Holybro Pixhawk 4 Autopilot Flight Controller
Holybro Pixhawk 4 Autopilot Flight Controller
HolyBro
Couldn't load pickup availability
Pixhawk ®4 ina teknolojia ya hali ya juu ya kichakataji kutoka STMicroelectronics®, teknolojia ya kihisi kutoka Bosch®, InvenSense®, na mfumo wa uendeshaji wa wakati halisi wa NuttX, unatoa utendaji wa ajabu, kunyumbulika na kutegemewa kwa kudhibiti gari lolote linalojiendesha. .
Kidhibiti kidogo cha Pixhawk 4 kina kumbukumbu ya 2MB na RAM ya 512KB. Kwa kuongezeka kwa nguvu na rasilimali za RAM, wasanidi wanaweza kuwa na tija na ufanisi zaidi na kazi yao ya maendeleo. Algorithms ngumu zaidi na miundo inaweza kutekelezwa kwenye majaribio ya kiotomatiki.
IMU za utendaji wa juu, zenye kelele ya chini kwenye ubao zimeundwa kwa ajili ya programu za uimarishaji. Mawimbi ambayo tayari ya data kutoka kwa vitambuzi vyote huelekezwa ili kutenganisha pini za kukatiza na kukamata kipima muda kwenye majaribio ya kiotomatiki, hivyo kuruhusu uwekaji muhuri wa muda kwa usahihi wa data ya vitambuzi. Vitengo vipya vilivyoundwa vya kutenganisha mtetemo huwezesha usomaji sahihi zaidi, na kuruhusu magari kufikia utendakazi bora wa jumla wa ndege.
Mabasi mawili ya nje ya SPI na mistari sita ya kuchagua chip inayohusishwa huruhusu kuongeza vihisi vya ziada na upakiaji wa malipo yaliyounganishwa kwa SPI. Kuna jumla ya mabasi manne ya I2C, mawili yamejitolea kwa matumizi ya nje na mawili yakiwa yamewekwa katika makundi na bandari za mfululizo za moduli za GPS/Compass.
Kumbuka:
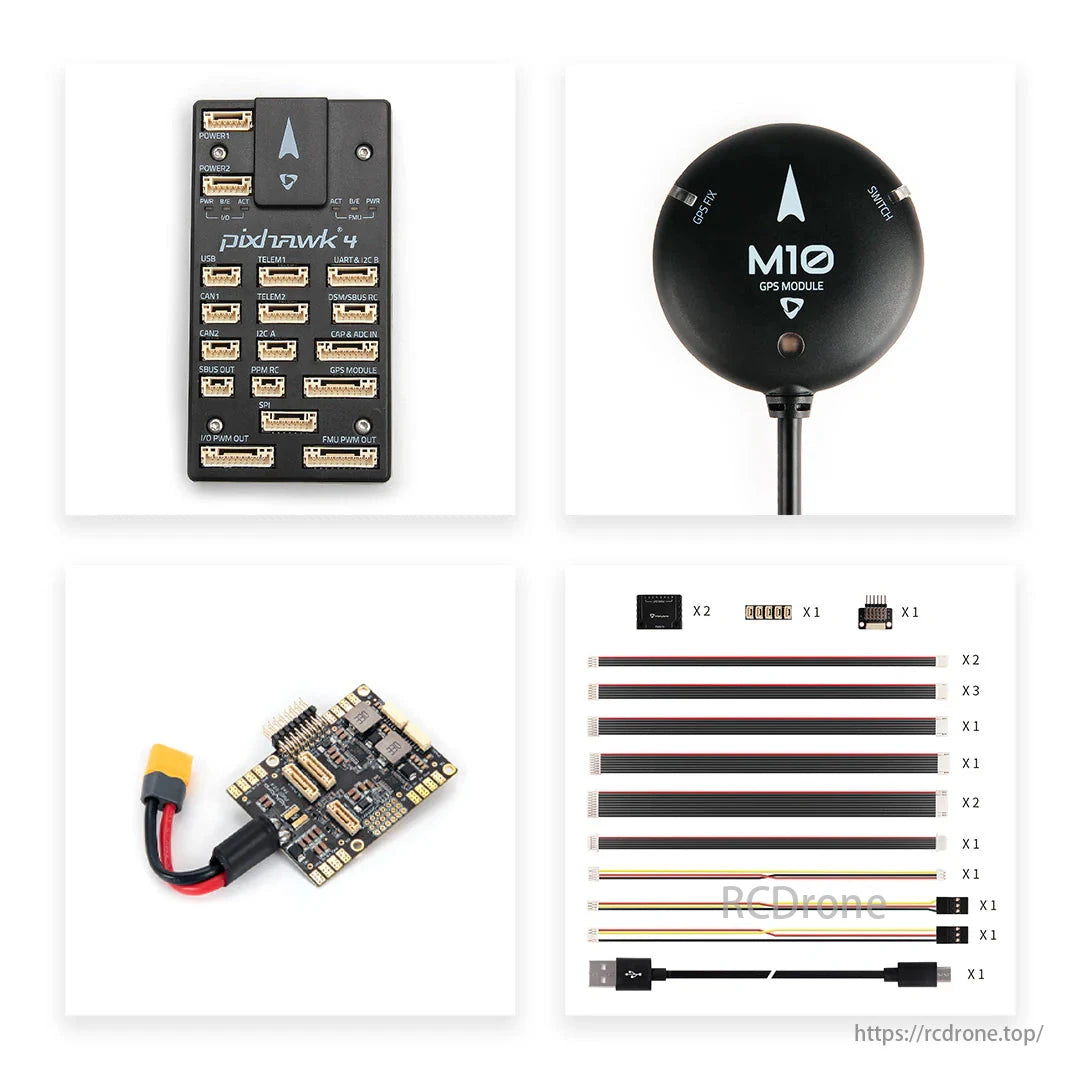
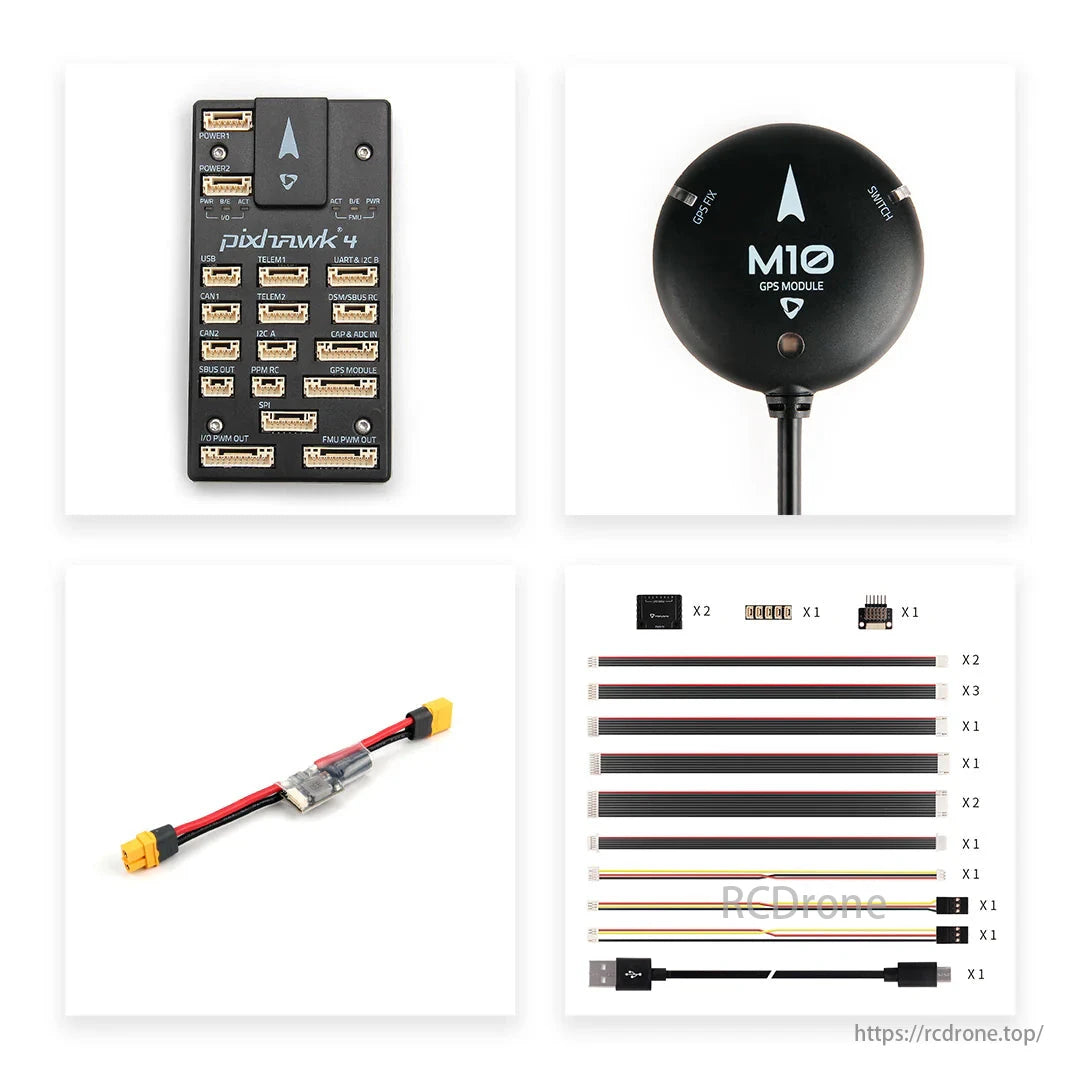
- GPS ya M10 Inahitaji PX4 1.14 & ArduPilot 4.3 au mpya zaidi.
- Chati ya kulinganisha ya moduli ya nguvu
Vipimo vya Kiufundi
- Kichakataji kikuu cha FMU
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216MHz, kumbukumbu 2MB, RAM ya 512KB
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216MHz, kumbukumbu 2MB, RAM ya 512KB
- Kichakataji cha IO
- STM32F103 - 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM (Ya Sasa)
- STM32F100 - 32 Bit Arm ® Cortex® -M3, 24MHz, 8KB SRAM (Imezimwa)
- Sensorer za ubao
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055/ICM-20602
- Mag: IST8310
- Barometer: MS5611
- Accel/Gyro: ICM-20689
Data ya Umeme
- Pato la moduli ya nguvu: 4.9 ~ 5.5V
- Upeo wa voltage ya pembejeo: 6V
- Kiwango cha juu cha kuhisi cha sasa: 120A
- Uingizaji wa Nishati wa USB: 4.75~5.25V
- Uingizaji wa Reli ya Servo: 0~36V
- Joto la Kuendesha: -25-85°C
Data ya Mitambo
- Vipimo: 44x84x12mm
- Uzito (kesi ya plastiki): 33.3g
- Uzito (kesi ya alumini): 49g
Vipakuliwa:
SKU 11032/11035 Inajumuisha:
- Kidhibiti cha Ndege cha Pixhawk 4 (Plastiki au Alumini)
- Seti ya Cable
SKU 20045/20046/20114/20115 Inajumuisha:
- Kidhibiti cha Ndege cha Pixhawk 4(Plastiki au Alumini)
- Moduli ya Nguvu: PM02 V3 12S/PM07 14S
- Seti ya Cable
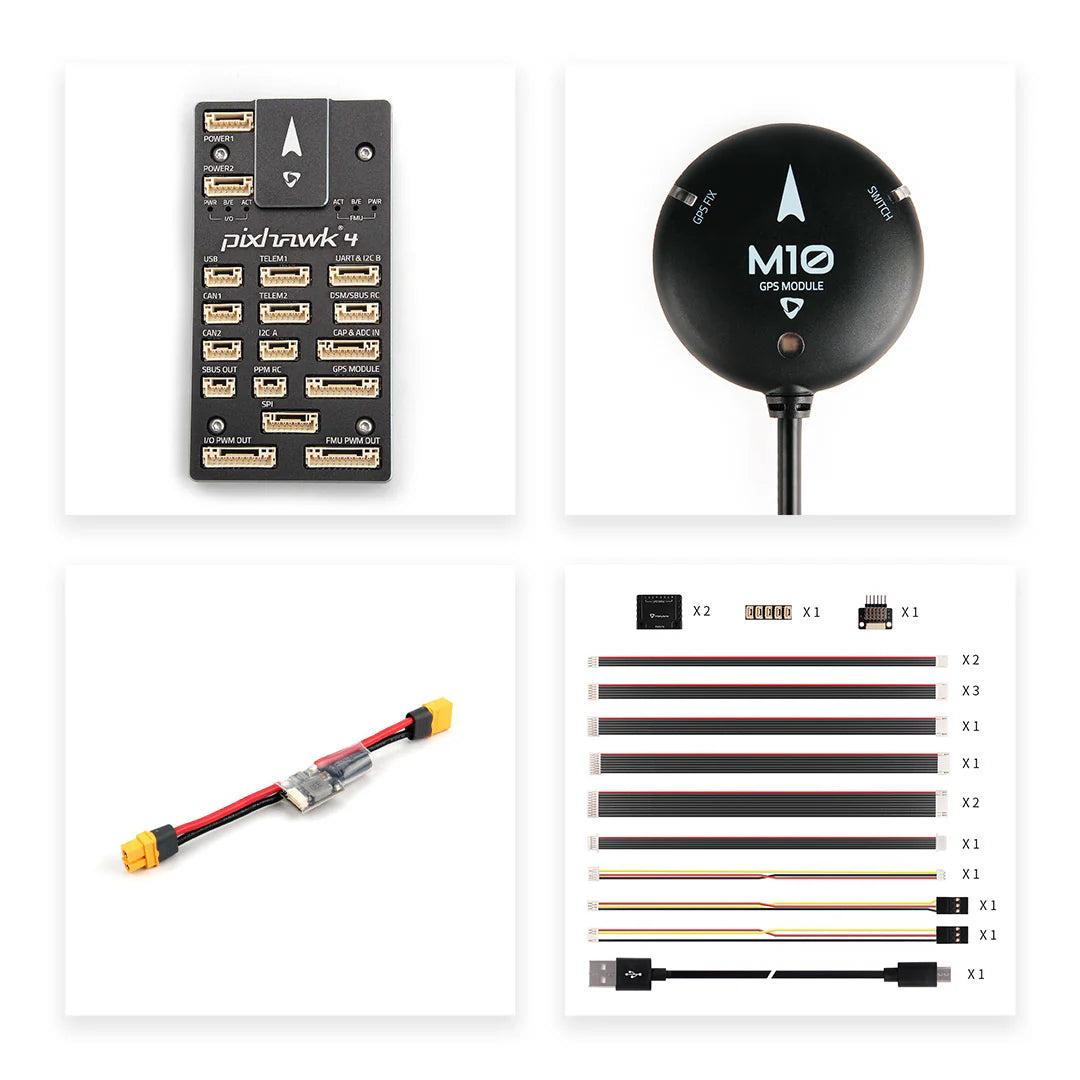
SKU 20139/20140/20141/20142/20269/20270/20271/20272 Inajumuisha:
- Kidhibiti cha Ndege cha Pixhawk 4
- Moduli ya Nguvu: PM02 V3 12S/PM07 14S
- GPS: M9N/M10
- Seti ya Cable

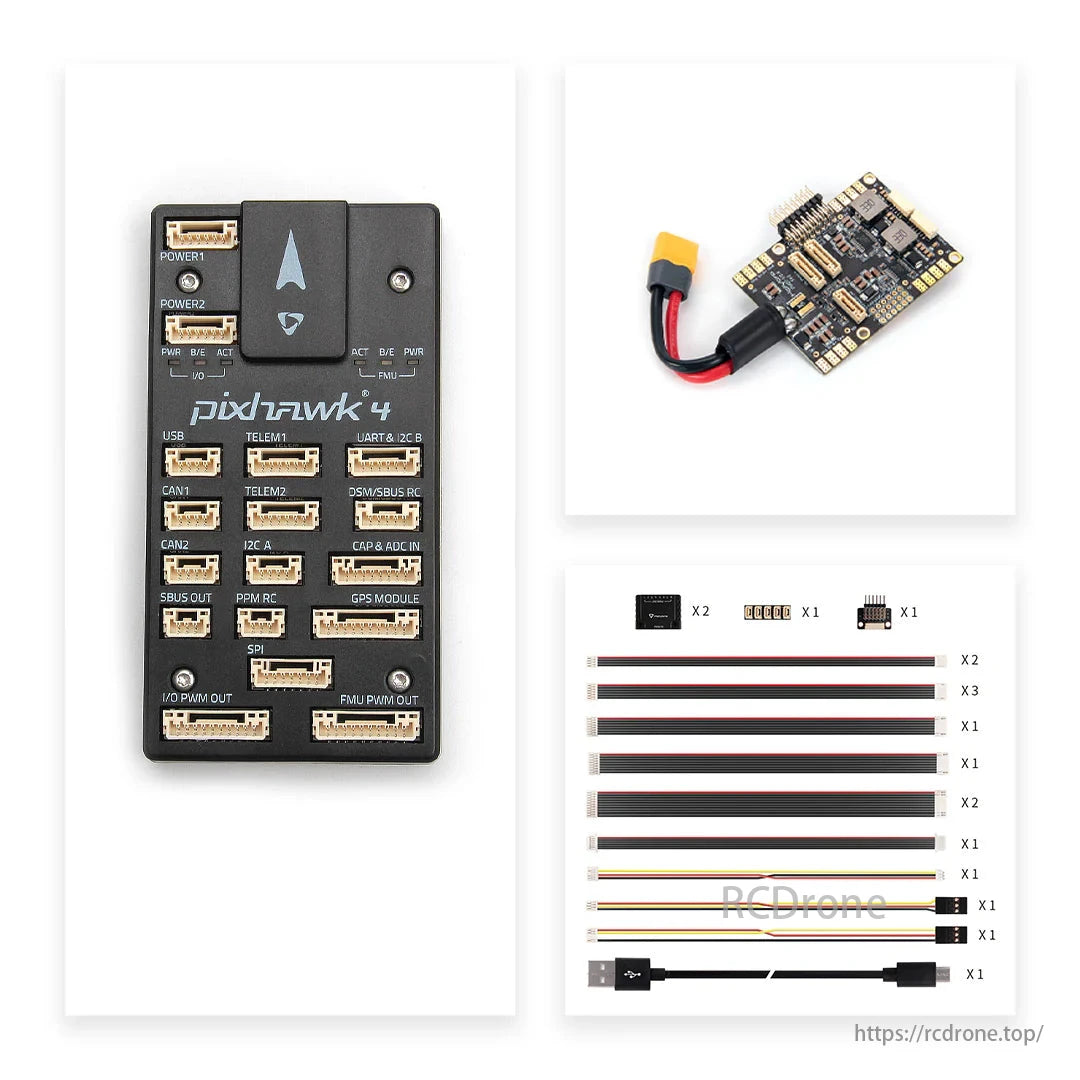
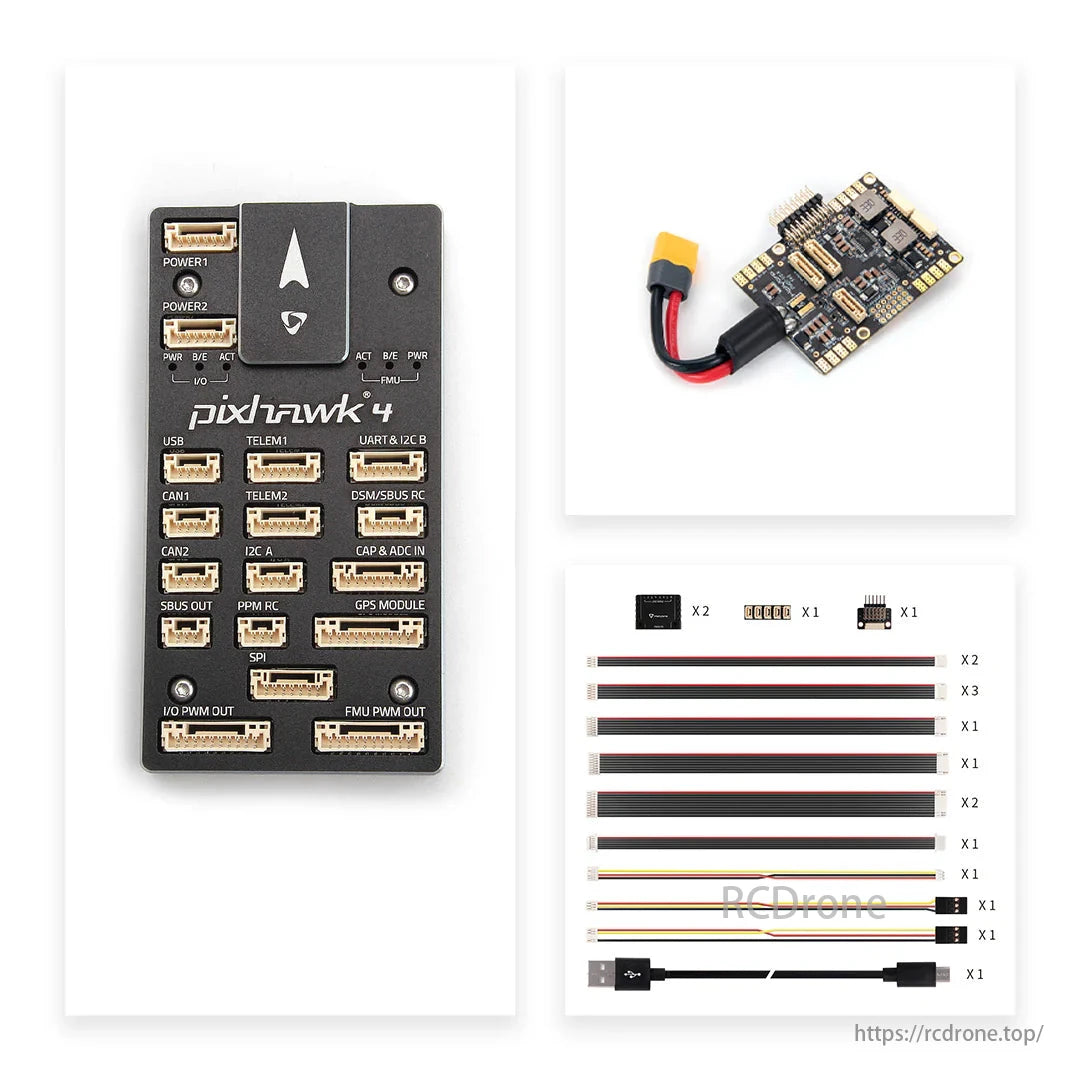
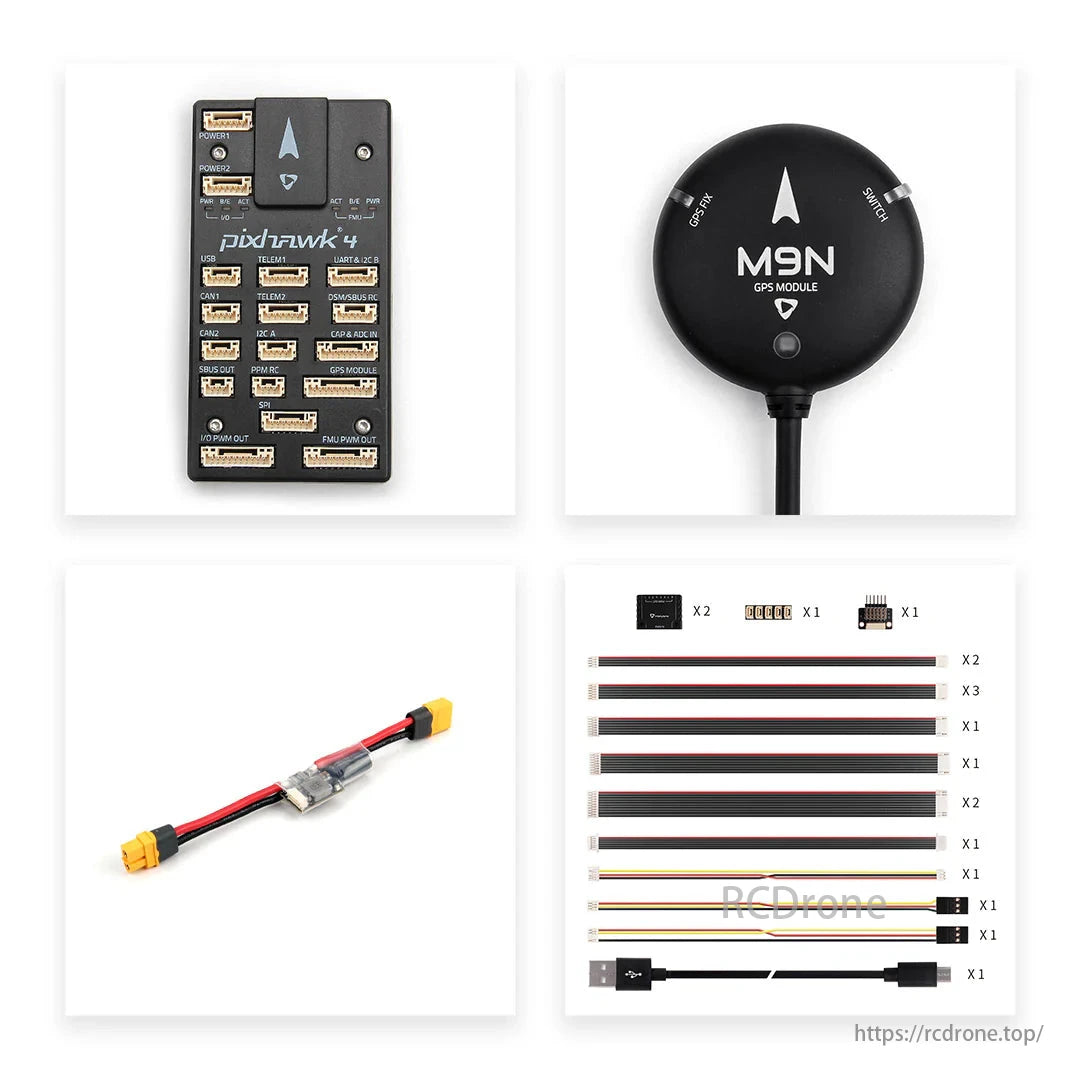
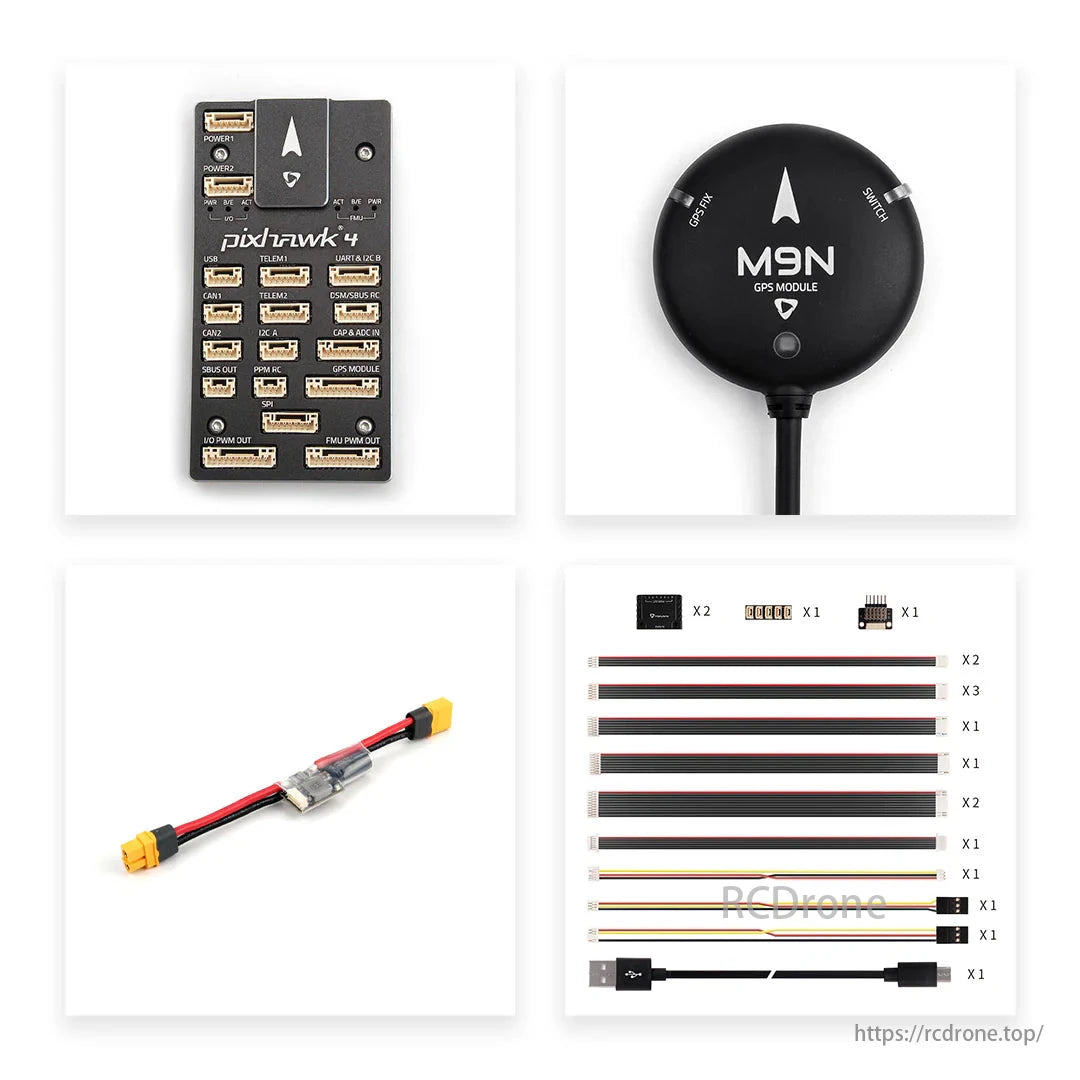
Kidhibiti cha safari ya ndege cha Pixhawk 4 chenye milango mbalimbali ikijumuisha USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI, na GPS MODULE.

Kidhibiti cha ndege cha Pixhawk, kinachoendeshwa na mfumo wa PX4 wa kujiendesha.

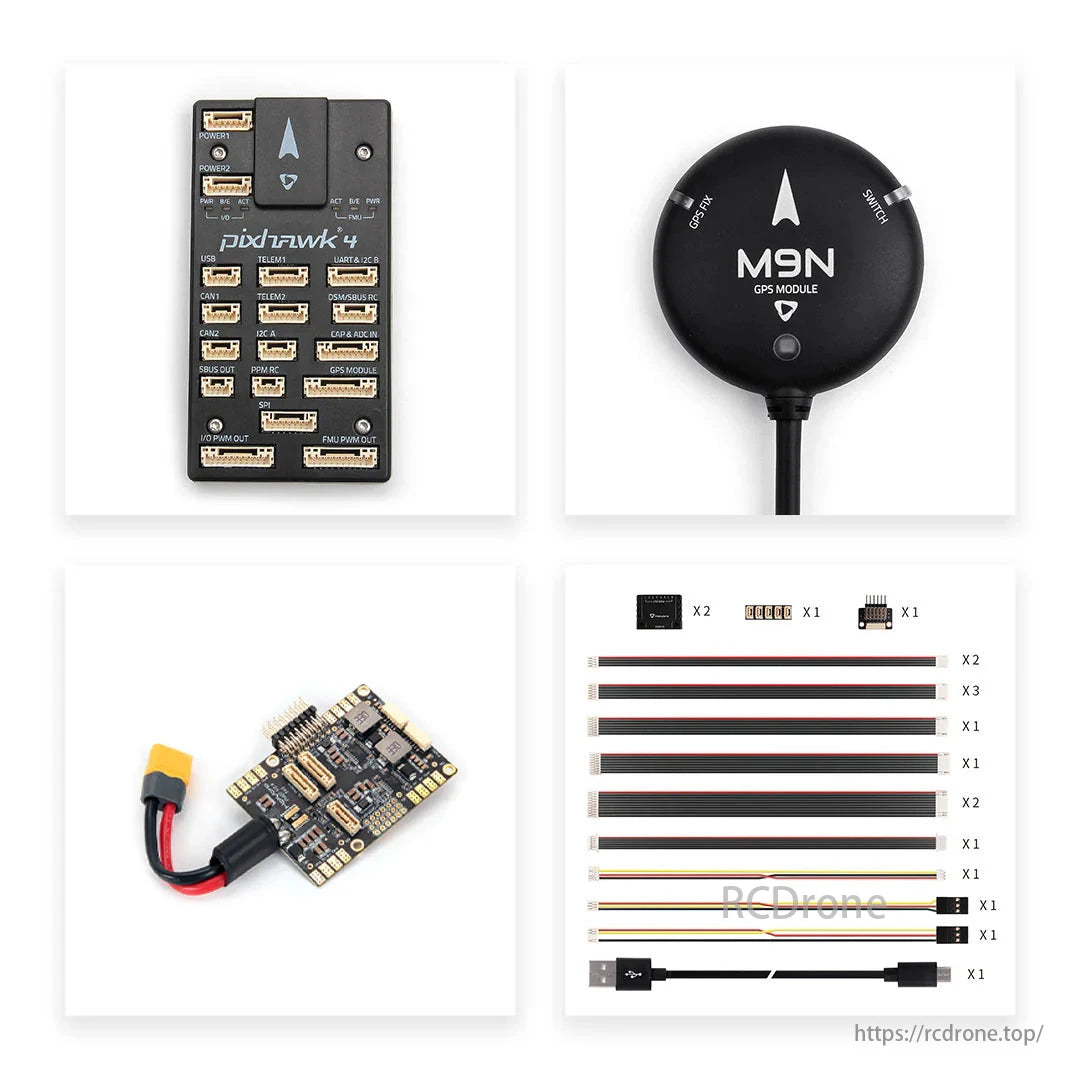
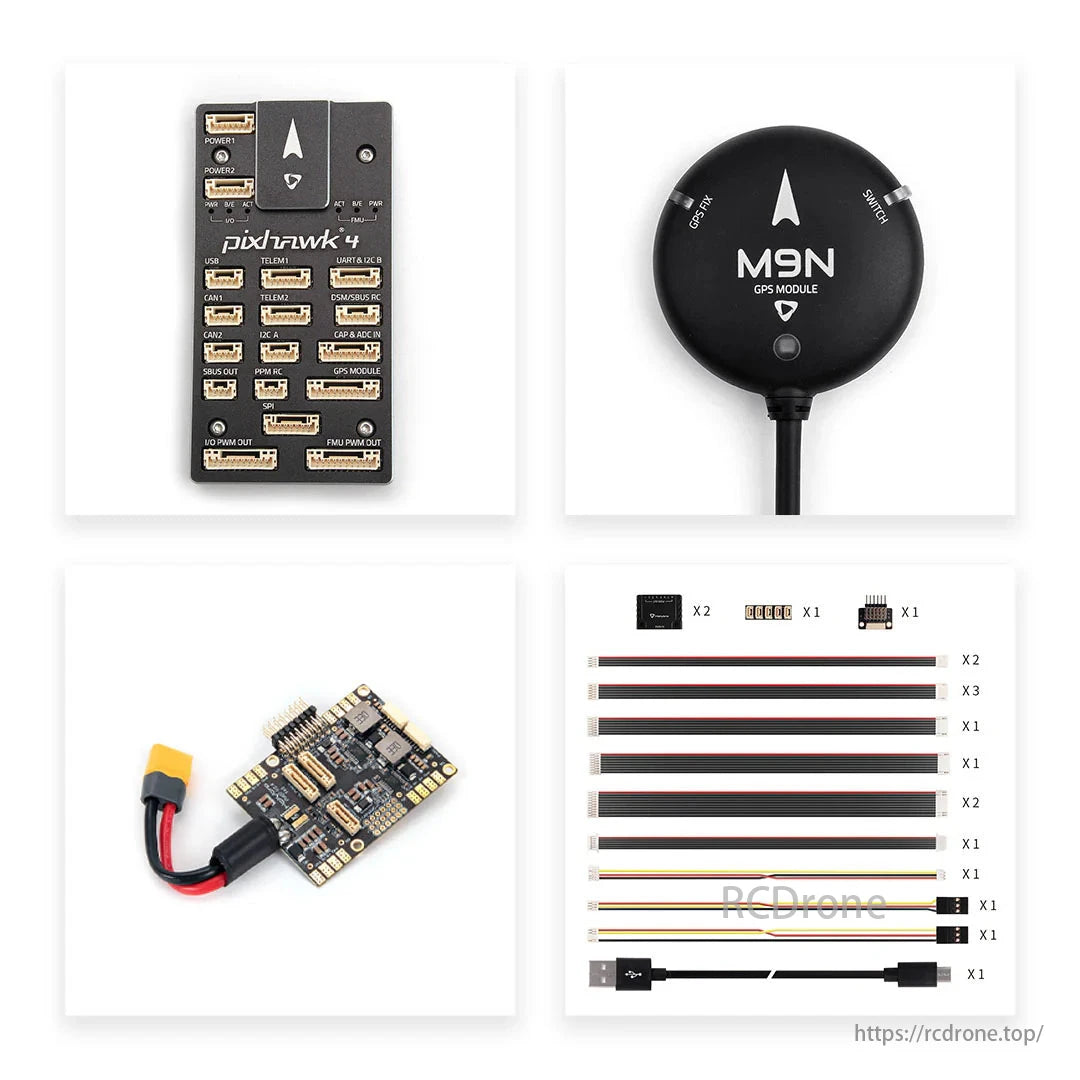
Kidhibiti cha ndege cha Pixhawk 4, moduli ya GPS ya M9N, moduli ya nguvu iliyo na kiunganishi cha XT60, na nyaya mbalimbali za kuunganisha RC drone.

Kidhibiti cha ndege cha Pixhawk 4 chenye bandari mbalimbali ikiwa ni pamoja na USB, CAN, na moduli ya GPS. Inajumuisha moduli ya nguvu na nyaya nyingi za miunganisho.

Kidhibiti cha ndege cha Pixhawk 4, moduli ya GPS ya M9N, moduli ya nguvu iliyo na kiunganishi cha XT60, na nyaya mbalimbali za miunganisho.
Related Collections