Holybro Pixhawk 6X Pro Kidhibiti cha Ndege cha Kiotomatiki
Holybro Pixhawk 6X Pro Kidhibiti cha Ndege cha Kiotomatiki
HolyBro
Couldn't load pickup availability
Pointi Muhimu ya Kubuni
- Utendaji wa juu ADIS16470 IMU ya Viwanda yenye masafa ya nguvu ya kipima kasi cha juu (±40 g), kamili kwa hisia sahihi za mwendo katika uhitaji wa programu za UAV
- Nyenzo zote Mpya za hali ya juu za kutengwa za mtetemo na masafa ya sauti katika wigo wa juu, bora kwa matumizi ya viwandani na kibiashara.
- IMU mara tatu isiyo na kipimo na kipimo kisicho na kipimo mara mbili kwenye mabasi tofauti
- Utendaji wa juu STM32H753 Processor
- Kidhibiti cha kawaida cha ndege: IMU iliyotenganishwa, FMU na mfumo wa Msingi
- Muundo unaoendeshwa na usalama hujumuisha vitambuzi kutoka kwa watengenezaji tofauti na safu za miundo
- LDO Huru huwezesha kila kihisi na udhibiti huru wa nishati.
- Kiolesura cha Ethaneti cha muunganisho wa kompyuta wa misheni ya kasi ya juu. Transformerless inaweza kupatikana kwa kutumia vipingamizi 50 vya kusimamisha Ohm kwenye kifaa kinacholengwa (Kukomesha AN2190 50 Ohm)
- Ubao wa IMU unaodhibitiwa na halijoto, kuruhusu halijoto bora zaidi ya kufanya kazi ya IMU
- Hali ya mawimbi ya maunzi 3.3V au 5V (inahitaji urekebishaji wa bodi ya msingi)
Kumbuka:
- Moduli ya FC + ubao msingi inahitajika ili bidhaa hii ifanye kazi. Moduli ya FC au Baseboard yenyewe haitafanya kazi.
Vipimo
Vichakataji na Vitambuzi
- Kichakataji cha FMU: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, kumbukumbu ya 2MB, RAM 1MB
- Kichakataji cha IO: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- Sensorer za ubao
- Accel/Gyro: ADIS16470
- ±40g, Mtetemo Uliotengwa, IMU ya Viwanda
- Accel/Gyro: IIM-42652
- ±16g, Mtetemo Uliotengwa, IMU ya Viwanda
- Accel/Gyro: ICM-45686 yenye Teknolojia ya BalancedGyro™
- ±32g, Imewekwa Ngumu
- Barometer: ICP20100
- Barometer: BMP388
- Mag: BMM150
- Accel/Gyro: ADIS16470
- NXP Kipengee salama cha maunzi cha EdgeLock SE050 Plug & Trust
Data ya umeme
- Ukadiriaji wa Voltage:
- Upeo wa voltage ya pembejeo: 6V
- Uingizaji wa Nishati wa USB: 4.75~5.25V
- Uingizaji wa Reli ya Servo: 0~36V
- Ukadiriaji wa Sasa:
- Kikomo cha sasa cha pato la Telem1: 1.5A
- Kikomo kingine cha sasa cha pato kilichojumuishwa kwenye mlango mwingine wote: 1.5A
- Joto la Kuendesha: -25-85°C
Data ya mitambo
- Vipimo
- Moduli ya Kidhibiti cha Ndege: 38.8 x 31.8 x 30.1mm
- Ubao Msingi wa Kawaida: 52.4 x 102 x 16.7mm (Alumini)
- Ubao Mdogo: 43.4 x 72.8 x 14.2 mm
- Uzito
- Moduli ya Kidhibiti cha Ndege: 50g
- Ubao wa Msingi wa Kawaida: 72.5g (Alumini)
- Ubao mdogo: 26.5g
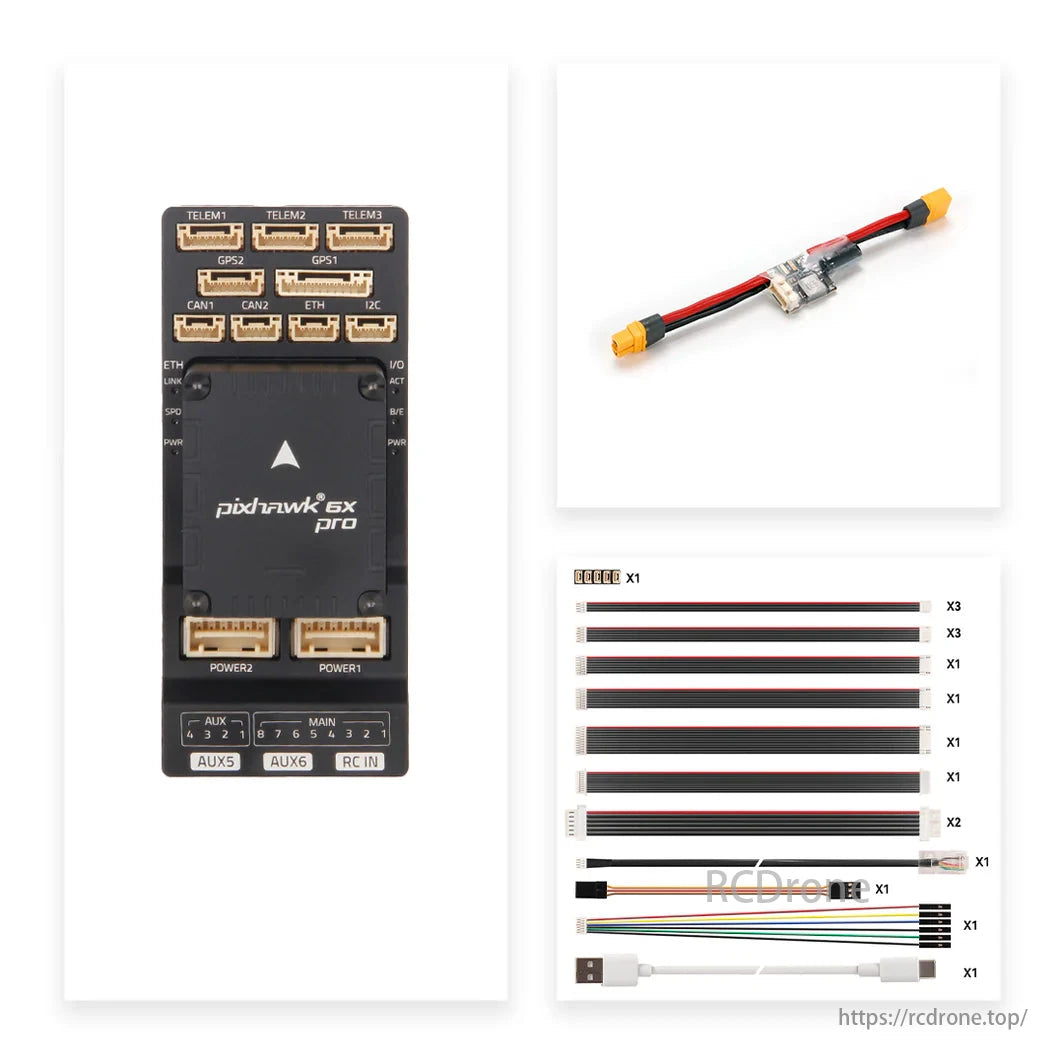
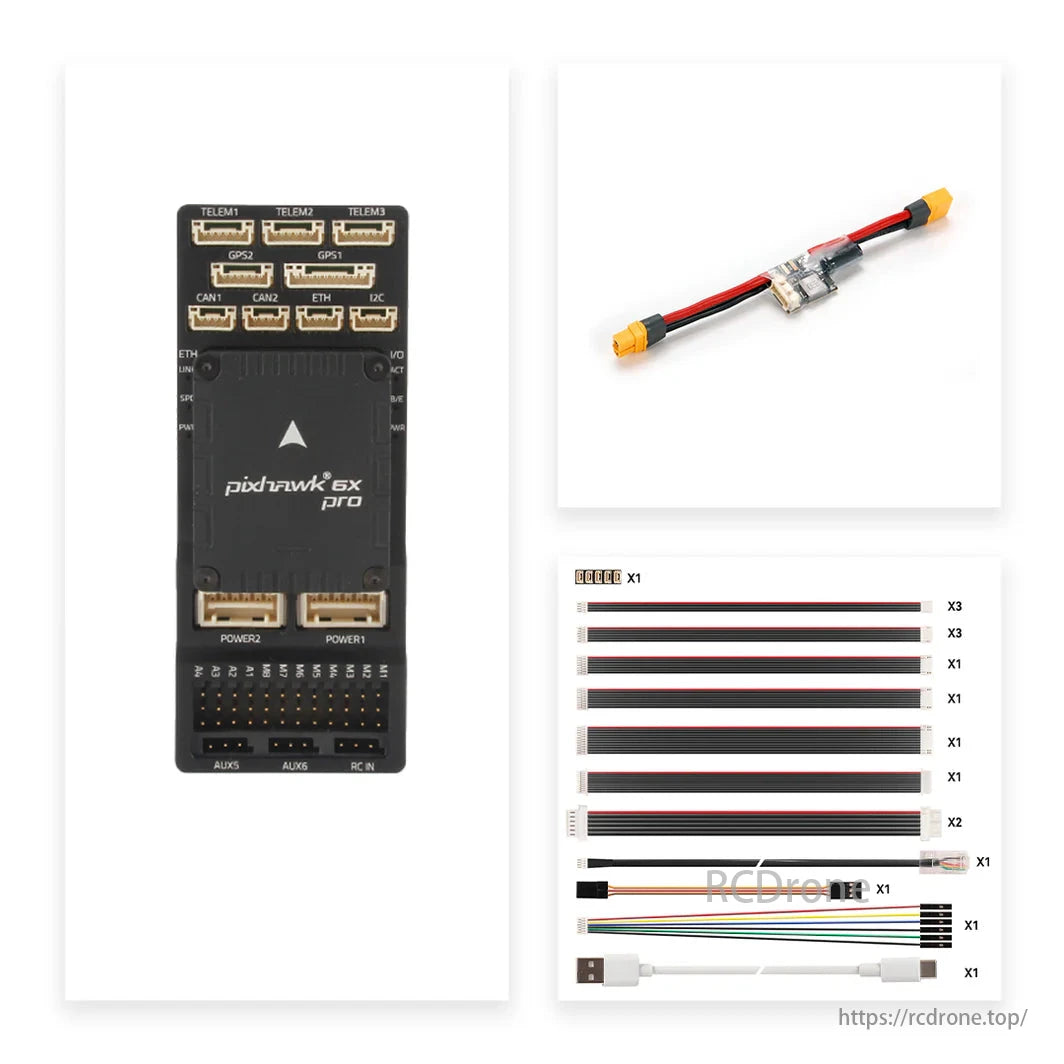
Kifurushi kinajumuisha
Moduli ya FC inajumuisha Pekee:
- Pixhawk Moduli ya Kidhibiti cha Ndege cha 6X Pro
- Ubadilishaji wa Hiari wa Uwekaji Dampo wa IMU (laini kuliko iliyosakinishwa awali)
V2A/V2B/Seti ndogo ya Kawaida inajumuisha:
- Moduli ya Kidhibiti cha Ndege cha Pixhawk 6X Pro
- Pixhawk Standard Baseboard v2A/ Pixhawk Standard Baseboard v2B/ Mini Baseboard
- Moduli ya Nguvu ya PM02D HV
- Seti ya Cable
Maelezo
Muundo mpya wa Kutengwa kwa Mtetemo
Muundo huu mpya wa kutenganisha mtetemo hutumia acnyenzo za kutengwa zenye msingi wa silikoni zilizoundwa na ustom badala ya muundo wa jadi wa povu. BImechangiwa na R&D na majaribio ya kina, inatoa sifa bora za unyevu wa IMU na masafa ya sauti katika wigo wa juu, kamili kwa ndege isiyo na rubani ya viwandani na ya kibiashara.
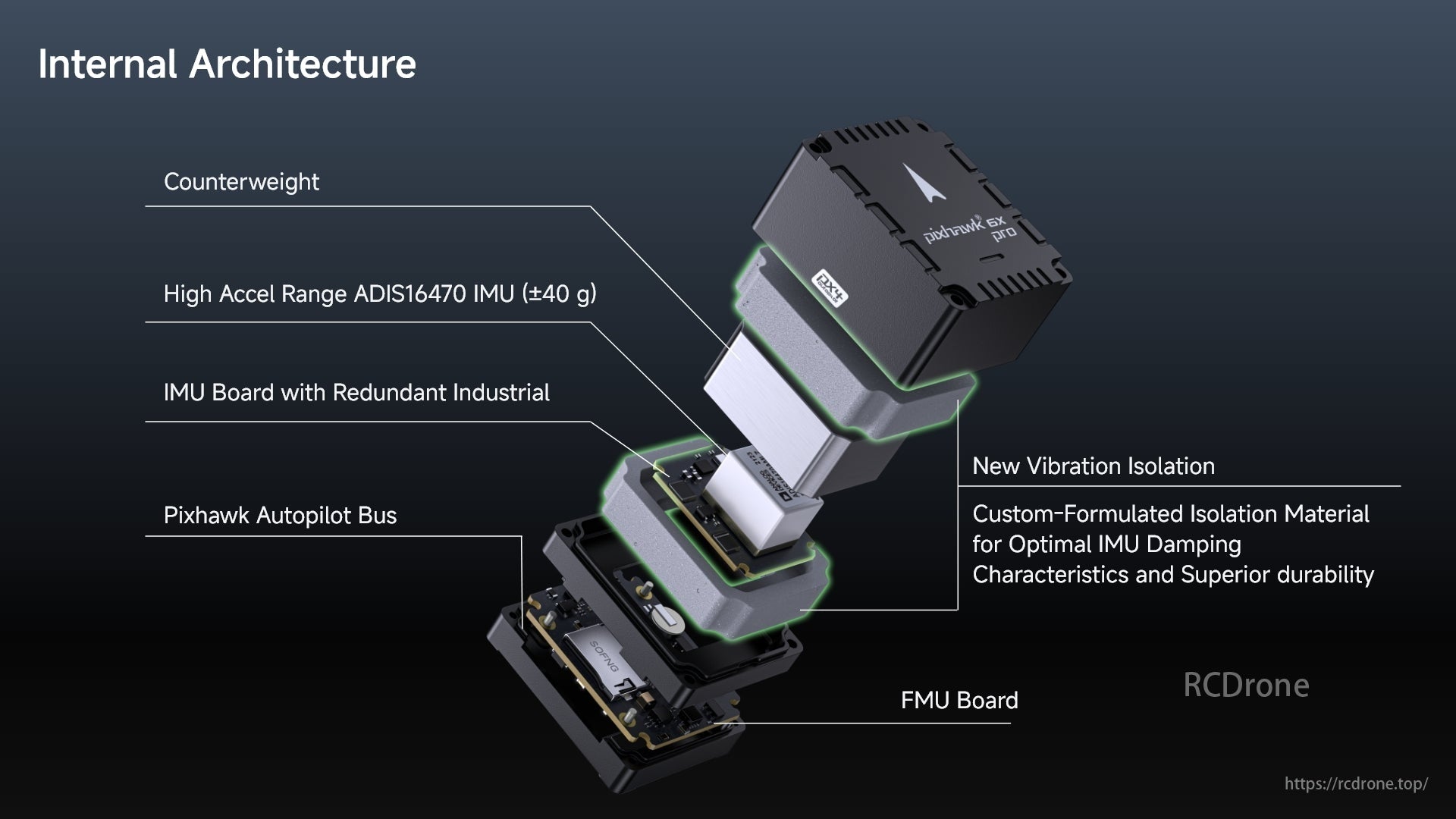
Usanifu wa Ndani: Uzito wa Kukabiliana, Kiwango cha Juu cha Accel ADIS16470 IMU (± 40 g), Bodi ya IMU ya Viwanda Isiyohitajika, Basi la Pixhawk Autopilot, Kutenga Mpya kwa Mtetemo, Bodi ya FMU.
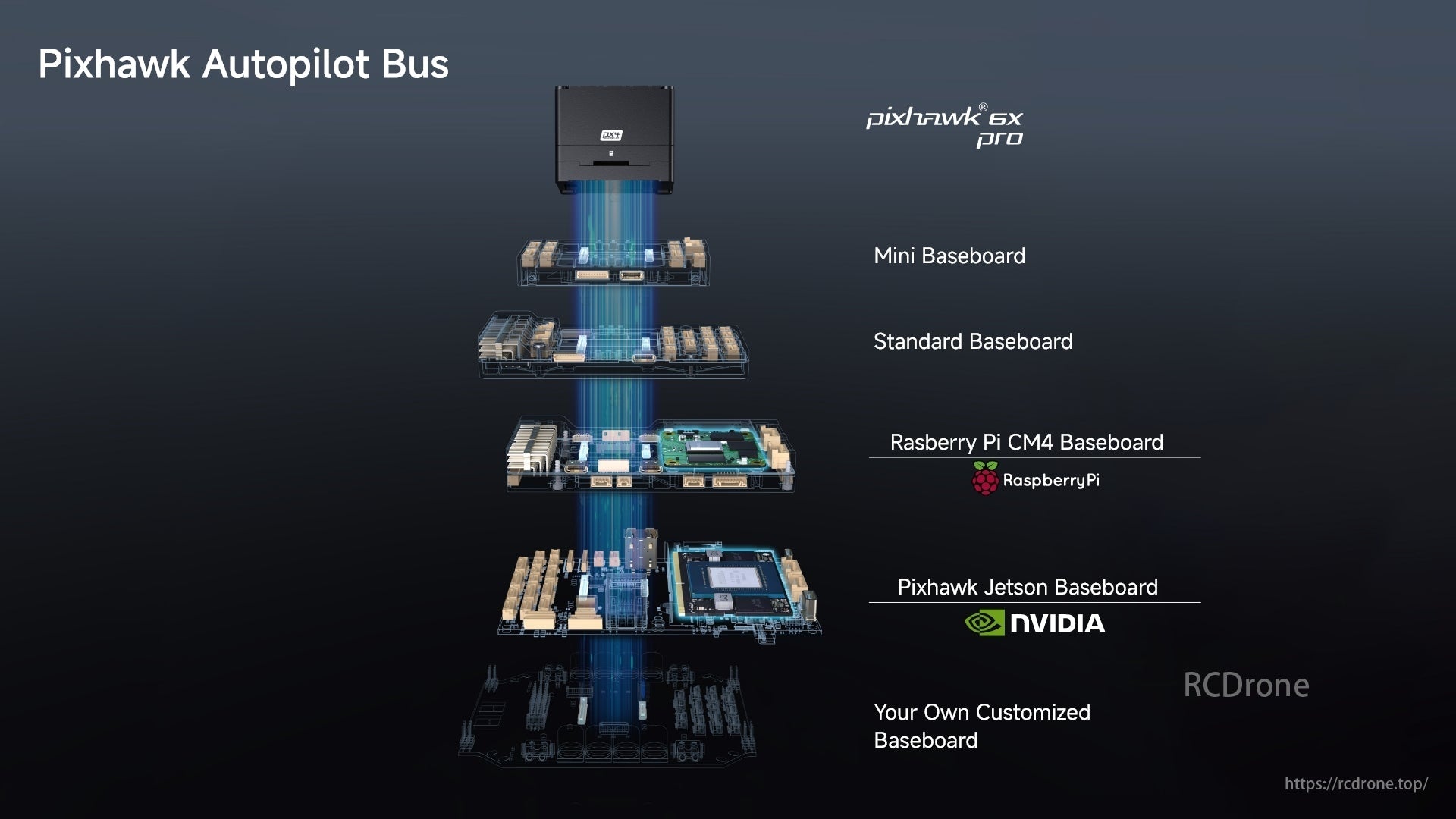
Pixhawk Autopilot Bus huunganisha Mini, Standard, Raspberry Pi CM4, Jetson Baseboards na bao maalum.
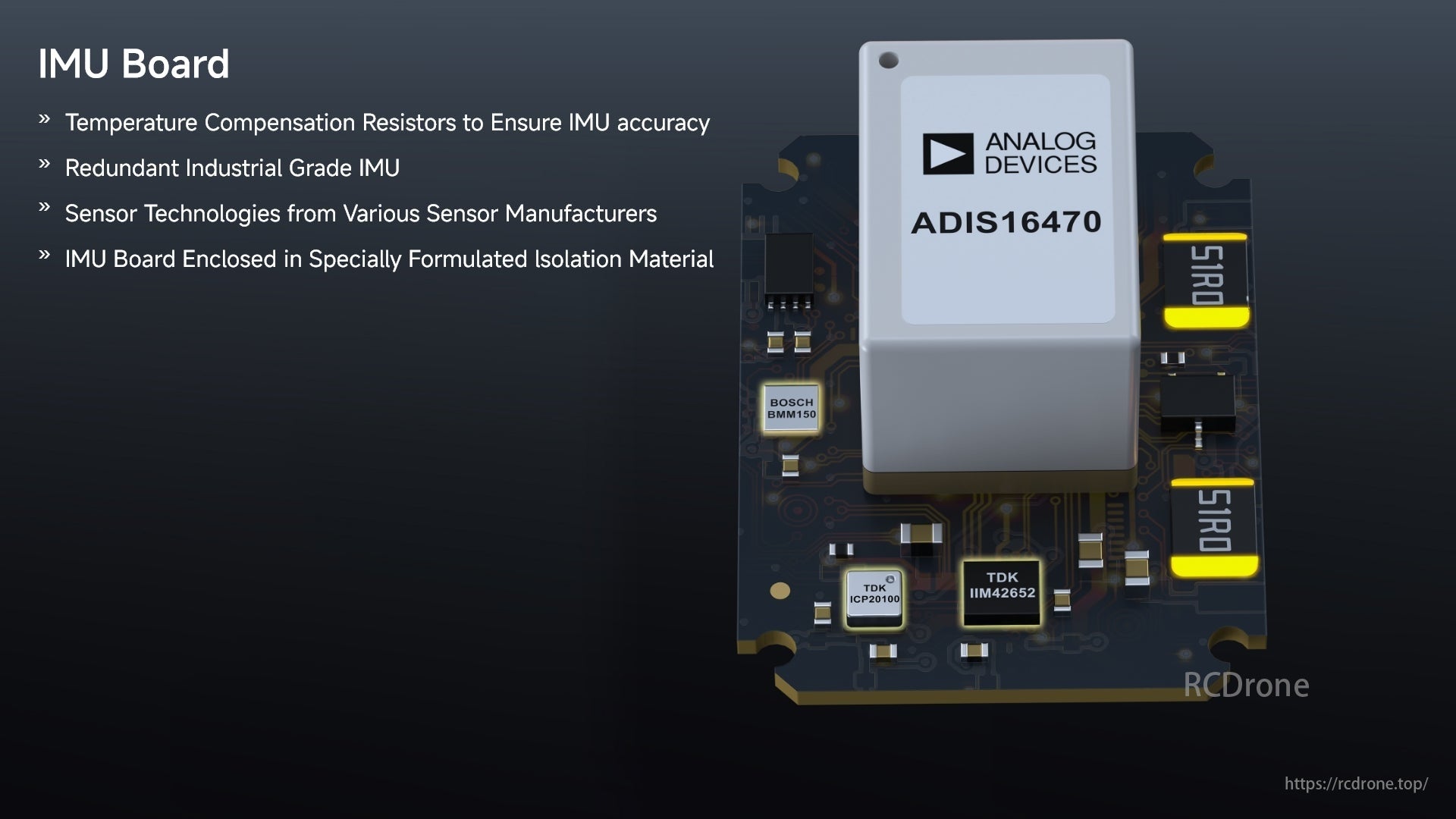
Bodi ya IMU huangazia vipingamizi vya kufidia halijoto, IMU ya hali ya juu isiyohitajika, vitambuzi kutoka kwa watengenezaji mbalimbali, na imefungwa katika nyenzo za kutengwa.
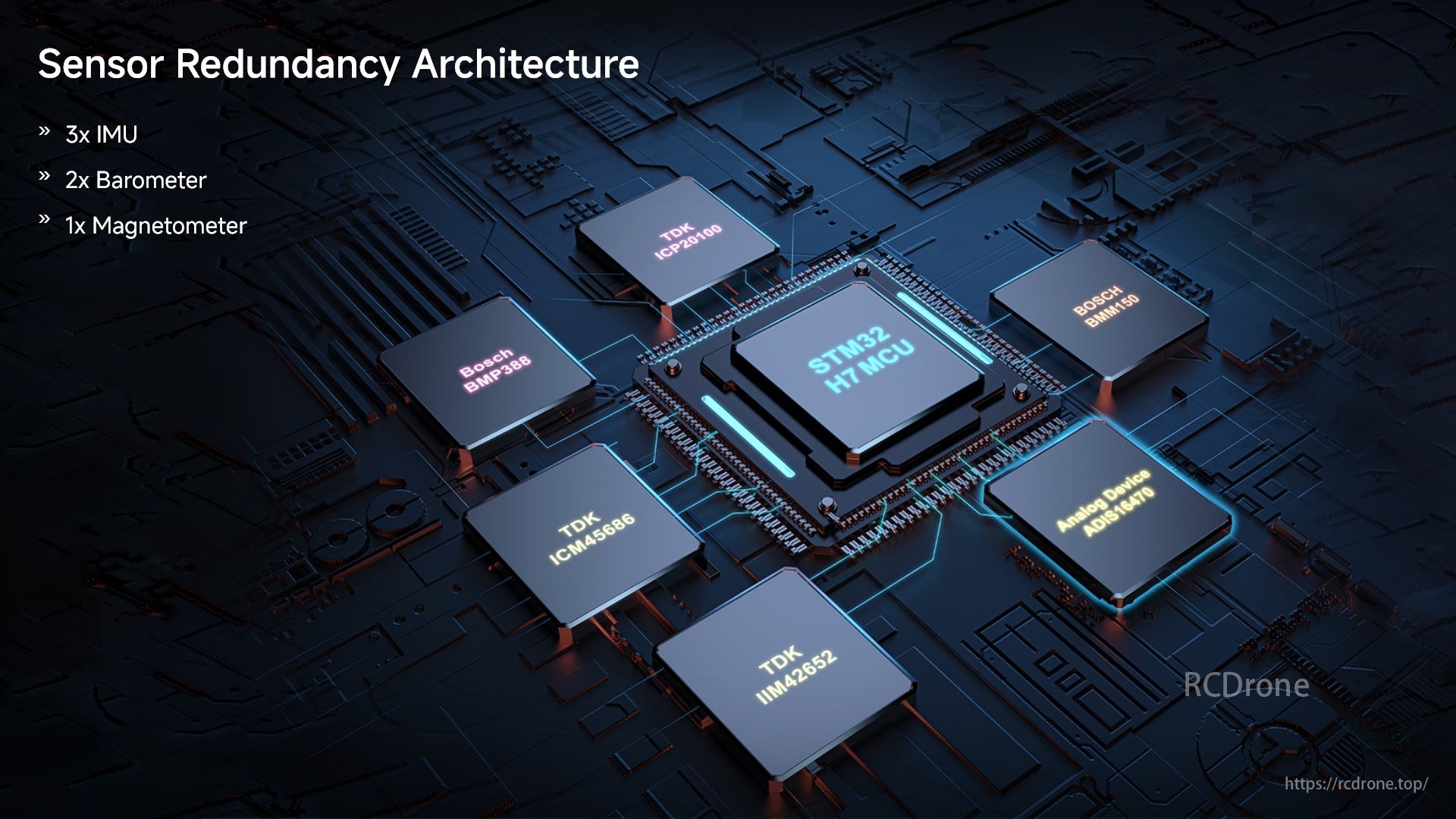
Usanifu wa Upungufu wa Kihisi unajumuisha 3x IMU, 2x Barometer, na 1x Magnetometer, inayoangazia vipengele kama vile STM32 H7 MCU, TDK ICs, Bosch BMP388, na Vifaa vya Analogi ADIS16470.
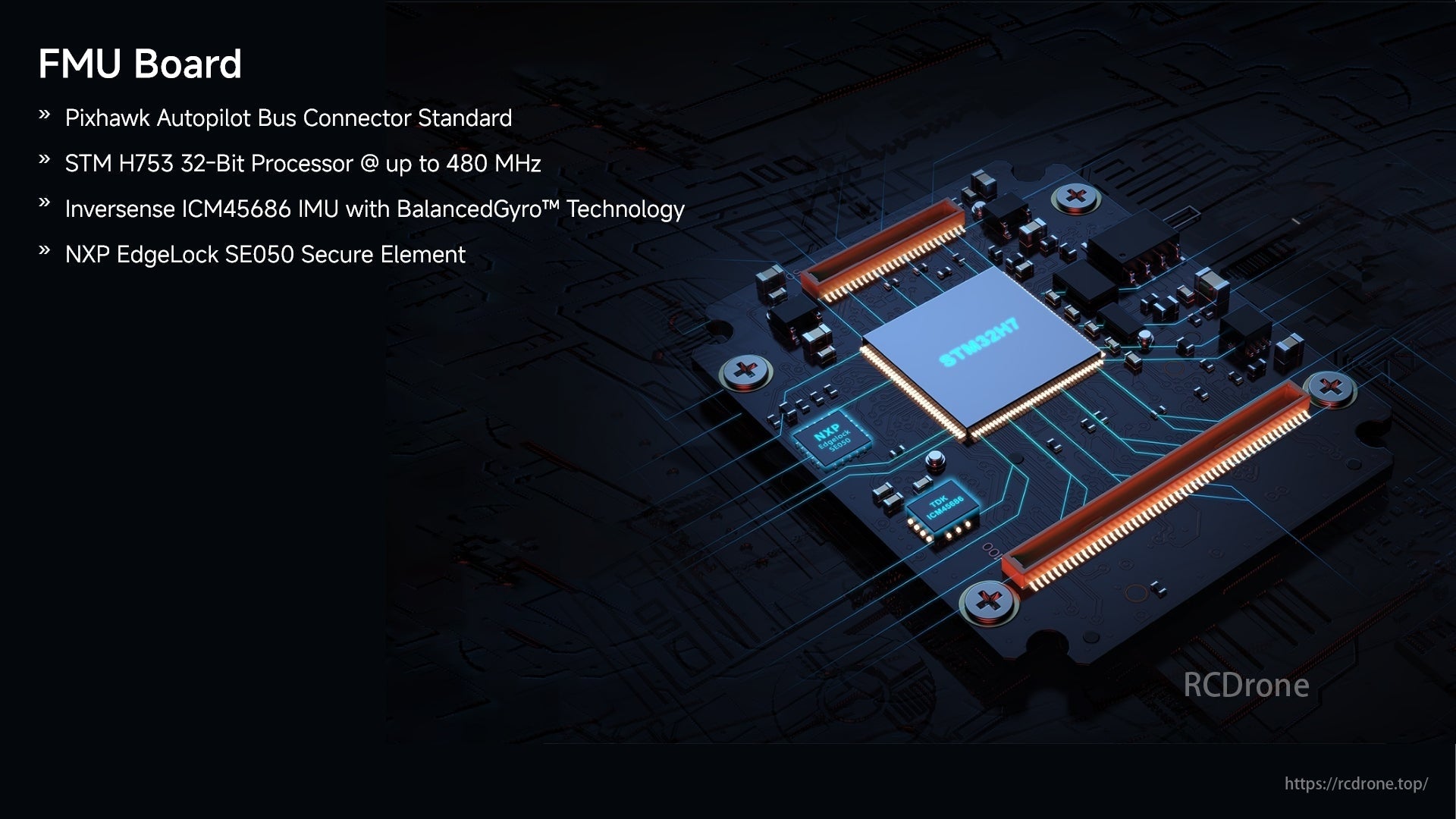
Bodi ya FMU ina Kiunganishi cha Kawaida cha Pixhawk Autopilot Bus, STM H753 32-Bit Processor hadi 480 MHz, Inversense ICM45686 IMU yenye Teknolojia ya BalancedGyro, na NXP EdgeLock SE050 Secure Element.
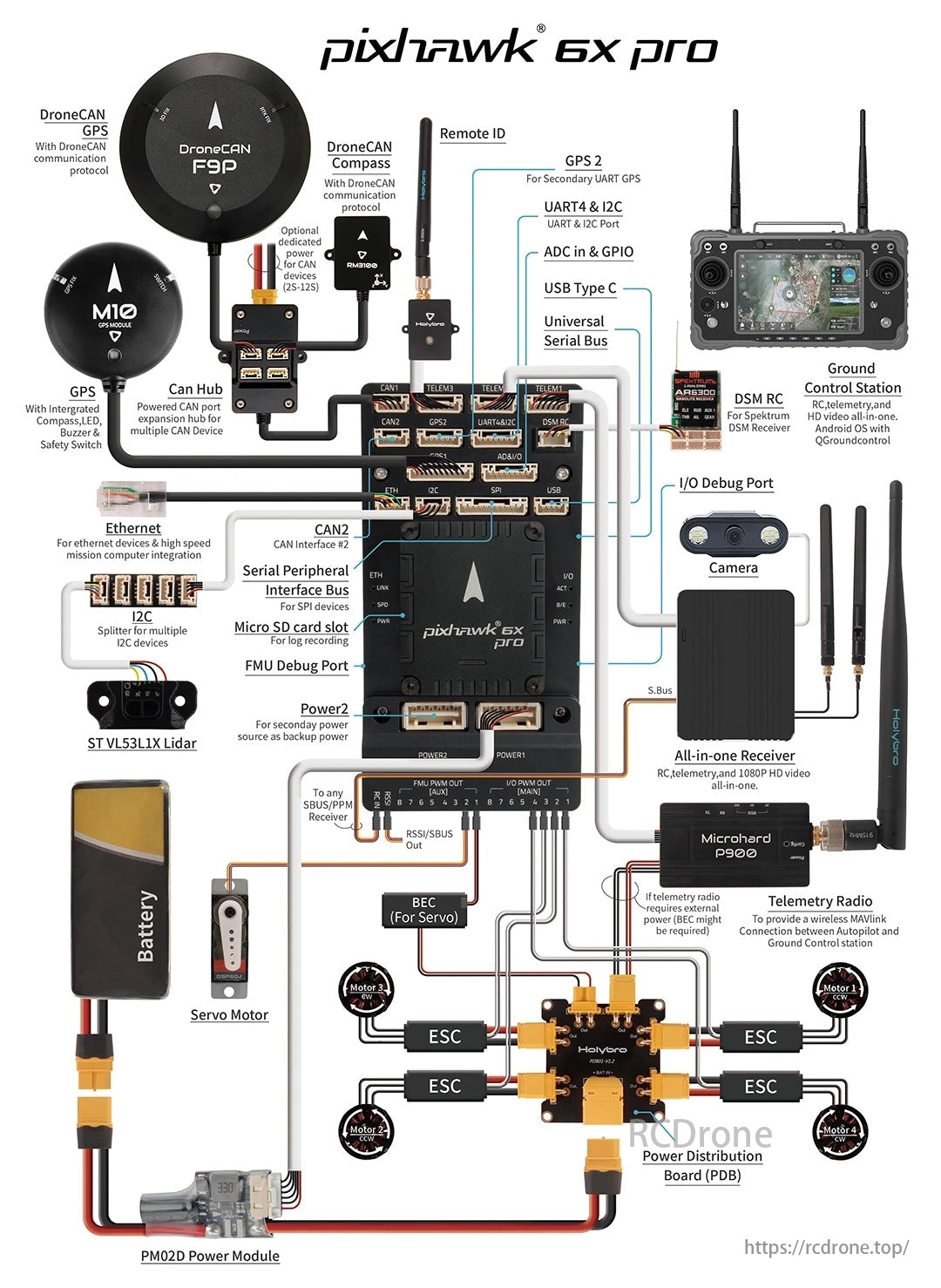
Mchoro wa Pixhawk 6X Pro unaonyesha miunganisho ya mfumo wa otomatiki wa drone, ikijumuisha moduli za GPS, dira, kituo cha udhibiti wa ardhini, kamera, redio ya telemetry, ESC, injini na bodi ya usambazaji wa nishati. Miingiliano mbalimbali kama CAN, I2C, UART, na USB hutumiwa kwa mawasiliano kati ya vijenzi.
Related Collections