

MOTORI YA NGUVU KUBWA HTDW-6056-36-NE-JC (Toleo la Roller Iliyovuka), Uwiano wa 36, 10Nm Iliyokadiriwa, 12-48V
MOTORI YA NGUVU KUBWA HTDW-6056-36-NE-JC (Toleo la Roller Iliyovuka), Uwiano wa 36, 10Nm Iliyokadiriwa, 12-48V
HIGH TORQUE
Regular price
$362.00 USD
Regular price
Sale price
$362.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
Motoru ya HIGH TORQUE HTDW-6056-36-NE-JC ni moduli ya motor yenye torque ya juu inayoonyesha uwiano wa kupunguza wa 36 na muundo wa roller iliyovuka. Imepangwa kwa uendeshaji wa 12-48V ikiwa na azimio la encoder la ingizo/kuondoa la bit 14 na imeundwa kwa ajili ya uendeshaji sahihi wa kasi ya chini, na torque ya juu.
Vipengele Muhimu
- Mfano: HTDW-6056-36-NE-JC (pia umeandikwa HTDW-6056-36-JC kwenye sanaa ya bidhaa)
- Toleo la Roller Lililovuka
- Backlash ya chini: <10Arcmin
- Azimio la Encoder: 14-bit (ingizo), 14-bit (toleo)
- Masafa ya udhibiti: 3kHz
- Wakati wa majibu ya haraka: ≤200us
Maelezo ya Kiufundi
| Urefu na Upana | 60mm |
| Kimo | 56mm |
| Uzito | 570g |
| Backlash | <10Arcmin |
| Usahihi wa Kurudiwa kwa Nafasi | <12Arcmin |
| Usahihi wa Nafasi Kamili | <15Arcmin |
| Constant ya Torque | / |
| Idadi ya Jozi za Mifupa | 14 |
| Uwiano wa Kupunguza | 36 |
| Torque ya Rotor Iliyofungwa | 36Nm |
| RPM Bila Mizigo | 60RPM |
| Torque Iliyothibitishwa | 10Nm |
| RPM Iliyothibitishwa | 50RPM |
| Rating | 52W |
| Kiwango cha Voltage | 12-48V |
| Current ya Peak | 10A |
| Usahihi wa Udhibiti wa Kasi | ±10% |
| Ufafanuzi wa Encoder wa Kuingiza | 14-bit |
| Baud Rate | 5Mbps |
| Current Iliyothibitishwa | 3A |
| Usahihi wa Udhibiti | ±20% |
| Wakati wa Majibu | ≤200us |
| Ufafanuzi wa Encoder wa Kutoka | 14-bit |
| Masafa ya Udhibiti | 3kHz |
Maombi
- Roboti za Binadamu
- Microsimu za Roboti
- Exoskeletons
- Roboti Wanne
- Magari ya AGV
- Roboti za ARU
Kwa msaada wa uunganisho na maswali ya kabla ya mauzo, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelekezo & Pakua
- Muongozo wa Mtumiaji wa Msaada wa Kurekebisha Motor ya HIGH TORQUE (PDF)
- Muongozo wa Kurekebisha (PDF)
- 1.2 uchambuzi wa Itifaki ya fdcan (PDF)
- Muongozo wa Mtumiaji (PDF)
- HTDW-6056-36-NE-JC Mfano wa 3D (STP katika ZIP)
Maelezo

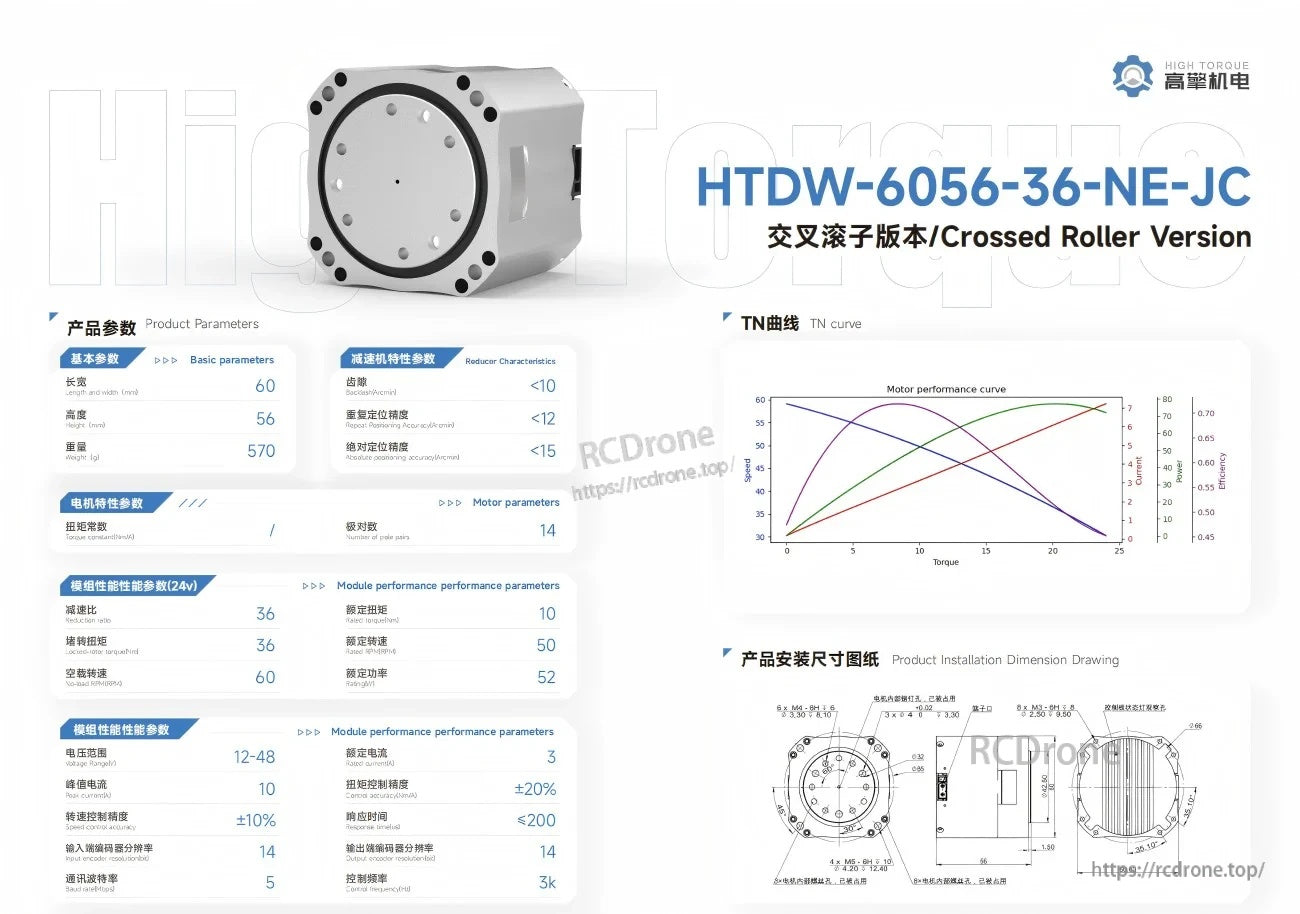
Vipimo vya kina na vipimo vya usakinishaji kwa toleo la roller iliyovuka husaidia kuthibitisha ufanisi na utendaji kabla ya kuunganishwa.

