


MODULI YA MOTOR YA NGUVU KUBWA HTDW-5047 50mm 12-48V Encoder ya 14-bit Uwiano wa 9/20/36
MODULI YA MOTOR YA NGUVU KUBWA HTDW-5047 50mm 12-48V Encoder ya 14-bit Uwiano wa 9/20/36
HIGH TORQUE
Couldn't load pickup availability
Muhtasari
Motoru ya HIGH TORQUE HTDW-5047 ni moduli ndogo za motoru zenye nguvu kubwa zinazotolewa kwa uwiano tatu wa kupunguza (9 / 20 / 36). Inajumuisha azimio la encoder la ingizo/kuondoa la bit 14, anuwai ya voltage ya 12-48V, na frequency ya udhibiti ya 3kHz kwa udhibiti wa mwendo na viungo vya roboti.
Vipengele Muhimu
- Modeli: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Backlash ya chini: <10 Arcmin
- Usahihi wa kurudiwa kwa nafasi: <12 Arcmin; usahihi wa nafasi wa moja kwa moja: <15 Arcmin
- Azimio la encoder: 14-bit (ingizo) na 14-bit (toleo)
- Kiwango cha baud: 5 Mbps; muda wa majibu: ≤200 us
Maelezo ya Kiufundi
| Parameta | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Urefu na upana | 50mm | 50mm | 50mm |
| Kimo | 47.4mm | 47.4mm | 47mm |
| Uzito | 300g | 322g | 321g |
| Backlash | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Usahihi wa kurudiwa kwa nafasi | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Usahihi wa nafasi ya jumla | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Constant ya torque | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Idadi ya jozi za nguzo | 14 | 14 | 14 |
| Uwiano wa kupunguza | 9 | 20 | 36 |
| Torque ya locked-rotor | 6 Nm | 12 Nm | 21 Nm |
| RPM bila mzigo | 260 RPM | 130 RPM | 60 RPM |
| Torque iliyokadiriwa | 1 Nm | 2 Nm | 4 Nm |
| RPM iliyokadiriwa | 170 RPM | 110 RPM | 40 RPM |
| Rating | 18 W | 23 W | 17 W |
| Kiwango cha voltage | 12-48V | 12-48V | 12-48V |
| Peak current | 10 A | 10 A | 10 A |
| Usahihi wa udhibiti wa kasi | ±8% | ±15% | ±15% |
| Ingiza azimio la encoder | 14-bit | 14-bit | 14-bit |
| Kiwango cha baud | 5 Mbps | 5 Mbps | 5 Mbps |
| Upeo wa sasa | 2 A | 2 A | 2 A |
| Usahihi wa udhibiti | ±10% | ±15% | ±15% |
| Wakati wa majibu | ≤200 us | ≤200 us | ≤200 us |
| Tofauti ya azimio la encoder | 14-bit | 14-bit | 14-bit |
| Masafa ya udhibiti | 3 kHz | 3 kHz | 3 kHz |
Kwa mwongozo wa uchaguzi na msaada baada ya mauzo, wasiliana [email protected] or tembelea https://rcdrone.top/.
Maombi
- Roboti za kibinadamu
- Michemu ya roboti
- Exoskeletons
- Roboti wa mguu nne
- Magari ya AGV
- Roboti za ARU
Maelekezo
- HTDW-5047-9-NE MOTOR YA JUU YA TORQUE Msaada wa Ujumbe wa Mtumiaji (PDF)
- HTDW-5047-20-NE MOTOR YA JUU YA TORQUE Msaada wa Ujumbe wa Mtumiaji (PDF)
- HTDW-5047-36-NE MOTOR YA JUU YA TORQUE Msaada wa Ujumbe wa Mtumiaji (PDF)
- HTDW-5047-9-NE Mwongozo wa Ujumbe (PDF)
- HTDW-5047-20-NE Mwongozo wa Ujumbe (PDF)
- HTDW-5047-36-NE Mwongozo wa Ujumbe (PDF)
- HTDW-5047-9-NE 1.2 uchambuzi wa itifaki ya fdcan (PDF)
- HTDW-5047-20-NE 1.2 uchambuzi wa itifaki ya fdcan (PDF)
- HTDW-5047-36-NE 1.2 fdcan Uchambuzi wa Protokali (PDF)
- HTDW-5047-9-NE Motor Mfano wa 3D (STP, ZIP)
- HTDW-5047-20-NE Motor Mfano wa 3D (STP, ZIP)
- HTDW-5047-36-NE Motor Mfano wa 3D (STP, ZIP)
- HTDW-5047 Mwongozo wa Mtumiaji (PDF)
Maelezo

Mfululizo wa HTDW-5047 unachanganya muundo wa kompakt wa 50mm na torque ya juu kwa viungo vya roboti na udhibiti wa mwendo.
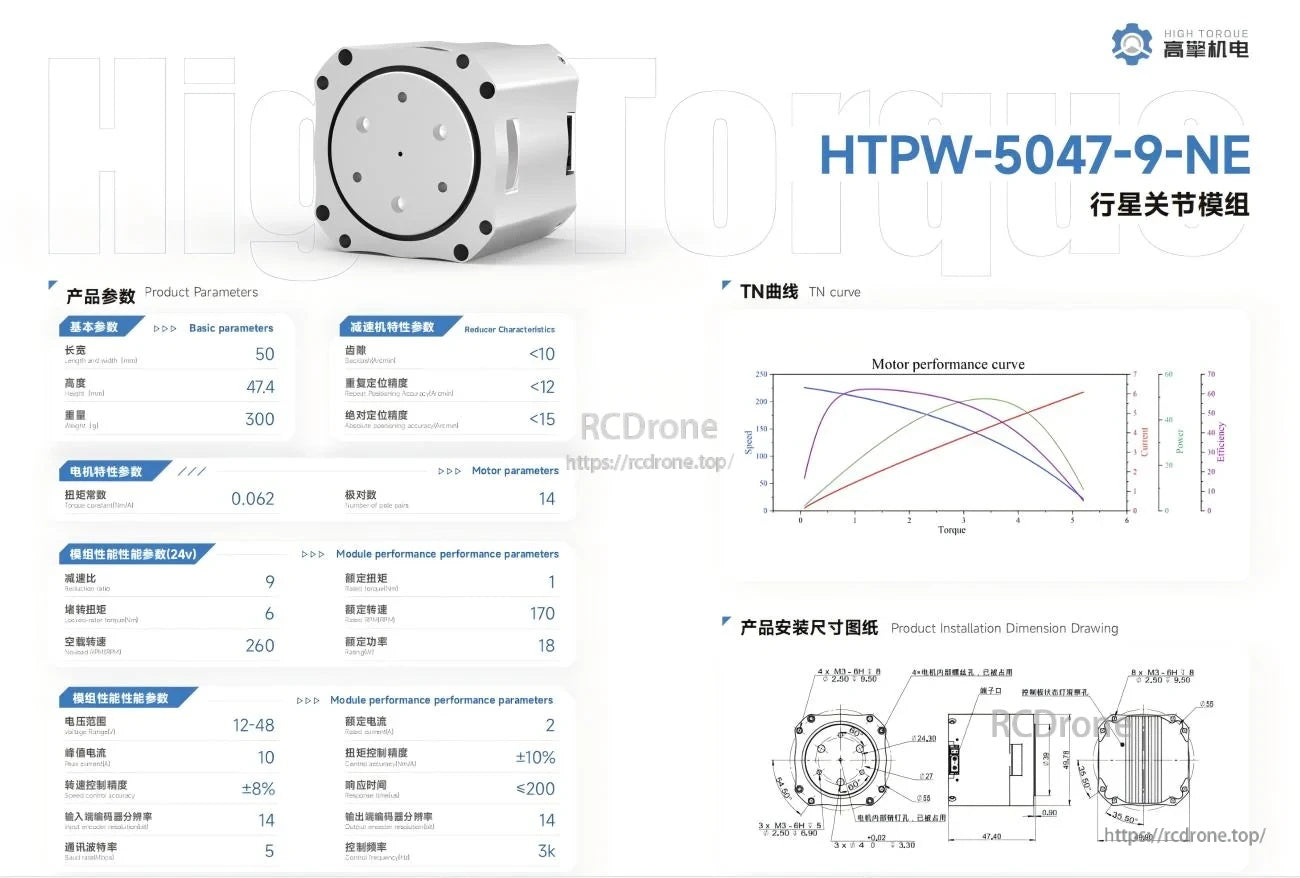
Chagua toleo la kupunguza 9:1 wakati kasi ya juu inapopewa kipaumbele huku ukihifadhi alama sawa ya moduli.
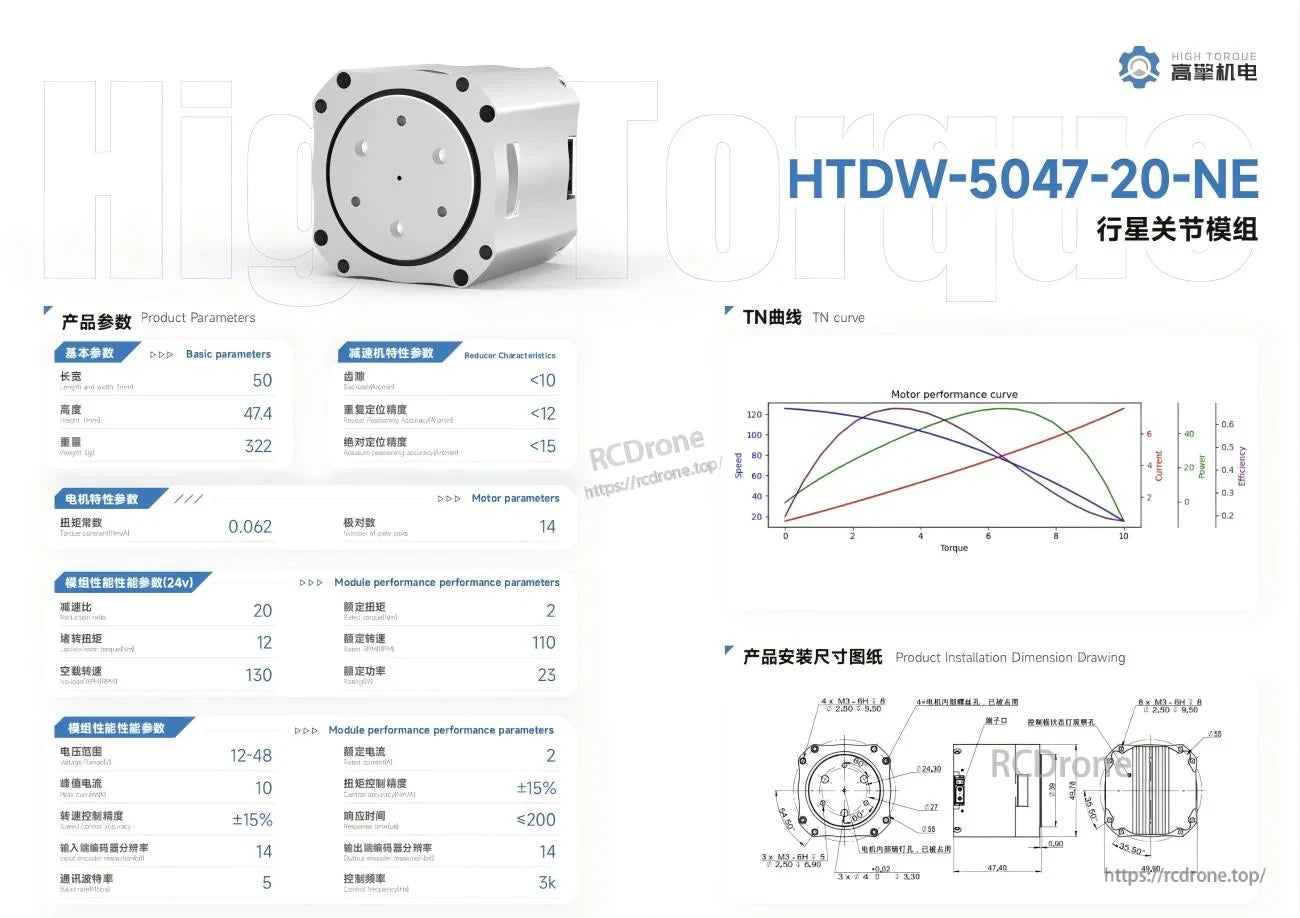
Chaguo la kupunguza 20:1 linatoa usawa kati ya kasi na torque kwa viungo vya roboti na actuators kwa matumizi ya jumla.
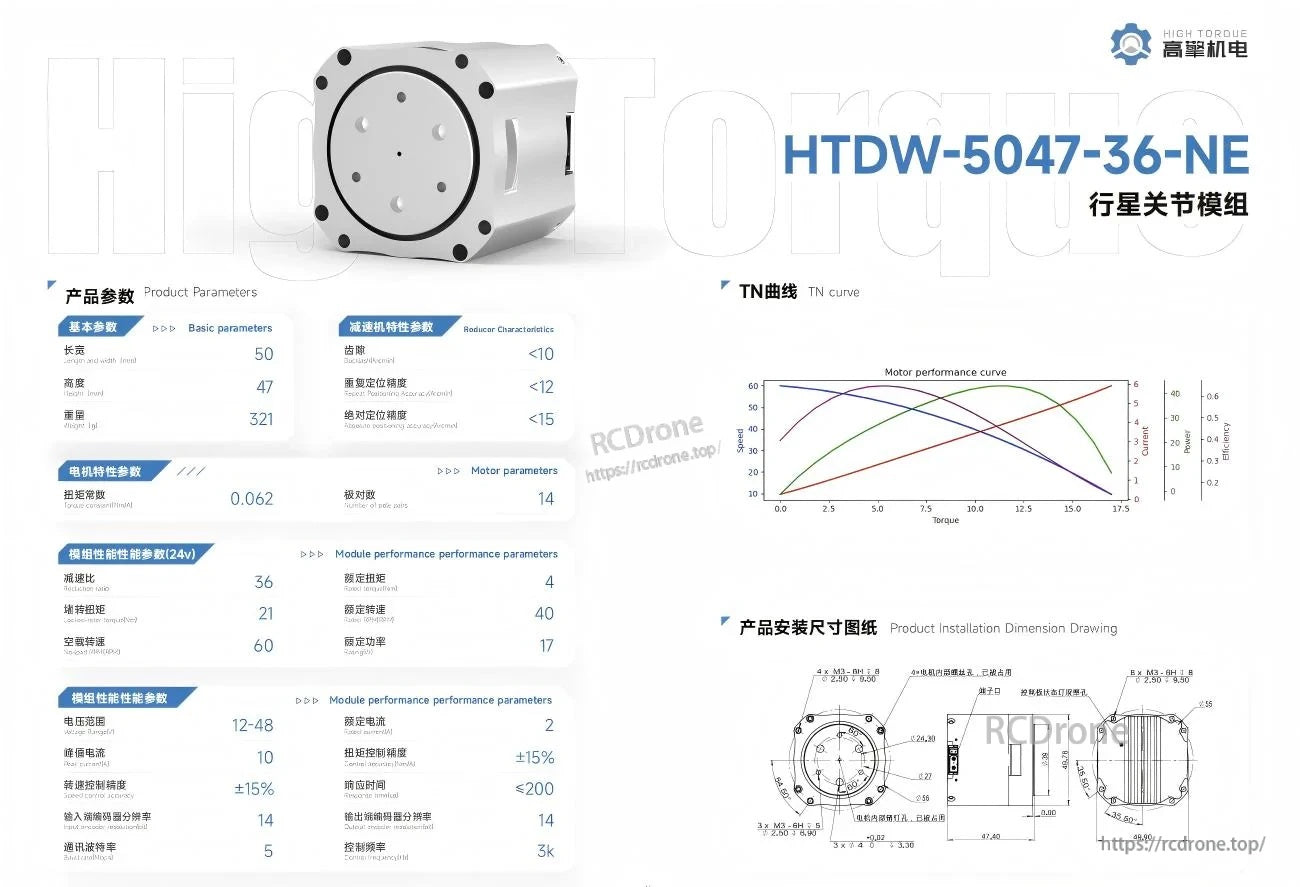
Toleo la kupunguza 36:1 linafaa kwa viungo vya kasi ya chini, torque ya juu ambapo kuweka nafasi kwa usahihi ni muhimu.


