







LINKERBOT Mkono wa Roboti wa Linker Hand L6, 6 DoF, CAN, Uendeshaji wa Kiungo, Nguvu ya Kushika 50N, Urejeleo wa ±0.2mm
LINKERBOT Mkono wa Roboti wa Linker Hand L6, 6 DoF, CAN, Uendeshaji wa Kiungo, Nguvu ya Kushika 50N, Urejeleo wa ±0.2mm
LINKERBOT
Couldn't load pickup availability
Muhtasari
LINKERBOT Linker Hand L6 ni Mkono wa Roboti wenye ustadi ulioandaliwa kwa ajili ya usimamizi sahihi. Ina nyuzi 6 za uhuru (DoF) na viungo 11 (6 vinavyofanya kazi + 5 visivyo na kazi) pamoja na uhamasishaji wa kiunganishi na interface ya udhibiti wa CAN. Muundo ulioonyeshwa katika picha za bidhaa unasisitiza vidole vyote vya chuma, silicone inayostahimili kuvaa kwenye vidole, sensorer za shinikizo za vidole vitano, taa za onyo, pad ya mpira ya nusu-kichwa inayopinga kukandamizwa, na silinda ya umeme ya usahihi wa juu inayosukuma moja kwa moja.
Vipengele Muhimu
- Usimamizi wa ustadi wa DoF 6; viungo 11 (6 vinavyofanya kazi + 5 visivyo na kazi).
- Uhamasishaji wa kiunganishi na udhibiti wa basi ya CAN.
- Usahihi wa kurudiwa kwa nafasi: ±0.2mm.
- Uwezo wa nguvu: nguvu ya juu ya kidole cha gumba 10N; nguvu ya juu ya vidole vinne 8N; nguvu ya kushika vidole vitano 50N.
- Array ya sensor ya kugusa ya vidole vitano ya piezoresistive kwa kipimo cha mawasiliano/shinikizo.
- Vipengele vya muundo vilivyoonyeshwa: vidole vyote vya chuma, vidokezo vya silicone vinavyostahimili kuvaa, mwanga wa onyo, pad ya mpira ya kuzuia kukandamizwa.
- Mpangilio mdogo &na wa haraka; mfumo wa sensor nyingi (ikiwemo kamera na ngozi ya kielektroniki) na ujumuishaji wa kifaa-na-wingu kama inavyoonyeshwa katika picha za bidhaa.
Kwa mauzo na msaada wa kiufundi, wasiliana [email protected] or tembelea https://rcdrone.top/.
Maelezo
| Kigezo | Thamani |
|---|---|
| Nyakati za Uhuru (DoF) | 6 |
| Idadi ya Viungo | 11 (6 Inayotenda + 5 Isiyotenda) |
| Njia ya Usafirishaji | Usafirishaji wa Kiungo |
| Kiolesura cha Udhibiti | CAN |
| Uzito | 623.5g |
| Mzigo wa Juu | 28kg |
| Voltage ya Uendeshaji | DC24V±10% |
| Mtiririko wa Kawaida | 0.2A |
| Mtiririko wa Kawaida (Harakati Bila Mzigo) | 0.75A |
| Mtiririko wa Juu | 1.4A |
| Usahihi wa Kurudiwa kwa Nafasi | ±0.2mm |
| Nguvu ya Kichwa ya Kidole Gumba | 10N |
| Nguvu ya Kichwa ya Vidole Vinne | 8N |
| Nguvu ya Kushika ya Vidole Vitano | 50N |
Utendaji wa Harakati
| Sehemu ya Harakati | Kiwango cha Pembe (°) | Speed ya Harakati (°/s) |
|---|---|---|
| Mzizi wa Kidole Gumba | 57 | 152.82 |
| Mzizi wa Kidole cha Kwanza | 72.30 | 213.27 |
| Mzizi wa Kidole cha Kati | 72.90 | 208.29 |
| Mzizi wa Kidole cha Pete | 73.10 | 202.49 |
| Mzizi wa Kidole Kidogo | 72.60 | 201.11 |
| Kichwa cha Kidole Gumba | 69.90 | 192.84 |
| Kidole cha Kwanza | 64.60 | 192.84 |
| Kidole cha Kati | 65.10 | 185.32 |
| Kidole cha Pete | 66.90 | 185.32 |
| Kidole cha Ndogo | 66.70 | 184.76 |
| Swing ya Kando ya Kidole Kikuu | 80 | 235.29 |
| Wakati wa Kufungua na Kufunga | - | 0.35s |
Vikadiria
| Parameta | Maelezo ya Kifaa |
|---|---|
| Piezoresistive Array | 6*12 |
| Eneo la Mzigo wa Sensor | 9.6*14.4mm |
| Nguvu ya Trigger | 5g |
| Kiwango cha Kipimo | 20N |
| Maisha ya Huduma | 100,000 Mizunguko |
| Kiwango cha Mawasiliano | 200FPS |
| Kiwango cha Thamani | 0~4095 |
Vipimo vya Kuonekana
| Maana | Parameta (mm) |
|---|---|
| Urefu kutoka kidole cha kati hadi msingi wa kiganja | 190.7 |
| Upana wa juu wa kiganja | 121 |
| Urefu kutoka kidole gumba hadi msingi wa kiganja | 134.3 |
| Kimo cha wrist | 9. |
| Vipimo vya wrist | 60 |
Nini Kimejumuishwa
- USB‑to‑CAN kebo ya urekebishaji x1
- Kebo ya kiunganishi XT30 (2+2) x1
- Adaptari ya nguvu x1
- Kebo ya nguvu x1
- Linker Hand L6 x1
Maombi
- Kushika kwa usahihi na kushughulikia vitu
- Kushika na kudhibiti zana
- Kazi za kuchukua na kuweka vipengele
Maelekezo
Linker Hand L6 Mwongozo wa Bidhaa (PDF)
Maelezo


Kidole cha roboti chenye utendaji wa juu chenye nyuzi 6 za uhuru. Kinajumuisha ufanisi wa compact, mfumo wa sensor nyingi, na uunganisho wa kifaa-kwa-wingu kwa udhibiti sahihi, urekebishaji wa mazingira, na kubinafsisha bila msimbo kupitia maktaba ya ujuzi wa wingu.



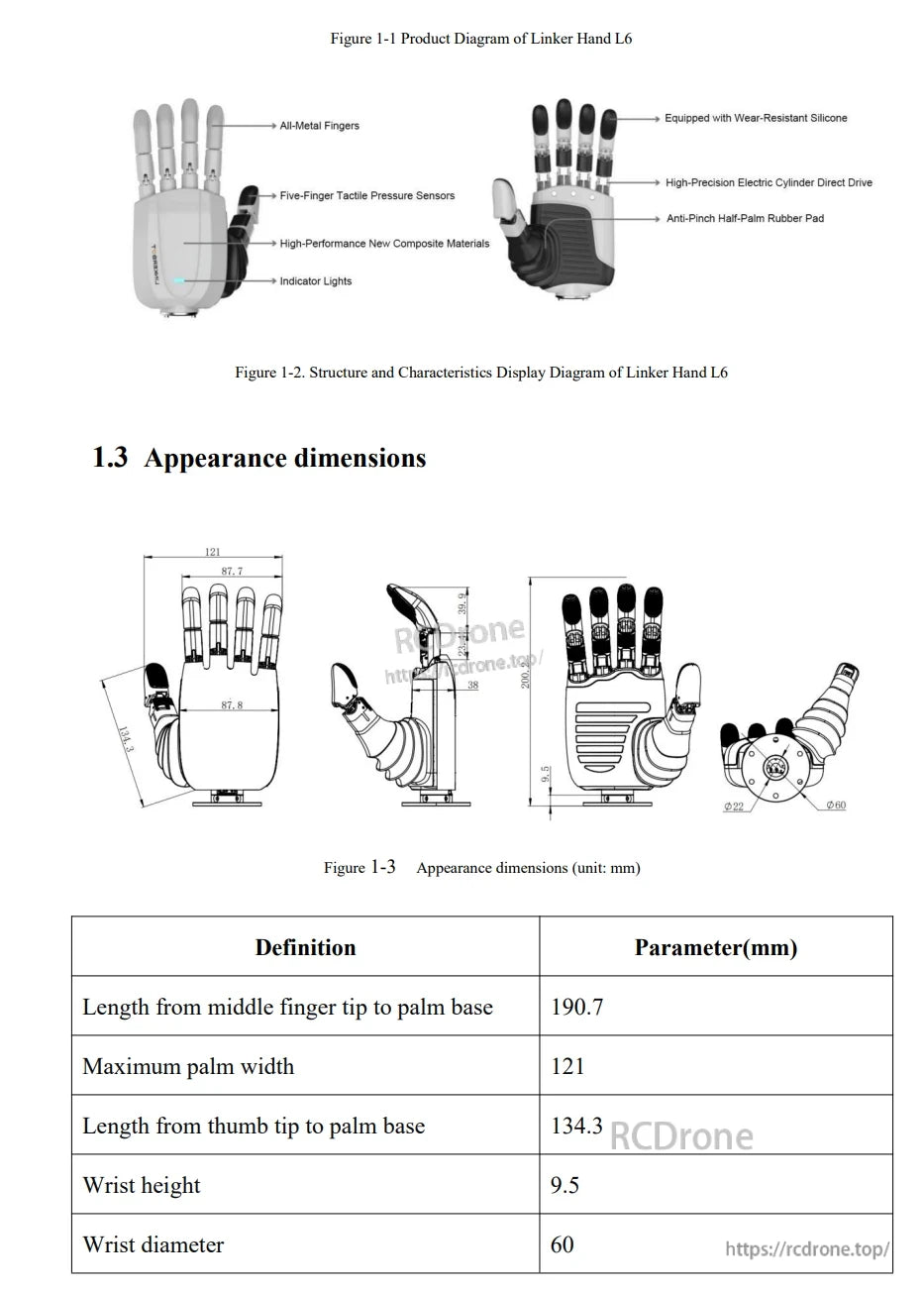
Linker Hand L6 ina vidole vyote vya chuma, sensorer za kugusa, silicone inayostahimili kuvaa, kuendesha silinda ya umeme, na pad ya mpira ya kuzuia kukandamiza. Urefu wa kidole: 190.7mm; upana wa kiganja: 121mm; kipenyo cha wrist: 60mm.
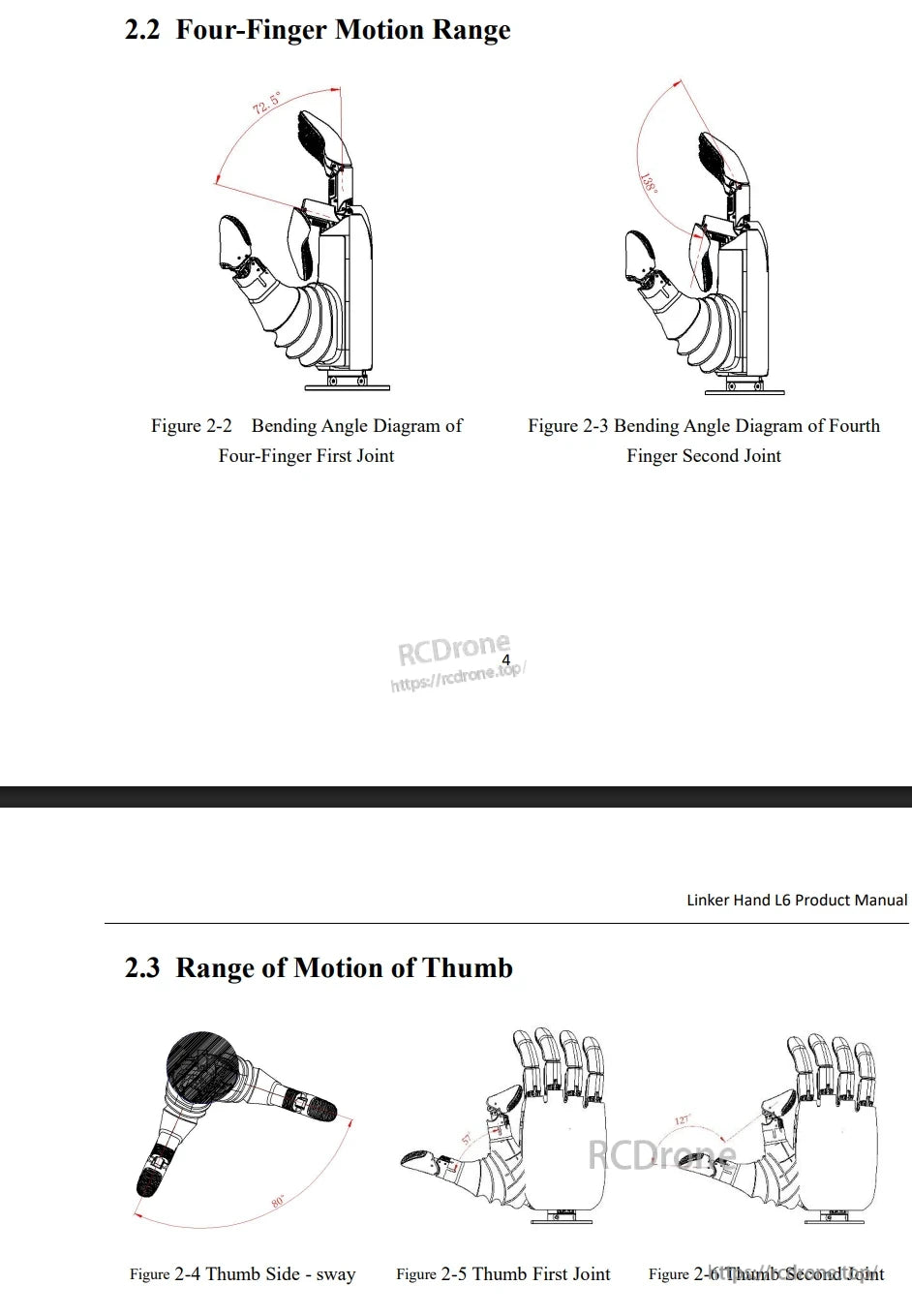
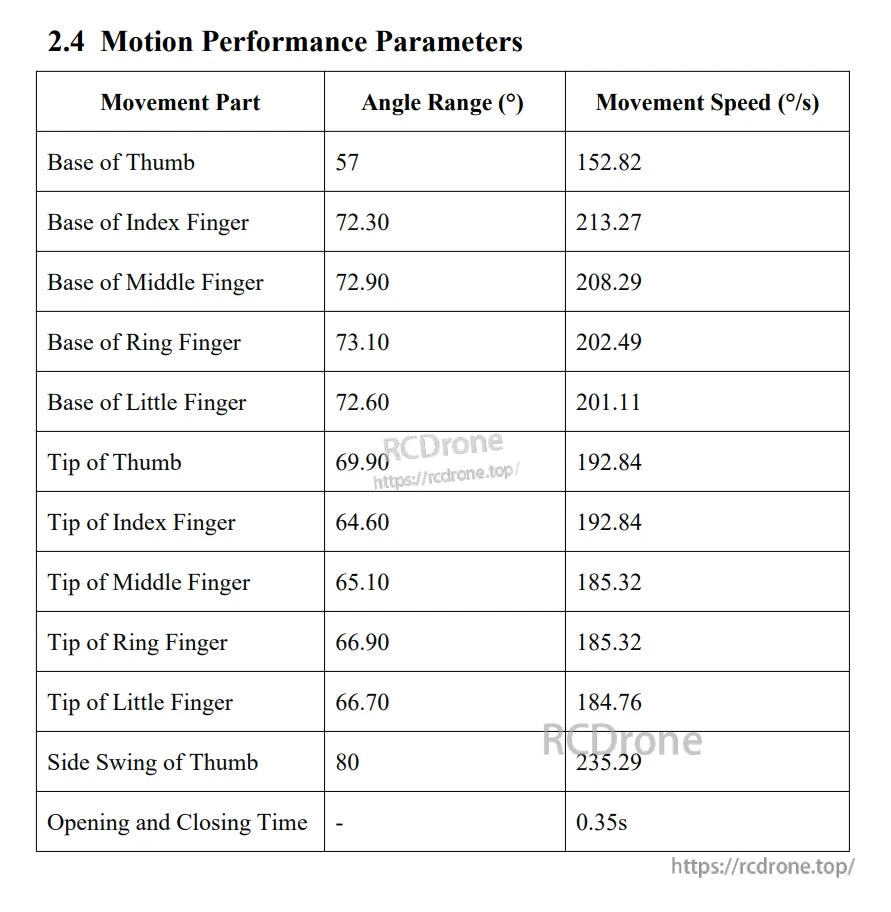
Mikono ya kidole na vidole vya mguu: kiunganishi cha kidole cha kwanza 72.5°, kiunganishi cha pili 138°; upande wa thumb-sway 80°, kiunganishi cha kwanza 57°, kiunganishi cha pili 127°.
Parameta za mwendo wa kidole cha mkono wa roboti: swing ya thumb kwa 235.29°/s, kufungua/kufunga ndani ya sekunde 0.35—ikiwasilisha uhamasishaji sahihi na anuwai za pembe za kiunganishi na kasi.
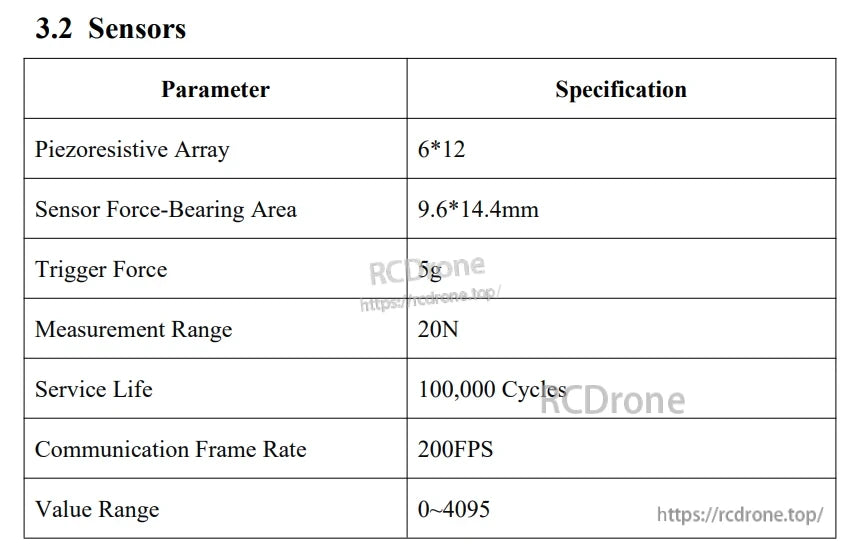
Maelezo ya sensor: 6x12 array, eneo la 9.6x14.4mm, trigger ya 5g, anuwai ya 20N, mizunguko 100k, 200FPS, anuwai ya thamani 0-4095.
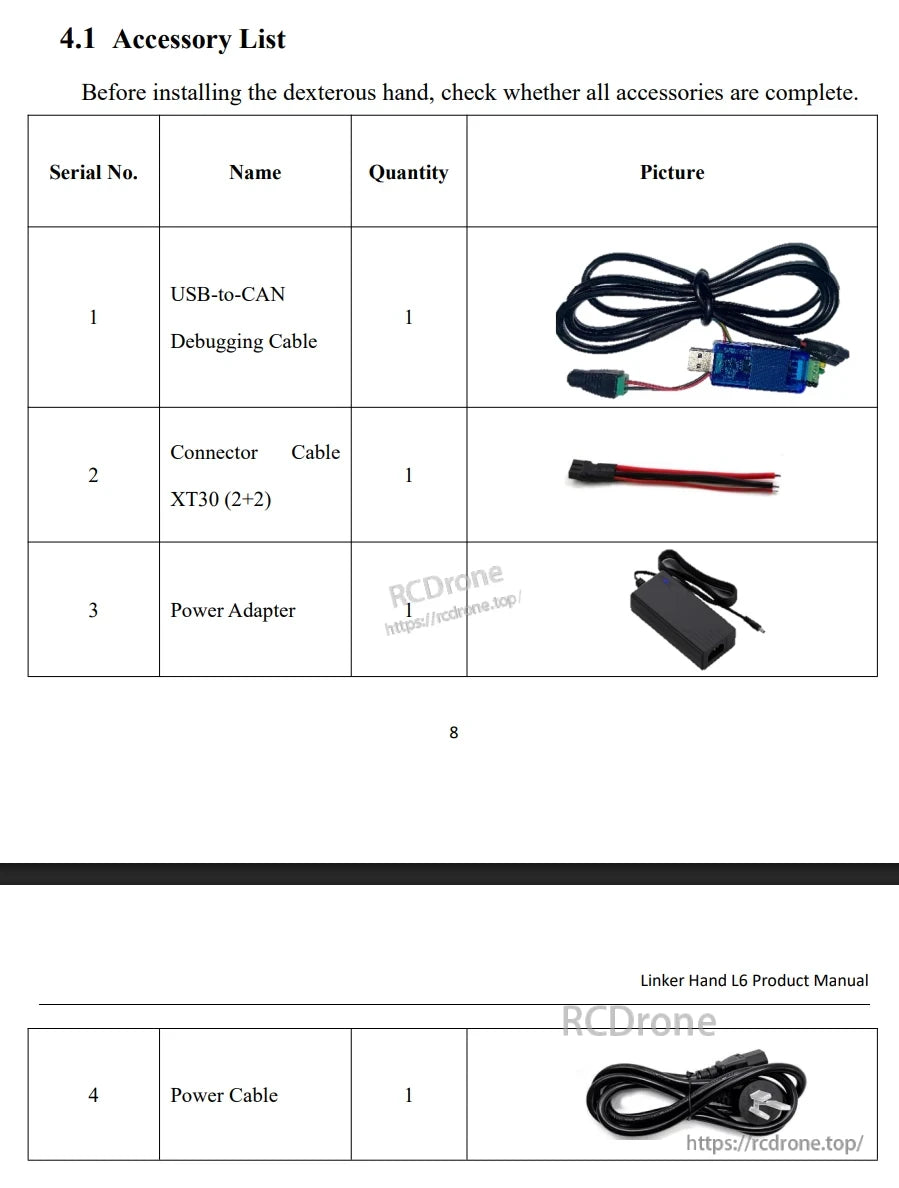
Orodha ya vifaa vya Linker Hand L6: kebo ya USB-to-CAN, kiunganishi cha XT30, adapta ya nguvu, na kebo ya nguvu. Hakikisha ukamilifu kabla ya usakinishaji.
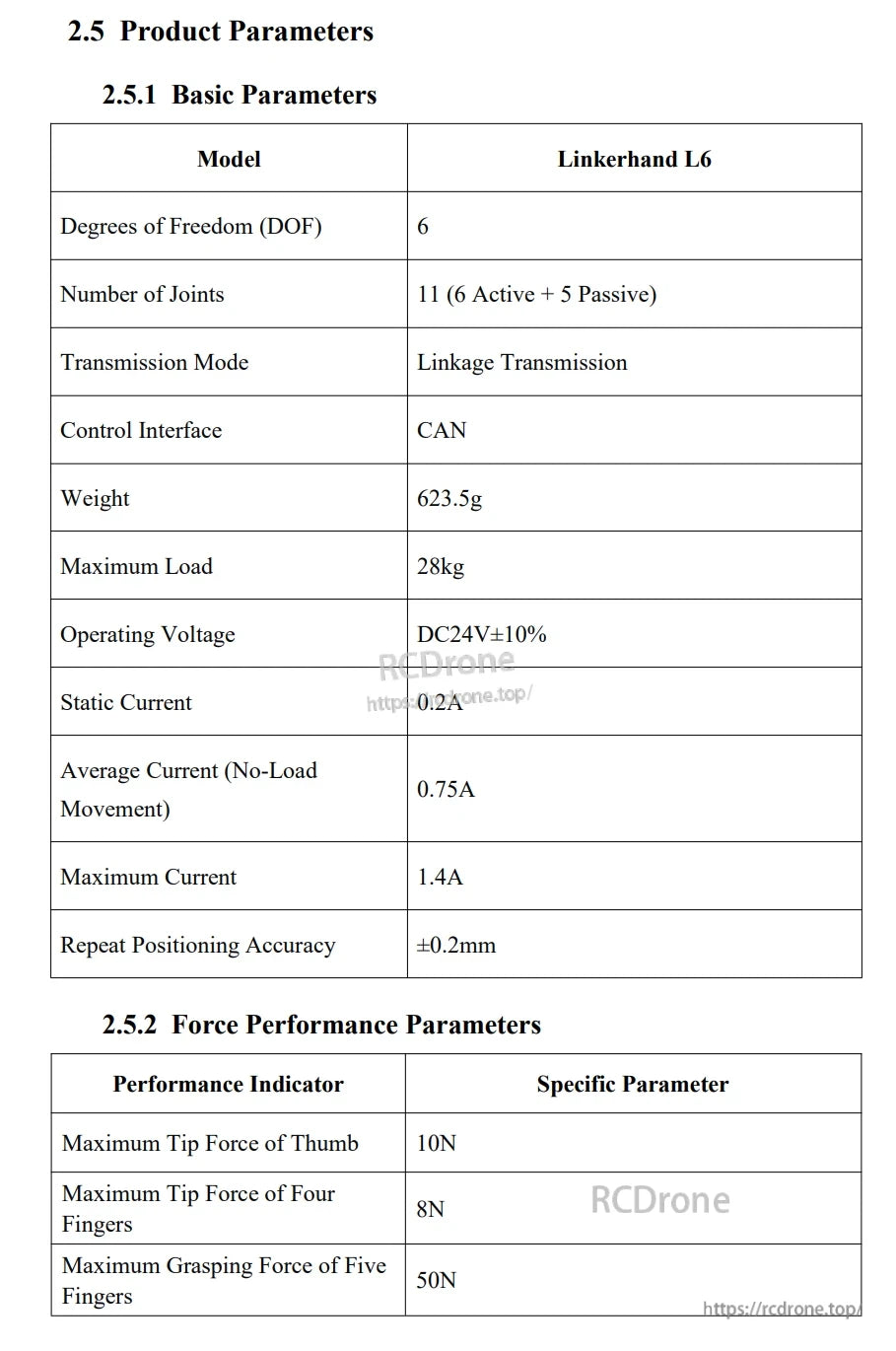
Kidole cha roboti cha Linkerhand L6 kina DOF 6, viungo 11, udhibiti wa CAN, kina uzito wa 623.5g, kinashughulikia mzigo wa juu wa 28kg, kinatumia DC24V±10%, kinatoa usahihi wa ±0.2mm, na kinatoa nguvu ya kushika hadi 50N.
Related Collections







