




LKMTECH MG4010E-i10-V3 Motor 24V 320RPM 2.5N.m Kipunguza Gia ya Sayari 1:10 RS485/CAN Kichunguzi
LKMTECH MG4010E-i10-V3 Motor 24V 320RPM 2.5N.m Kipunguza Gia ya Sayari 1:10 RS485/CAN Kichunguzi
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG4010E-i10-V3 ni motor isiyo na brashi motor yenye mpunguzaji wa gia wa sayari na vichanganuzi vya sumaku vya uhakika, iliyoundwa kwa ajili ya roboti na actuators za automatisering zinazohitaji usahihi wa juu, torque kubwa, na udhibiti thabiti wa mzunguko ulifungwa. Inasaidia mawasiliano ya RS485 au CAN bus na inafanya kazi na dereva iliyo pendekezwa ya DG40E (volti ya kuingiza 7.4-32V).
Vipengele Muhimu
- Muundo wa kiwango cha juu; nguvu kubwa, torque kubwa, usahihi wa juu
- Motor isiyo na brashi yenye nguvu kubwa + reducer ya gia ya sayari yenye usahihi wa juu
- Udhibiti wa utendaji wa juu wa FOC (kipengele kinachohusiana na kuendesha)
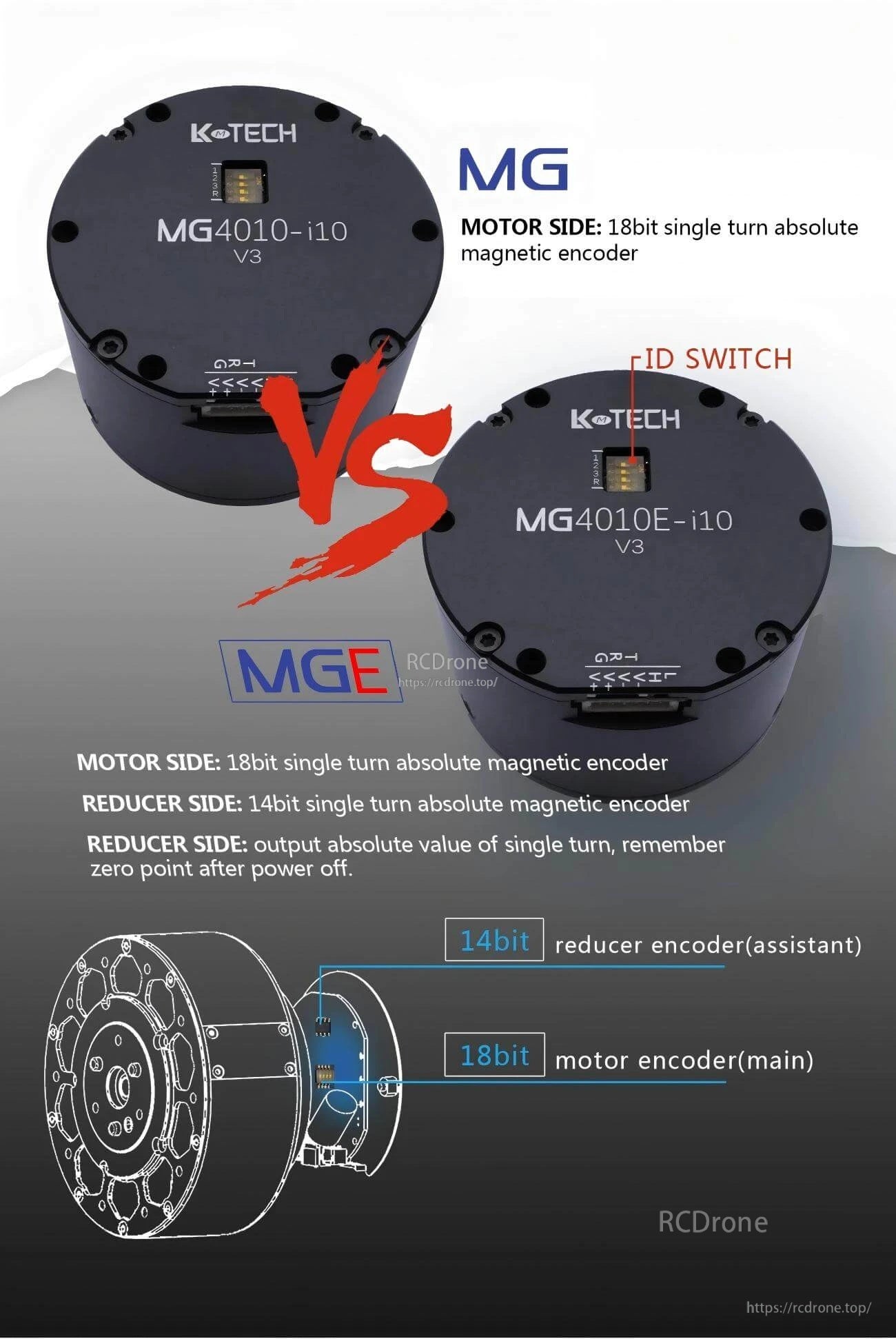
- Encoders mbili; inakumbuka pointi sifuri baada ya kuzima (toleo la thamani halisi kwa mzunguko mmoja)
- Encoder upande wa motor: encoder ya magnetic ya mzunguko mmoja ya 18-bit
- Encoder upande wa reducer: encoder ya magnetic ya mzunguko mmoja ya 14-bit
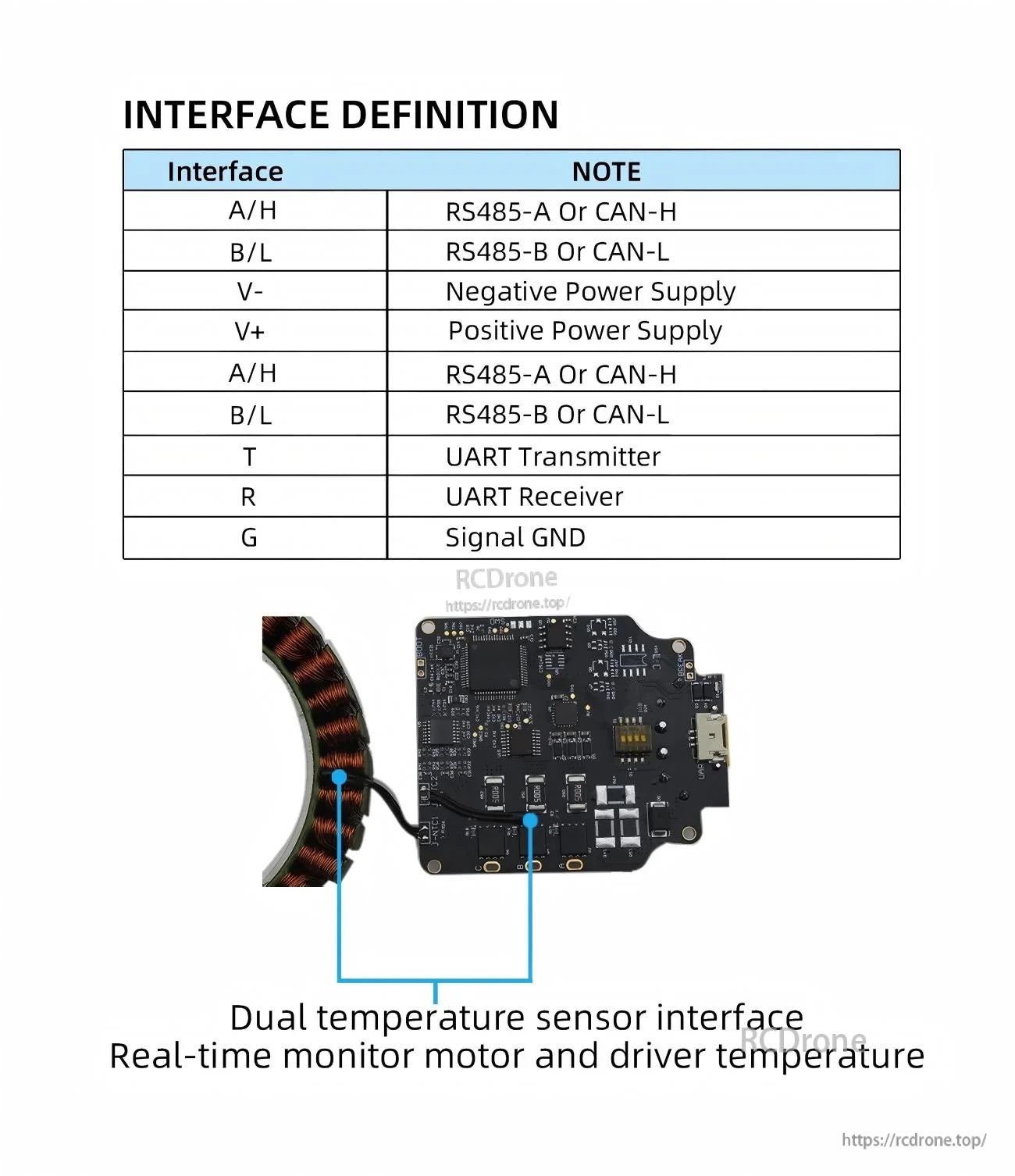
- Kiunganishi cha sensorer mbili za joto kwa ufuatiliaji wa wakati halisi wa joto la motor na dereva (joto la motor: NDIYO)
- Swichi ya ID (imeonyeshwa kwenye nyumba ya motor)
Maelezo ya Bidhaa
| Jina la Kitu | MG4010E-i10-V3 |
| Voltage Iliyoainishwa | 24V |
| Speed ya Juu | 320RPM |
| Speed Iliyoainishwa | 260RPM |
| Torque iliyopewa | 2.5N.m |
| Max Torque | 4.5N.m |
| Rated Current | 3.5A |
| Max Power | 140W |
| Speed constant | 108.3rpm/V |
| Torque Constant | 0.07N.m/A |
| Turns | 14 |
| Winding Type | Y |
| Phase Resistance | 0.604Ω |
| Phase Inductance | 0.28mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 202gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG4210 |
| Uwiano wa Kupunguza | 1:10 |
| Backlash | ≤8 arcmin (picha ya maandiko pia inasema: backlash ya gia 6 arcmin) |
| Mzigo wa Kuboreshwa wa Bearing | 1000N |
| Uzito wa Motor | 250g |
| Ukubwa | Φ53*41 |
| Pendekeza Drive | DG40E |
| Voltage ya Kuingiza Drive | 7.4-32V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Magnetic Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(24KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Kuongeza mwelekeo | Kuongeza trapezoid |
Maelezo ya Kiunganishi
| A/H | RS485-A Au CAN-H |
| B/L | RS485-B Au CAN-L |
| V- | Chanzo cha Nguvu Chini |
| V+ | Nguvu Chanya |
| A/H | RS485-A Au CAN-H |
| B/L | RS485-B Au CAN-L |
| T | Transmitter wa UART |
| R | Receiver wa UART |
| G | Signal GND |
Matukio ya Maombi
- Roboti za Binadamu
- Micuku ya Roboti
- Exoskeletons
- Roboti Wanne
- Magari ya AGV / gari la AGV
- Roboti za ARU
- Mbwa wa Roboti
- Roboti Inayovaa
Kwa maswali ya uunganisho (mipangilio ya RS485/CAN, uchaguzi wa kiwango cha baud cha encoder, au mechi ya kuendesha), wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelekezo
Maelezo

Imetengenezwa kwa ajili ya actuators za roboti zinazohitaji torque kubwa, usahihi wa juu, na udhibiti thabiti wa mzunguko ulifungwa.

Mawasiliano ya RS485 au CAN bus inasaidia uunganisho rahisi na wasimamizi wa roboti na drives za kawaida.
Encoders mbili za absolute (motor + reducer) husaidia kuhifadhi pointi sifuri baada ya kuzima umeme kwa ajili ya upimaji wa kurudiwa.
Mafafaniko ya pini yanafanya iwe rahisi kuunganisha nguvu na kuchagua mawasiliano ya RS485/CAN wakati wa uunganisho.

Reducer ya sayari ya 1:10 imeboreshwa kwa ajili ya kutoa torque ya kompakt katika nafasi za actuator zilizofungwa.
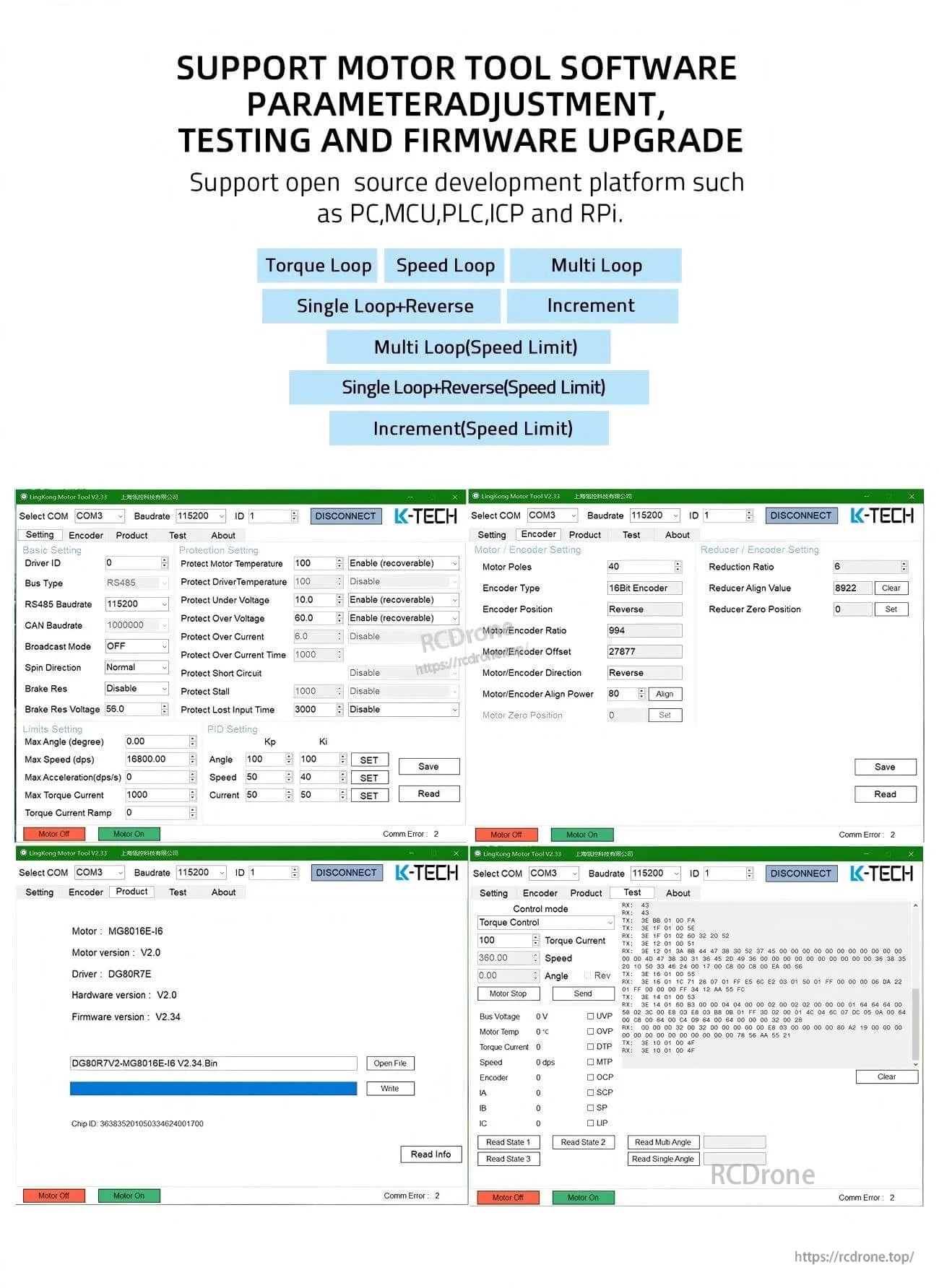
Programu ya zana ya PC inasaidia tuning ya parameta, upimaji wa kazi, na masasisho ya firmware wakati wa kuanzisha.
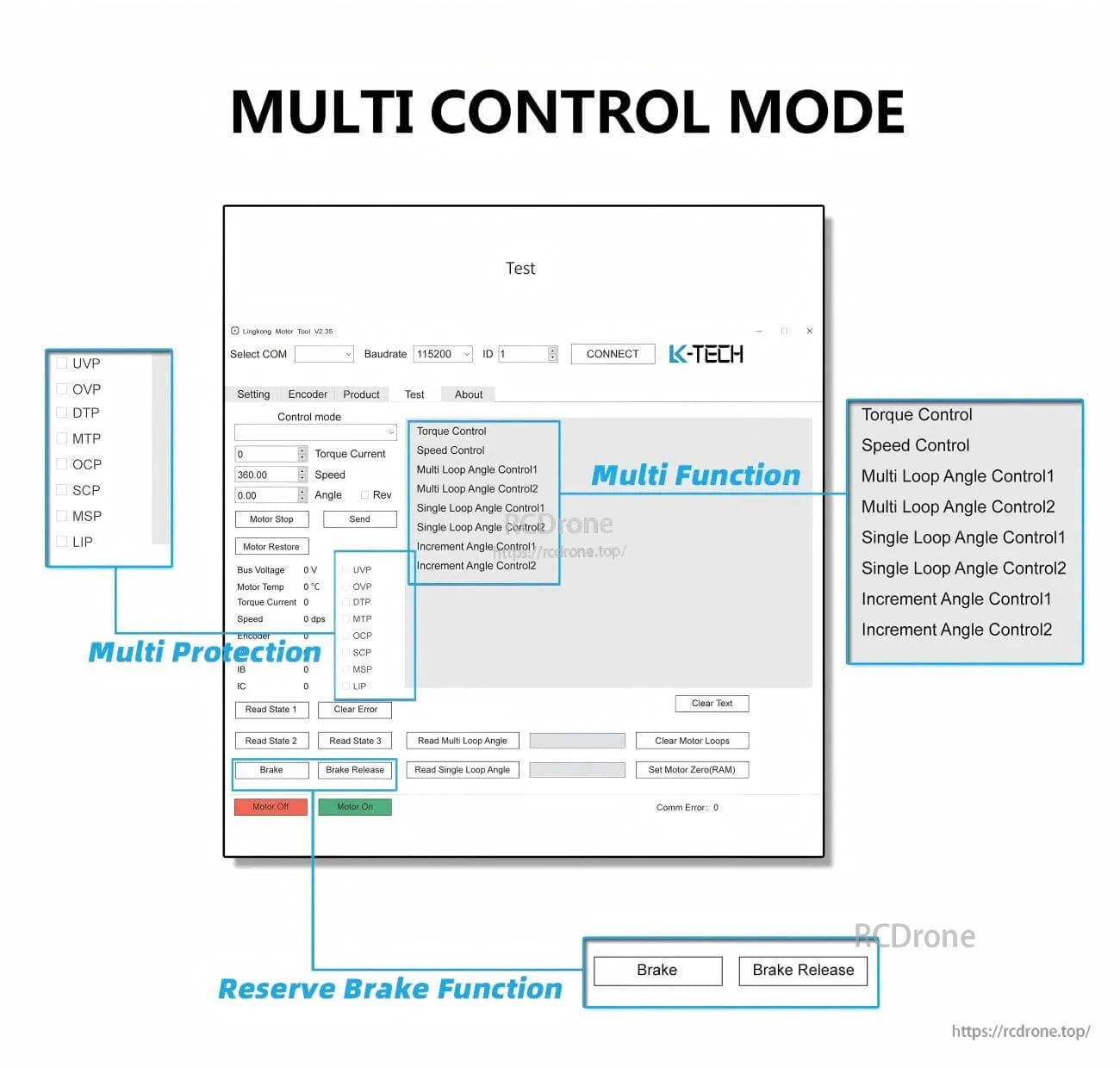
Njia nyingi za udhibiti na chaguzi za ulinzi zinasaidia mzunguko wa torque, kasi, na nafasi.
Inafaa kwa AGVs, mikono ya roboti, wanyama wanne, na viungo vya roboti vinavyovaa ambapo usahihi wa gia na mrejesho vinahitajika.
Related Collections




