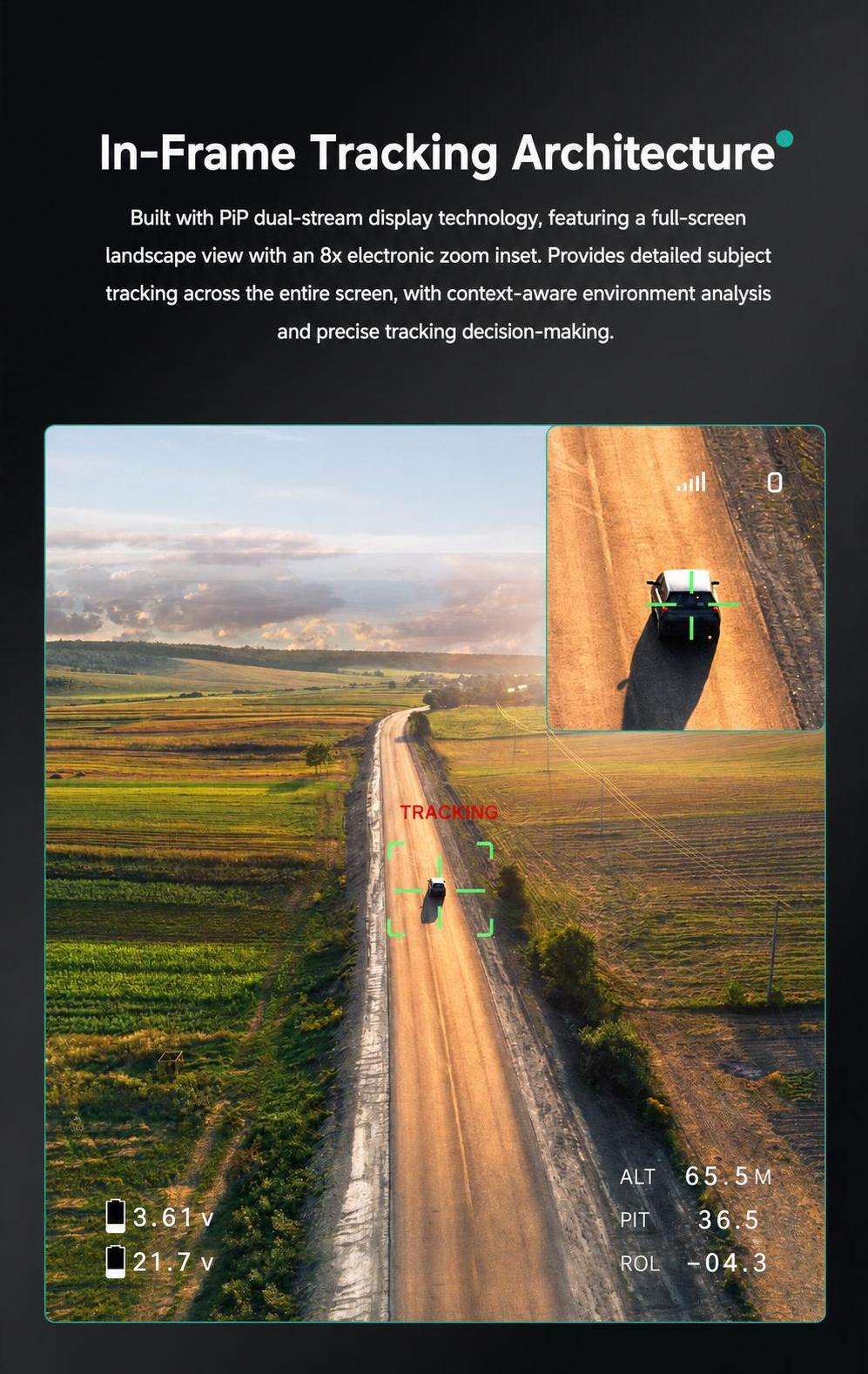
Ufuatiliaji wa ndani unashikilia mtazamo mpana wa mandhari huku ukitumia dirisha la kuzoom ili kudumisha ufahamu wa lengo.
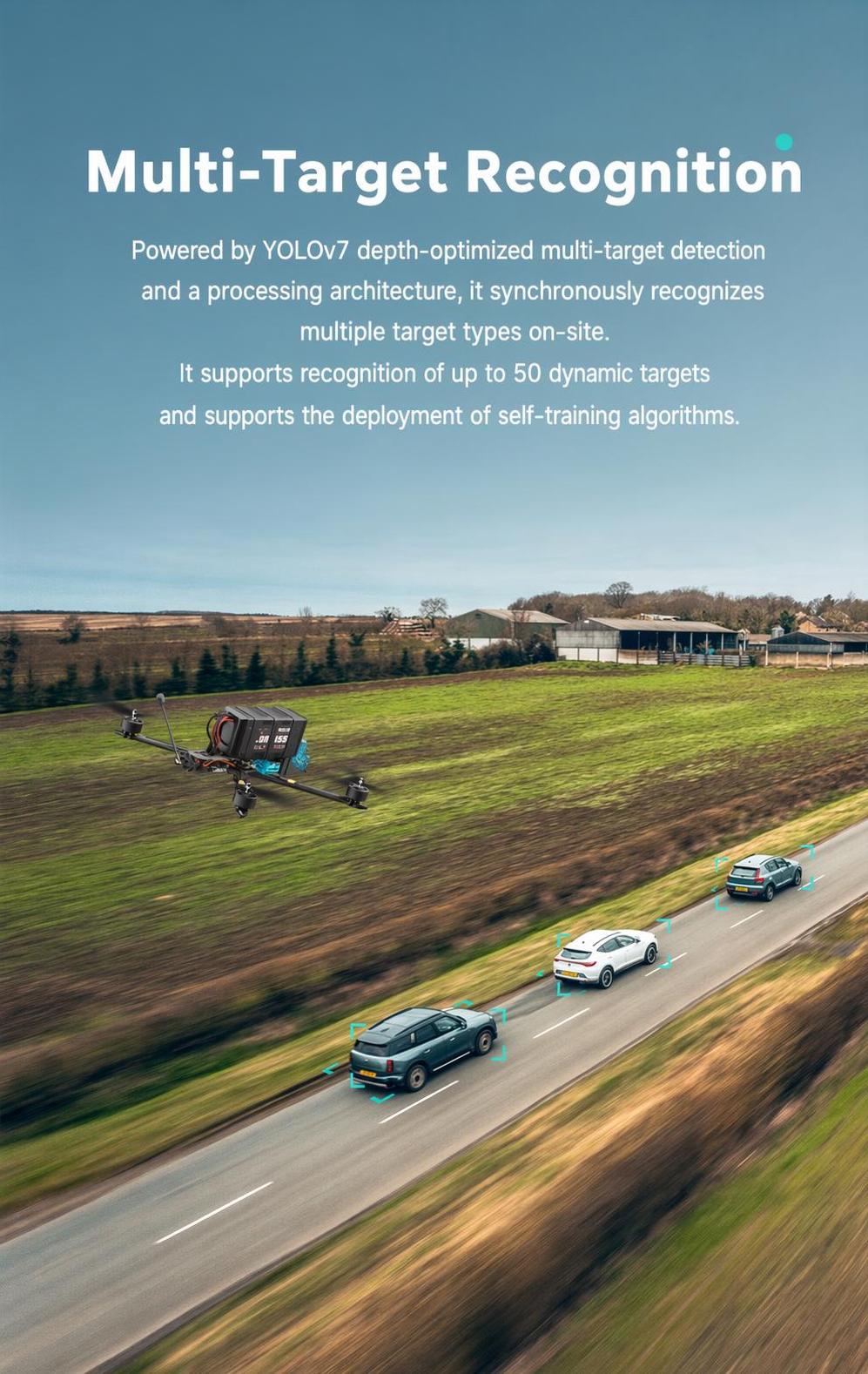
Ugunduzi unaotegemea YOLOv7 unasaidia malengo mengi katika scene moja kwa mazingira ya dinamik.
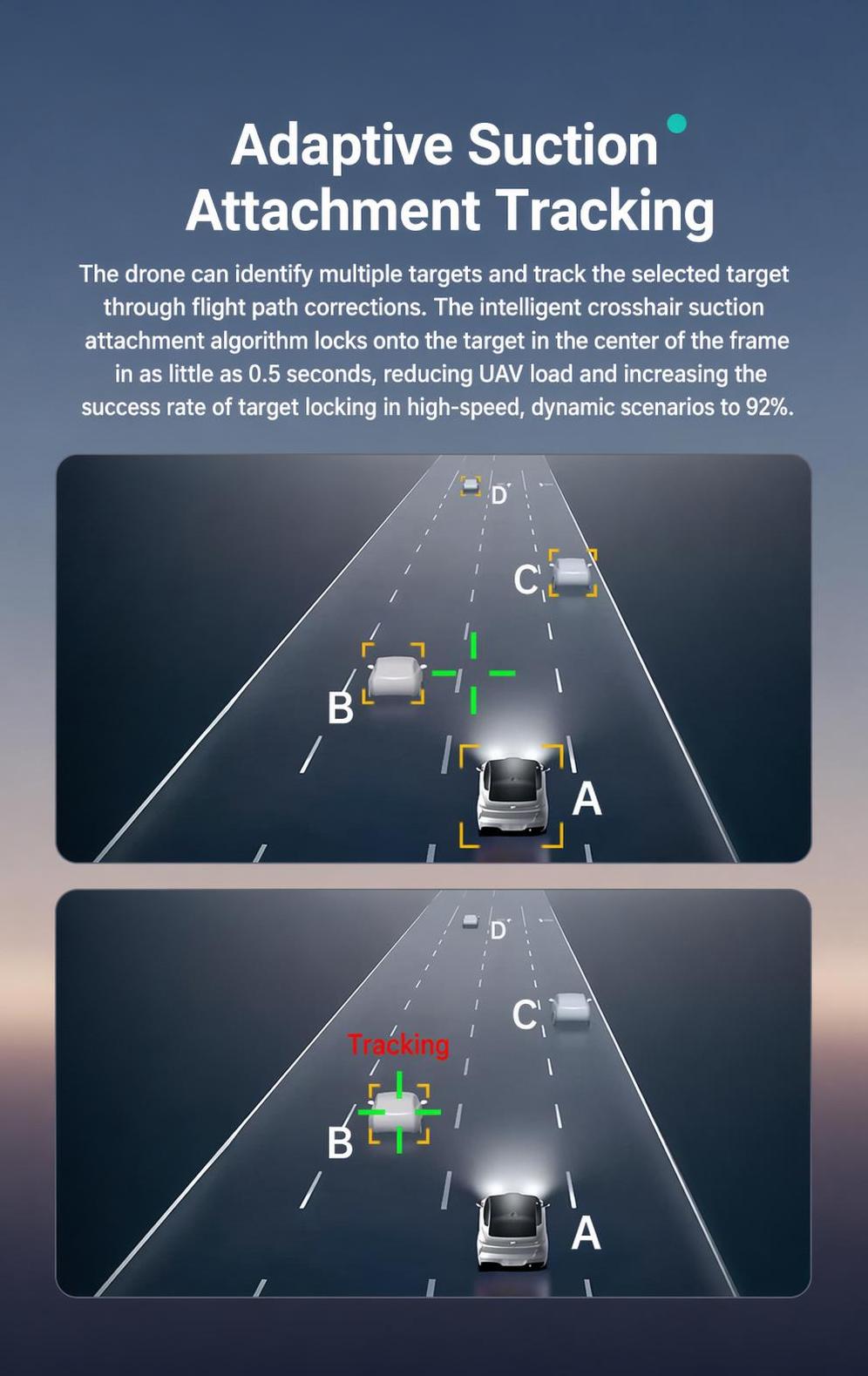
Ufuatiliaji wa kubadilika unapa kipaumbele lengo la katikati ya fremu kwa haraka ya kufunga wakati wa mwendo wa kasi.
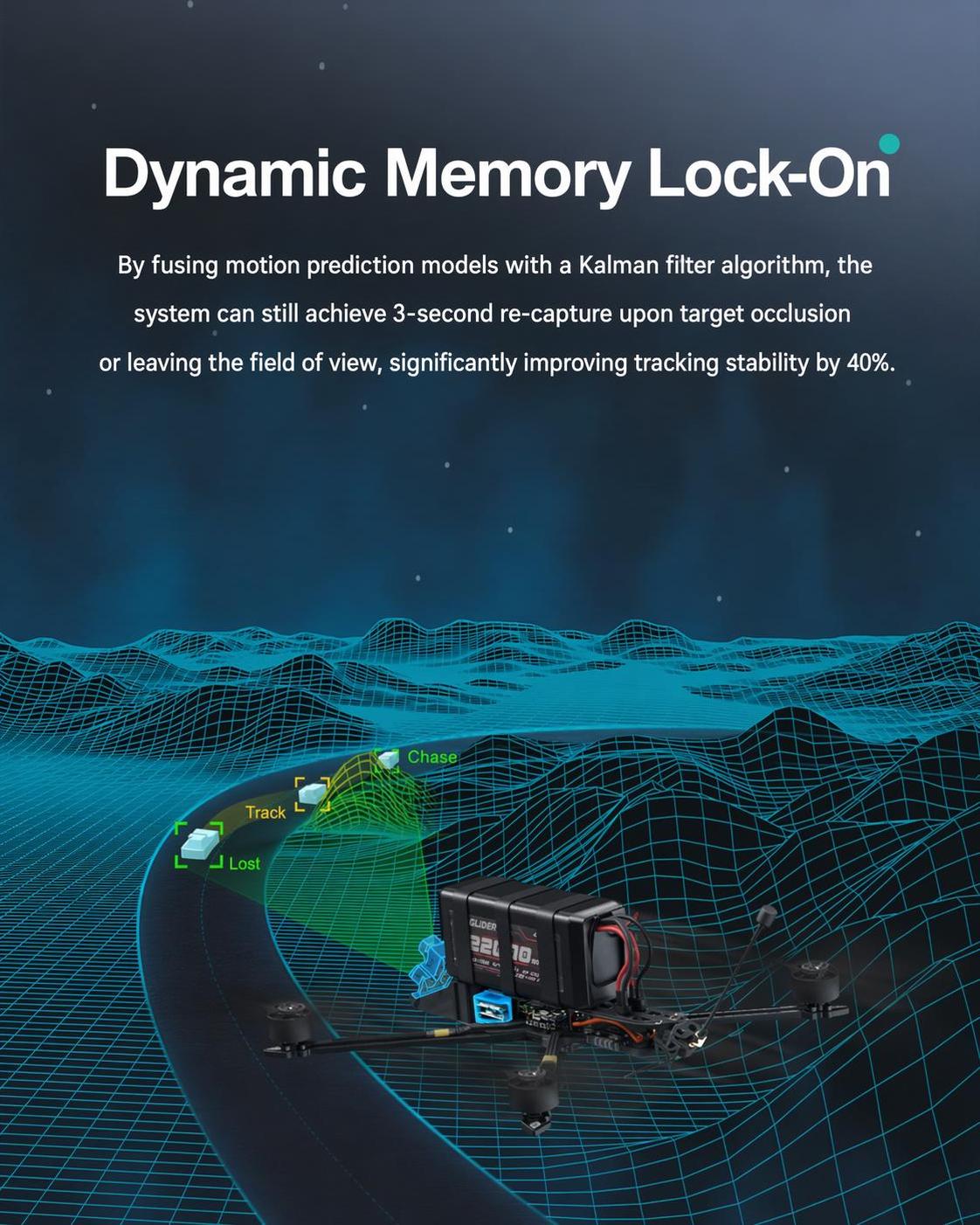
Kufunga kumbukumbu ya dinamik husaidia kurejesha lengo baada ya kufichwa kwa muda mfupi au wakati linapoondoka kwenye fremu.
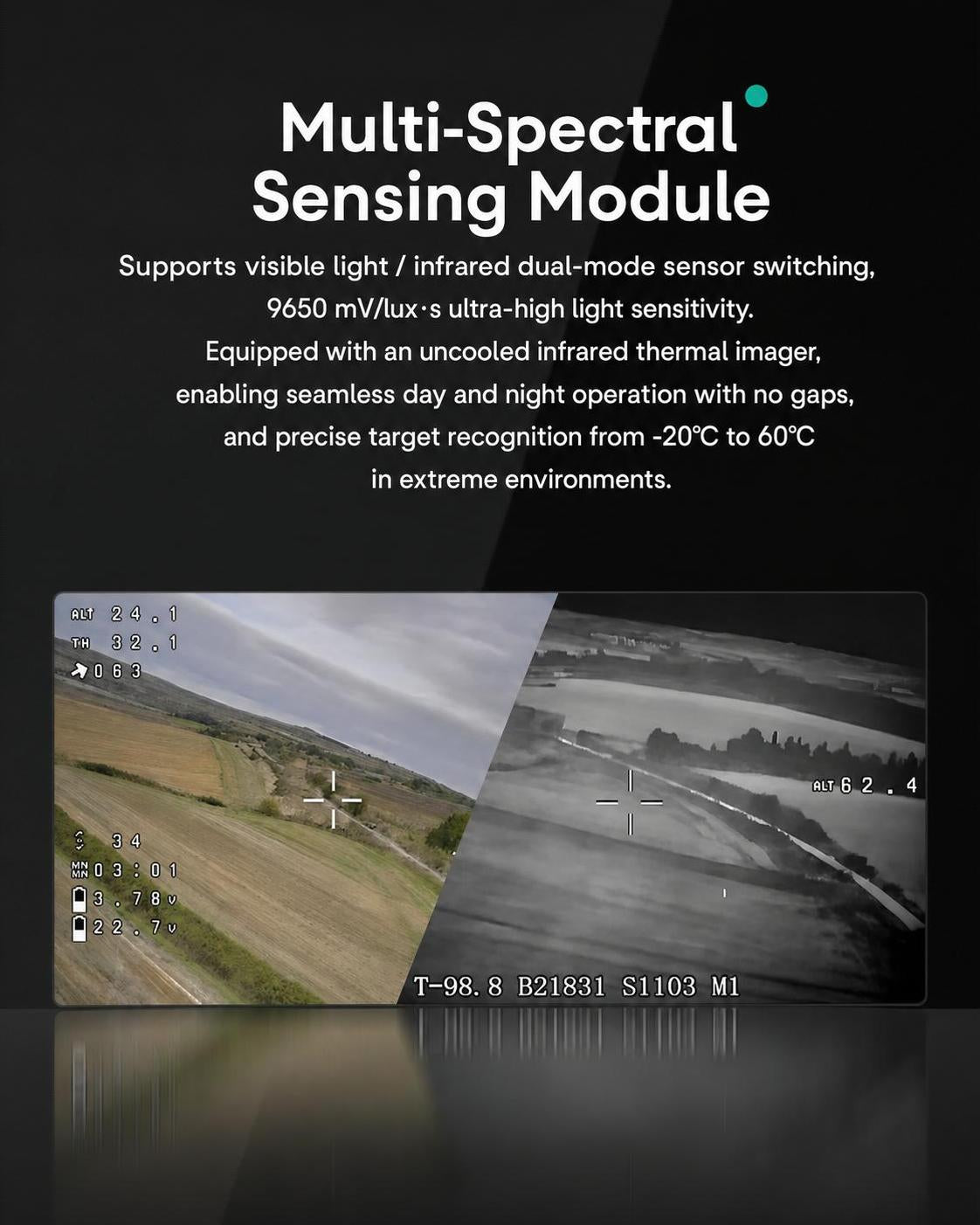
Tofauti za joto zinasaidia kubadilisha kati ya sensorer za mwonekano na infrared ili kuongeza ufahamu katika hali za mwangaza tofauti.
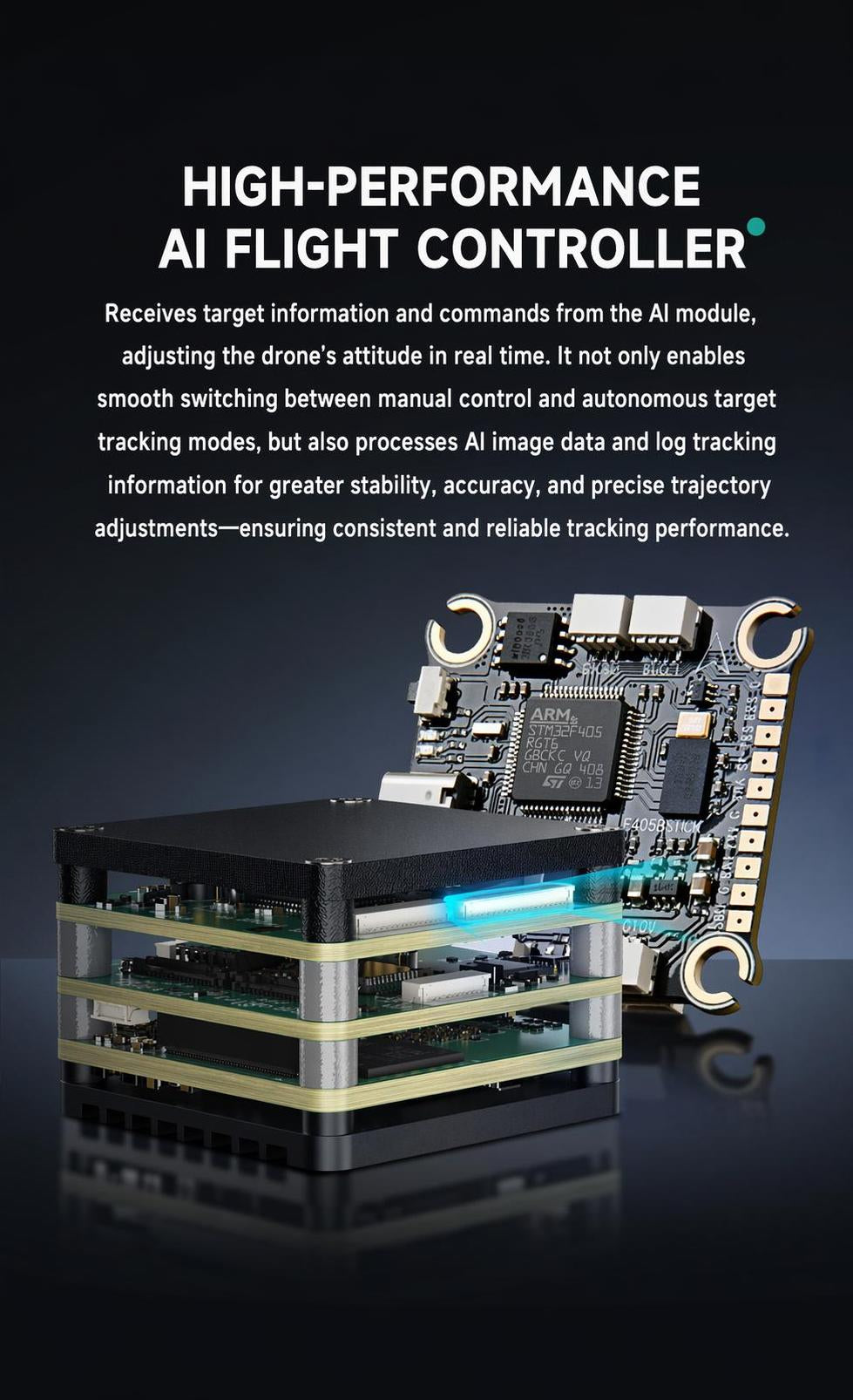
Kidhibiti cha ndege cha AI kinachakata data za ufuatiliaji na kusaidia kuratibu ufuatiliaji wa kiotomatiki na udhibiti wa mikono.
Linganisha chaguzi za modeli kwa haraka ili kulinganisha usanidi wa kamera na upeo wa kutambua na ujenzi wako.
Maelezo ya kina ya kamera yanashughulikia chaguzi za lenzi za mwanga unaoonekana na vigezo vya picha za joto inapofaa.
Kila seti inajumuisha moduli ya VisionCube, msingi wa kamera, kebo ya kuunganisha, na vifaa vya kufunga.
Related Collections