F450-4B Raspberry Pi Kit Inayoweza Kuratibiwa ya Ukuzaji wa Drone - Pixhawk DIY Ardupilot Industrial Open Source Platforms Drone
F450-4B Raspberry Pi Kit Inayoweza Kuratibiwa ya Ukuzaji wa Drone - Pixhawk DIY Ardupilot Industrial Open Source Platforms Drone
RCDrone
Couldn't load pickup availability
Muhtasari
The F450-4B Raspberry Pi Drone ni ya juu Vifaa vya DIY Drone ambayo inachanganya nguvu Raspberry Pi 4B kompyuta kwenye ubao yenye matumizi mengi Kidhibiti cha ndege cha Pixhawk 2.4.8, na kuifanya iweze kubinafsishwa sana na drone inayoweza kupangwa jukwaa. Hii Jukwaa la Drone la chanzo wazi inasaidia zana za kisasa kama Dronekit-python, kuwezesha wasanidi programu kuunda misheni zinazojitegemea, utumaji data kwa wakati halisi, na programu za kuchakata picha zinazoendeshwa na AI. Ikiwa na fremu thabiti ya 450mm, kamera ya 200MP HD, betri ya 3S 5200mAh kwa hadi dakika 20 ya kukimbia, na hali za juu za ndege kama vile kushikilia mwinuko, kurudi nyumbani, na hali ya mduara, F450 Drone Kit ni chaguo bora kwa wapendaji, watafiti, na waelimishaji wanaotafuta uzoefu wa ubunifu wa ukuzaji wa drone.
Sifa Muhimu
Vifaa vya Utendaji wa Juu
- Raspberry Pi 4B: Inaendeshwa na kichakataji cha 64-bit 1.5GHz quad-core, kinachoauni video ya 4K towe na mawasiliano ya WiFi ya kasi ya juu kwa uendeshaji unaotegemewa.
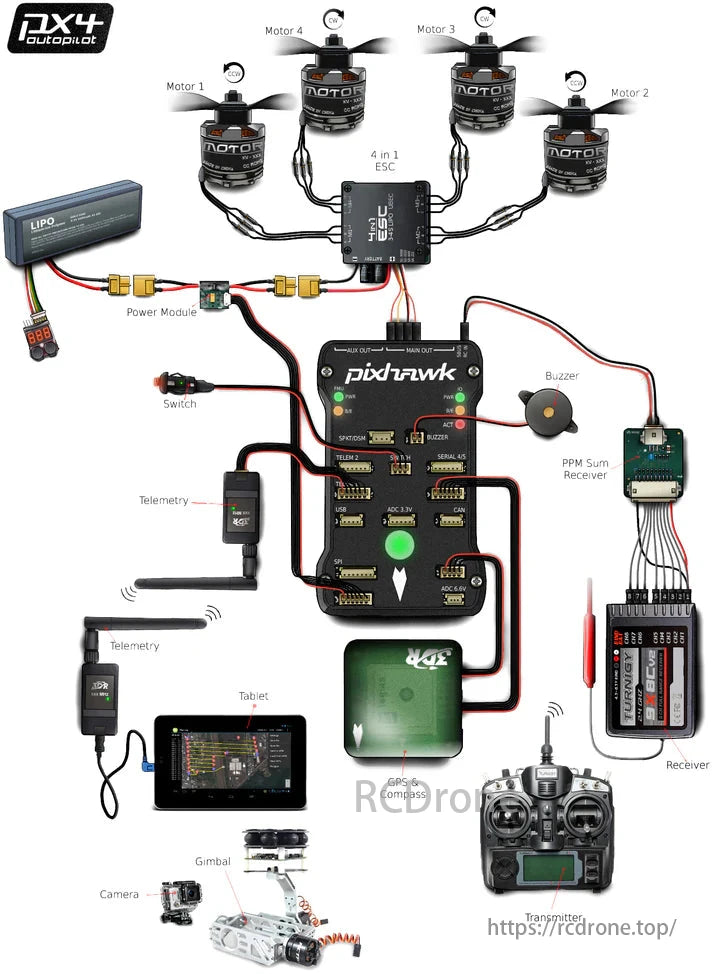
- Pixhawk 2.4.8 Kidhibiti cha Ndege: Ina vihisi vingi vilivyounganishwa, vinavyohakikisha udhibiti sahihi wa mtazamo, kuelea, na upangaji wa misheni.
- Usaidizi wa Upanuzi wa Maono: Ikioanishwa na kamera moja na zana za OpenCV, seti hii inakidhi mahitaji ya uwasilishaji na usindikaji wa picha katika wakati halisi.
Njia Mbalimbali za Ndege
- Kushikilia Altitude (AltHold): Hudumisha mwinuko thabiti wa ndege.
- Elea juu: Hutoa sahihi stationary hovering.
- Rudi Nyumbani (Rudi): Hurudi kiotomatiki mahali pa kuanzia wakati wa kupoteza mawimbi au betri kidogo.
- Kutua (Ardhi): Hutekeleza kutua kwa uhuru bila mpangilio.
- Hali ya Kuimarisha: Hurekebisha mtazamo wa ndege kiotomatiki.
- Hali ya Mduara: Hufanya safari za ndege za mzunguko karibu na lengo.
- Hali isiyo na kichwa: Huondoa vikwazo vya mwelekeo kwa udhibiti rahisi.
- Kurudi nje ya Udhibiti: Hurudi kwenye eneo lililowekwa tayari wakati mawimbi yanapotea.
- Kutua kwa Nguvu ya Chini: Inatua kwa usalama wakati wa hali ya chini ya betri.
Usambazaji wa Data na Usindikaji wa Picha
- Huanzisha mtandao wa ndani wa WiFi kupitia mtandaopepe uliojengewa ndani bila kuhitaji vipanga njia vya nje, kuwezesha data ya wakati halisi na utumaji picha.
- Inaauni utiririshaji wa video unaotegemea OpenCV na uchanganuzi, bora kwa ufuatiliaji wa picha na programu mahiri.
Vipimo
Vigezo vya Drone
| Kigezo | Maelezo |
|---|---|
| Jina | Seti isiyo na rubani ya F450 |
| Msingi wa magurudumu | 450 mm |
| Uzito | 1493g (yenye betri na Raspberry Pi 4B) |
| Kidhibiti cha Ndege | Pixhawk 2.4.8 kidhibiti cha njia huria cha ndege |
| Kompyuta ya Onboard | Raspberry Pi 4B |
| Kamera | 200MP HD 1080P |
| Usaidizi wa Kuelea | Moduli ya mtiririko wa macho na sensor ya umbali wa laser |
| Moduli ya GPS | m8n GPS |
| Wakati wa Ndege | ~dakika 20 (kulingana na mazingira na dhamira) |
| Betri | 3S 5200mAh (11.1V) |
| Uwezo wa Upakiaji | 500g |
| Upinzani wa Upepo | Kiwango cha 3-4 |
| Injini | SunnySky A2212 |
| ESC | Hobbywing 20A ESC (inaauni betri za 3S-4S LiPo) |
| Propela | T1045 propellers za kujifunga |
| Urefu wa Juu | 2000m (bila kuingiliwa) |
| Masafa ya Ndege | 1000m |
| Matukio ya Ndege | Ndani / Nje |
Viainisho vya Kidhibiti cha Ndege cha Pixhawk 2.4.8
- Kichakataji: 32-bit ARM STM32F427 Cortex M4, 168MHz, RAM ya 256KB
- Sensorer:
- Gyroscope ya L3GD20 3-mhimili wa 6DOF
- LSM303D mhimili 3 accelerometer/magnetometer ya 3-bit
- MPU6000 6-axis accelerometer/magnetometer
- Barometer ya MS5611 ya usahihi wa juu
- Utangamano wa Udhibiti wa Ardhi: QGroundControl, MissionPlanner
- Vipimo: 81mm x 47mm x 16mm; Uzito: 37g
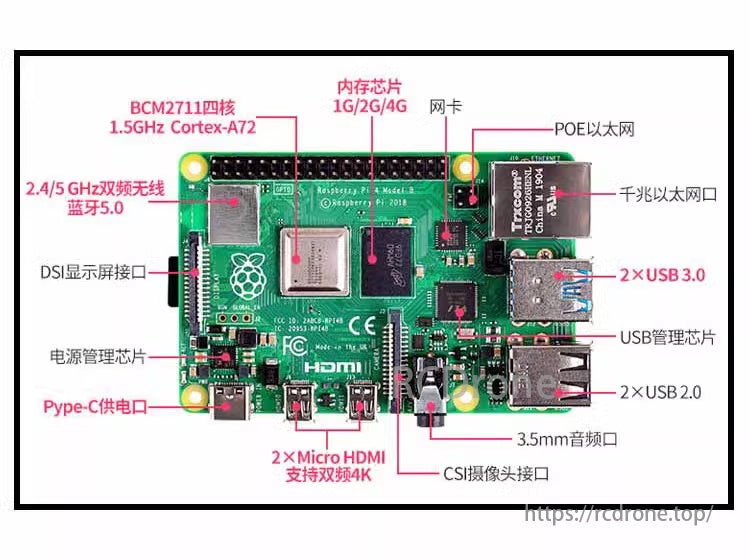
Vipimo vya Raspberry Pi 4B
- Chipset: Broadcom BCM2711
- CPU: 64-bit 1.5GHz quad-core
- GPU: 500MHz VideoCore VI
- RAM: 4GB DDR4
- Violesura: 2 x USB 3.0, 2 x USB 2.0
- Pato la Video: Bandari za HDMI ndogo mbili, inasaidia 4K@60Hz
- Mawasiliano: Bluetooth 5.0, WiFi 5 (2.4/5GHz)
- Ugavi wa Nguvu: USB Type-C (5V 3A)
Kifurushi kinajumuisha
Usanidi wa 1: SunnySky A2212 Motor yenye Kidhibiti cha Mbali cha FlySky i6 na Telemetry
- F450 frame na vifaa vya kutua
- Motors za SunnySky A2212 (pcs 4)
- Hobbywing 20A ESCs (pcs 4)
- Propela za kujifunga za T1045 (jozi 4)
- Moduli ya GPS ya PIX M8n
- Sahani ya unyevu-mtetemo
- Kidhibiti cha mbali cha FlySky i6
- Betri ya 3S 5200mAh
- B3 kusawazisha chaja
- GPS mlima
- Moduli ya telemetry ya voltage ya FS

Imejumuishwa: Kamba za betri, viunga vya kebo za nailoni, pedi za mbao, mkanda wa kunata wa 3M, buzzer, zana za usakinishaji.
Kusanya na kurekebisha video, nyenzo zinazohusiana zinazotolewa; wasiliana na huduma kwa wateja kwa msimbo wa chanzo.
Usanidi wa 2: SunnySky A2212 Motor yenye Radiolink PRO
- F450 frame na vifaa vya kutua
- Motors za SunnySky A2212 (pcs 4)
- Hobbywing 20A ESCs (pcs 4)
- Propela 9450 za kujifungia (jozi 3)
- PIX.Seti ya moduli ya M8n GPS
- Sahani ya unyevu-mtetemo
- Radiolink PRO (Kipokezi cha R9DS)
- Betri ya kudhibiti 3S 2200mAh
- Betri ya 3S 5200mAh
- B3 kusawazisha chaja
- GPS mlima

Imejumuishwa: Kamba za betri, viunga vya kebo za nailoni, pedi za mbao, mkanda wa kunata wa 3M, buzzer, zana za usakinishaji.
Kusanya na kurekebisha video, nyenzo zinazohusiana zinazotolewa; wasiliana na huduma kwa wateja kwa msimbo wa chanzo.
Mkutano wa Kifurushi cha F450
Matukio ya Maombi
F450-4B Drone Development Kit ni bora kwa:
- Drone R&D: Utafiti wa chuo kikuu, upimaji wa kidhibiti cha ndege, ukuzaji wa algorithm.
- Maombi ya Akili: Upangaji wa njia, utambuzi lengwa, na kuepusha vizuizi.
- Majaribio ya Kielimu: Kupanga, kuunganisha maunzi, na utatuzi.
- Matumizi ya shamba: Kuelea ndani ya nyumba, uchunguzi wa nje, ufuatiliaji wa kilimo, na zaidi.
Maelezo
F450-4B Raspberry Pi Drone Development Platform
F450 ni modeli ya kawaida na inayotumika sana, inayotoa mkusanyiko rahisi na unaofaa, utendakazi wa gharama ya juu, utendakazi thabiti, na ufaao kwa wanaoanza kuanza haraka na utendakazi wa ndege zisizo na rubani.

Raspberry Pi 4B iliyoboreshwa
Nguvu ya usindikaji wa maunzi ya Raspberry Pi 4B ina nguvu zaidi kuliko 3B+.
Raspberry Pi imewekwa na mfumo wa hivi karibuni wa chanzo-wazi Ubuntu 20.04, inayotoa uzoefu rahisi zaidi ikilinganishwa na mfumo wa Ubuntu Mate.

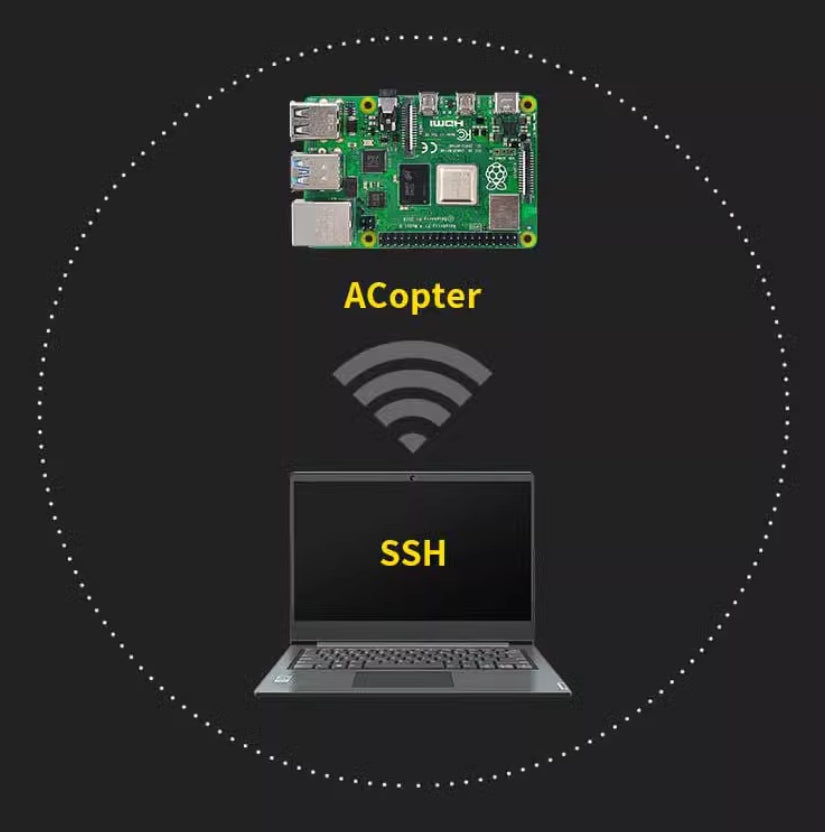
WiFi Hotspot (Acopter) Imewezeshwa na Mfumo
Kwa kutumia uwezo wa WiFi wa Raspberry Pi 4B, mtandao-hewa uliojijengea (Acopter) huundwa. Kompyuta inaweza kuunganishwa moja kwa moja kwenye mtandao-hewa wa WiFi wa 4B ili kuunda mtandao wa ndani na kutumia amri za SSH kwa ufikiaji wa mbali kwa Raspberry Pi. Tofauti na modeli ya 3B+ ambayo inahitaji kipanga njia kwa ajili ya usanidi wa mtandao, usanidi huu ni rahisi zaidi na wa kirafiki zaidi kwa wanaoanza.
OpenCV Visual Processing
Kamera ya monocular imeongezwa, kuwezesha uwasilishaji wa picha na usindikaji baada ya usindikaji. Mitiririko ya video inaweza kunaswa kupitia Raspberry Pi na kuchakatwa kwa kutumia zana kama OpenCV. Mitiririko ya video ya HD katika muda halisi pia inaweza kutumwa kwa Kompyuta ili kuchakatwa au kwa simu ya mkononi ili kutazamwa.

Kiolesura Zaidi cha Upanuzi
Raspberry Pi 4B inatoa anuwai ya violesura vya upanuzi, ikijumuisha bandari mbili za USB 3.0, bandari mbili ndogo za 4K HDMI, violesura vya CSI na DSI, gigabit Ethernet, na usambazaji wa umeme wa Aina ya C, ikitoa uwezo wa kipekee wa matumizi mbalimbali.
Toleo la Kamera Moja
Toleo la kamera moja linajumuisha Raspberry Pi 4B na kamera ya monocular, inayowezesha mawasiliano kupitia mlango wa mfululizo na kidhibiti cha ndege. Inasaidia kazi kama vile usindikaji wa kuona, programu ya Python, na mawasiliano. Toleo hili linafaa kwa watumiaji walio na uzoefu wa awali wa kutumia Pixhawk, maarifa ya kimsingi ya Ubuntu (Linux), OpenCV, Raspberry Pi, na mawasiliano ya mtandao wa eneo la karibu.
Mbali na vipengele vya msingi, toleo la kamera moja inasaidia upitishaji wa picha na data kupitia WiFi na inaruhusu udhibiti wa drone kupitia. Dronekit-python kupanga programu.

Nafasi ya Mtiririko wa Macho
Udhibiti wa Kuelea wa Ndani na Dronekit-python Chini ya Masharti ya Kuweka Mtiririko wa Macho

Jukwaa hili la ukuzaji wa drone inasaidia ROS, Programu ya Python, Utambuzi wa picha ya OpenCV, Usambazaji wa 4G wa umbali mrefu, na Kutua kwa mwongozo wa kuona kwa Aruco 2D, kuifanya iwe ya aina nyingi na ya ubunifu.

Kidhibiti cha Mbali cha FlySky i6
Ina kipokezi cha ia6b kilichopakiwa awali na programu dhibiti ya idhaa 10, moduli ya telemetry ya volteji, na masafa ya udhibiti wa mbali wa zaidi ya 1000m, bora kwa wanaoanza kujifunza na kufanya mazoezi.

Kidhibiti cha Mbali cha Radiolink AT9S
Inaangazia chaneli 10 zilizo na safu ya udhibiti ya zaidi ya 2000m. Ina moduli ya telemetry ambayo hutoa data juu ya voltage ya betri, hesabu ya satelaiti ya GPS, urefu wa ndege, viwianishi, hali ya ndege na zaidi.

Maswali Yanayoulizwa Mara kwa Mara
1. Je, ninaweza kufanya maendeleo ya sekondari? Je, ninaweza kujipanga kwa kujitegemea?
Jibu ni ndiyo. Kama ilivyoletwa hapo awali, Ardupilot kwa sasa ndiyo mfumo wa udhibiti wa ndege wa njia huria unaotumiwa zaidi, na mifano mingi bora ya ndani na nje ya nchi hutengenezwa kwa msingi wa mfumo huu.
Maendeleo ya sekondari hasa ina mwelekeo mbili: maendeleo ya udhibiti wa ndege na upanuzi wa nje.
- Maendeleo ya Udhibiti wa Ndege
Tunatumia Ardupilot, kwa hivyo kujifunza ukuzaji wa udhibiti wa ndege wa tovuti huria huhusisha hasa kusoma mradi wa programu huria wa Ardupilot.
- Ustadi madhubuti wa upangaji unahitajika (msimbo wa chanzo uko katika C++), pamoja na ujuzi wa hisabati ya hali ya juu (hesabu tofauti, kurudia, kuweka mstari), uchujaji wa Kalman, na ukuzaji uliopachikwa.
- Msingi thabiti wa kinadharia unahitajika. Hii hukutayarisha kwa ajili ya kufanyia kazi uundaji wa mifumo isiyo na rubani na R&D ya udhibiti wa safari za ndege.
Ikiwa unataka kuzingatia ukuzaji wa udhibiti wa ndege, kazi nyingi zinahitaji kufanywa kwenye kompyuta yako:
- Kuweka mazingira ya programu, kupakua msimbo wa chanzo cha udhibiti wa ndege, kujifunza usanifu wake na moduli za kazi, nk.
- Mara tu unapofahamu mfumo wa msimbo, unaweza kuanza programu kulingana na msimbo uliopo.
Anza na muundo msingi wa udhibiti wa safari za ndege na urejelee kitabu cha udhibiti wa safari za ndege cha Ardupilot tunachotoa kwa mwongozo.
- Maendeleo ya Upanuzi wa Nje
Upanuzi wa nje hukuruhusu kuongeza vifaa vya nje kulingana na kazi na matukio yako kupitia violesura vilivyohifadhiwa vya kidhibiti cha ndege. Kwa mfano:
- Ongeza moduli ya mtiririko wa macho kwa nafasi ya ndani na kuelea.
- Ongeza rada ya leza kwa kuepusha vizuizi.
- Tumia telemetry kuwezesha upangaji wa safari za ndege na njia zinazojiendesha.
- Sakinisha kompyuta iliyo kwenye ubao (kwa mfano, Raspberry Pi) na utumie Dronekit-Python au ROS kupanga kudhibiti drone.
Lengo la kuongeza kompyuta kwenye ubao ni kushughulikia kazi ngumu zaidi, kama vile:
- Kutumia kamera ya Raspberry Pi kwa utambuzi wa kuona (inahitaji OpenCV, YOLO, nk.).
- Kuchanganya itifaki za mawasiliano ili kudhibiti safari ya ndege isiyo na rubani.
- Inatuma data ya ndege au video za ubora wa juu kupitia mitandao.
Vipengele hivi haviwezi kupatikana kwa kutegemea kidhibiti cha ndege pekee.
Kusoma upanuzi wa nje huzingatia hasa maombi, ambayo pia ni mwelekeo wa mashindano mengi nchini kote.Baada ya kujifunza, unaweza kuchunguza maeneo muhimu ya drones zenye akili, kama vile utambuzi wa kuona, ushirikiano wa AI na drones, na zaidi.
2. Je, ni sharti gani za maendeleo ya kujitegemea?
Kujifunza kuhusu drones ni mchakato wa polepole. Mifumo isiyo na rubani ni ya kitabia na shirikishi, ikihusisha anuwai ya maeneo ya maarifa. Ili kujifunza maendeleo ya drone, misingi ifuatayo inahitajika:
- Ujuzi wa msingi wa mikono, ikiwa ni pamoja na ustadi wa kutumia chuma cha soldering, screwdrivers mbalimbali, na zana nyingine.
- Ujuzi wa kimsingi wa vifaa vya elektroniki: dhana kama vile voltage, mkondo, nguvu, polarity na ishara.
- Ujuzi wa kimsingi wa udhibiti wa otomatiki: Udhibiti wa PID, maoni, ishara za dijiti, ishara za analogi, n.k.
- Ujuzi wa msingi wa kompyuta: madereva, bandari za serial, viwango vya baud, matoleo ya firmware, matoleo ya programu.
- Ujuzi wa kimsingi wa drones za Pixhawk.
- Ujuzi wa kimsingi wa mfumo wa uendeshaji wa Ubuntu.
- Ustadi wa lugha ya programu: kama vile C++ na Python.
Jinsi ya kutengeneza Drone ya Respberry PI?
Related Collections