Holybro Pixhawk Jetson Baseboard Bundle Yenye 6X / 6X Pro na NVIDIA Jetson
Holybro Pixhawk Jetson Baseboard Bundle Yenye 6X / 6X Pro na NVIDIA Jetson
HolyBro
Couldn't load pickup availability
Muhtasari
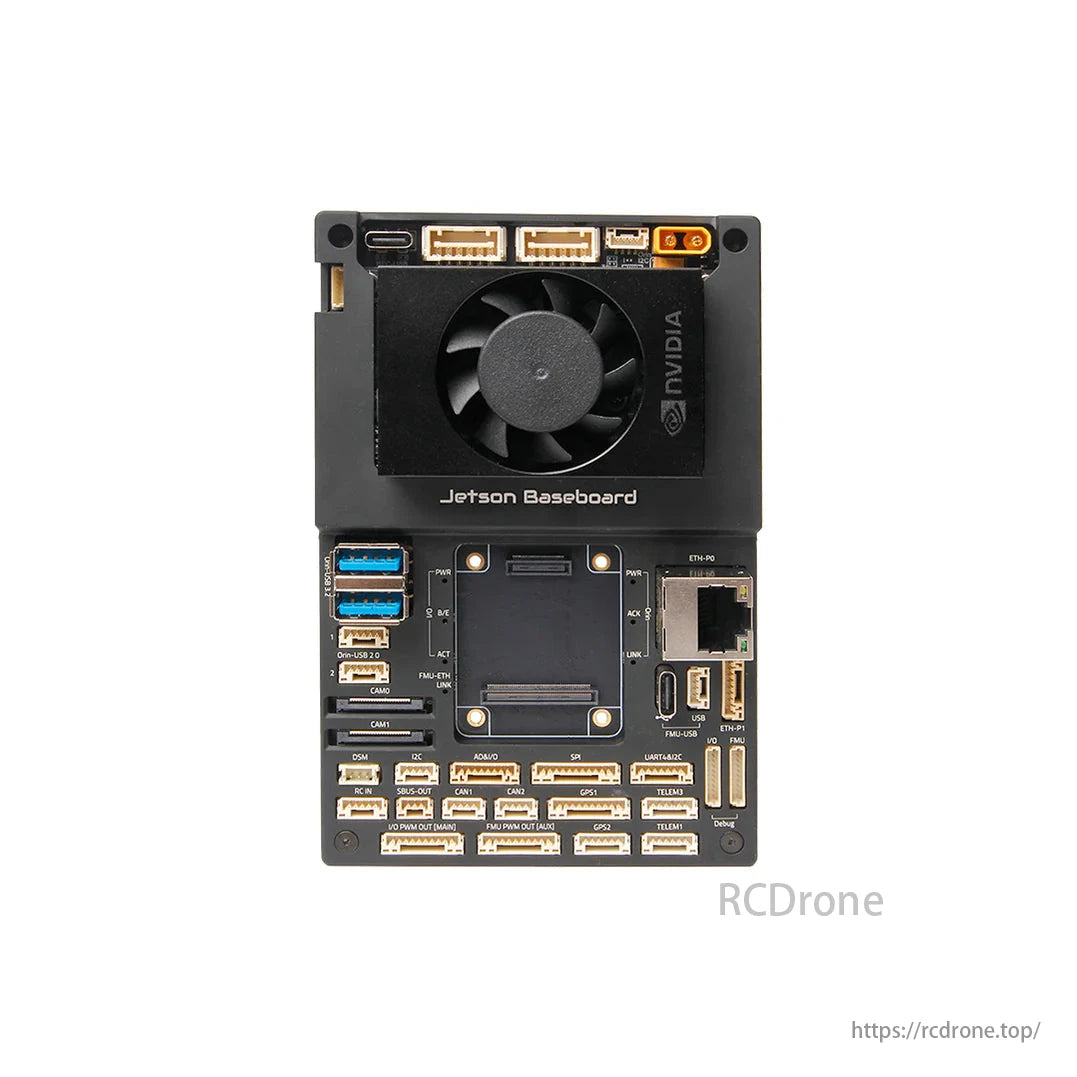
The Holybro Pixhawk Jetson Baseboard imeundwa kwa kuzingatia Vibainishi vya chanzo huria cha Pixhawk Autopilot Bus (PAB). na inaunganishwa bila mshono na NVIDIA Jetson Orin NX/Nano Carrier Board. The Kipengele cha Fomu ya PAB inaruhusu uoanifu na kidhibiti chochote cha ndege cha PAB, ikijumuisha Pixhawk 6X. Bodi hii inachanganya nguvu ya hesabu ya NVIDIA Jetson na uwezo wa kudhibiti ndege wa Pixhawk, na kuifanya kuwa bora kwa programu za juu za uhuru.
Sifa Muhimu
-
Mfumo wa Umoja: Inachanganya Pixhawk na NVIDIA Jetson katika bodi moja.
-
Muunganisho Usio na Mifumo: Jetson na Pixhawk wanawasiliana kupitia UART, CAN, na swichi ya Ethaneti.
-
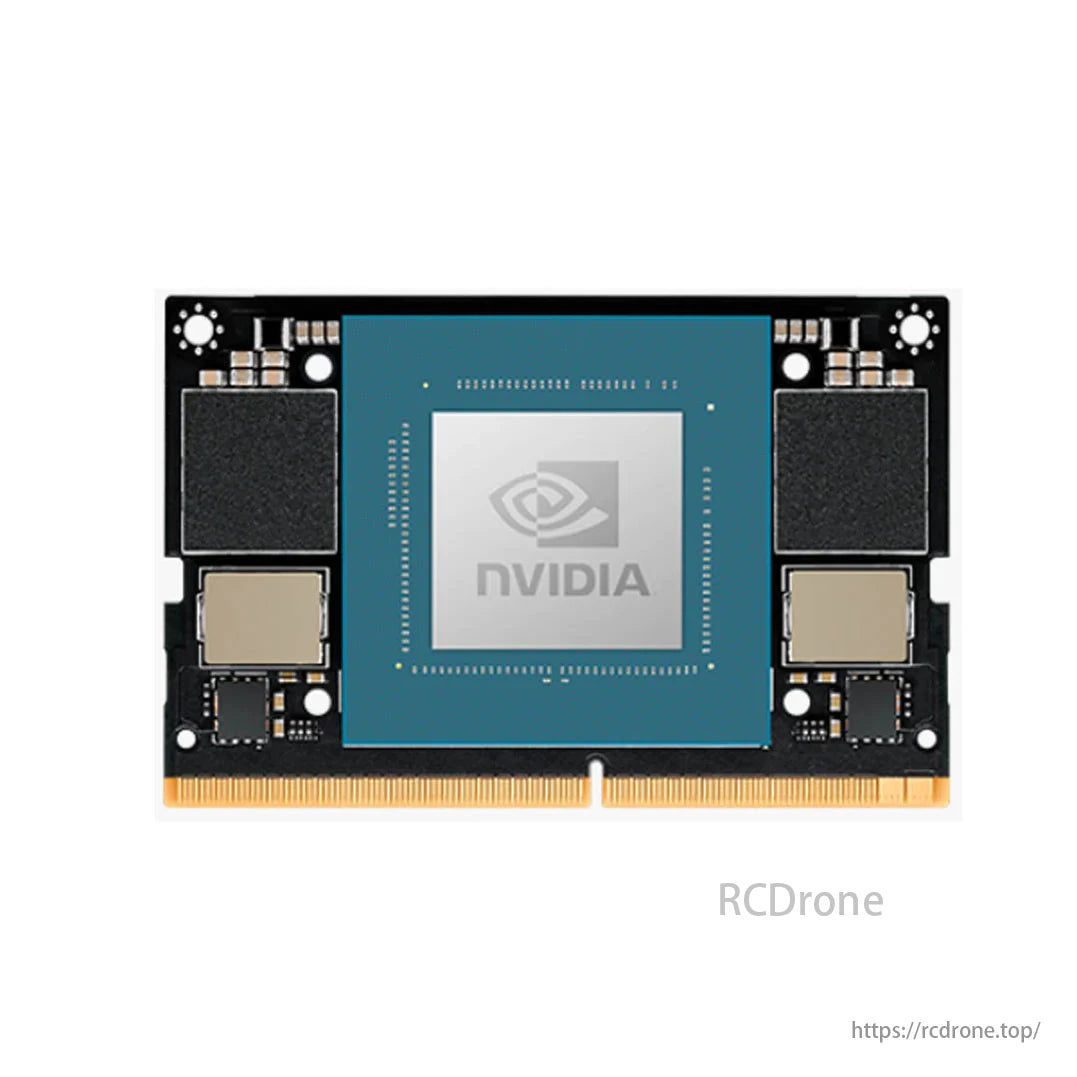
Utangamano mpana: Inasaidia Jetson Orin NX na Orin Nano.
-
Upanuzi wa Kasi ya Juu: Vipengele 2x M.2 nafasi muhimu kwa WiFi/Bluetooth na NVMe SSD.
-
Muunganisho wa Pixhawk 6X: Vifaa na Sensorer za ICM-45686 kwa udhibiti bora wa ndege.
Vichakataji na Vitambuzi
Kichakataji cha FMU:
-
STM32H753
-
32-bit ARM Cortex-M7, 480MHz
-
Kumbukumbu ya Flash 2MB, RAM 1MB
Kichakataji cha IO:
-
STM32F103
-
32-bit ARM Cortex-M3, 72MHz
-
64 KB SRAM
Sensorer za Onboard (Rev8)
-
Kipima kasi/Gyro: 3x ICM-45686 (pamoja na BalancedGyro™ Technology)
-
Barometer: ICP20100 & BMP388
-
Magnetometer: BMM150
Bandari za Ubao na Muunganisho
Viunganishi vya Jetson
-
2x Gigabit Ethernet Bandari (Imeunganishwa kwa Jetson & Autopilot kupitia RTL8367S Ethernet kubadili)
-
2x Ingizo za Kamera ya MIPI CSI (Njia 4 kila moja, 22-Pini Raspberry Pi Cam FFC)
-
2x USB 3.0 Bandari Pashi (USB-A, kikomo cha sasa cha 5A)
-
2 x USB 2.0 Bandari mwenyeji (5-Pini JST-GH)
-
USB 2.0 kwa Utatuzi (USB-C)
-
Pato la HDMI Ndogo
-
Nafasi 2x M.2:
-
Ufunguo M (2242) wa NVMe SSD (PCIEx4)
-
Ufunguo E (2230) wa WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
CAN Port (Imeunganishwa na Otomatiki CAN2, 4-Pini JST-GH)
-
SPI, I2C, I2S, Bandari za UART (Viunganishi mbalimbali vya JST-GH)
-
Bandari ya Nguvu ya Mashabiki
-
Ingizo la Nguvu: Kiunganishi cha XT30, 7-21V (3S-4S)
-
UBEC 12A (3-14S) Imependekezwa kwa >programu za 4S
Viunganishi vya otomatiki
-
Kiolesura cha Basi cha Pixhawk Autopilot: Pini 100 & Pini 50 Hirose DF40
-
Ingizo Zisizohitajika za Moduli ya Nguvu ya Dijiti
-
I2C Power Monitor Support
-
GPS & Bandari za Kubadili Usalama: 10-Pini & 6-Pin JST-GH
-
2x Bandari za CAN (Pini 4 JST-GH)
-
Bandari 3 za Telemetry (JST-GH, moja iliyounganishwa na UART1 ya Jetson)
-
Matokeo 16 ya PWM (2x 10-Pin JST-GH)
-
USB 2.0 (USB-C & 4-Pin JST-GH)
-
Ingizo la DSM (Pini-3 JST-ZH, Lamu ya milimita 1.5)
-
Uingizaji wa RC (PPM/SBUS, Pini 5 JST-GH)
-
Mlango wa SPI kwa Basi la Kihisi cha Nje (SPI5, 11-Pin JST-GH)
-
Lango 2x za Utatuzi (FMU & IO, 10-Pin JST-SH)
Mahitaji ya Nguvu
-
Nguvu ya Kuingiza: 7-21V (3S-4S) kupitia Kiunganishi cha XT30
-
Kima cha chini cha Mahitaji ya Nguvu: 8V/3A (hutofautiana kulingana na vifaa vya pembeni)
-
Inaauni UBEC 12A ya Nje (3-14S) kwa matumizi ya ziada na ya juu ya voltage
-
Ulinzi wa Kupindukia Uliojengwa ndani
Vipimo & Uzito
-
Ukubwa wa Bodi: 126 x 80 x 38mm (bila Jetson & Kidhibiti cha Ndege)
-
Uzito: 203.2g (Ikijumuisha Jetson, Heatsink, Kidhibiti cha Ndege, SSD, Moduli ya Wi-Fi)
Vipimo vya UBEC-12A
-
Nguvu ya Kuingiza: 3~14S (XT30)
-
Voltage ya Pato: 6.0V/7.2V/8.0V/9.2V (7.2V inayopendekezwa kwa Jetson)
-
Utoaji Unaoendelea wa Sasa: 12A
-
Pato la Sasa hivi: 24A
-
Ukubwa: 48 x 33.6 x 16.3mm
-
Uzito: 47.8g
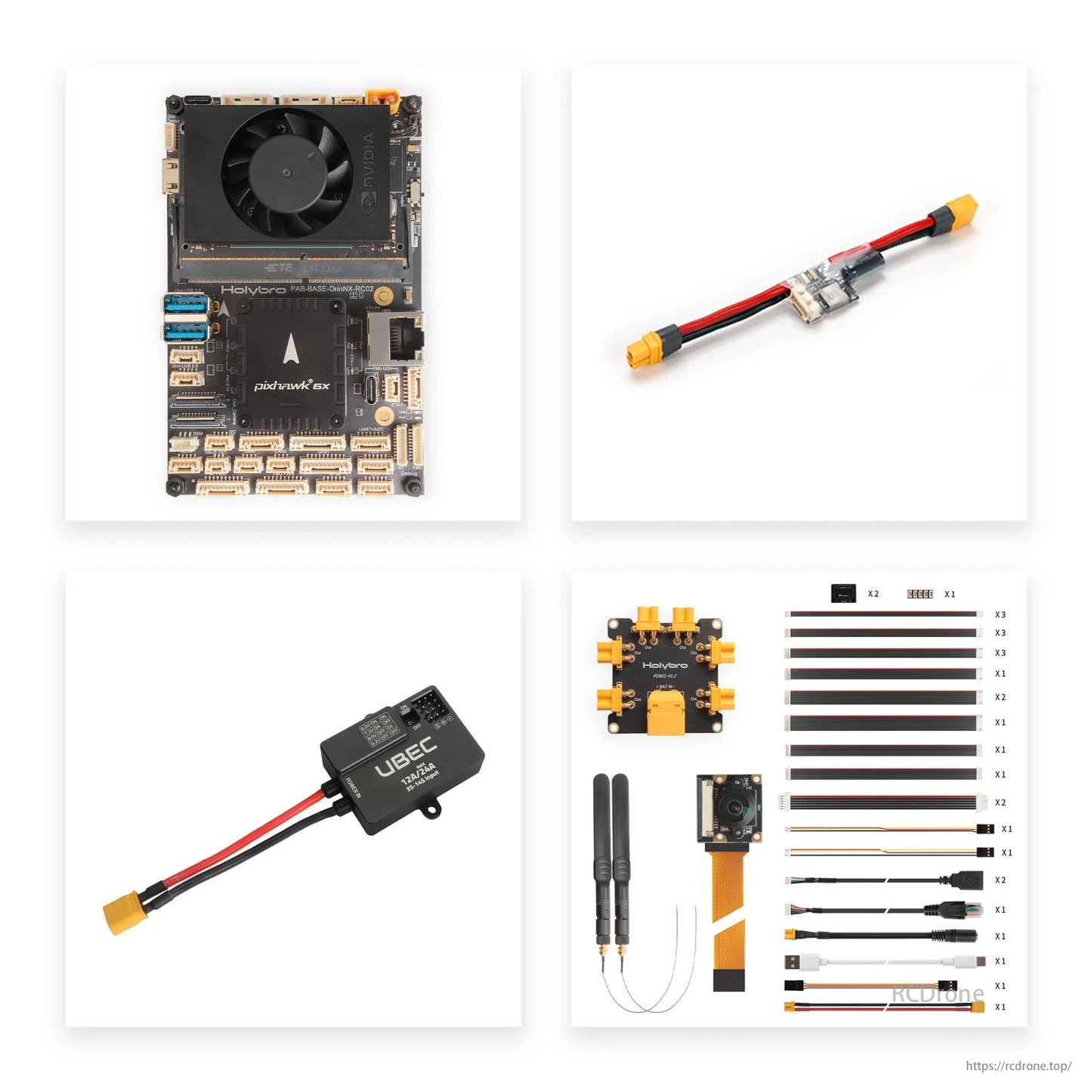
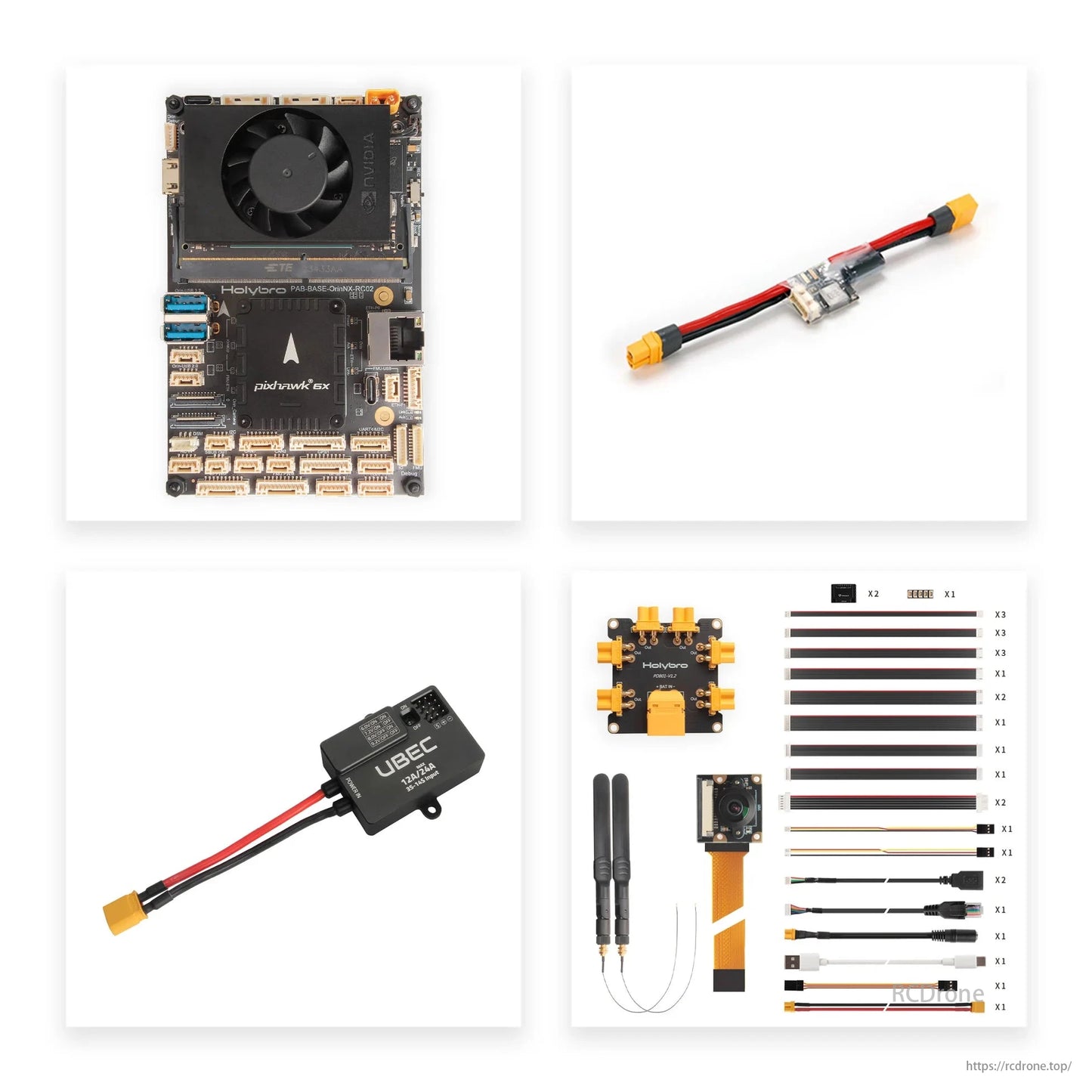
Yaliyomo kwenye Kifurushi
Pixhawk 6X Bundle
-
Moduli ya Kidhibiti cha Ndege cha Pixhawk 6X (ICM-45686).
-
Ubao wa msingi wa Pixhawk Jetson Orin
-
Nvidia Orin NX (RAM 16GB) / Orin Nano (RAM 4GB) pamoja na Heatsink & Shabiki
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
-
Wi-Fi na Moduli ya Bluetooth: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Kamera: IMX219-200
-
Moduli ya Nguvu ya PM02D
-
UBEC 12A (3-14S)
-
Bodi ya PDB & Seti ya Kebo
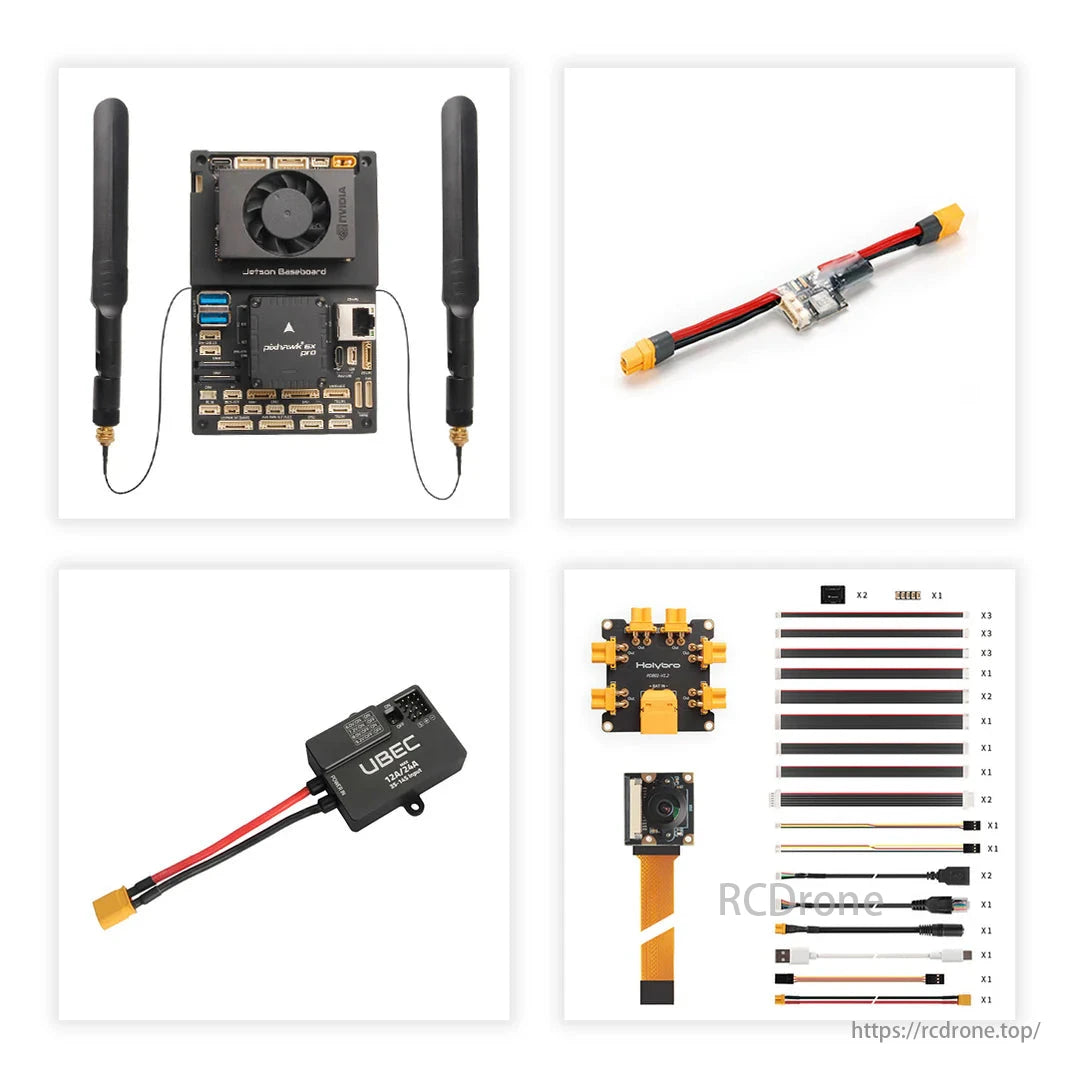
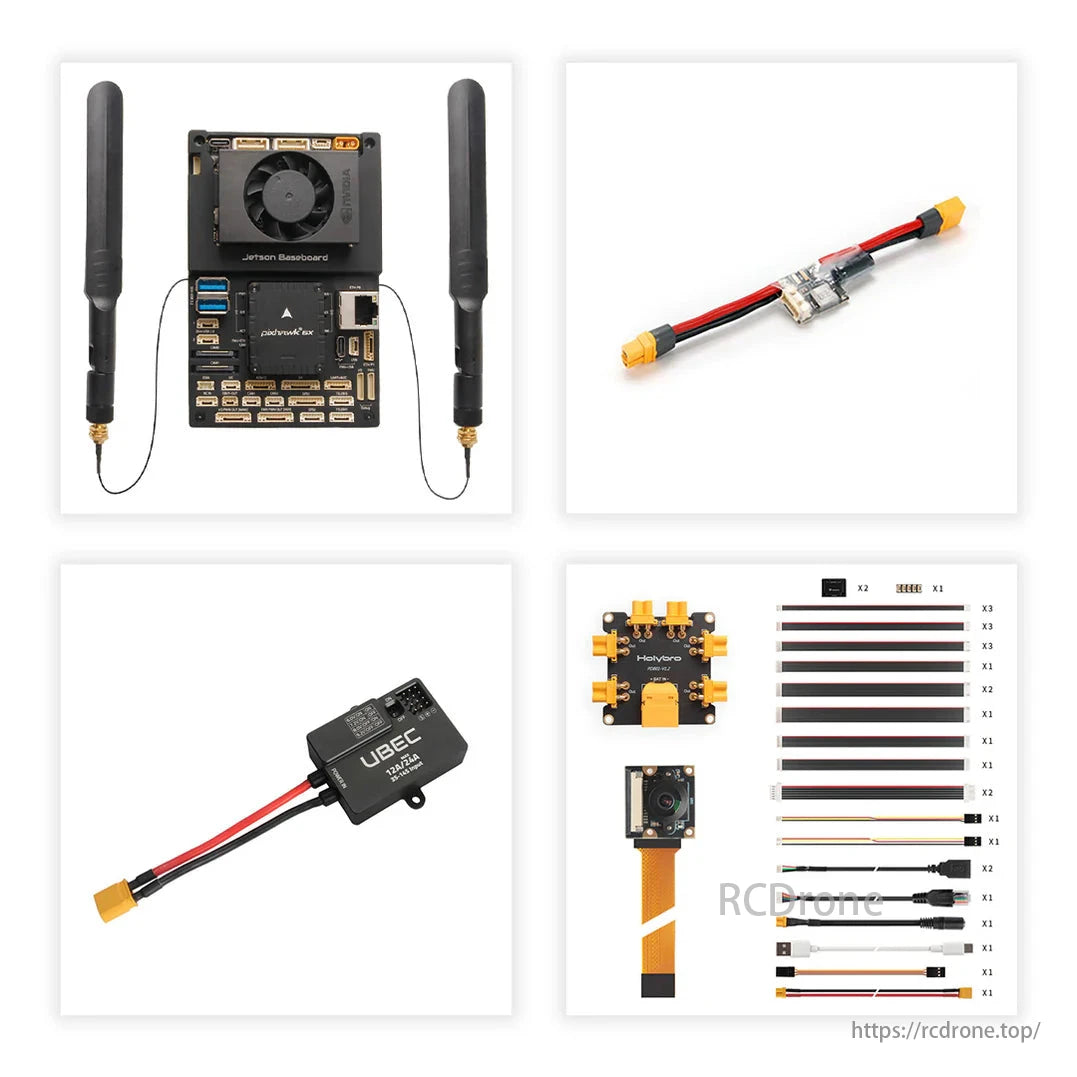
Pixhawk 6X Pro Bundle
-
Moduli ya Kidhibiti cha Ndege cha Pixhawk 6X Pro
-
Ubao wa msingi wa Pixhawk Jetson Orin (Kesi ya w/ au w/o)
-
Nvidia Orin NX (RAM 16GB) / Orin Nano (RAM 4GB) pamoja na Heatsink & Shabiki
-
SSD, Wi-Fi/Bluetooth Moduli, Kamera, PM02D Power Moduli, UBEC 12A, Bodi ya PDB, Seti ya Kebo
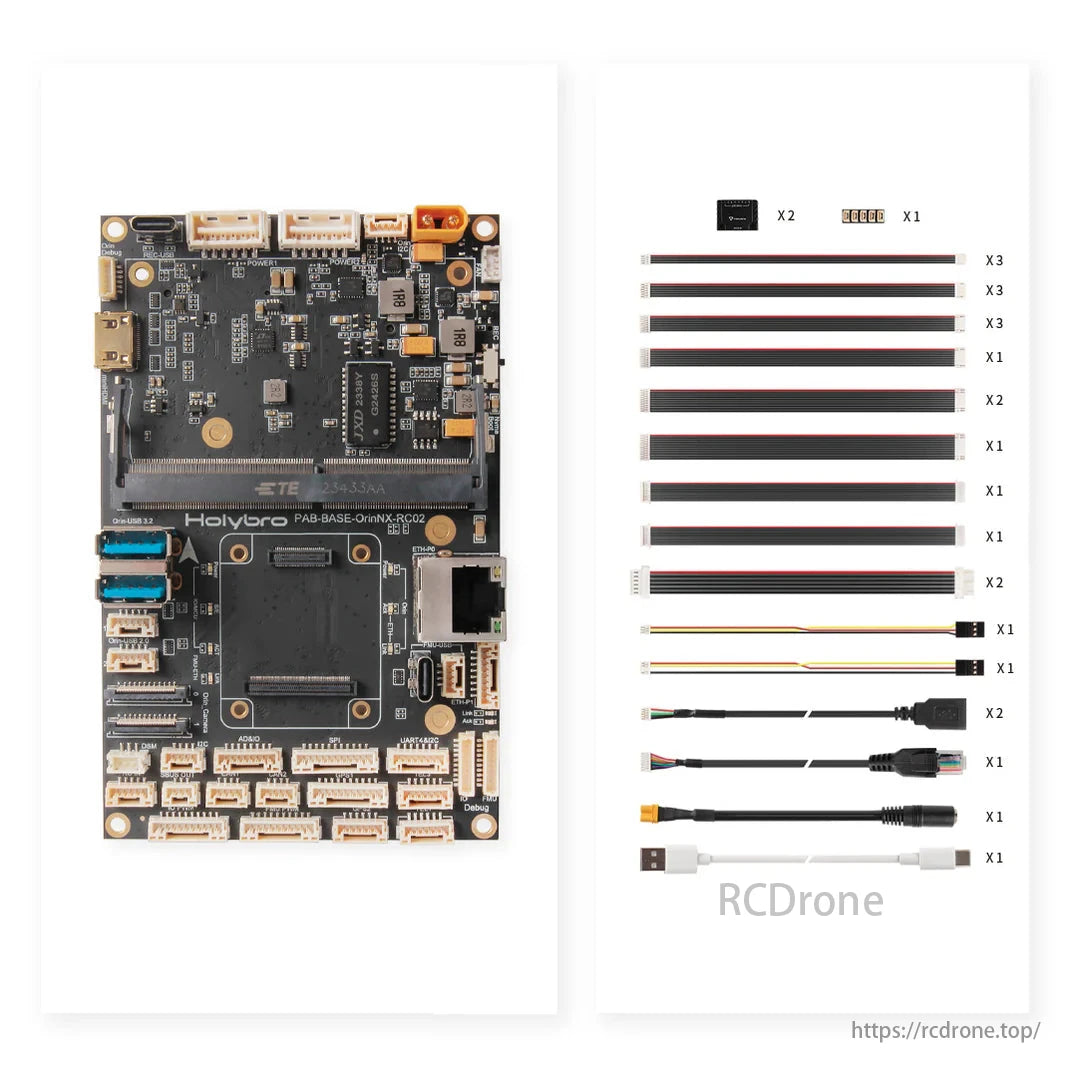
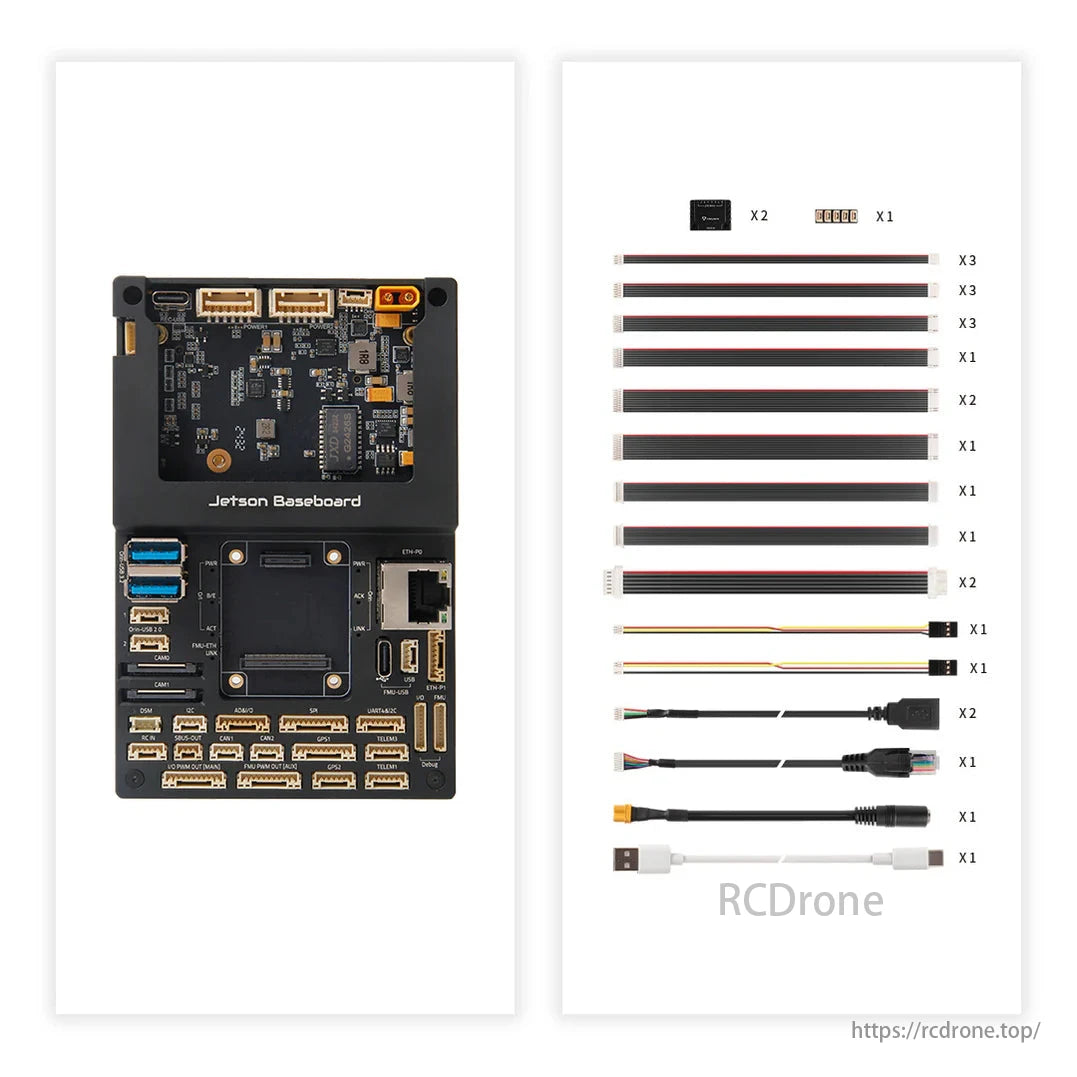
Jetson Baseboard Pekee
-
Ubao wa msingi wa Pixhawk Jetson Orin (Kesi ya w/ au w/o)
-
Seti ya Cable
Viungo vya Marejeleo
Kitambulisho Chaguomsingi cha Kuingia kwa Jetson Orin:
-
ID:
holybro -
Nenosiri:
123
Maelezo




Pixhawk na Nvidia Jetson wameunganishwa kwenye ubao mmoja.

Nvidia jetson iliyounganishwa kupitia uart can na swichi ya ethernet kwa kutumia kiunganishi cha rj45 kwa mifumo ya otomatiki.
Uainisho wa Chanzo Huria cha Pixhawk Autopilot (PAB).

Mfumo wa Kiunganishi cha Jetson SoDIMM Unaopatana Kabisa: Jetson Orin NX/Nano

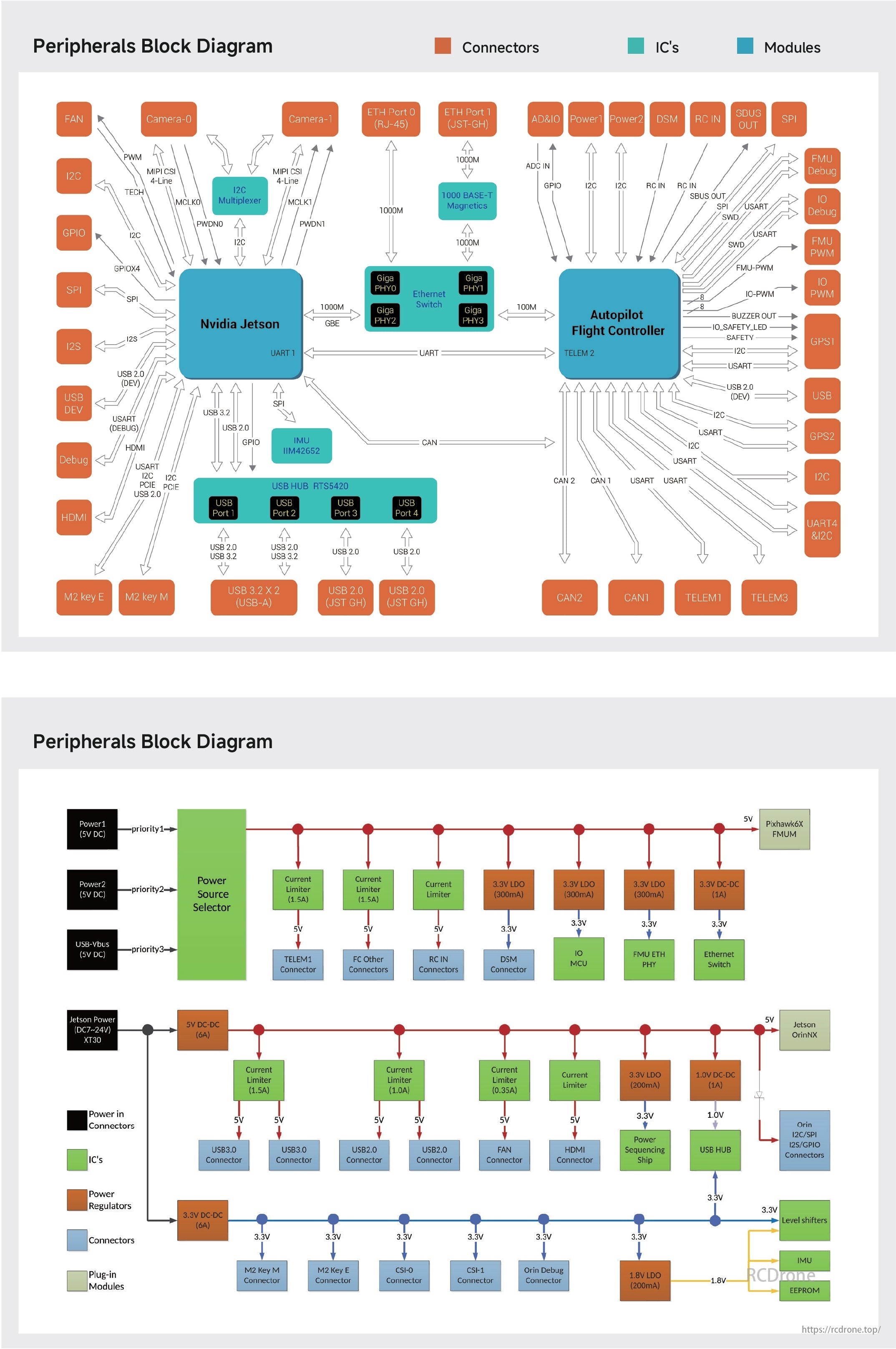
Picha inaonyesha mchoro wa vizuizi vya pembeni kwa mfumo uliopachikwa, unaoangazia vipengele kama vile Nvidia Jetson na Kidhibiti cha Ndege Kiotomatiki. Inajumuisha viunganishi mbalimbali, IC, na moduli kama vile bandari za USB, swichi za Ethaneti, na vidhibiti vya nishati, inayoonyesha miunganisho yao na mtiririko wa data.
Mchoro wa Wiring wa Marejeleo

Michoro miwili inaonyesha mifumo ya usambazaji wa nguvu kwa moduli ya Jetson kwa kutumia betri moja. Mchoro wa kushoto hutumia Moduli ya Nguvu ya PM02D na Bodi ya Usambazaji wa Nishati, huku mchoro wa kulia unajumuisha UBEC ya Nje ya betri kubwa kuliko 4S.Mipangilio yote miwili inahakikisha udhibiti sahihi wa voltage kwa Jetson na Pixhawk Power.
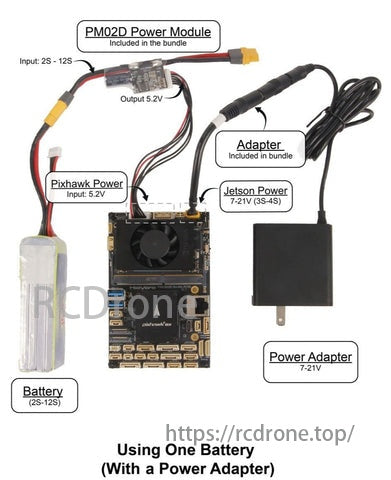
Moduli ya Nguvu ya PM02D huunganisha betri kwenye Pixhawk na Jetson, kwa kutumia betri moja iliyo na adapta ya nishati ya kuingiza 7-21V.
Related Collections