







Feetech STS3215 - 7.4V 20KG 360° 25T Kisimbaji cha Magnetic Basis Serial Servo Multi turn servo Usahihi wa hali ya juu servo ya hali ya hatua.
Feetech STS3215 - 7.4V 20KG 360° 25T Kisimbaji cha Magnetic Basis Serial Servo Multi turn servo Usahihi wa hali ya juu servo ya hali ya hatua.
Feetech
Couldn't load pickup availability
Feetech STS3215 - 7.4V 20KG 360° MAELEZO ya Servo
Jina la Biashara: Feetech
Asili: Uchina Bara
Nyenzo: Plastiki
Aina ya Plastiki: PC
Sehemu za RC & Accs: Betri - LiPo
Ukubwa: 10*10*10
Kwa Aina ya Gari: Magari
Tumia: Vichezeo vya Magari na Udhibiti wa Mbali
Boresha Sehemu/Vifaa: Betri ya Lithium
Vidhibiti/Vifaa vya Udhibiti wa Mbali: Kidhibiti cha Mbali
Ugavi wa Zana: Betri
Wingi: pcs 1
Vigezo vya kiufundi: KV1100
Nambari ya Mfano: STS3215
Sifa za Hifadhi ya Magurudumu manne: Motor
Magurudumu: Screw
Nambari ya Mfano: STS3215
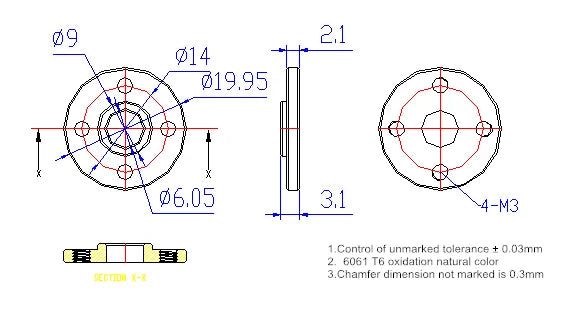
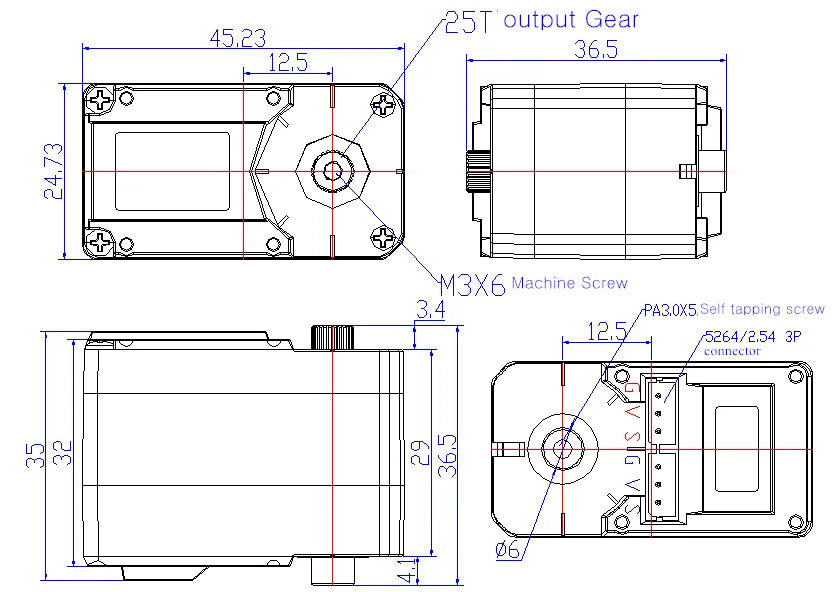
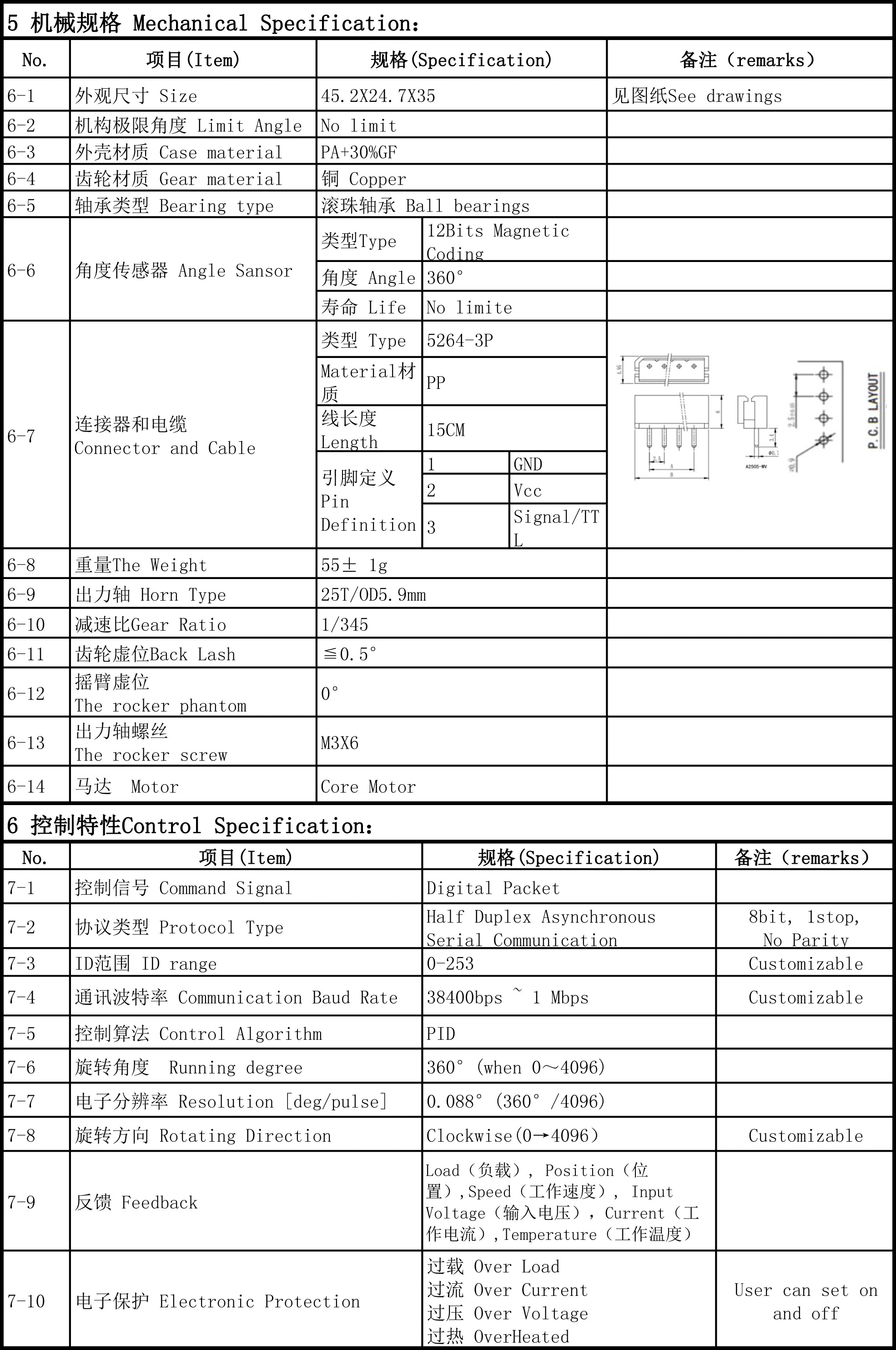
Ukubwa: 45.2 x 24.7 X 35mm
Uzito: 55± 1g
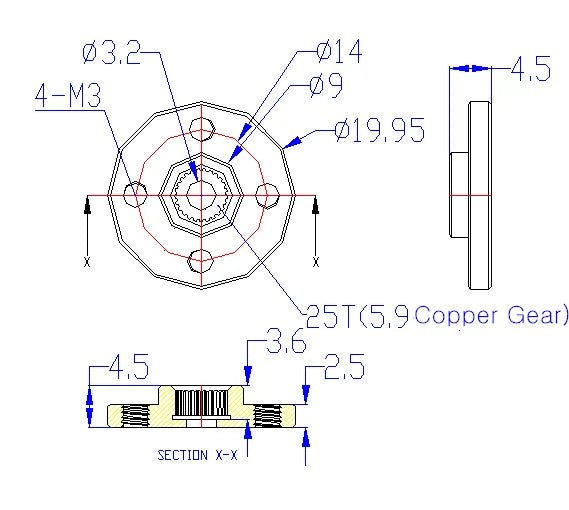
Aina ya gia: Shaba
Pembe ya kikomo: HAKUNA kikomo
Kuzaa: Bei za mpira
Msururu wa gia ya pembe: 25T
Motor: Motor isiyo na msingi
Aina ya Voltage ya Uendeshaji: 6-7.4V
Torati ya kilele cha duka: 19.5kg.cm@6V
Torque iliyokadiriwa: 6.5kg.cm@6V
Aina ya Itifaki: Half Duplex Asynchronous Serial Communication
|
Jina la Bidhaa
|
Bidhaa mpya ya Feetech 2020 STS3215Magnetic Encoder 360°Tathmini ya Servo ya basi la mfululizo
|
|
Ukubwa
|
45.2X24.7X35mm
|
|
Uzito
|
55± 1g
|
|
Torque ya Kusimamisha
|
|
|
Kasi ya Kusimama
|
|
|
Maoni
|
mzigo / nafasi / kasi / voltage / sasa / joto
|
|
Ulinzi wa kielektroniki
|
joto kupita kiasi / overcurrent / overvoltage / overload ulinzi
|
|
maalum katika ODM na OEM
|
Y
|
|
Jaribio la maisha
|
>100000
|
|
Kelele za injini
|
45±5dB
|
|
Kelele za gia za uendeshaji
|
60±5dB
|
|
Utendaji wa kuzuia maji
|
Hapana
|
|
Aina ya Itifaki
|
Half Duplex Asynchronous Serial Communication
|
-
Sifa za Muundo:
-
Ganda huchukua ganda la plastiki la uhandisi na nguvu ya juu,Boresha umbali wa katikati,Muundo thabiti zaidi wa jumla, Gia ya servo inachukua mchanganyiko wa Gia ya shaba 1:345, torque ya juu zaidi;Katika Torque sawa, linganisha na servo ya kawaida saizi, inaonekana wasifu wa chini (5mm),Mwili unachukua muundo wa muundo wa mhimili mara mbili,Sifa za kimuundo za duara zilizowekwa laini,Njia ya waya ya nyaya mbili zinazotoka na chuma naibu mkuu wa pembe za servo,Inafaa kutumika katika roboti yenye miiko minne, nyoka. roboti, roboti ya mezani, roboti ya kibinadamu na mkono wa mitambo.

2.Servo Wire
3.Ufungashaji: Mfuko wa PE, Sanduku la Rangi, sanduku la plastiki lenye
Nembo yako
4.Kiunganishi cha kebo
5.Imeboreshwa Mbalimbali ya servo pana ya kufanya kazi ya voltage
1.Kazi ya kusimamisha kasi ya kuanza: kasi na thamani ya kuongeza kasi inaweza kuwekwa, athari ya mwendo ni mpole zaidi.
2.Usahihi wa hali ya juu, nafasi ya digrii 360 kabisa usahihi wa biti 4096, azimio la juu zaidi la msimamo ni 0.digrii 088, ikiwa udhibiti ni digrii 90, ingiza 4096 / 360 * 90 = 1024, ikiwa udhibiti ni digrii 180, ingiza 4096 / 360 * 180 = 2048, ili kuhesabu.
3.Kuna nne za kufanya kazi mode byte (mode 0 nafasi servo, mode 1 kasi kufungwa-kitanzi, mode 2 kasi ya wazi-kitanzi, mode 3 hatua servo).
1)、Modi 0:Modi ya eneo, hali chaguo-msingi. Katika hali hii, udhibiti kamili wa pembe ya digrii 360 unaweza kutekelezwa. Kusaidia harakati za kuongeza kasi.
2) 、Njia ya 1:Kitanzi kilichofungwa kwa kasi, katika kiolesura cha programu, hali ya uendeshaji imewekwa kuwa 1, badilisha hadi modi ya kitanzi-cha kasi, na uweke kasi inayolingana katika safu wima ya kasi ili kukimbia.
3)、Njia ya 2:Kitanzi-wazi cha kasi, katika kiolesura cha programu, modi ya uendeshaji imewekwa kuwa 2, badilisha hadi modi ya kufungua-kitanzi kwa kasi, na uweke saa inayolingana katika safu wima ya saa ili kukimbia.
4), Mode3:Hatua ya modi: katika kiolesura cha programu, upeo wa juu/wa chini kabisa wa pembe umewekwa kuwa 0, na hali ya uendeshaji imewekwa kuwa 3. Badili hadi modi ya hatua. Ingiza nafasi katika upau wa nafasi ili kupiga hatua kuelekea nafasi inayolengwa. Bofya nafasi tena ili kuendelea kupiga hatua katika mwelekeo sawa.
4、Hali ya zamu nyingi, udhibiti kamili na maoni ya digrii 360, chini ya usahihi wa juu kabisa, udhibiti kamili wa nafasi unaweza kuwa zamu zaidi au kutoa 7, lakini idadi ya mizunguko ya nishati haijahifadhiwa, nafasi kamili pekee. thamani ya maoni imehifadhiwa.
5、Urekebishaji wa ufunguo mmoja, usakinishaji wa pembe ya digrii 360 katika nafasi yoyote, (40 (desimali) ingizo la anwani 128 (desimali)) urekebishaji wa ufunguo mmoja nafasi ya sasa ni katikati (2048 (desimali)).
6、 kiwango cha mawasiliano cha TTL, mawasiliano nusu duplex asynchronous, usaidizi wa itifaki ya basi ili kurekebisha vigezo vya kusoma na kuandika, na kuongeza utendakazi wa kusoma kisawazishaji (tuma maagizo ili kupokea maagizo ya kusoma kutoka kwa kila servo kwenye basi kwa zamu. .)
7、Kinga nyingi, (kupakia kupita kiasi, kupita kiasi, kuongezeka kwa joto, joto kupita kiasi, mpangilio wa swichi, kubadilisha kigezo cha hali)
1)、 Ulinzi wa upakiaji kupita kiasi: kupitia utambuzi wa nafasi, wakati wa harakati kutoka kwa kuanza nafasi kwa nafasi ya lengo, wakati nafasi ya sasa imegunduliwa kuwa sio nafasi ya lengo baada ya kukutana na kuzuia vikwazo, nguvu ya upakuaji hudumu kwa 2S (20% ya nguvu ya kuzuia default). Hadi amri mpya ianzishwe, Ulinzi wa kutolewa
2)、Ulinzi wa sasa hivi: kupitia thamani ya sasa iliyowekwa, angalia ikiwa ya sasa inafikia thamani ya sasa iliyowekwa. Inapofikia thamani ya sasa iliyowekwa, toa nguvu (torque chaguo-msingi ni 0). Hadi amri mpya iwashwe, Ulinzi wa Kutolewa
3) 、 Ulinzi wa juu ya voltage: tambua thamani ya sasa ya voltage. Ikiwa itazidi thamani ya voltage iliyowekwa, kengele itaonyesha voltage ya juu.
4), Kinga ya joto kupita kiasi: tambua halijoto ya sasa ya gari. Ikiwa halijoto inazidi thamani iliyowekwa, kengele itaonyesha joto kupita kiasi.
8:Maoni mengi:
1)Pakia maoni: pato la udhibiti wa sasa huendesha mzunguko wa ushuru wa voltage wa mota, na kipimo kamili ni 1000 = 100% pato la toko.
2)Maoni ya sasa: Seva inayofanya kazi ya sasa, 1 = 6.5mA
3)Maoni ya voltage: Voltage ya servo inayofanya kazi,70=7V,0.1V
4)Maoni ya halijoto: halijoto ya ndani ya kufanya kazi ya servo ya sasa(joto la kupimia).
5)Maoni ya kasi: jibu kasi ya mzunguko wa sasa wa motor, na idadi ya hatua katika muda wa kitengo (kwa sekunde)
9、Fungua vigezo vya PID.





Related Collections







