Holybro Pixhawk 6X-RT - (Toleo la Wasanidi Programu) Kidhibiti Kiotomatiki cha Ndege Kawaida/Seti Ndogo
Holybro Pixhawk 6X-RT - (Toleo la Wasanidi Programu) Kidhibiti Kiotomatiki cha Ndege Kawaida/Seti Ndogo
HolyBro
Couldn't load pickup availability
Muhtasari
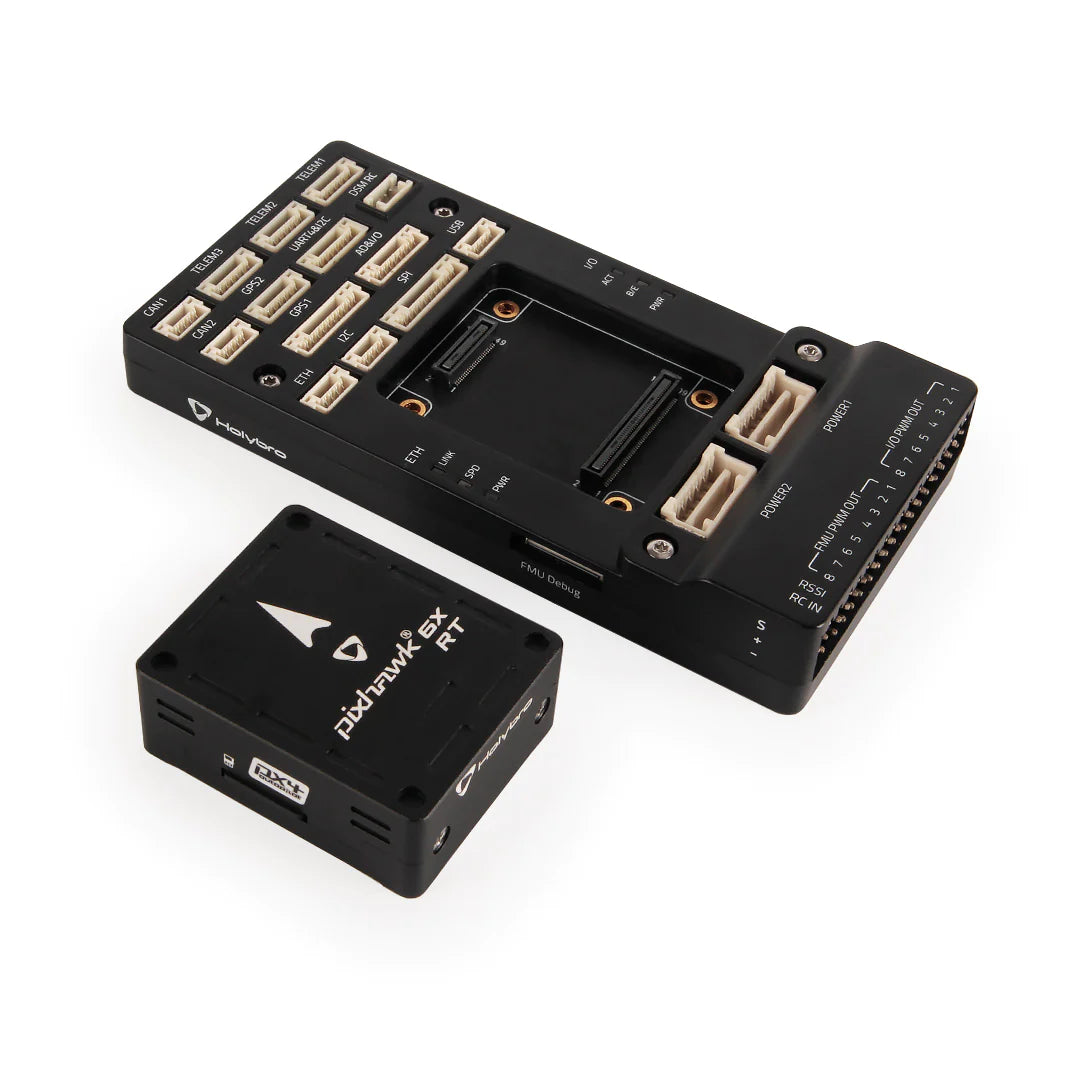
Pixhawk 6X-RT inategemea Kiwango cha Wazi cha Pixhawk® FMUv6X-RT na Kiwango cha Basi cha Pixhawk® Autopilot. Inakuja na PX4 Autopilot® iliyosakinishwa awali. Ndani ya kidhibiti cha ndege cha Pixhawk 6X-RT, unaweza kupata NXP-msingi i.MXRT1176 MCU, iliyooanishwa na teknolojia ya vitambuzi kutoka Bosch® na InvenSense®, kukupa wepesi na kutegemewa kudhibiti gari lolote linalojiendesha.
I.Kidhibiti kidogo cha MXRT1176 kina Arm® Cortex-M7 kwa GHz 1 na Cortex-M4 kwa 400 MHz. Ina 2MB SRAM na 64MB Octal SPI Flash. Shukrani kwa nguvu iliyosasishwa ya uchakataji, wasanidi wanaweza kuwa na tija na ufanisi zaidi kwa kazi yao ya ukuzaji, ikiruhusu algoriti na miundo changamano.
Inajumuisha IMU za utendaji wa juu, zenye kelele ya chini zilizoundwa kwa uimarishaji bora, na ina IMU tatu zisizo na kipimo na vipimo viwili visivyo na kipimo kwenye mabasi tofauti. Pilot Otomatiki inapogundua hitilafu ya kihisi, mfumo hubadilika kwa urahisi hadi mwingine ili kudumisha kutegemewa kwa udhibiti wa safari. LDO huru huwezesha kila seti ya sensorer yenye udhibiti huru wa nguvu. Mfumo wa kutenganisha mtetemo ili kuchuja mtetemo wa masafa ya juu na kupunguza kelele ili kuhakikisha usomaji sahihi, kuruhusu magari kufikia utendakazi bora wa jumla wa ndege. Microchip Ethernet PHY iliyojumuishwa, mawasiliano ya kasi ya juu na kompyuta za misheni kupitia Ethaneti sasa yanawezekana.
The Pixhawk 6X-RT ni kamili kwa wasanidi programu katika maabara za utafiti wa mashirika, wanaoanzisha, wasomi (utafiti, maprofesa, wanafunzi) na matumizi ya kibiashara. Kidhibiti hiki cha Ndege kinaoana na ubao wowote wa msingi unaotumia basi la Pixhawk Autopilot, kama vile Pixhawk Baseboard, Pixhawk Mini Baseboard, na Pixhawk RPi CM4 Baseboard.
Alama Muhimu za Usanifu
- Utendaji wa juu dual core i.Kichakataji cha MXRT1176 chenye Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- Kidhibiti cha kawaida cha ndege: IMU, FMU na mfumo wa Base uliotenganishwa uliounganishwa kwa pini 100 na kiunganishi cha Basi cha Pixhawk® cha Pixhawk® Autopilot cha pini 50.
- Uhitaji: vitambuzi 3x vya IMU na vihisi 2x vya Barometer kwenye mabasi tofauti
- Vikoa vya upunguzaji mara tatu: Vikoa vya vitambuzi vilivyotengwa kabisa na mabasi tofauti na udhibiti tofauti wa nishati
- Mfumo wa kutenganisha mtetemo ili kuchuja mtetemo wa masafa ya juu na kupunguza kelele ili kuhakikisha usomaji sahihi
- Kiolesura cha Ethaneti cha muunganisho wa kompyuta wa misheni ya kasi ya juu
- IMUs hudhibitiwa na halijoto kwa vidhibiti vya kupokanzwa vilivyo kwenye bodi, hivyo kuruhusu halijoto ya juu kabisa ya kufanya kazi ya IMUs
- Kipengee salama cha maunzi NXP EdgeLock SE051 kiendelezi kwa kipengele kinachoaminika na watu wengi EdgeLock SE050 Plug & Trust familia ya kipengele salama, inasaidia masasisho ya programu tumizi kwenye uga na kuwasilisha usalama uliothibitishwa umeidhinishwa kwa CC EAL 6+, kwa kutumia AVA_VAN.5 hadi kiwango cha Mfumo wa Uendeshaji, kwa ulinzi mkali dhidi ya matukio ya hivi karibuni ya mashambulizi. Eg ili kuhifadhi kitambulisho cha opereta kwa usalama
Kumbuka:
- Toleo hili la wasanidi programu kwa watumiaji wa mapema huku tukiendelea kukusanya saa za majaribio ya safari za ndege
- Kidhibiti hiki cha Ndege kwa sasa kinaweza kutumika katika Rafu ya Ndege ya PX4 pekee. (Lengo la Firmware: FMUv6xrt). Haitumiki katika Ardupilot.
- Kidhibiti hiki cha Ndege kinatumia sehemu ya nishati ya dijitali (sawa na Pixhawk 6X, orodha kamili inaweza kupatikana hapa) Chati ya ulinganishaji wa moduli ya Nguvu
Maelezo
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
MB 64Octal SPI Flash
-
Kichakataji cha IO: STM32F103
-
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
Vihisi vya ubao
-
Accel/Gyro: BMI088
-
Accel/Gyro: ICM-42670-P
-
Accel/Gyro: ICM-42686-P
-
Mag: BMM150
-
Kipima kipimo: 2x BMP388
- Kipengele salama cha maunzi
- NXP EdgeLock SE051C2
- Kiolesura cha SDHC
- 12-Channel PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethaneti
- USB
- Uwezeshaji wa Programu ya Chanzo huria
- PX4 Otomatiki
- NuttX RTOS
- Zephyr RTOS
SKU20257 Seti Ya Kawaida/ Seti Ndogo ya SKU258 Inajumuisha:
-
Moduli ya Kidhibiti cha Ndege cha Pixhawk 6X-RT
-
Pixhawk Standard Base/Pixhawk Mini Base
- PM02D HV Power Moduli
-
Seti ya Kebo
Kiungo cha marejeleo:
- Maelekezo ya Kumweka kwa Firmware (Github)
- PX4 kwenye NXP IMXRT1176 1 GHz MCU - Slaidi za uwasilishaji na NXP
- i.MX RT1176 – ukurasa wa bidhaa 1 GHz Crossover MCU na Arm® Cortex® Cores
- EdgeLock® SE051: Suluhisho la Usalama la IoT Lililothibitishwa, Rahisi Kutumia na Usaidizi wa Usasishaji na Applets Maalum
Related Collections