ST-3046-C001 ni 6V 40kg 40kg serial bus smart servo,kupitisha kipochi kamili cha aloi ya alumini,mori isiyo na msingi, gearbox ya chuma,mota isiyo na msingi, Feetech imejitafutia utafiti na kutengeneza bodi ya kidhibiti ya TTL,12 kitambuzi cha usimbaji cha usahihi wa hali ya juu kidogo. Torque ya duka ni 40kg.cm, inaweza kuweka maoni, kasi, voltage, sasa, joto, vigezo vya upakiaji, hivyo, ulinzi wa ziada na wa sasa unaweza kupatikana. Inafaa kwa matumizi katika vifaa vya viwandani, roboti na hali ya utumaji wa utumaji.
SKU:STS3046
Jina la Bidhaa:7.4V 40KG.CM Plastic Case Metal Magnetic Encoder Shaft Moja ya TTL Serial Bus Servo
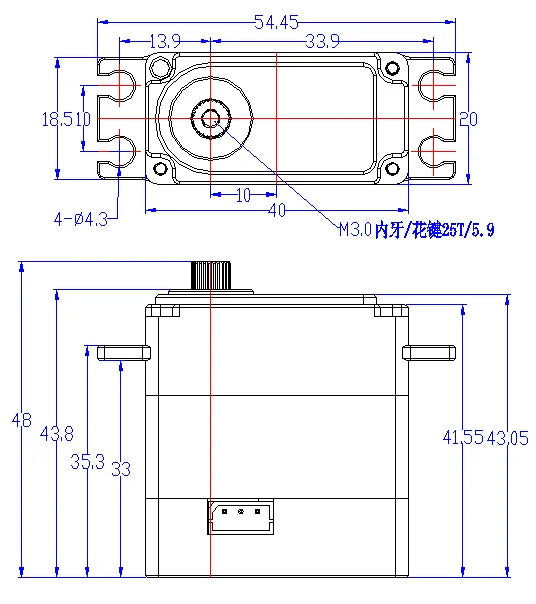
Ukubwa wa kuonekana:45.2X24.7X35mm& Torque ya duka:[email protected]
Kasi ya duka:[email protected]
Maoni: mzigo / nafasi / kasi / voltage / sasa / joto
Ulinzi wa kielektroniki: overheat / overcurrent / overvoltage / overload ulinzi




Sifa za Muundo:
Ganda huchukua ganda la plastiki la uhandisi na nguvu ya juu,Boresha umbali wa katikati,Muundo thabiti zaidi wa jumla, Gia ya servo inachukua mchanganyiko wa Gia ya shaba 1:345, torque ya juu zaidi; Katika Torque sawa ,linganisha na saizi ya kawaida ya servo, inaonekana wasifu wa chini(5mm),Mwili hupitisha muundo wa muundo wa mhimili mbili,Sifa za kimuundo za mduara uliowekwa laini,Njia ya waya ya nyaya mbili zinazotoka na chuma naibu Mkuu wa pembe za servo,Inafaa kwa utumiaji katika roboti yenye miiko minne, roboti ya nyoka, roboti ya eneo-kazi, roboti ya kibinadamu na mkono wa kimakenika.
Jukumu la Udhibiti wa kielektroniki:
1.Kitendakazi cha kusimamisha kasi ya kuanza: kasi na thamani ya kuongeza kasi inaweza kuwekwa, athari ya mwendo ni ya upole zaidi.
2.Usahihi wa hali ya juu, msimamo kamili wa digrii 360 4096 kidogo, azimio la juu zaidi ni digrii 0.088, ikiwa udhibiti ni digrii 90, ingiza 4096 / 360 * 90 = 1024, ikiwa udhibiti ni digrii 180, ingiza 4096 / 360 * 1480 = 200 = 2. , ili kukokotoa.
3.Kuna mabadiliko manne ya hali ya kufanya kazi (modi 0 nafasi servo, mode 1 kasi ya kitanzi kufungwa, mode 2 kasi ya kitanzi wazi, mode 3 hatua servo).
1), Modi 0:Modi ya Mahali, hali chaguo-msingi. Katika hali hii, udhibiti kamili wa pembe ya digrii 360 unaweza kutekelezwa. Inaauni harakati ya kuongeza kasi.
2), Hali ya 1:Kitanzi kilichofungwa kwa kasi, katika kiolesura cha programu, modi ya uendeshaji imewekwa kuwa 1, badilisha hadi modi ya kitanzi cha kasi, na uweke kasi inayolingana katika safu wima ya kasi ili kukimbia. .
3)、Njia ya 2:Ongeza kitanzi cha kasi, katika kiolesura cha programu, hali ya uendeshaji imewekwa kuwa 2, badilisha hadi modi ya ufunguaji wa kasi, na uweke saa inayolingana katika safu wima ya saa ili kuendesha.
4) 、 Mode3: Hali ya hatua: katika kiolesura cha programu, upeo wa juu / wa chini kabisa wa pembe umewekwa hadi 0, na hali ya uendeshaji imewekwa 3. Badili hadi modi ya hatua. Ingiza nafasi katika upau wa nafasi ili kupiga hatua kuelekea nafasi inayolengwa. Bofya nafasi tena ili kuendelea kupiga hatua katika mwelekeo ule ule.
4、Hali ya kugeuka nyingi, udhibiti kamili na maoni ya digrii 360, chini ya usahihi wa juu kabisa, udhibiti kamili wa nafasi unaweza kuwa plus au minus 7, lakini idadi ya mizunguko ya nishati haijahifadhiwa, ni thamani kamili ya maoni ya nafasi pekee ndiyo inayobaki.
5、Urekebishaji wa ufunguo mmoja, usakinishaji wa pembe ya digrii 360 katika nafasi yoyote, (40 (desimali) ingizo la anwani 128 (desimali)) moja ya ufunguo wa kusahihisha nafasi ya sasa ni ya kati (2048 (desimali)).
6、 kiwango cha mawasiliano cha TTL, mawasiliano yasiyolingana ya nusu duplex, usaidizi wa itifaki ya basi ili kurekebisha vigezo vya kusoma na kuandika, na kuongeza utendakazi wa kusoma landanishi (tuma maagizo ya kupokea maagizo yaliyosomwa kutoka kwa kila servo kwenye basi kwa zamu.)
7、Kinga nyingi, (upakiaji kupita kiasi, kupita kiasi, kuongezeka kwa joto, joto kupita kiasi, mpangilio wa swichi, kubadilisha vigezo vya hali)
1) 、 Ulinzi wa upakiaji: kupitia ugunduzi wa msimamo, wakati wa harakati kutoka kwa nafasi ya kuanzia hadi kwa nafasi inayolengwa, wakati nafasi ya sasa inagunduliwa kuwa sio nafasi inayolengwa baada ya kukutana na kizuizi cha vizuizi, nguvu ya upakuaji hudumu kwa 2S (20% ya nguvu ya kuzuia chaguo-msingi). Hadi amri mpya ianzishwe, Ulinzi wa kutolewa
2)、 Ulinzi wa sasa hivi: kupitia thamani ya sasa iliyowekwa, angalia ikiwa ya sasa inafikia thamani ya sasa iliyowekwa. Inapofikia thamani ya sasa iliyowekwa, toa nguvu (torque chaguo-msingi ni 0). Hadi amri mpya iwashwe, Ulinzi wa Kutolewa
3) 、 Ulinzi wa juu ya voltage: tambua thamani ya sasa ya voltage. Ikizidi thamani ya voltage iliyowekwa, kengele itaonyesha voltage inayozidi.
4)、Kinga ya joto kupita kiasi: tambua halijoto ya sasa ya gari. Ikiwa halijoto itazidi thamani iliyowekwa, kengele itaonyesha joto kupita kiasi.
8:Maoni mengi:
1)Pakia maoni: pato la udhibiti wa sasa huendesha mzunguko wa ushuru wa voltage wa injini, na kipimo kamili ni 1000 = 100%. 4)Maoni kuhusu halijoto: halijoto ya ndani ya kufanya kazi ya servo ya sasa(joto la kupimia)。
5)Maoni ya kasi: jibu kasi ya mzunguko wa sasa wa gari, na idadi ya hatua katika muda wa kitengo (kwa sekunde)

Huduma Zetu: Tunatoa Suluhisho Zilizobinafsishwa za Njia Moja kwa Utengenezaji Asili wa Usanifu (ODM) na Utengenezaji wa Vifaa Halisi (OEM). Uwezo wetu ni pamoja na muundo wa kielektroniki, muundo wa muundo, na utengenezaji.Zaidi ya hayo, tunatoa huduma za ubinafsishaji kwa bidhaa kama vile servos zilizo na vipengele kama vile PWM, RS485, 3V-24v uendeshaji, na udhibiti wa gurudumu la maoni 0-360°.
Imeboreshwa katika ODM na OEM na Imeundwa Maalum 1.Nembo Yako inalebo au imechapishwa
2.Servo Wire
3.Packing:PE Bag,Colur Box,plastic box wity
Nembo yako
4.Kiunganishi cha kebo
5.Imebinafsishwa Seva mbalimbali za voltage zinazofanya kazi
9、Fungua vigezo vya PID.
Bidhaa zetu zimepita vyeti vya CE na ROHS, na wengi wao wametuma maombi ya hataza za mwonekano na hataza za muundo wa matumizi
Bidhaa zetu zimepata uthibitisho kutoka kwa 'CE', 'RoHS' na 'REACH'. Zaidi ya hayo, tunashikilia hataza za mwonekano na hataza za muundo wa miundo yetu.