



LKMTECH MF6015-V2 Motor 24V (15T/25T) Kichunguzi cha Sumaku cha 18bit, RS485/CAN, Inapendekezwa kutumia DF40v2 Drive
LKMTECH MF6015-V2 Motor 24V (15T/25T) Kichunguzi cha Sumaku cha 18bit, RS485/CAN, Inapendekezwa kutumia DF40v2 Drive
LKMTECH
Couldn't load pickup availability
Muhtasari
LKMTECH MF6015-V2 Motor (MF6015v2) ni mfumo wa motor wa muundo wa pamoja ukionyesha ujenzi mwepesi, usahihi wa juu wa udhibiti, na pato kubwa la torque. Mabadiliko ya MF v2 yanajumuisha urefu wa encoder umeboreshwa kutoka 14-bit hadi 18-bit, kuimarishwa kwa torque ya cogging, kuungwa mkono kwa PWM, na mawasiliano ya CAN na RS485 na chaguo nyingi za baud-rate.
Vipengele Muhimu
- Muundo wa pamoja: uunganisho wa mitambo na umeme
- Muundo mwepesi: muundo wa kupunguza wa aloi za alumini za anga
- Pato kubwa la torque: magneti ya kudumu ya RbFeB yenye utendaji wa juu
- Maelezo ya ujenzi wa motor: rotor ya nje; muundo wa arc wa hatua nyingi wa magneti ya kudumu; pengo dogo la hewa; magnetization ya radial; 0.2mm karatasi ya chuma ya silicon; Nyaya ya H iliyotengwa na waya wa enamel; SH daraja NdFeB
- Uwezo wa Kuendesha/Kudhibiti: inaweza kubadilisha kati ya hali ya torque, hali ya kasi na hali ya nafasi; Mawasiliano ya CAN au RS485; udhibiti mkuu unatumia processor ya ARM cortex-m4 yenye ufanisi wa juu wa 32-bit; ufuatiliaji wa wakati halisi wa joto la stator; mzunguko wa daraja kamili wenye upinzani wa ndani wa chini na sasa ya juu
- Encoder: 18-bit single turn absolute value magnetic encoder; kalibrishaji moja; nafasi ya sifuri haitapotea kamwe
- Programu: toa programu ya programu kubadilisha vigezo, kupima na kuboresha; inasaidia maendeleo ya chanzo wazi kama vile PC, MCU, PLC, ICP na RPi
Kuhusu maswali ya uunganisho (kabeli, usanidi wa CAN/RS485, au uchaguzi kati ya 15T na 25T), wasiliana na msaada kwa https://rcdrone.top/ au [email protected].
Matukio ya Maombi
- Roboti za Binadamu
- mikono ya Roboti
- Exoskeletons
- Roboti za Mifugo
- Magari ya AGV
- Roboti za ARU
Maelezo
| Parameta | Thamani (15T) | Thamani (25T) |
|---|---|---|
| Jina la Kitu | MF6015v2 | MF6015v2 |
| Zinazozunguka | 15 | 25 |
| Voltage Iliyoainishwa | 24V | 24V |
| Speed Max | 1650RPM | 872RPM |
| Torque Iliyoainishwa | 0.81N.m | 0.82N.m |
| Speed Iliyoainishwa | 1260RPM | 560RPM |
| Current Iliyoainishwa | 5.87A | 3.1A |
| Max Power | 185W | 57W |
| Max Torque | 5.5N.m | 3N.m |
| Speed constant | 53rpm/V | 23.3rpm/V |
| Torque Constant | 0.14N.m/A | 0.26N.m/A |
| Winding Type | Y | Y |
| Line Resistance | 0.89Ω | 2.17Ω |
| Phase Inductance | 0.49mH | 1.44mH |
| Nguzo za Motor | 28 | 28 |
| Inertia ya Rotor | 515gcm² | 515gcm² |
| Joto la Motor | NDIYO | NDIYO |
| Mzigo wa Kuboreshwa wa Kijiko | 280N | 280N |
| Uzito wa Motor | 251g | 251g |
| Pendekeza Drive | DF40v2 | DF40v2 |
| Voltage ya Kuingiza Drive | 7.4-32V | 7.4-32V |
| Mawasiliano | RS485 AU CAN | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit Magnetic Encoder | 18bit Magnetic Encoder |
| Baudrate ya Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(24KHz)/Speed Loop(8KHz)/Position Loop(8KHz) | Torque Loop(24KHz)/Speed Loop(8KHz)/Position Loop(8KHz) |
| Curve ya Kuongeza Kasi | Kuongeza kasi ya Trapeziod | Trapeziod kuharakisha |
Maelezo ya Kiolesura
| Kiolesura | Kumbuka |
|---|---|
| B/L | RS485-B Au CAN-L |
| A/H | RS485-A Au CAN-H |
| V- | Ugavi wa Nguvu Mbaya |
| V- | Ugavi wa Nguvu Mbaya |
| V+ | Ugavi wa Nguvu Chanya |
| V+ | Ugavi wa Nguvu Chanya |
| T | Mtumaji wa UART |
| R | Mpokeaji wa UART |
| G | Signal GND |
SWITCH YA KITAMBULISHO inapatikana kwenye kitengo.
Maelekezo / Hati
Maelezo

MF6015-V2 inajumuisha motor, kuendesha na encoder ya magnetic ya 18-bit kwa viungo vya roboti vya 24V vyenye udhibiti wa CAN au RS485.
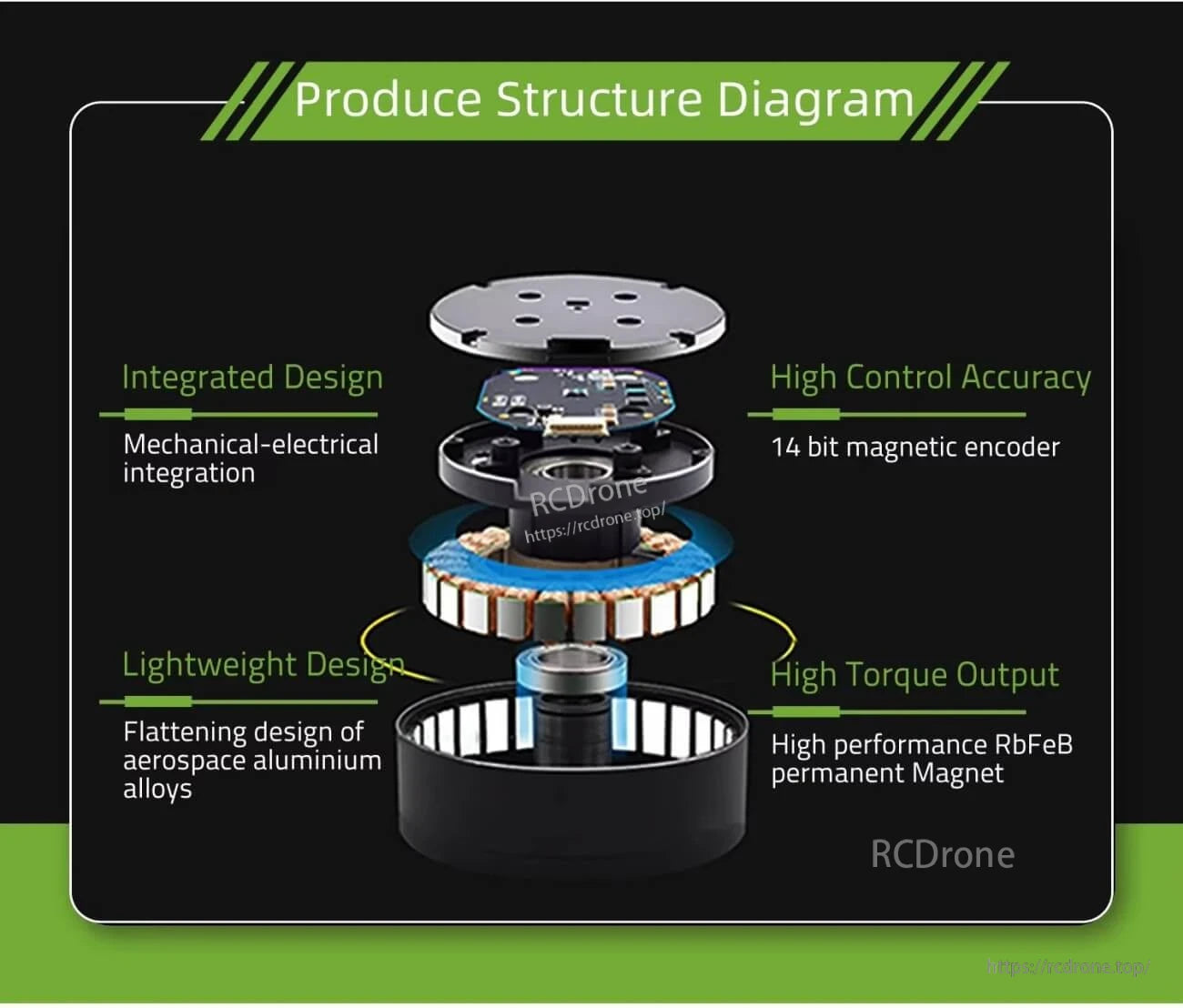
Mpangilio wa mitambo-kielektroniki uliojumuishwa unashikilia mkusanyiko kuwa tambarare na mwepesi huku ukihifadhi pato kubwa la torque.
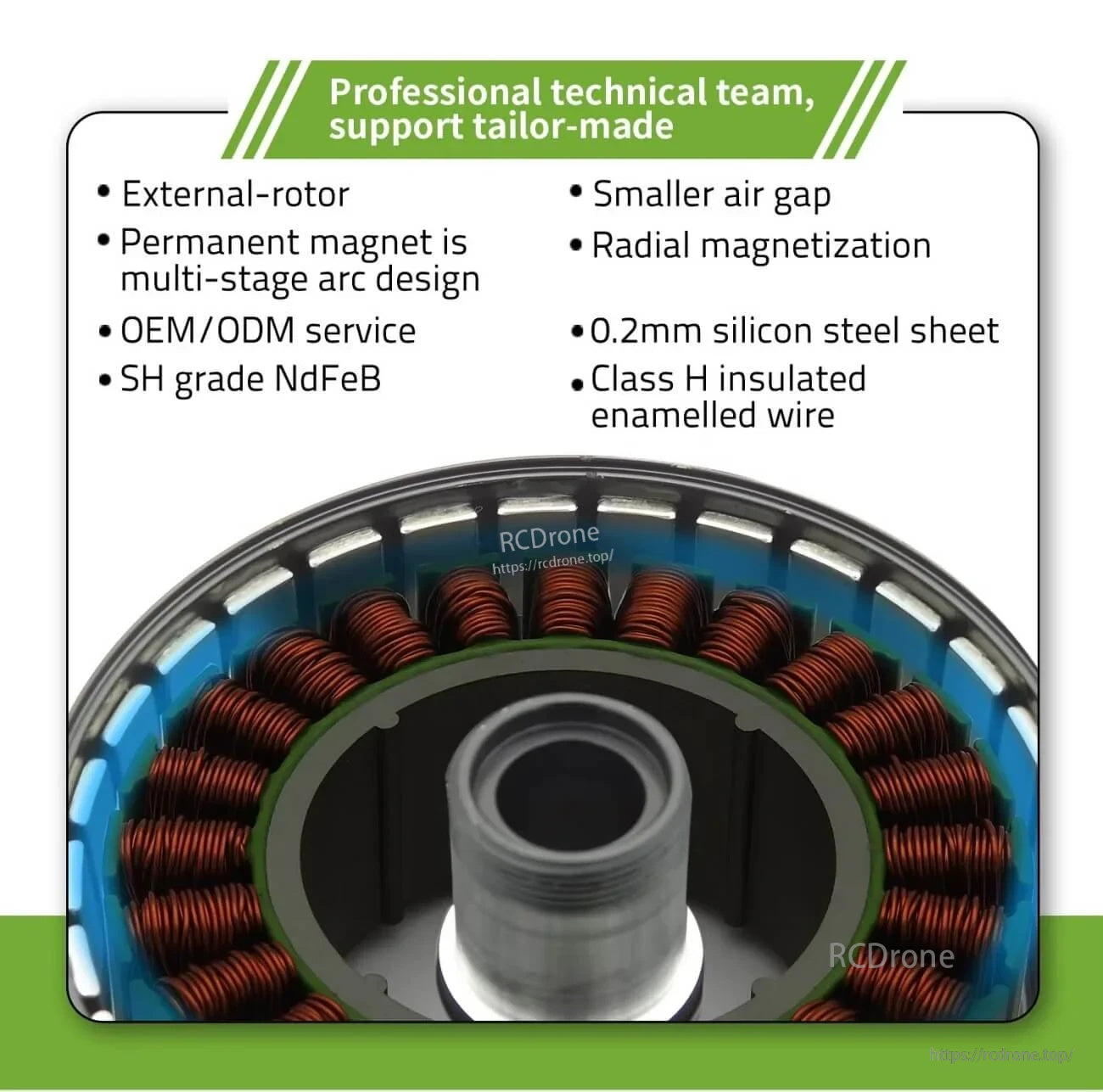
Ujenzi wa rotor ya nje wenye pengo dogo la hewa umeundwa kuboresha wingi wa torque na mzunguko laini.
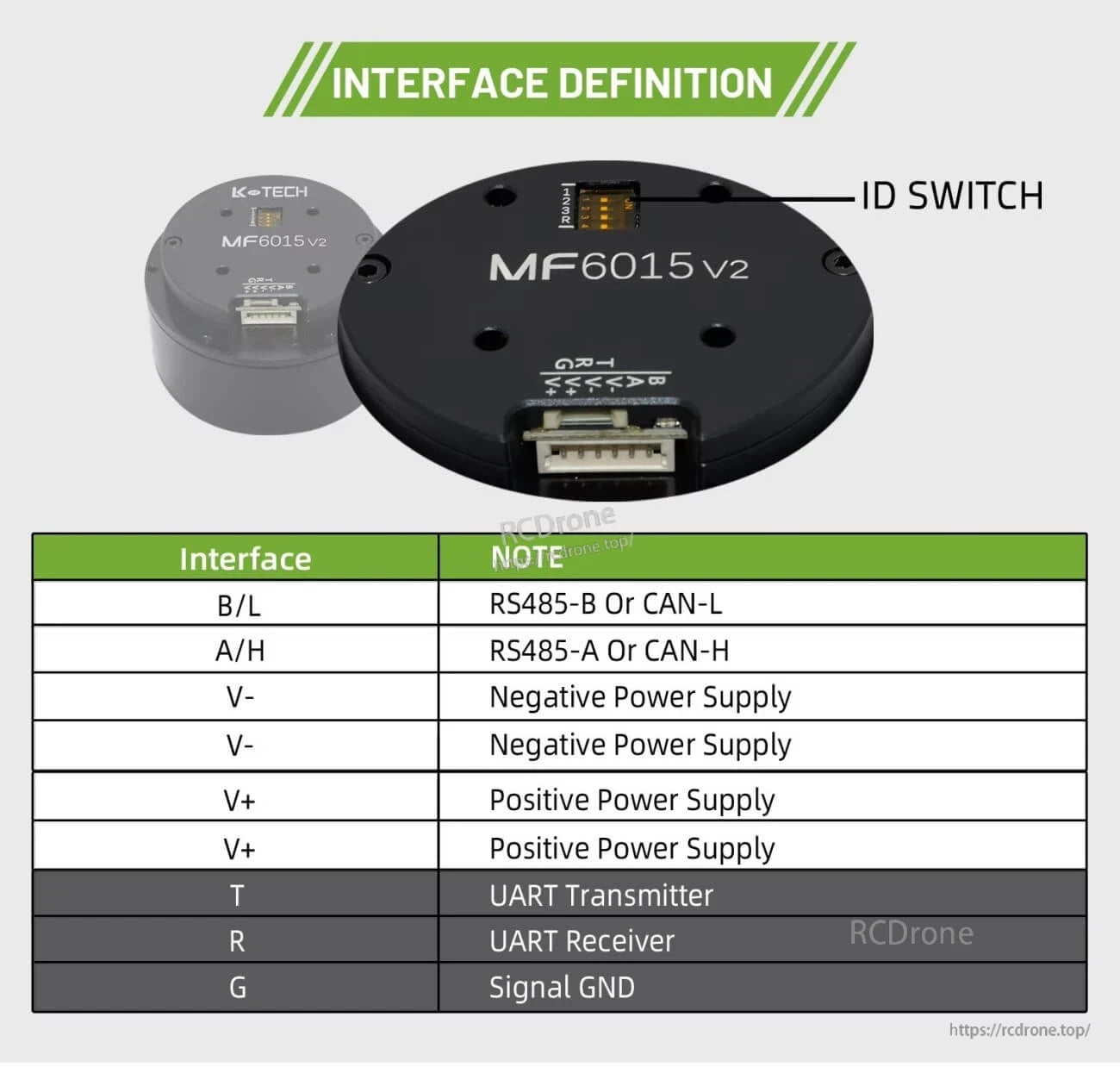
Pinout ya kiunganishi na swichi ya ID iliyopo kwenye bodi inafanya wiring na anwani za CAN/RS485 za nodi nyingi kuwa rahisi zaidi.
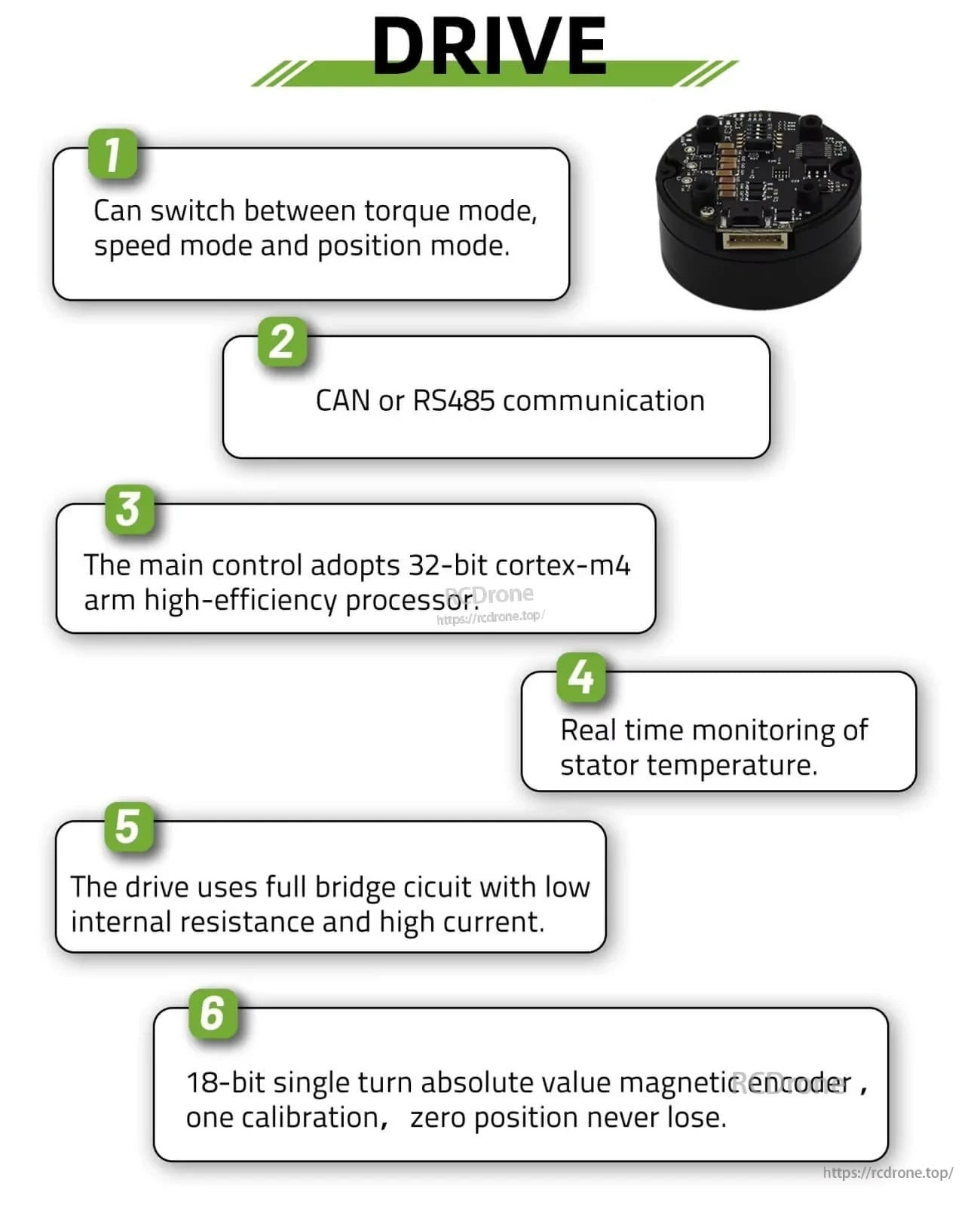
Njia za kudhibiti torque, kasi na nafasi zinasaidiwa, huku ikifuatilia joto la stator kwa wakati halisi kupitia CAN au RS485.
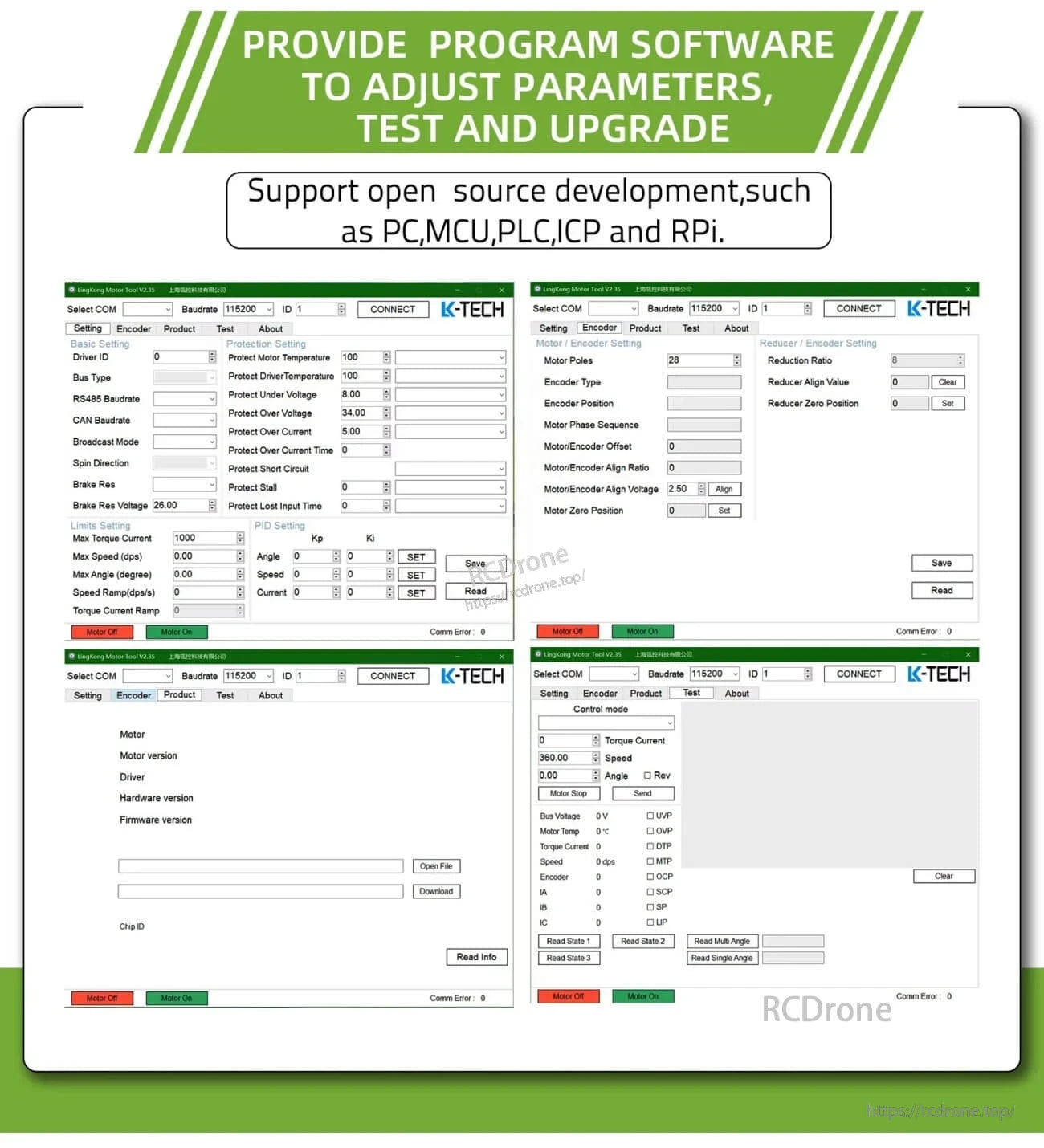
Programu ya PC inatolewa kwa ajili ya kurekebisha vigezo, kupima na kuboresha firmware, ikiwa na chaguzi za kiwango cha baud na mipangilio ya udhibiti.

Related Collections



