




LKMTECH MG4005E-i10-V3 Motoru wa Gia ya Sayari, 24V 1:10 PG4210, RS485/CAN Kichunguzi Maradufu
LKMTECH MG4005E-i10-V3 Motoru wa Gia ya Sayari, 24V 1:10 PG4210, RS485/CAN Kichunguzi Maradufu
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG4005E-i10-V3 ni motor ya gia ya sayari iliyoundwa kwa ajili ya mwendo wa roboti na viunganishi vya automatisering vinavyohitaji gia ndogo, mrejesho wa mzunguko uliofungwa, na mawasiliano ya basi. Inajumuisha mpunguzaji wa gia ya sayari (PG4210, 1:10) na vichanganuzi vya sumaku vya kipekee viwili (sehemu ya motor + sehemu ya mpunguzaji) kwa udhibiti sahihi.
Vipengele Vikuu
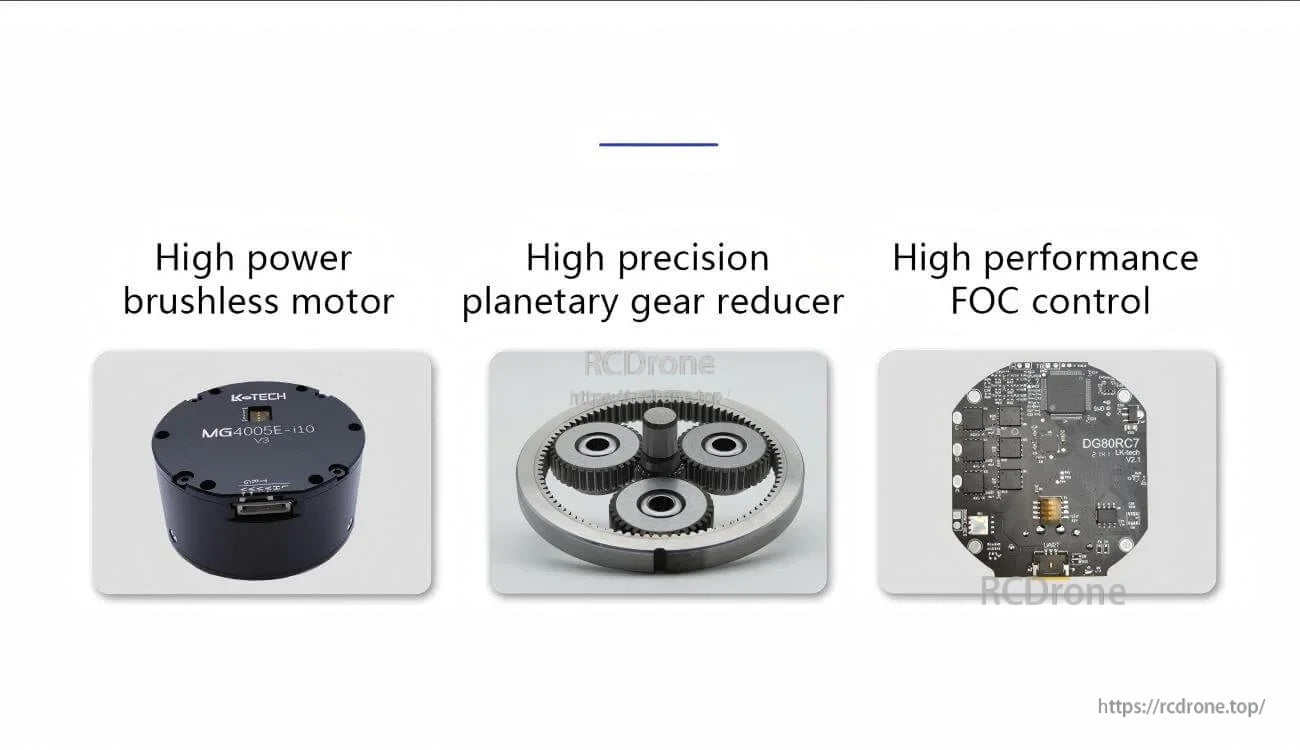
- Motor ya gia ya sayari: nguvu kubwa, torque kubwa, na usahihi wa juu
- Motor isiyo na brashi + reducer ya gia ya sayari yenye usahihi wa juu
- Udhibiti wa FOC (kuendesha/mwendeshaji unahitajika)
- Encoders mbili: encoder ya magnetic ya kipekee ya 18-bit (kando ya motor) + encoder ya magnetic ya kipekee ya 14-bit (kando ya reducer)
- Encoder upande wa reducer inasaidia kutoa thamani ya kipekee ya mzunguko mmoja na kukumbuka pointi ya sifuri baada ya kuzima nguvu
- Mawasiliano ya RS485 au CAN bus
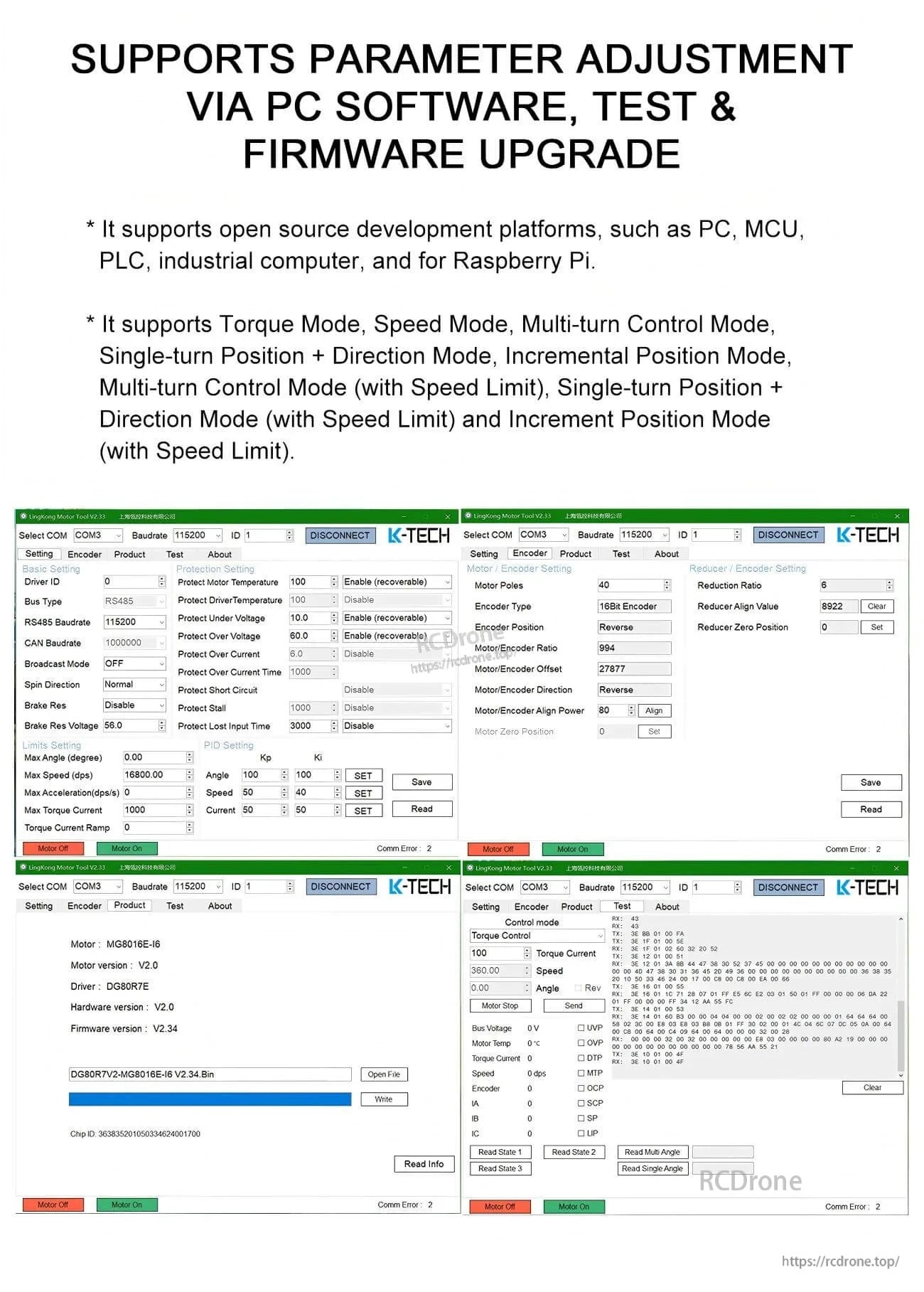
- Inasaidia marekebisho ya vigezo kupitia programu ya PC, mtihani, na sasisho la firmware
- Inasaidia majukwaa ya maendeleo ya chanzo wazi: PC, MCU, PLC, kompyuta ya viwandani, na Raspberry Pi
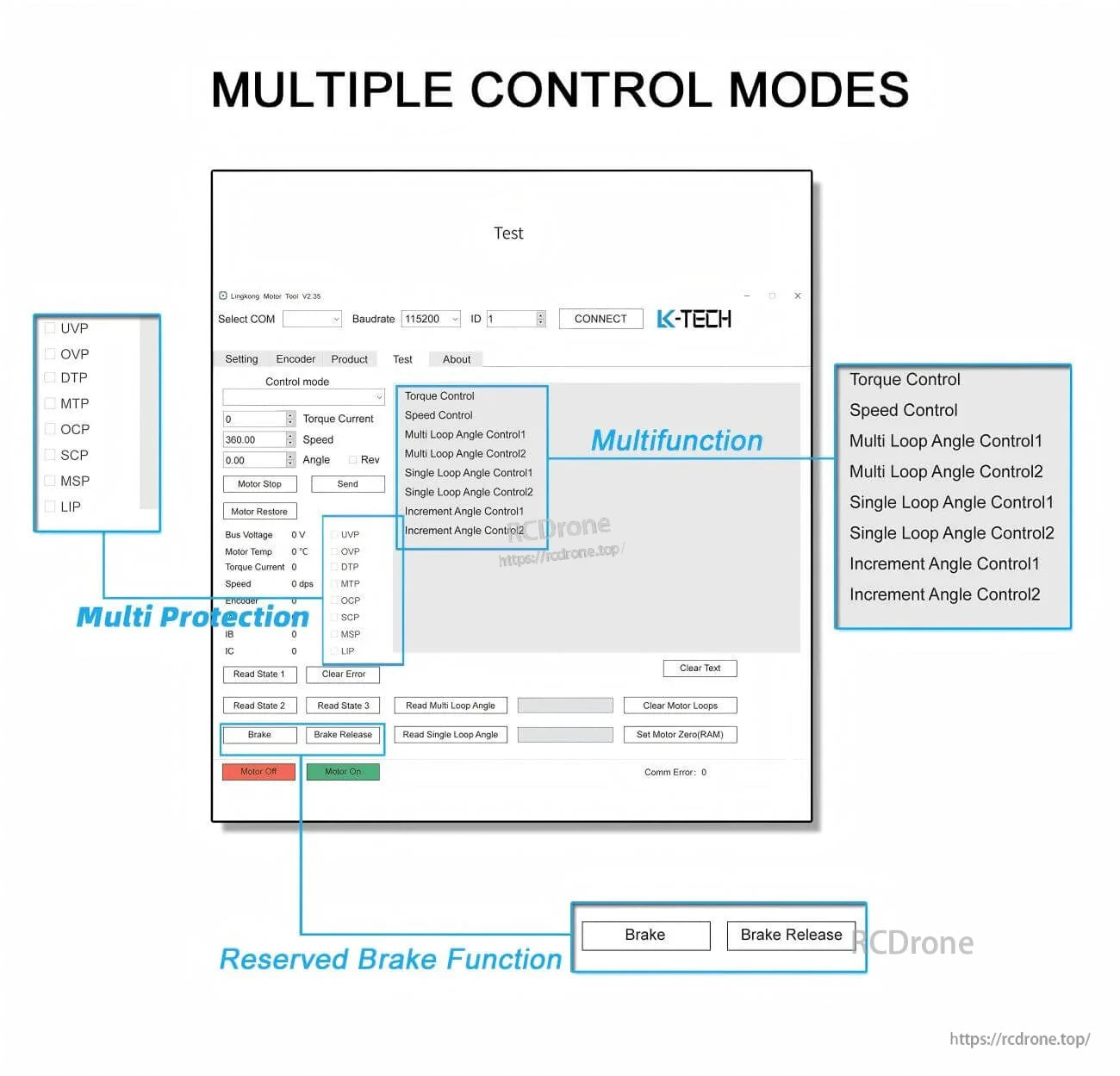
- Njia nyingi za kudhibiti zinasaidiwa: Njia ya Torque, Njia ya Kasi, Njia ya Udhibiti wa Mizunguko Mingi, Njia ya Nafasi ya Mzunguko Mmoja + Mwelekeo, Njia ya Nafasi ya Kuongeza, Njia ya Udhibiti wa Mizunguko Mingi (ikiwa na Kiwango cha Kasi), Njia ya Nafasi ya Mzunguko Mmoja + Mwelekeo (ikiwa na Kiwango cha Kasi), Njia ya Kuongeza Nafasi (ikiwa na Kiwango cha Kasi)
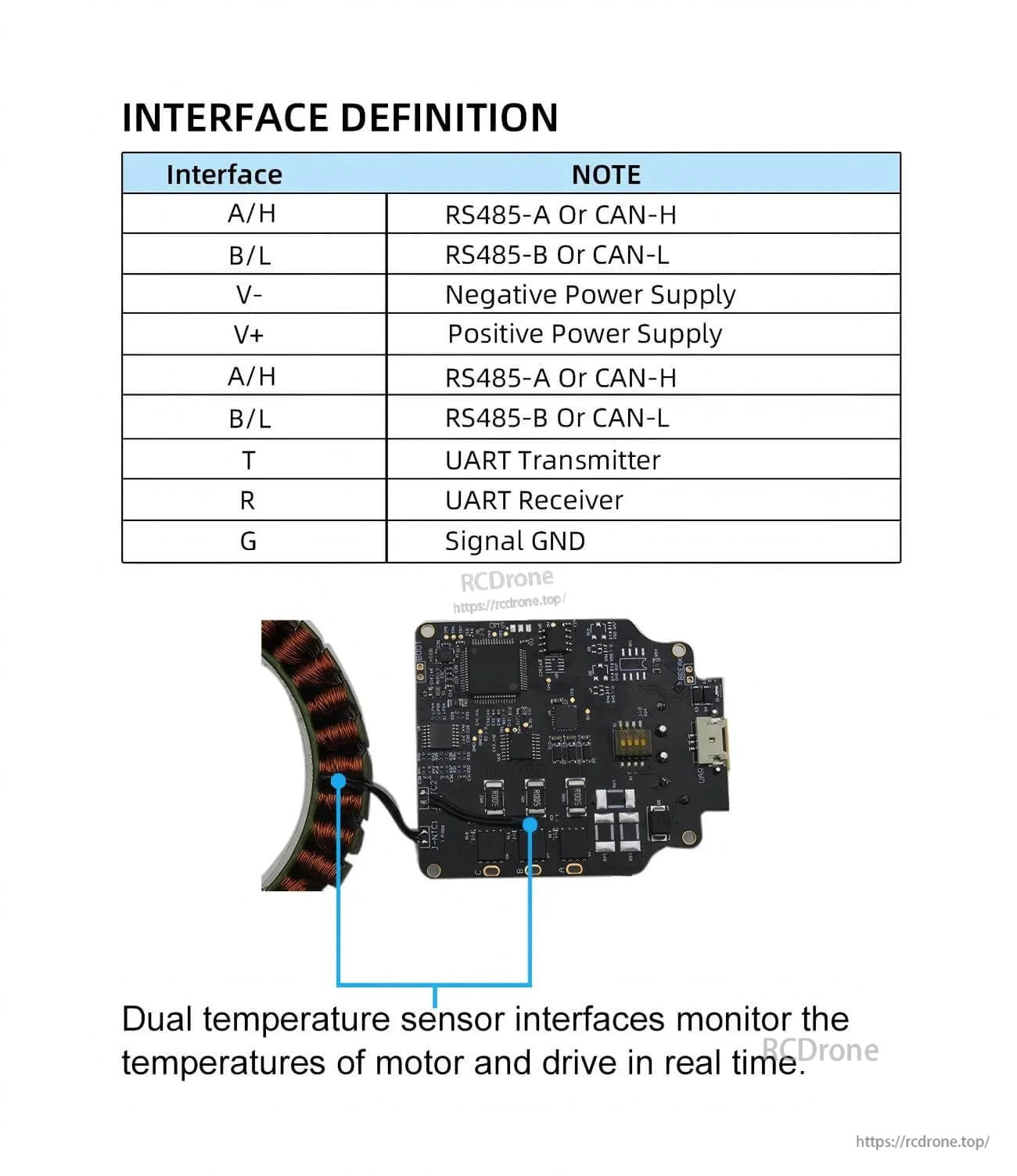
- Interfaces za sensa za joto mbili zinafuatilia joto la motor na kuendesha kwa wakati halisi
- Funguo ya breki iliyohifadhiwa (Breki / Kuachilia Breki)
- Kazi nyingi za ulinzi zimeorodheshwa: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Kwa msaada wa ujumuishaji na uthibitisho wa mauzo kabla, wasiliana na https://rcdrone.top/ au tuma barua pepe [email protected].
Maelezo
| Jina la Kitu | MG4005E-i10-V3 |
| Voltage Iliyoainishwa | 24V |
| Speed ya Juu | 320RPM |
| Torque Iliyoainishwa | 1 N.m |
| Speed Iliyoainishwa | 255RPM |
| Current Iliyoainishwa | 1.8A |
| Power ya Juu | 65W |
| Torque ya Juu | 2.5 N.m |
| Speed ya Kudumu | 106.3rpm/V |
| Torque ya Kudumu | 0.06 N.m/A |
| Zamu | 28 |
| Aina ya Windings | Y |
| Upinzani wa Awamu | 1.4Ω |
| Inductance ya Awamu | 0.5mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 140gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG4210 |
| Uwiano wa Kupunguza | 1:10 |
| Backlash | ≤10 arcmin |
| Mzigo wa Kubeba Ulioidhinishwa | 1000N |
| Uzito wa Motor | 183g |
| Pendekeza Drive | DG40E |
| Voltage ya Kuingiza Drive | 7.4-32V |
| Mawasiliano | RS485 au CAN |
| Masafa ya Mawasiliano | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-bit (motor) + 14-bit (reducer) encoder wa magnetic |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop (24KHz) / Speed Loop (8KHz) / Position Loop (4KHz) |
| Curve ya Kuongeza kasi | Kuongeza kasi ya Trapeziod |
Ufafanuzi wa Kiunganishi
| Kiunganishi | Kumbuka |
|---|---|
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| V- | Ugavi wa Nguvu Mbaya |
| V+ | Ugavi wa Nguvu Nzuri |
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| T | Mtumaji wa UART |
| R | Mpokeaji wa UART |
| G | Signal GND |
Maombi
- Roboti za kibinadamu
- Michemu ya roboti
- Exoskeletons / roboti zinazovaa
- Roboti za mguu nne / mbwa roboti
- Magari ya AGV / gari la AGV
- Roboti za ARU
Maelekezo / Faili
Maelezo

MG4005E-i10-V3 inachanganya motor isiyo na brashi na mchakato wa kupunguza wa sayari katika mfumo mdogo kwa ajili ya viungo vya roboti na aksisi za automatisering.

Vikodi vya magnetic vya dual single-turn absolute vinatoa mrejesho upande wa motor na upande wa matokeo, pamoja na swichi maalum ya ID kwa mipangilio ya basi.
Uunganisho umewekwa rahisi na vituo vilivyo wazi kwa nguvu, mawasiliano ya RS485/CAN, na uhusiano wa ishara za UART.
Motor isiyo na brashi, gia za usahihi za sayari, na udhibiti wa FOC vinasaidia utoaji wa torque laini na udhibiti sahihi wa mwendo.

Dereva inasaidia mawasiliano ya RS485 au CAN na anuwai pana ya voltage ya kuingiza (7.4–32V) kwa uunganisho rahisi.
Programu ya PC inaruhusu kubadilisha vigezo, kupima kazi, na sasisho za firmware wakati wa kuanzisha na matengenezo.
Chagua kutoka kwa njia nyingi za udhibiti kama vile torque, kasi, na udhibiti wa nafasi, huku ikitoa ufuatiliaji wa hali ya ulinzi uliojengwa ndani.
Imeundwa kwa ajili ya uhamasishaji wa kompakt katika roboti za simu, mikono inayoweza kubadilika, wanyama wanne, na roboti zinazovaa.
Related Collections




