

MOTORI YA NGUVU KUBWA HTDW-7256-35-NE, 15Nm Iliyokadiriwa / 60Nm Iliyofungwa, 12-48V, Vichunguzi vya 14-bit
MOTORI YA NGUVU KUBWA HTDW-7256-35-NE, 15Nm Iliyokadiriwa / 60Nm Iliyofungwa, 12-48V, Vichunguzi vya 14-bit
HIGH TORQUE
Couldn't load pickup availability
Muhtasari
MOTOR YA JUU YA TORQUE HTDW-7256-35-NE ni moduli ya motor yenye torque ya juu yenye uwiano wa kupunguza wa 35, iliyoundwa kwa ajili ya kudhibiti harakati za chini ya kasi na mzigo mzito kwa usahihi. Inajumuisha azimio la encoder la ingizo na toleo la bit 14, backlash ya chini (<10Arcmin), na inasaidia anuwai pana ya voltage ya 12-48V.
Maombi
- Roboti za kibinadamu
- Micano ya roboti
- Exoskeletons
- Roboti za mguu nne
- Magari ya AGV
- Roboti za ARU
Vipengele Muhimu
-
<Uwiano wa kupunguza: 35
- Backlash ya chini: <10Arcmin
- Usahihi wa kuweka: rudia <12Arcmin; kamili <15Arcmin
- Maoni ya encoder: uamuzi wa encoder wa ingizo 14-bit; uamuzi wa encoder wa pato 14-bit
- Utendaji wa kudhibiti: muda wa majibu ≤200us; mzunguko wa kudhibiti 3kHz; usahihi wa kudhibiti ±15%; usahihi wa kudhibiti kasi ±15%
- Vigezo vya kiunganishi vya umeme: kiwango cha baud 5Mbps
Maelezo ya Kiufundi
| Mfano | HTDW-7256-35-NE |
| Urefu na Upana | 75mm |
| Kimo | 56mm |
| Uzito | 850g | Backlash | <10Arcmin |
| Usahihi wa Kuweka Tena | <12Arcmin |
| Usahihi wa Kuweka Tena wa Kabisa | <15Arcmin |
| Constant ya Torque | 0.562Nm/A |
| Idadi ya Jozi za Nguzo | 14 |
| Uwiano wa Kupunguza | 35 |
| Torque ya Locked-rotor | 60Nm |
| RPM Bila Load | 60RPM |
| Torque Iliyopimwa | 15Nm |
| RPM Iliyopimwa | 50RPM |
| Rating | 79W |
| Kiwango cha Voltage | 12-48V |
| Peak Current | 45A |
| Usahihi wa Udhibiti wa Kasi | ±15% |
| Ufafanuzi wa Input Encoder | 14-bit |
| Baud Rate | 5Mbps |
| Current Iliyopimwa | 8A |
| Usahihi wa Udhibiti | ±15% |
| Wakati wa Majibu | ≤200us |
| Output Encoder Resolution | 14-bit |
| Frekvensi ya Udhibiti | 3kHz |
Kwa msaada wa mauzo ya awali na ushirikiano, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelekezo
- Chati ya Usanidi (PDF)
- Muongozo wa Mtumiaji wa Msaada wa Urekebishaji wa Motor ya Juu ya Torque (PDF)
- Muongozo wa Urekebishaji (PDF)
- 1.2 uchambuzi wa itifaki ya fdcan (PDF)
- Muongozo wa Mtumiaji (PDF)
- HTDW-7256-35-NE Mfano wa 3D (STEP)
Maelezo

Moduli ya motor yenye nguvu ya juu, ndogo, iliyojengwa kwa udhibiti sahihi wa mwendo wa kasi ya chini katika roboti na automatisering.
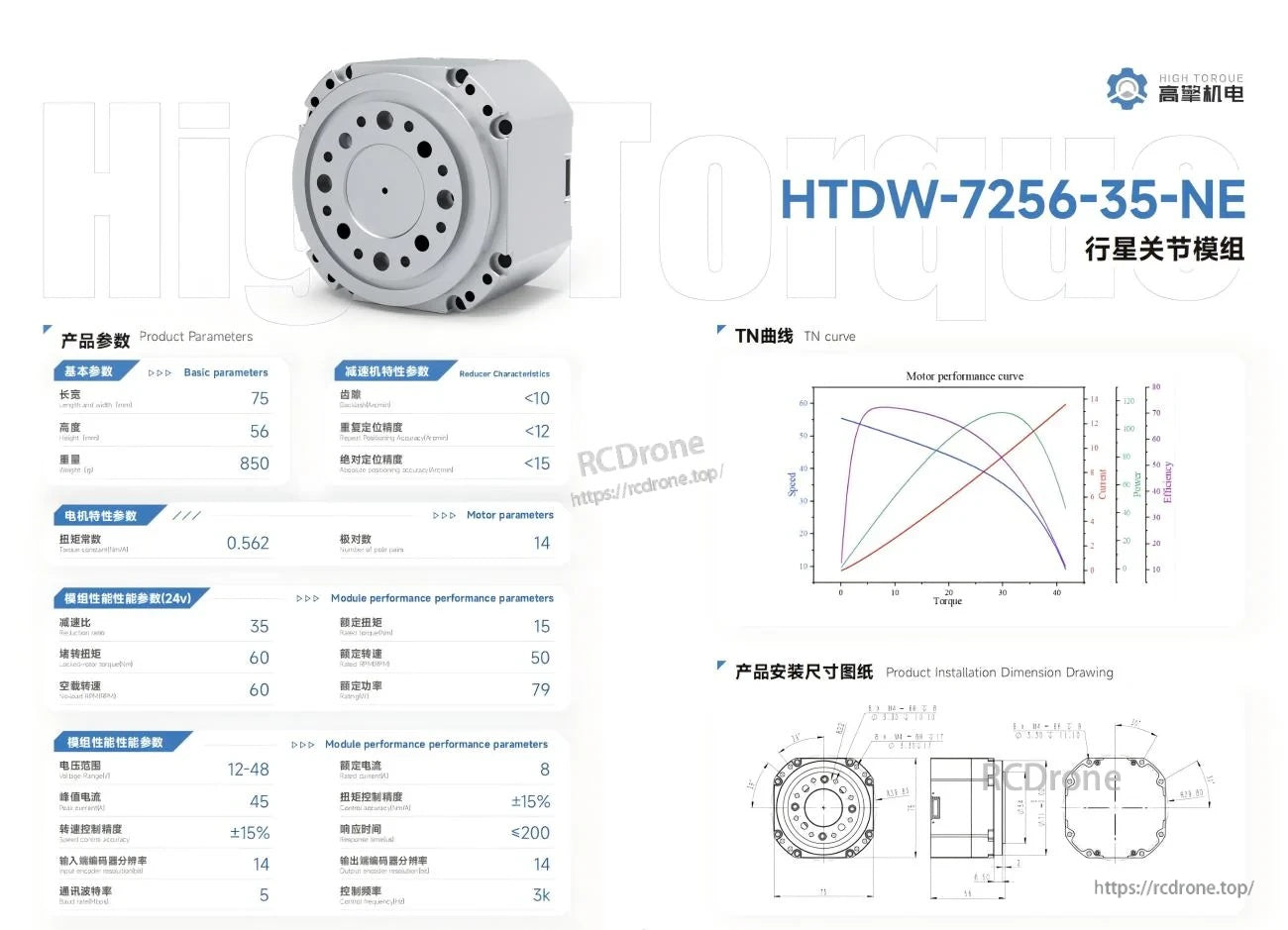
Vigezo muhimu vya utendaji, curve ya torque-kasi, na vipimo vya usakinishaji vinatolewa kwa ajili ya uunganisho na mpangilio wa mitambo.

