Holybro Pixhawk 6X (ICM-45686) Kidhibiti cha Ndege – IMU Tatu za Akiba, STM32H753, Ethernet, Inaoana na PX4 & ArduPilot
Holybro Pixhawk 6X (ICM-45686) Kidhibiti cha Ndege – IMU Tatu za Akiba, STM32H753, Ethernet, Inaoana na PX4 & ArduPilot
HolyBro
Couldn't load pickup availability
Muhtasari
Holybro Pixhawk 6X (ICM-45686) ni kidhibiti cha ndege cha autopilot chenye utendaji wa juu, kilichoundwa kwa ajili ya matumizi magumu ya drones za viwandani na kibiashara. Ikiwa na ICM-45686 IMUs zenye BalancedGyro™ teknolojia, barometers mbili, na processor ya STM32H753 inayofanya kazi kwa 480 MHz, Pixhawk 6X inatoa uaminifu usio na kifani, utendaji wa wakati halisi, na kubadilika. Muundo wake wa modular, kuzuia vibration kwa kiwango cha juu, na kiunganishi cha Ethernet vinaufanya kuwa bora kwa mifumo ya UAV inayohitaji udhibiti thabiti, usahihi, na uwezo wa kubadilika kwa misheni.
Vipengele Muhimu
-
Uhakikisho wa Triple IMU: 3x ICM-45686 IMUs (±32g) zikiwa na teknolojia ya BalancedGyro™ kwa urambazaji wa inerti usio na makosa
-
Baromita Mbili: ICP20100 na BMP388 kwa usahihi wa juu wa urefu
-
Processor ya Kasi ya Juu: STM32H753 Cortex-M7, 480MHz, ikiwa na 2MB Flash & 1MB RAM
-
Muundo wa Moduli: Unatenganisha FMU, IMU, na bodi ya msingi, ikihusishwa kupitia 100-pin & 50-pin Pixhawk® Bus
-
Bodi ya IMU Inayodhibitiwa na Joto: Inahakikisha utendaji bora wa sensorer katika viwango tofauti vya joto
-
Ushirikiano wa Ethernet: Inasaidia mawasiliano ya kasi ya juu na kompyuta za misheni
-
Uungwaji Mkono wa Moduli ya Nguvu ya Kidijitali: Inatoa vipimo sahihi zaidi vya voltage na sasa
Mfumo wa Kutengwa wa Juu: Nyenzo imara, iliyoundwa maalum inatoa kupunguza vibration ya kiwango cha juu
-
Ulinganifu wa Firmware: Inatumwa na PX4 (v1.14.3+), inasaidia ArduPilot (v4.5.0+)
Maelezo
Processors & Sensori
| Sehemu | Maelezo |
|---|---|
| FMU Processor | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO Processor | STM32F103, ARM Cortex-M3, 72MHz |
| IMU Sensori | 3x ICM-45686 (BalancedGyro™) |
| Barometer | ICP20100 & BMP388 |
| Magnetometer | BMM150 |
| Sehemu Salama | NXP SE050 Plug & Trust |
Parameta
| Parameta | Value |
|---|---|
| Voltage ya Juu ya Kuingiza | 6V |
| Kuingiza Nguvu ya USB | 4.75~5.25V |
| Voltage ya Servo Rail | 0~36V |
| Telem1 & GPS2 Kiwango cha Mvutano | 1.5A pamoja |
| Kiwango cha Mvutano kwa Bandari Nyingine | 1.5A pamoja |
| Mvutano wa Ishara ya PWM | Default 3.3V (inaweza kubadilishwa kuwa 5V kupitia upinzani) |
| Joto la Kufanya Kazi | -25°C hadi +85°C |
Vipimo vya Kifaa & Uzito
| Sehemu | Vipimo (mm) | Uzito (g) |
|---|---|---|
| Kidhibiti cha Ndege | 38.8 x 31.8 x 16.8 | 31.3g |
| Jukwaa la Kawaida | 52.4 x 102 x 16.7 | 72.5g |
| Mini Baseboard | 43.4 x 72.8 x 14.2 | 26.5g |
Ulinganifu wa Firmware
-
PX4: Inasaidiwa kikamilifu kuanzia toleo 1.14.3 na juu
-
ArduPilot: Inasaidiwa kikamilifu kuanzia toleo 4.5.0 na zaidi
-
Kuunga mkono flashing ya firmware kupitia Mission Planner au QGroundControl
Maombi
Inafaa kwa kuunganishwa katika:
-
Drone za viwandani
-
Mifumo ya UAV ya kibiashara
-
Ndege za VTOL
-
Majukwaa ya utafiti wa kitaaluma
-
Misheni ya sensor nyingi na ya kuaminika sana
Maelezo

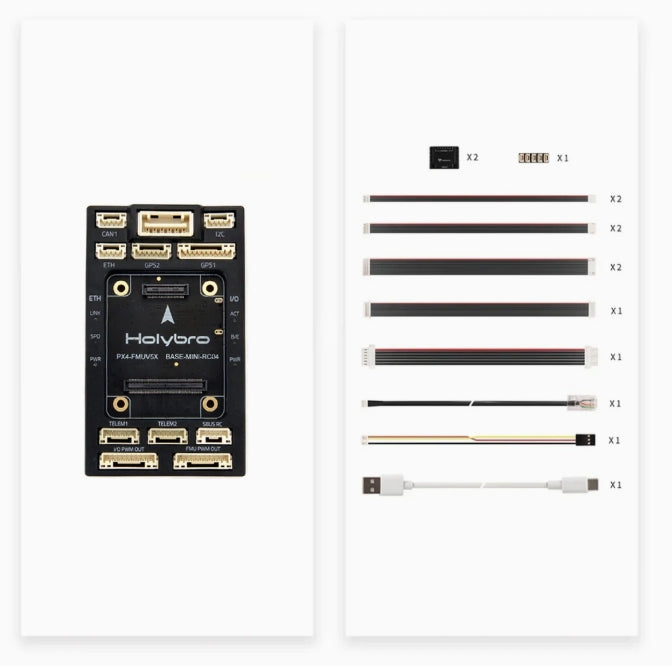
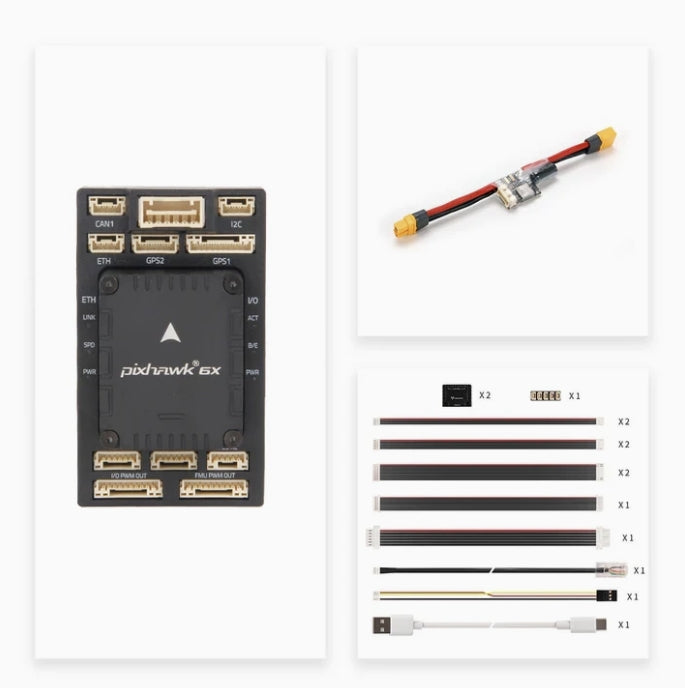
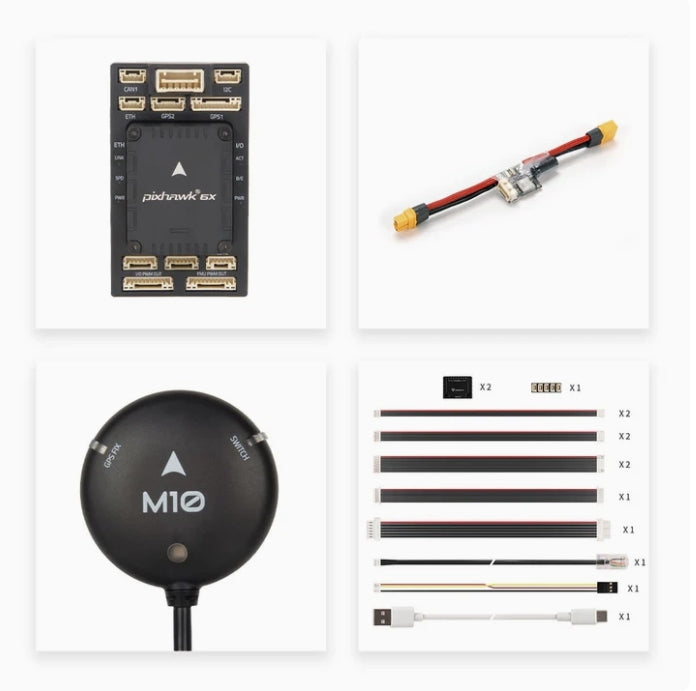
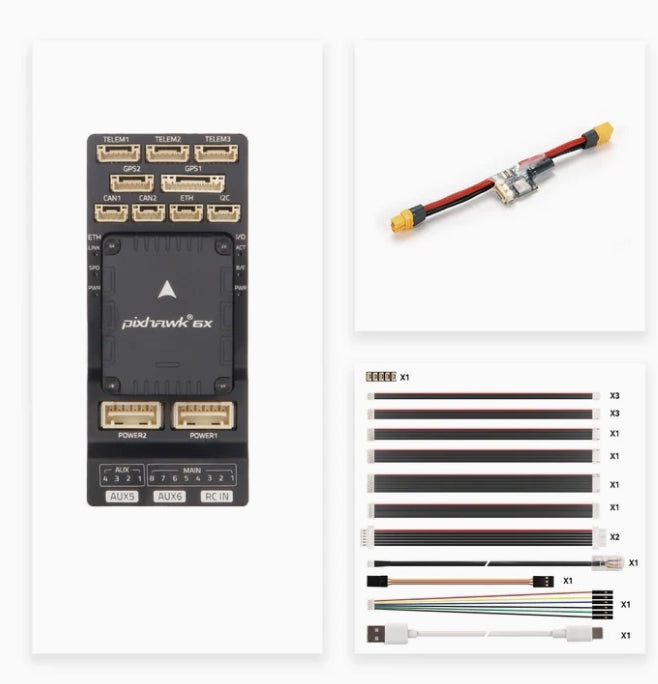
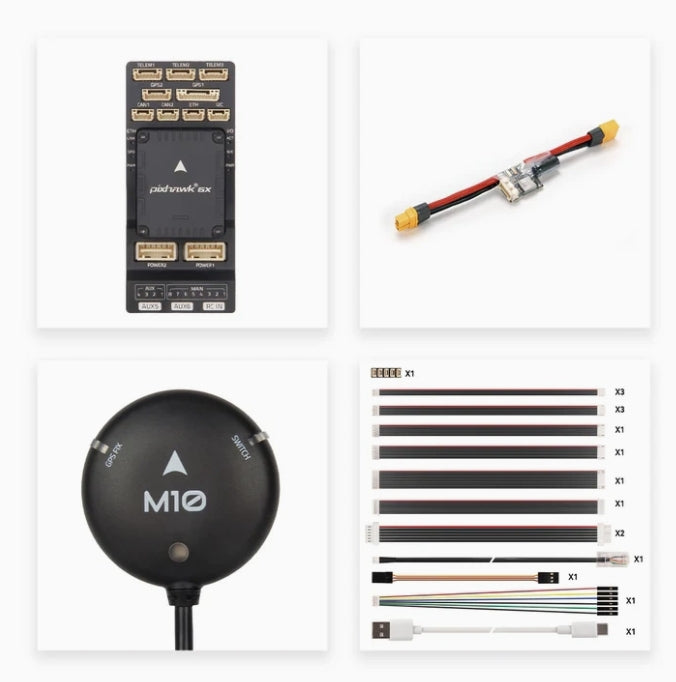
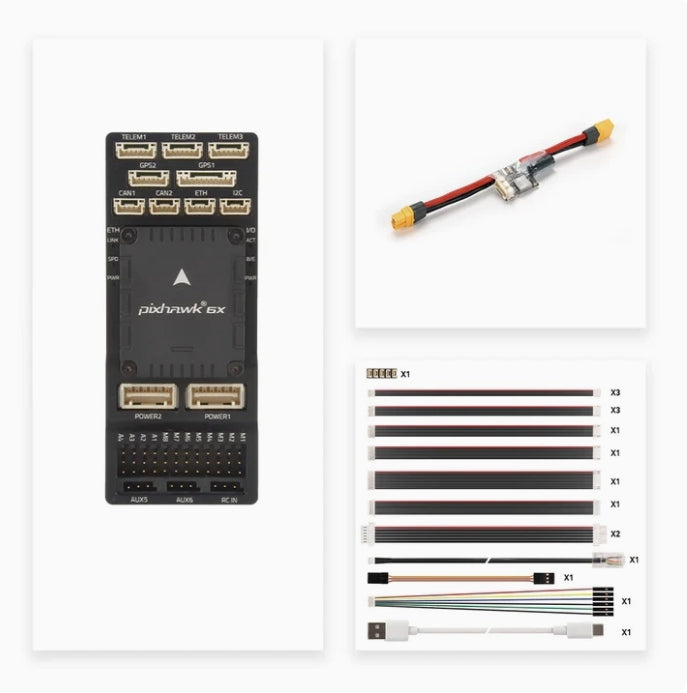
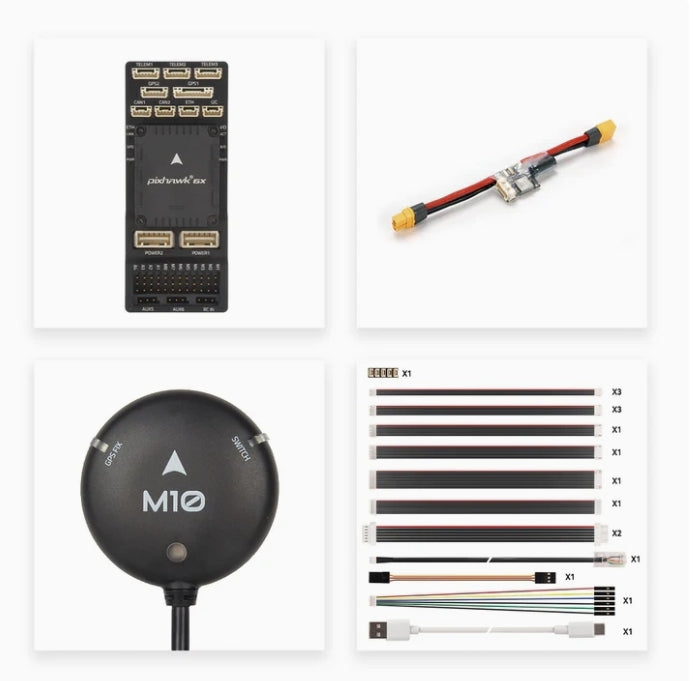
Pixhawk 6X inatoa muundo mwembamba zaidi na mifano miwili. Ina kipengele kilichoboreshwa cha pini kwa ajili ya kuunganishwa na utendaji bora, na kuifanya iwe bora kwa maombi ya juu. Chagua mfano sahihi kwa mahitaji yako.
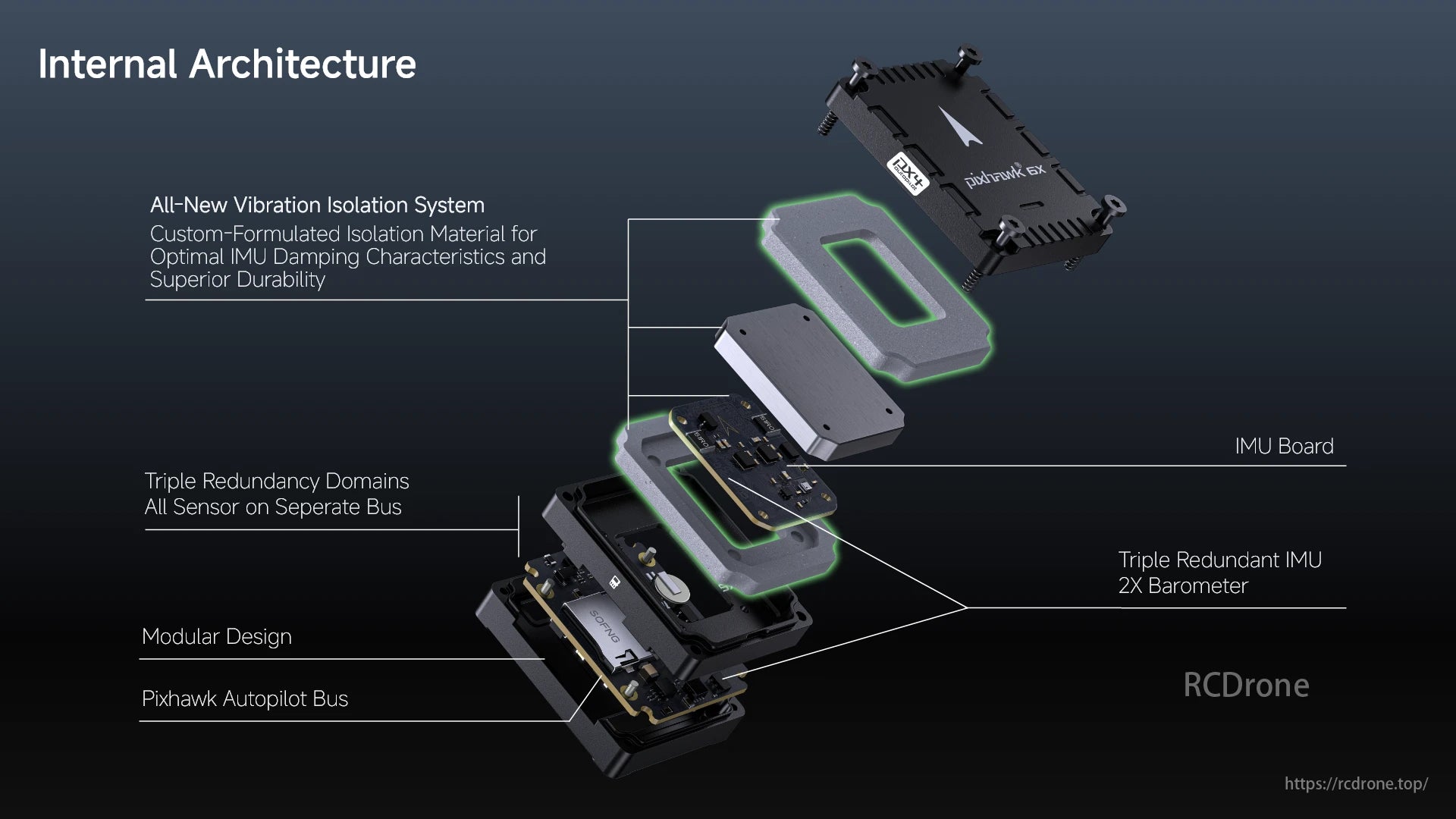
Holybro Pixhawk 6X inatoa ulinzi wa mtetemo, upungufu wa mara tatu, muundo wa moduli, basi la autopilot, bodi ya IMU, na baromita 2x kwa utendaji wa hali ya juu.
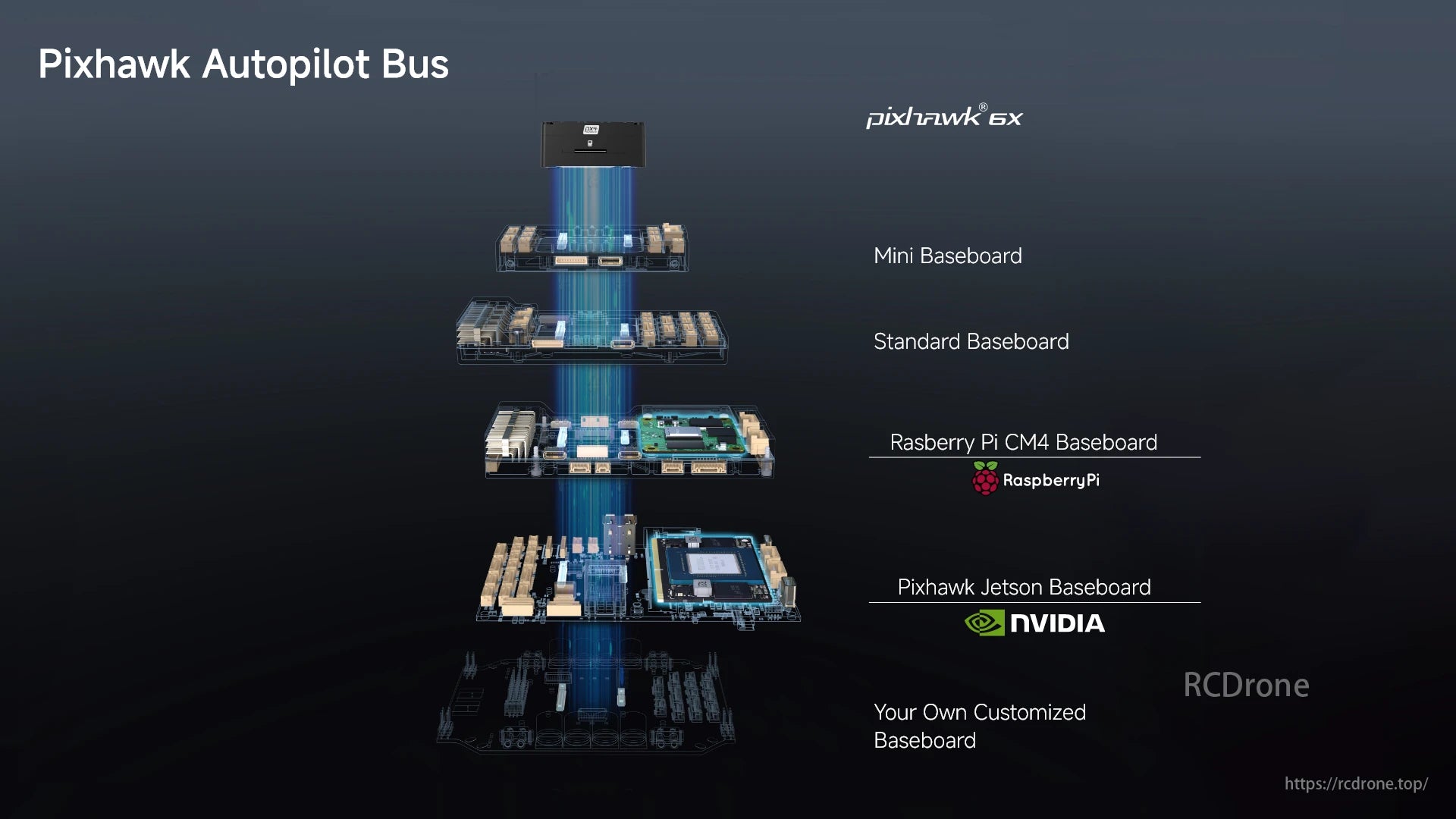
Basi la Autopilot la Pixhawk linajumuisha Pixhawk 6X, Mini Baseboard, Standard Baseboard, Raspberry Pi CM4 Baseboard, Jetson Baseboard, na chaguo maalum.

Upinzani wa fidia ya joto, IMU ya ziada & baromita, teknolojia mbalimbali za sensor, na nyenzo za kutenga zinahakikisha usahihi.

Basi la Autopilot la Pixhawk, Processor ya STM H753 32-Bit (480 MHz), Invensense ICM45686 IMU yenye Teknolojia ya BalancedGyro, na Kipengele Salama cha NXP EdgeLock SE050 vimejumuishwa kwenye Bodi ya FMU.
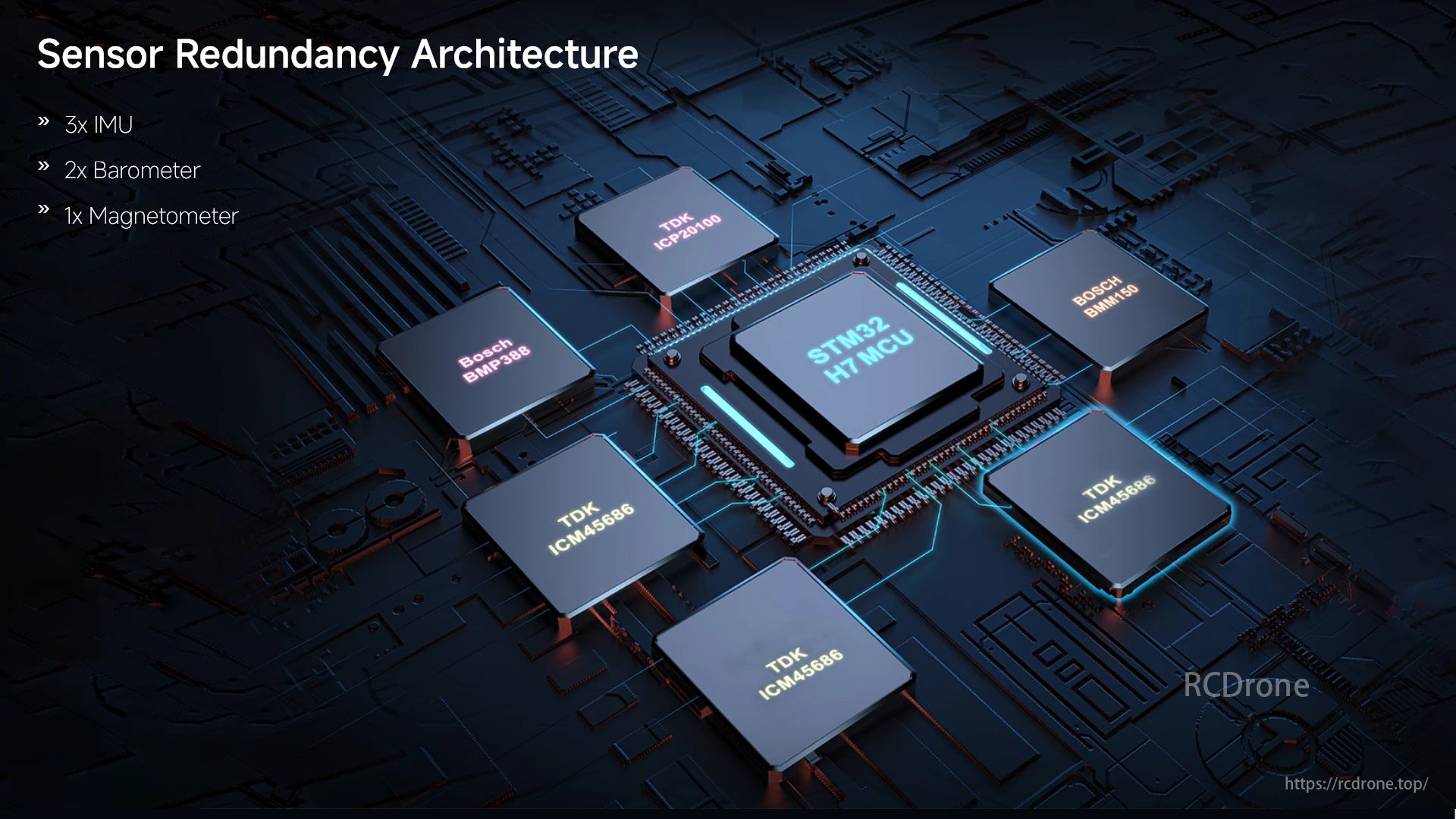
Muundo wa ziada wa sensor wenye 3x IMU, 2x baromita, na 1x magnetometer.Vipengele vya STM32 H7 MCU, TDK ICM-45686, Bosch BMP388, na sensorer za BMM50 kwa utendaji bora zaidi.
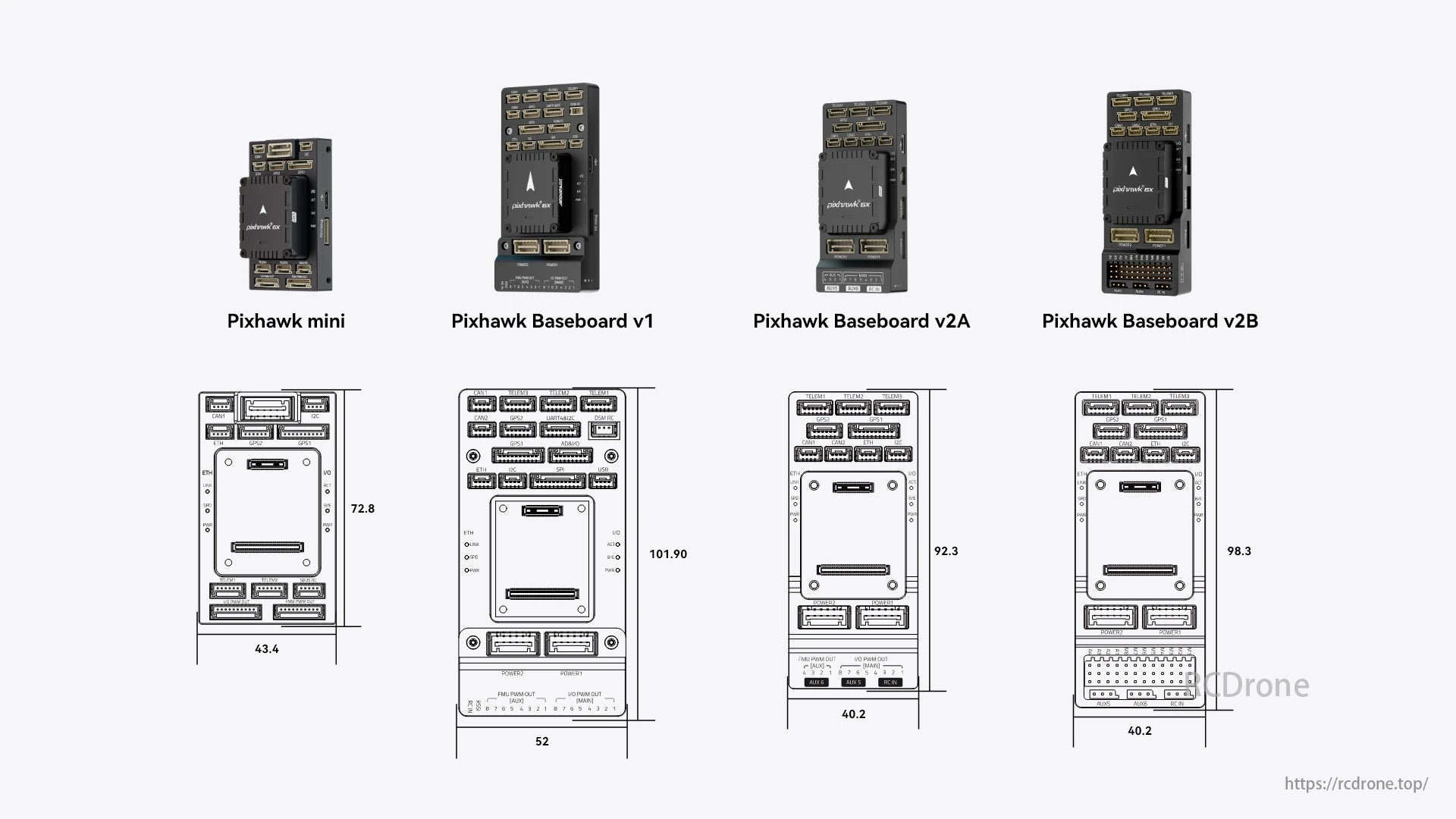
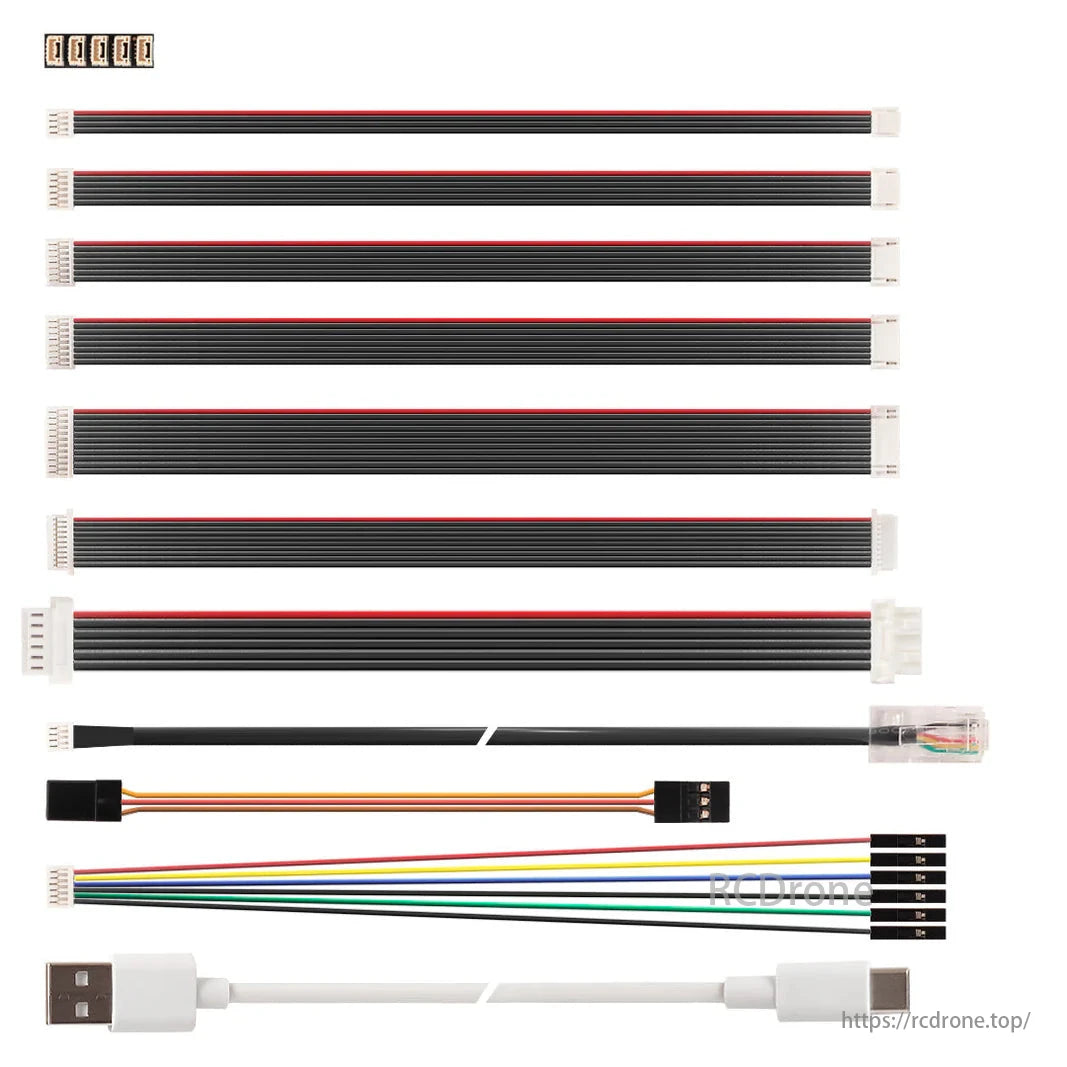
Vikontrola vya ndege vya Pixhawk mini, Baseboard v1, v2A, na v2B zikiwa na vipimo: 43.4x72.8, 52x101.90, 40.2x92.3, na 40.2x98.3 mtawalia. Bandari na viunganishi mbalimbali vinaonekana kwenye kila mfano.
Related Collections