








Holybro H-RTK ZED-F9P Rover GNSS na RM3100 Compass & Antena ya Dual-Band – Moduli ya GPS ya RTK ya UAV (DroneCAN/UART)
Holybro H-RTK ZED-F9P Rover GNSS na RM3100 Compass & Antena ya Dual-Band – Moduli ya GPS ya RTK ya UAV (DroneCAN/UART)
HolyBro
Couldn't load pickup availability
Muhtasari
Holybro H-RTK ZED-F9P Rover ni moduli ya RTK GNSS yenye utendaji wa juu iliyoundwa kwa ajili ya UAVs, robotics, meli za baharini, na magari ya ardhini yanayohitaji kupanua kiwango cha sentimita na mwelekeo sahihi. Inajumuisha mpokeaji wa GNSS wa multi-band u-blox ZED-F9P, kompas ya PNI RM3100 yenye usahihi wa juu, na kifaa chenye kiwango cha IP66 chenye uimara, kinachohakikisha utendaji thabiti katika hali ngumu za nje.
Pamoja na msaada wa GPS (L1C/L2C), GLONASS, Galileo, BeiDou, na QZSS, na uwezo wa kushughulikia mifumo minne ya GNSS kwa wakati mmoja, ZED-F9P Rover inatoa marekebisho ya RTK yenye kuaminika na ya juu ya masafa. Toleo la DroneCAN linaunganisha zaidi STM32G4 MCU, ICM42688 IMU, na barometer ya ICP20100, ikitoa muunganiko wa sensorer bila mshono na uimarishaji wa uunganisho kwa mifumo ya kisasa ya drone.
Vipengele Muhimu
-
mpokeaji wa GNSS wa u-blox ZED-F9P
Mpokeaji wa RTK wa bendi mbili, unaounganisha nyota nyingi, unaounga mkono bendi za L1/L2 kwa usahihi wa kiwango cha sentimita. -
Kompass ya Juu ya Usahihi RM3100
Inatoa data sahihi ya kuelekea bila mwelekeo wa kupotoka, ikiwa na kinga bora dhidi ya kelele na uthabiti wa joto. -
Antenna ya Patch ya Bendi Mbili
Antenna ya keramik iliyojengwa (47.5×47.5mm) yenye L1: 4.0dBi na L2: 1.0dBi faida ya kilele na 20.5 ±1dB faida ya LNA kwa kupokea ishara bora. -
Kichujio cha Ishara cha Juu & Ulinzi wa EMI
Inajumuisha vichujio vitatu vya SAW, LNA, coupler ya mchanganyiko, na vichujio vya band-pass vilivyo ndani kwa ishara safi za GNSS, hata katika mazingira yenye kelele. -
Chaguo la DroneCAN
Processor wa Embedded STM32G4, ICM42688 IMU, na barometer inaruhusu uunganisho wa CAN, bora kwa autopilots za kitaalamu. -
Muundo wa IP66 wa Kijani
Uthibitisho wa hali ya hewa na vumbi, inafaa kwa matumizi ya muda mrefu katika hali ngumu za nje.
✅ZED-F9P dhidi ya NEO-F9P Rover – Ni tofauti gani?
| Feature | ZED-F9P Rover | NEO-F9P Rover |
|---|---|---|
| Mpokeaji wa GNSS | u-blox ZED-F9P | u-blox NEO-F9P |
| Support ya GNSS Band | Dual-band (L1C + L2C) | Single/Dual-band (L1 + L5) |
| Upeo wa Antena wa Peak | L1: 4.0 dBi, L2: 1.0 dBi | L1: 1.8 dBi, L5: 0.5 dBi |
| Usahihi wa Kichwa | 0.4° | 0.3° |
| Vipimo | 78 mm × 22 mm | 62 mm × 21 mm |
| Uzito | 117g | 63.5g |
| Matumizi ya Lengo | Maombi ya utendaji wa juu, ishara yenye nguvu, antena kubwa | Maombi ya uzito mwepesi, ukubwa mdogo |
Chagua ZED-F9P Rover kwa faida kubwa, RTK nyingi zenye nguvu, na uunganisho wa UAV wenye nguvu. Chagua NEO-F9P Rover kwa majukwaa madogo ya UAV ambapo ukubwa na uzito ni muhimu.
Specifikas
| Mfano wa Bidhaa |

|
 |

|
| SKU | SKU12054 | SKU12058 | SKU12059 |
| Aina ya Kiunganishi | GH1.25 kebo ya pini 10 | GH1.25 kebo ya pini 6 | GH1.25 kebo ya pini 4 |
| Bandari zinazofaa | Bandari ya GPS1 ya Holybro | Bandari ya GPS2 ya Holybro au Cubepilot | Bandari ya CAN ya Pixhawk |
| Protokali ya Mawasiliano | UART | UART | DroneCAN |
| MCU IMU Barometa |
Hapana | Hapana |
|
| Magnetometa | Ramani ya RM3100 yenye usahihi wa juu, kelele ya chini | ||
| Maombi | Kituo kinachosonga (Ndege, Gari la Ardhi, Gari la Baharini, nk) |
||
| Mpokeaji wa GNSS | Mpokeaji wa GNSS wa U-blox ZED-F9P wenye usahihi wa juu | GNSS Band |
|
| Idadi ya GNSS zinazofanya kazi kwa pamoja | 4 | ||
| Usahihi wa kuelekeza | 0.4 digrii | ||
| Usahihi wa Nafasi | Usawa & Wima: RTK 0.01m +1ppm CEP | ||
| Antenna |
|
||
| Faida ya Antenna Kuu (MAX) |
|
||
| Upataji |
|
||
| Data na Kiwango cha Sasisho |
|
||
| Kimo cha juu zaidi |
|
||
| Speed ya juu zaidi |
|
||
| Uhisabati |
|
||
| Pulse ya Wakati | Inayoweza kubadilishwa kutoka 0.25hz hadi 10mhz | ||
| Protokali | NMEA, UBX binary, RTCM 3.3 | ||
| Kichujio & Kuongeza nguvu | Triple SAW + LNA Kichujio kwa Kichujio Sahihi cha Ishara & Kuongeza Nguvu ya Ishara Double Hybrid Coupler kwa Kuunganisha Ishara kwa Ufanisi |
||
| Kuondoa Mvurugiko | Ugunduzi wa CW wa Kazi na Kuondoa Kichujio cha Band Pass kilichopo kwenye Bodi |
||
| Kuondoa Udanganyifu | Algorithimu za Juu za Kuondoa Udanganyifu | ||
| Urefu wa Kebuli | 40cm | ||
| Kiwango cha baud: | 115200 5Hz (chaguo-msingi) kinaweza kuwekwa | ||
| Joto la Kazi | -40 °C hadi +85 °C | ||
| Voltage ya Kazi: | 4.75V~5.25V | ||
| Matumizi ya Sasa | ~250mA | ||
| Vipimo | Upana: 78mm Kimo: 22mm | ||
| Daraja la IP | IP66 (Ripoti ya Mtihani) | ||
| Uzito | 117g | ||
Maelezo

Holybro H-RTK ZED-F9P Rover ina u-blox GNSS, upimaji wa RTK, kompasu RM3100, na ulinzi wa IP66.

Kompasu wa Usahihi wa Juu: RM3100 inatoa mwelekeo sahihi. Vipengele vinajumuisha antena kubwa ya dual-band yenye nguvu na baromita ya InvenSense ICP20100. Inapatikana katika toleo la DroneCAN.
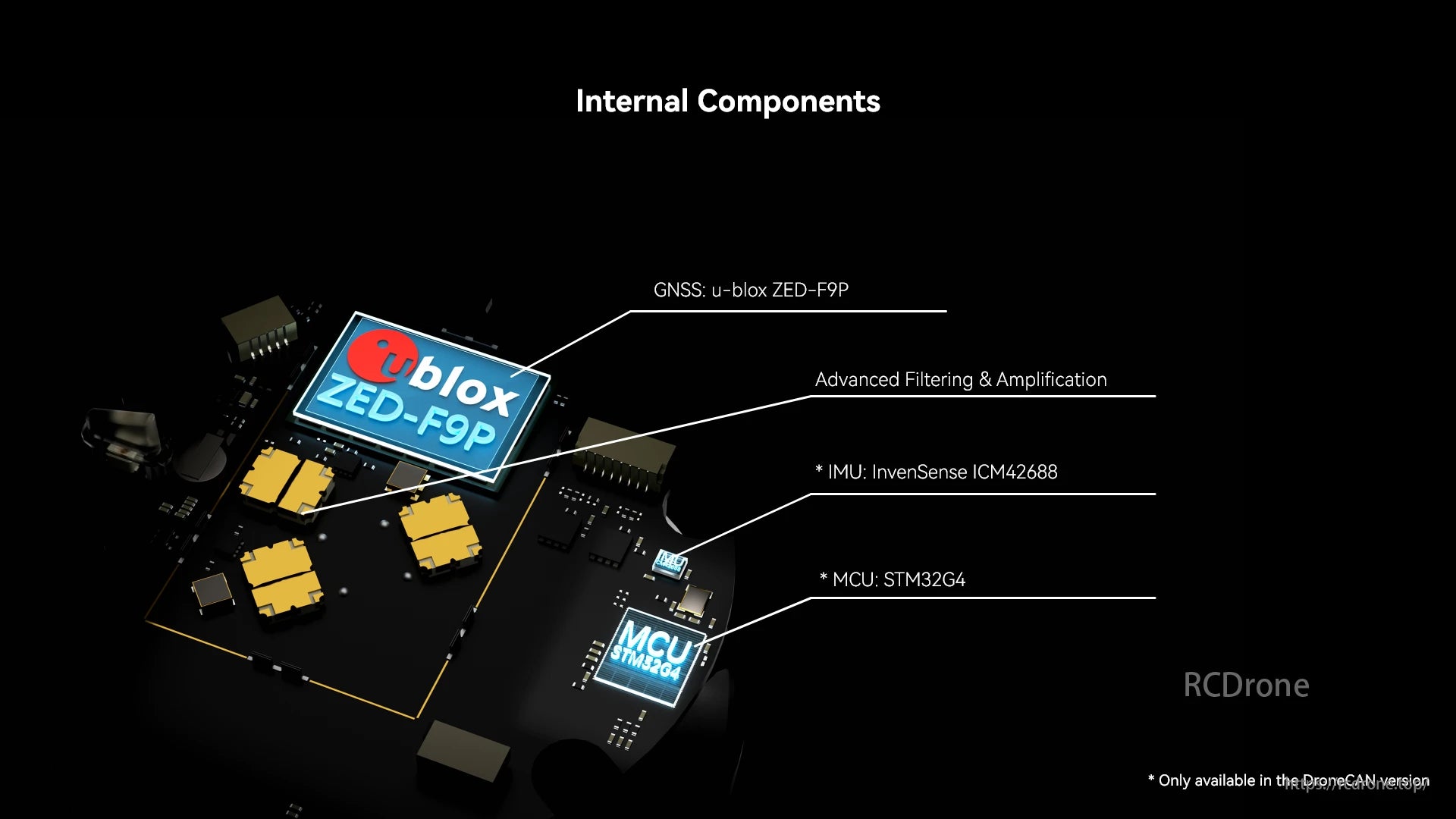
Holybro H-RTK ZED inajumuisha u-blox ZED-F9P GNSS, InvenSense ICM42688 IMU, STM32G4 MCU, uchujaji wa hali ya juu, na nguvu za kuongeza kwa upimaji sahihi.

Ulinzi wa vumbi na maji wa IP66 kwa hali ngumu.
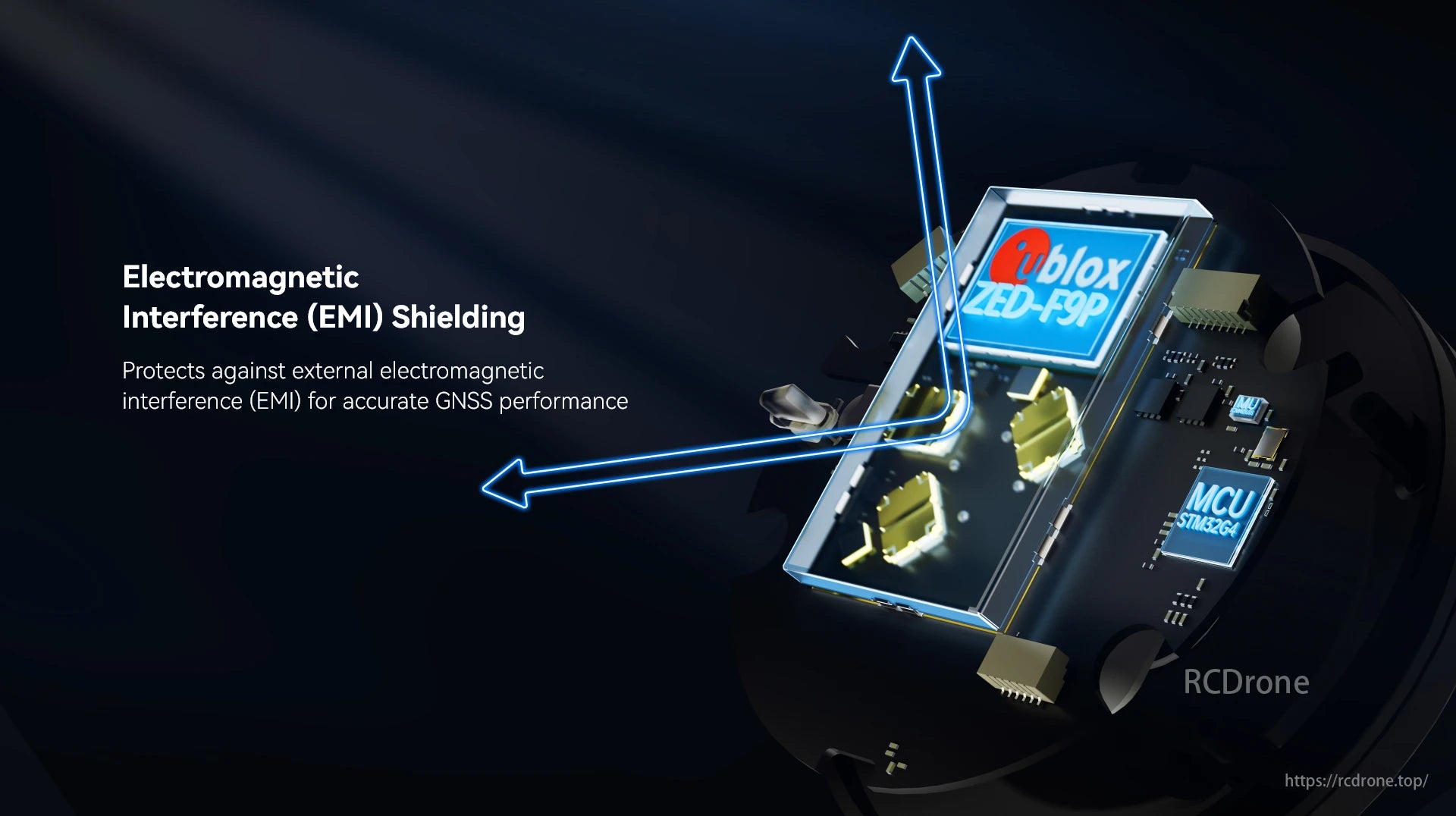
Holybro H-RTK ZED inatoa ulinzi wa EMI, u-blox ZED-F9P, na STM32G4 MCU kwa utendaji sahihi wa GNSS.

Chati ya Wiring ya Mfano
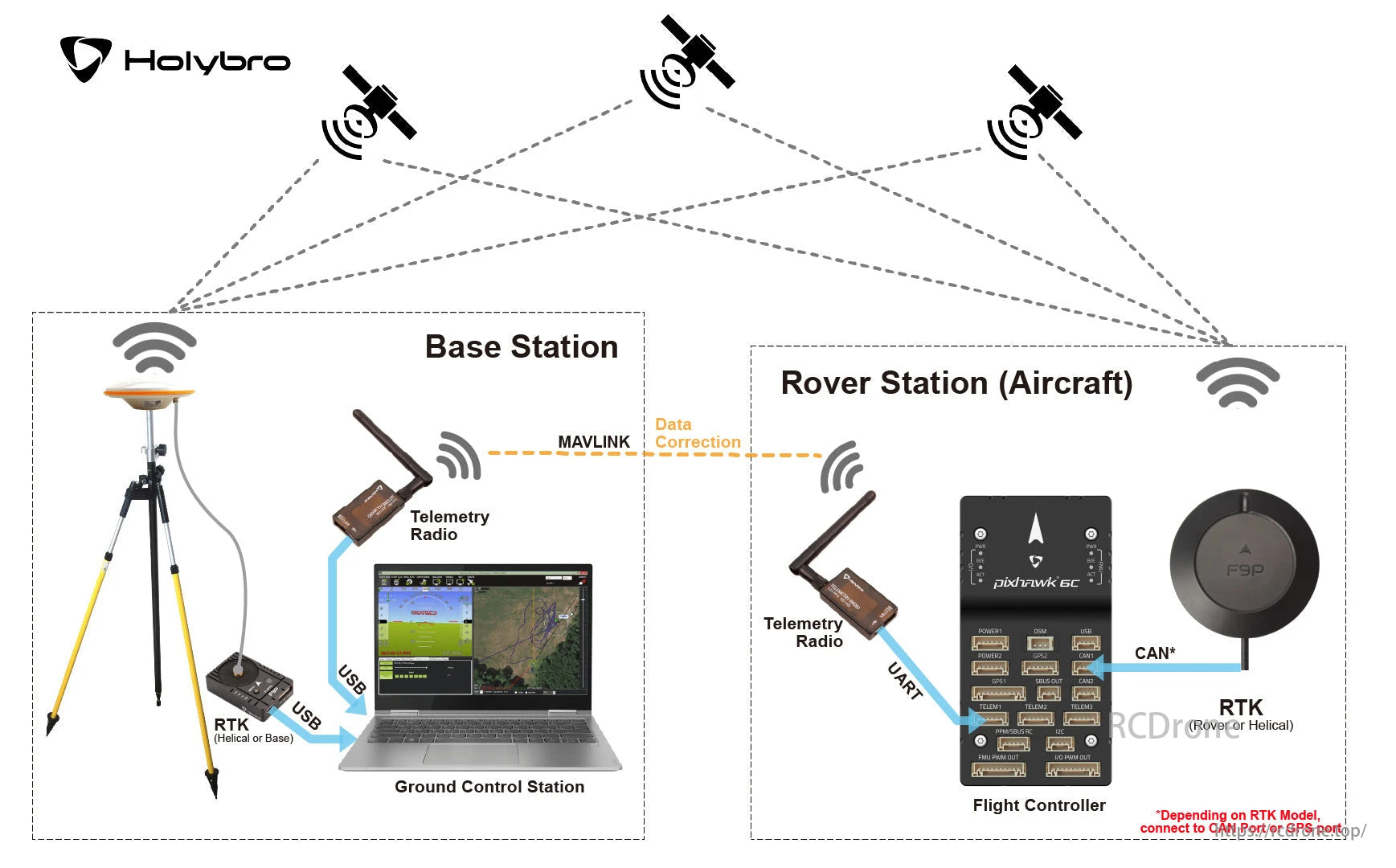
Mpangilio wa Holybro H-RTK ZED unajumuisha vituo vya msingi na rover, redio za telemetry, moduli za RTK, na kidhibiti cha ndege. Marekebisho ya data kupitia MAVLink yanaboresha usahihi wa urambazaji wa ndege.
Viungo vya Marejeo
- Rekodi ya Mabadiliko Kutoka kwa Toleo la Awali
-
Upimaji wa RTK & Ulinganisho na Andrew Tridgell (Ardupilot)
-
Mwongozo wa Mtumiaji: Mipangilio & Kuanzisha (Ardupilot)
- Mwongozo wa Mtumiaji: Mipangilio & Kuanzisha (PX4)
- GPS Heading/Yaw (Pia inajulikana kama Msingi unaohama) Mwongozo
- Pinout
- Vipimo
- Pakua
-
Kwa maelezo mengine ya kiufundi na mwongozo wa mtumiaji, tafadhali angalia ukurasa wa hati hapa.
Kifurushi Kimejumuisha:
- 1x H-RTK ZED-F9P Rover
- 1x GPS UART hadi USB Converter (Kwa SKU12054,12058)
- 1x Kifaa cha GPS cha Nyuzi za Kaboni kilichowekwa
Related Collections










