



LKMTECH MF12025-V2 Motor 24V 60W 10N.m Dereva Iliyounganishwa, Kichunguzi cha Sumaku cha 18-bit, CAN/RS485
LKMTECH MF12025-V2 Motor 24V 60W 10N.m Dereva Iliyounganishwa, Kichunguzi cha Sumaku cha 18-bit, CAN/RS485
LKMTECH
Couldn't load pickup availability
Muhtasari
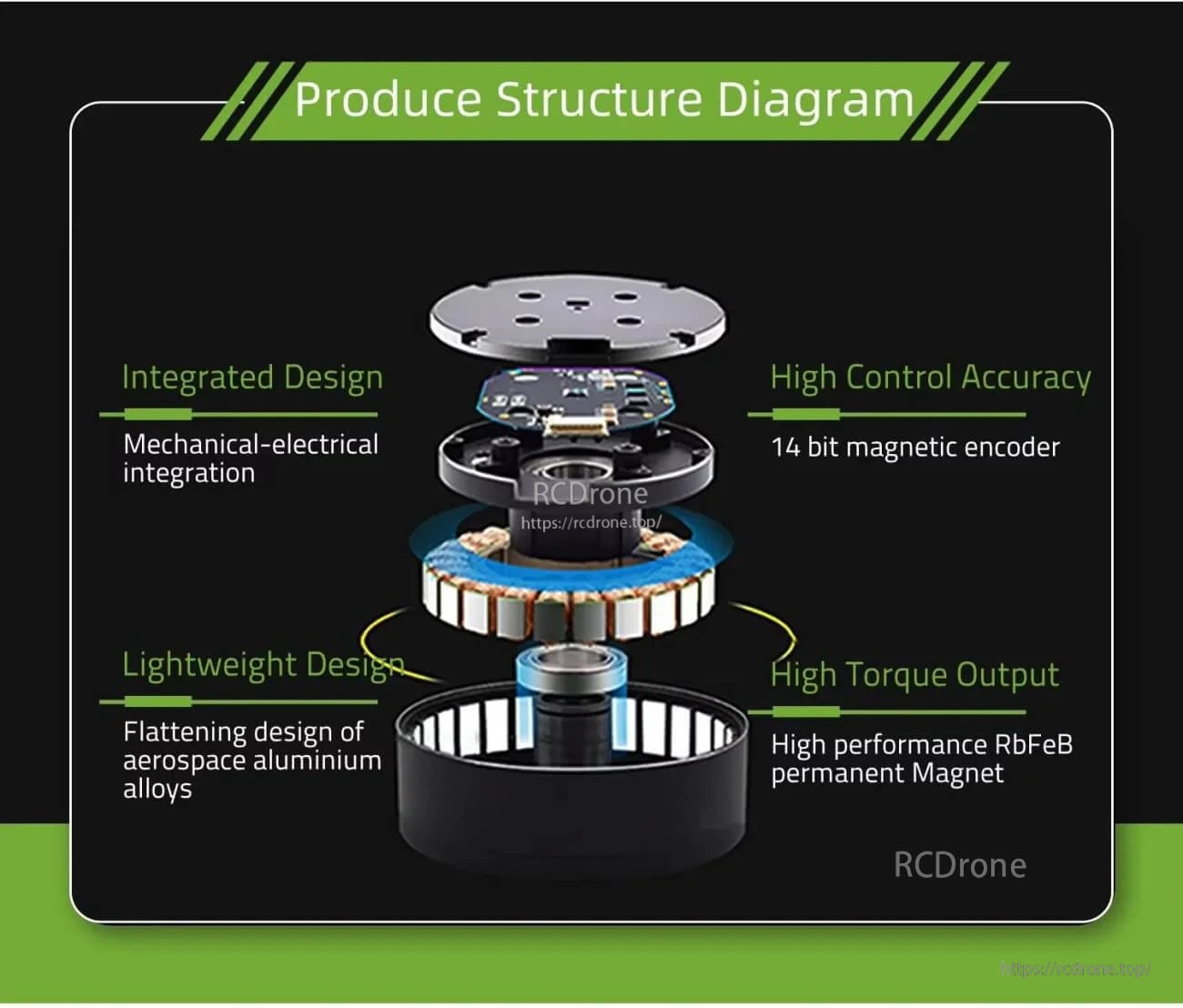
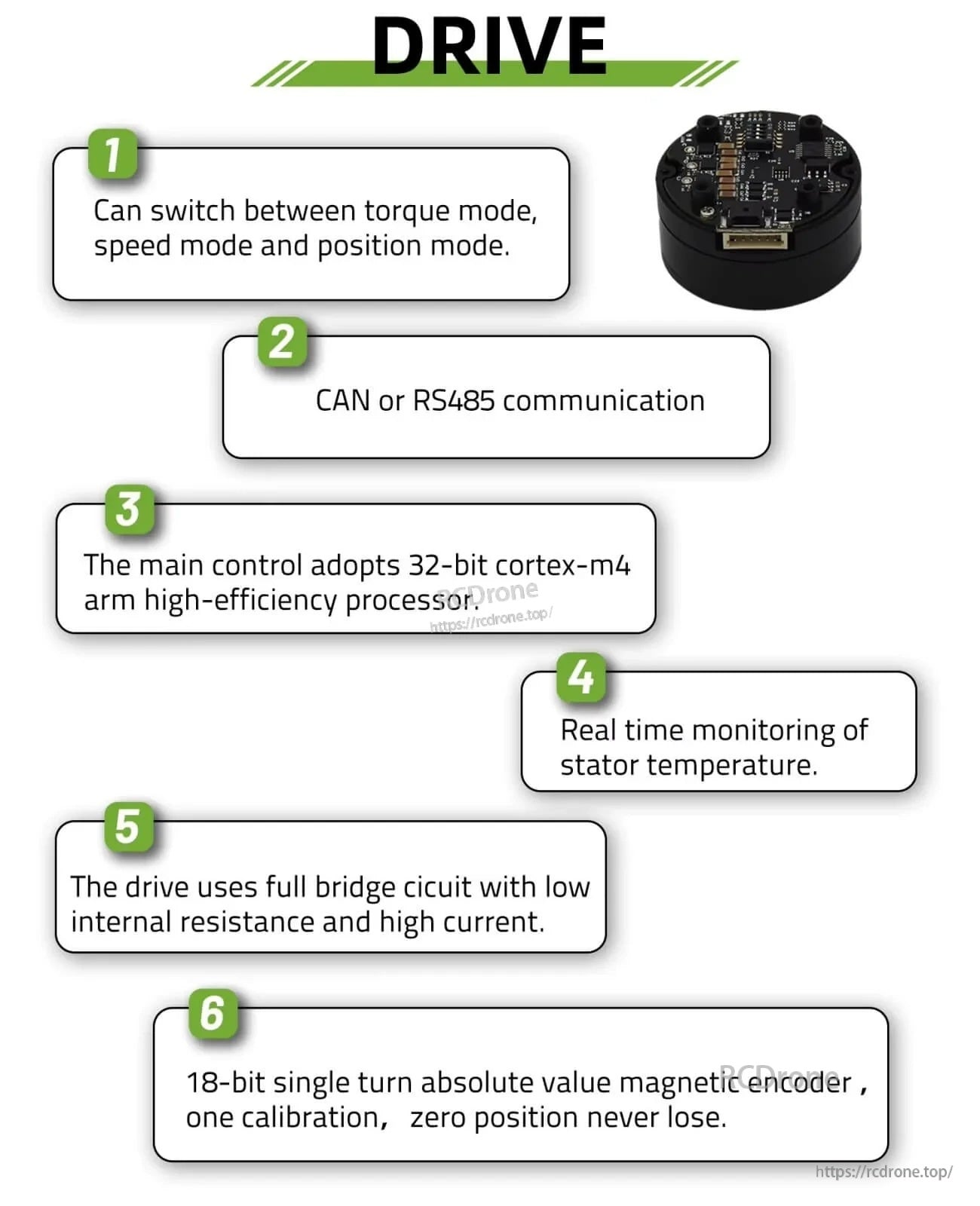
LKMTECH MF12025-V2 Motor ni motor iliyounganishwa yenye kuendesha na encoder iliyojengwa kwa mifumo ya uendeshaji wa roboti inayohitaji usahihi wa juu wa udhibiti na pato la torque kubwa. Inasaidia mawasiliano ya CAN au RS485 na inaweza kubadilisha kati ya hali ya torque, hali ya kasi na hali ya nafasi.
Vipengele Muhimu
- Muundo uliounganishwa (kuunganishwa kwa mitambo na umeme)
- Muundo mwepesi (muundo wa kupunguza wa aloi za alumini za anga)
- Matokeo ya torque ya juu (mchomo wa kudumu wa RbFeB)
- Njia za udhibiti: hali ya torque, hali ya kasi na hali ya nafasi
- Mawasiliano: CAN au RS485; inasaidia viwango mbalimbali vya baud
- Inasaidia pembejeo za PWM
- Ufuatiliaji wa wakati halisi wa joto la stator
- Udhibiti mkuu: processor ya ARM Cortex-M4 yenye ufanisi wa juu wa bit 32
- Dereva hutumia mzunguko wa daraja kamili wenye upinzani wa ndani wa chini na sasa ya juu
- Encoder ya magnetic ya thamani ya kipekee ya mzunguko wa 18-bit; kalibisho moja, nafasi ya sifuri haitapotea kamwe
- Timu ya kitaalamu ya kiufundi; inasaidia iliyoundwa maalum
- Maelezo ya ujenzi wa motor: rotor ya nje; muundo wa arc wa kudumu wa magneti wa hatua nyingi; pengo dogo la hewa; magnetization ya radial; 0.2mm karatasi ya chuma ya silicon; Waya ya enamel iliyotengwa ya daraja la H; Daraja la SH NdFeB; huduma ya OEM/ODM
- Programu ya programu inayotolewa kurekebisha vigezo, kupima na kuboresha; inasaidia maendeleo ya chanzo wazi kama vile PC, MCU, PLC, ICP na RPi
Maelezo
| Jina la Kitu | MF12025v2 |
| Zamu | 20 |
| Voltage iliyokadiriwa | 24V |
| Speed ya Juu | 250RPM |
| Torque iliyokadiriwa | 5N.m |
| Speed iliyokadiriwa | 115RPM |
| Current iliyokadiriwa | 4A |
| Power ya Juu | 60W |
| Torque ya Juu | 10N.m |
| Speed constant | 4.8rpm/V |
| Torque Constant | 1.25N.m/A |
| aina ya kuzungusha | Y |
| Upinzani wa Awamu | 2.4Ω |
| Inductance ya Awamu | 5mH |
| Nguzo za Motor | 42 |
| Inertia ya Rotor | 5500gcm² |
| Joto la Motor | NDIYO |
| Mzigo wa Kiwango cha Kichwa | 1560N |
| Uzito wa Motor | 1147g |
| Pendekeza Drive | DF70v2 |
| Voltage ya Ingizo la Drive | 7.4-32V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit Magnetic Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(24KHz)/Speed Loop(8KHz)/Position Loop(8KHz) |
| Kiwango cha Kuongeza | Kuongeza trapezoid |
Maombi
- Roboti za kibinadamu
- Mikono ya roboti
- Exoskeletons
- Roboti za mguu minne
- Magari ya AGV
- Roboti za ARU
- Kamera PTZ
- Laser LiDAR
- Roboti wa ukaguzi wa kituo cha nguvu
- Ukaguzi wa viwanda
Kwa ukaguzi wa ulinganifu kabla ya mauzo na msaada wa ujumuishaji, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Miongozo
Maelezo

Actuator iliyounganishwa motor kwa roboti inayounganisha kuendesha na encoder na inasaidia mawasiliano ya CAN na RS485.
 Mpangilio wa mitambo-na-kielektroniki uliounganishwa husaidia kuweka actuator kuwa ndogo huku ukihifadhi usahihi wa juu wa udhibiti na pato la torque.
Mpangilio wa mitambo-na-kielektroniki uliounganishwa husaidia kuweka actuator kuwa ndogo huku ukihifadhi usahihi wa juu wa udhibiti na pato la torque.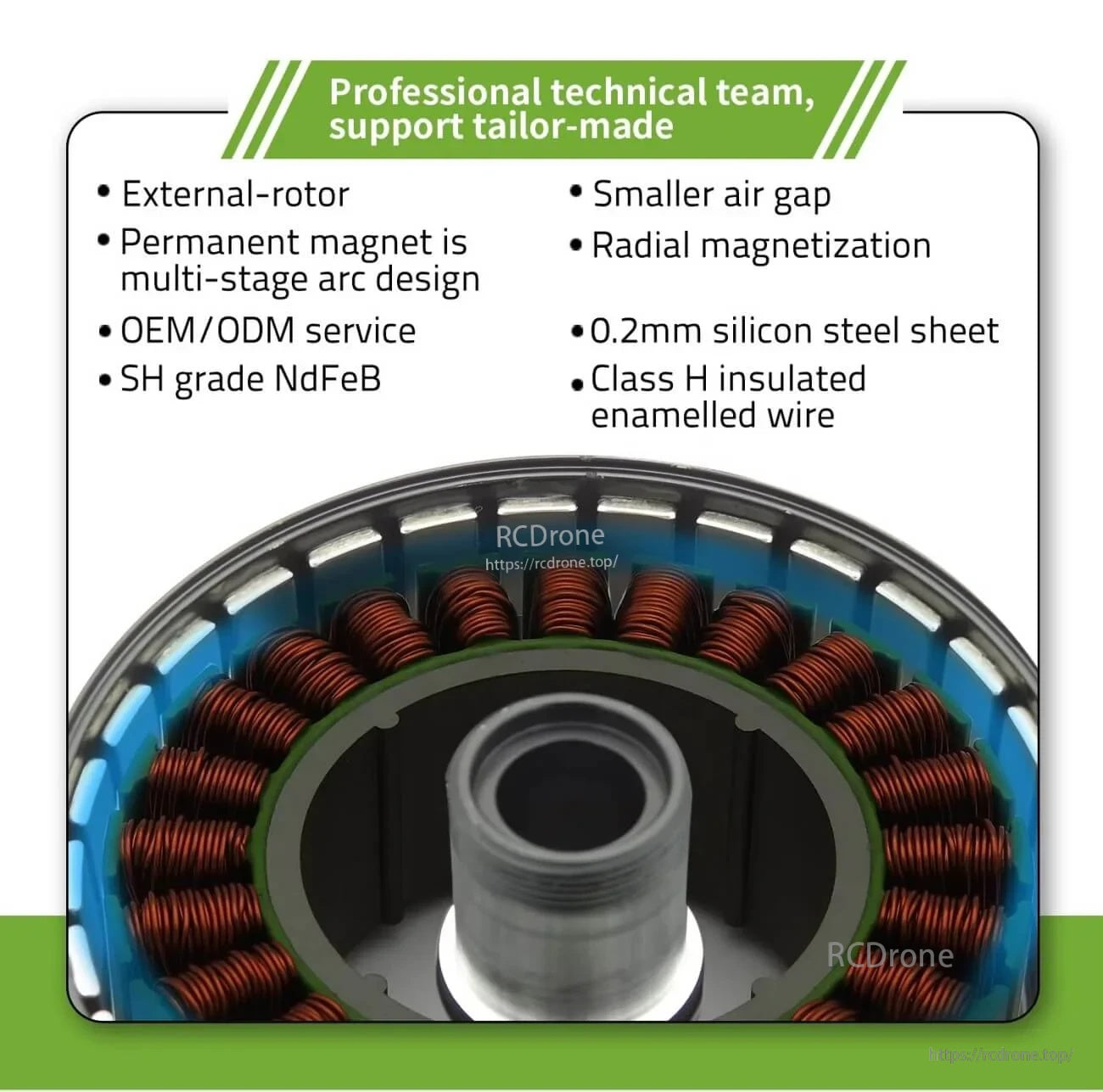
Maelezo ya ujenzi wa rotor wa nje na muundo wa magneti za kudumu yanasaidia utoaji wa torque laini kwa viungo sahihi na moduli za mwendo.
Njia za torque, kasi, na nafasi zinasaidiwa, zikiwa na ufuatiliaji wa joto uliojengwa ndani na chaguzi za kuunganishwa za CAN/RS485 zinazoweza kubadilishwa.
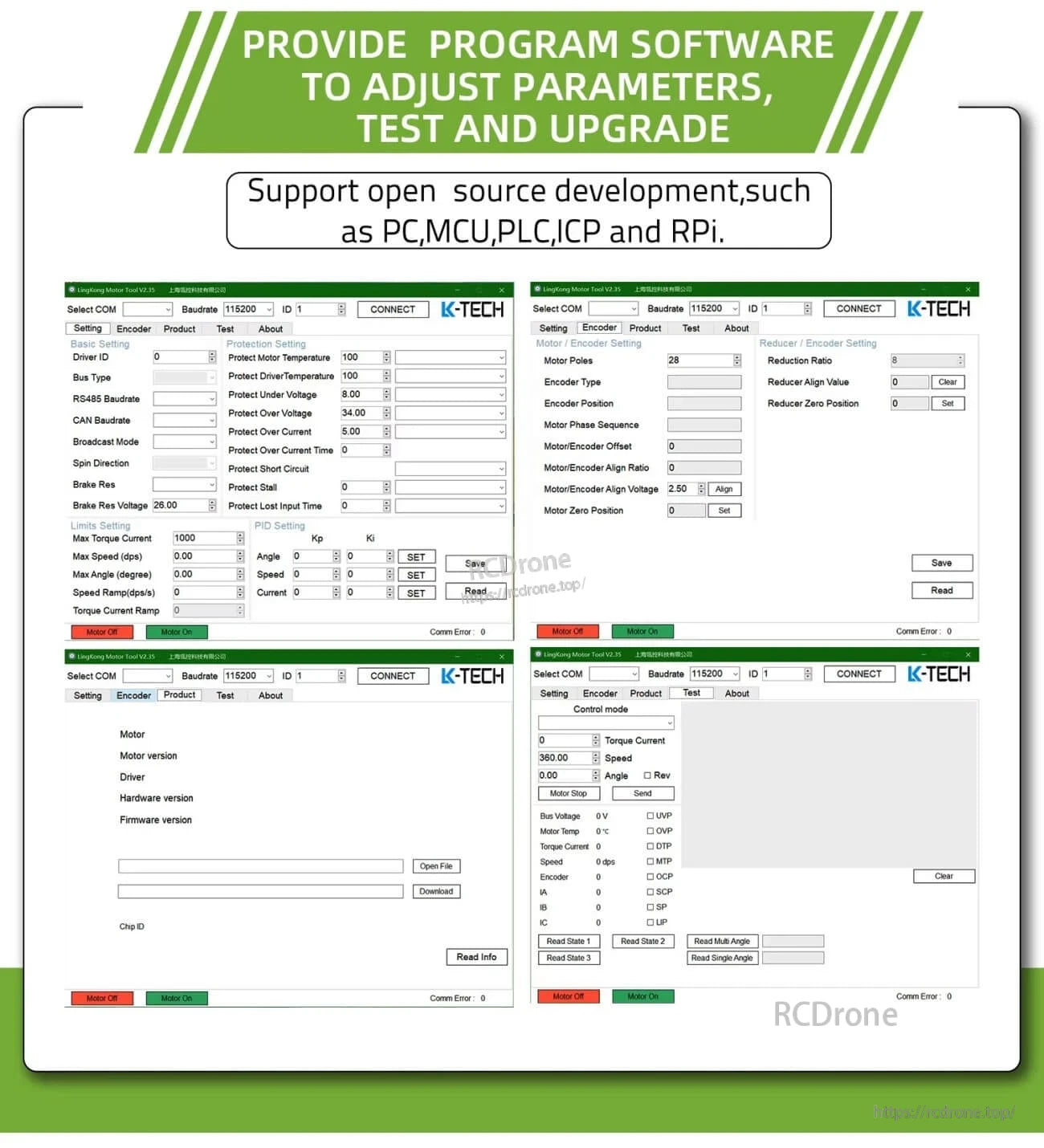
Programu ya PC inatolewa kwa ajili ya kurekebisha vigezo, majaribio, na masasisho, ikisaidia majukwaa ya kawaida ya maendeleo na wadhibiti.

Related Collections



