

Gari la HIGH TORQUE HTDW-5047-36-NE-JC, Kipunguza 36:1, Nguvu ya Torque 4Nm, Encoder ya 14-bit, 12-48V
Gari la HIGH TORQUE HTDW-5047-36-NE-JC, Kipunguza 36:1, Nguvu ya Torque 4Nm, Encoder ya 14-bit, 12-48V
HIGH TORQUE
Regular price
$308.80 USD
Regular price
Sale price
$308.80 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
Motor ya HIGH TORQUE HTDW-5047-36-NE-JC ni moduli ya motor yenye gia ndogo (Toleo la Roller Iliyovuka) iliyoundwa kwa ajili ya kudhibiti mwendo sahihi wa kasi ya chini na torque ya juu katika roboti na mifumo ya automatisering.
Matumizi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons
- Roboti za mguu minne
- Magari ya AGV
- Roboti za ARU
Vipengele Muhimu
- Utambulisho wa mfano unaoonyeshwa: HTDW-5047-36-JC / HTDW-5047-36-NE-JC
- Uwiano wa kupunguza: 36
- Parameta za nyuma ya chini na usahihi wa kuweka zimetolewa kwa ajili ya uunganisho wa reducer/moduli
- Ufafanuzi wa encoder wa ingizo wa bit 14 na ufafanuzi wa encoder wa pato wa bit 14
- Wakati wa majibu ya haraka: ≤200us
- Masafa ya udhibiti: 3kHz
Kwa msaada wa mauzo ya awali na uunganisho, wasiliana na https://rcdrone.top/ au barua pepe [email protected].
Maelezo
| Urefu na Upana | 60mm |
| Kimo | 52.4mm |
| Uzito | 374g |
| Kurudi nyuma | <10Arcmin |
| Usahihi wa Kurudiwa kwa Nafasi | <12Arcmin |
| Usahihi wa Nafasi ya Kima cha Juu | <15Arcmin |
| Ushikaji wa Torque | 0.062Nm/A |
| Idadi ya Jozi za Nguzo | 14 |
| Uwiano wa Kupunguza | 36 |
| Torque ya Locked-rotor | 21Nm |
| RPM Bila Load | 60RPM |
| Torque Iliyoainishwa | 4Nm |
| RPM Iliyoainishwa | 40RPM |
| Rating | 17W |
| Kiwango cha Voltage | 12-48V |
| Current ya Peak | 10A |
| Usahihi wa Udhibiti wa Kasi | ±15% |
| Ufafanuzi wa Input Encoder | 14-bit |
| Baud Rate | 5Mbps |
| Current Iliyoainishwa | 2A |
| Usahihi wa Udhibiti | ±15% |
| Wakati wa Majibu | ≤200us |
| Output Encoder Resolution | 14-bit |
| Control Frequency | 3kHz |
Maelekezo & Nyaraka
- Jitihada ya Motor ya HIGH TORQUE Msaada wa Mtumiaji wa Mwongozo (PDF)
- Mwongozo wa Jitihada (PDF)
- 1.2 fdcan Uchambuzi wa Protokali (PDF)
- Kitabu cha Mtumiaji (PDF)
- Motor ya HIGH TORQUE HTDW-5047-36-NE-JC Mfano wa 3D (STP, ZIP)
Maelezo

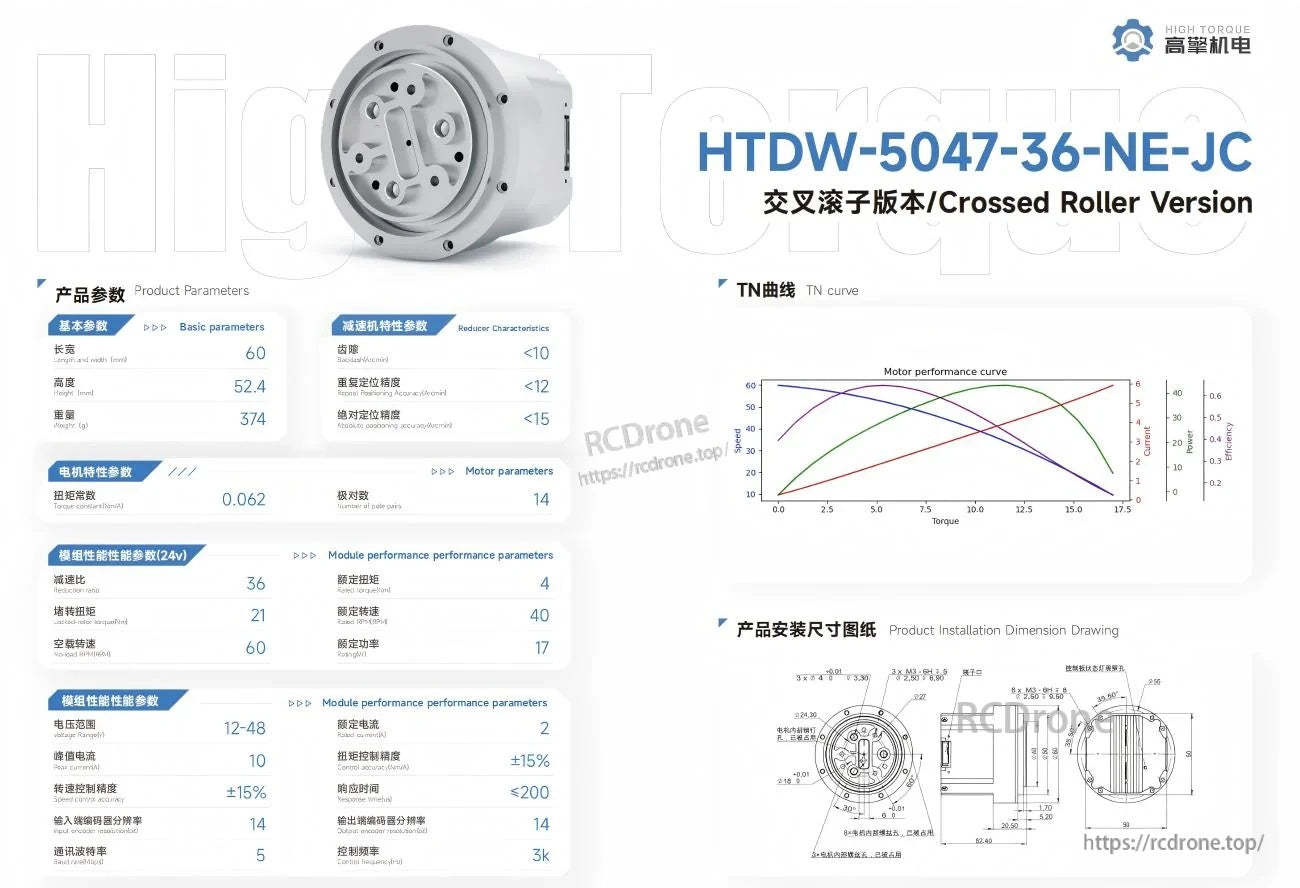
Muonekano wa moduli ya kupunguza roller iliyovuka yenye vigezo muhimu, mikondo ya utendaji wa motor, na mchoro wa vipimo vya usakinishaji kwa mpango wa uunganisho.

