




LKMTECH MG4010E-i10B-V3 Motoru wa Gia ya Sayari na Breki, 24V 320RPM, RS485/CAN, Kichunguzi cha 18bit
LKMTECH MG4010E-i10B-V3 Motoru wa Gia ya Sayari na Breki, 24V 320RPM, RS485/CAN, Kichunguzi cha 18bit
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG4010E-i10B-V3 ni motor ya gia ya sayari yenye breki, iliyoundwa kwa ajili ya roboti na actuators za automatisering ambazo zinahitaji ukubwa mdogo, pato la torque lililopangwa, na mawasiliano ya fieldbus (RS485 au CAN). Inatumia encoder ya magnetic ya 18bit na inasaidia mizunguko ya udhibiti wa torque, kasi, na nafasi.
Vipengele Muhimu
- Ngazi mbili zenye breki motor ya gia ya sayari (mfululizo wa MG4010E-i10B)
- Uwiano wa gia: 1:10; Backlash ya gia: 8 arcmin (pia imeainishwa kama ≤8 arcmin)
- Encoder ya magnetic ya 18bit ya mzunguko mmoja (encoder ya magnetic ya 18bit)
- Mawasiliano: RS485 au CAN
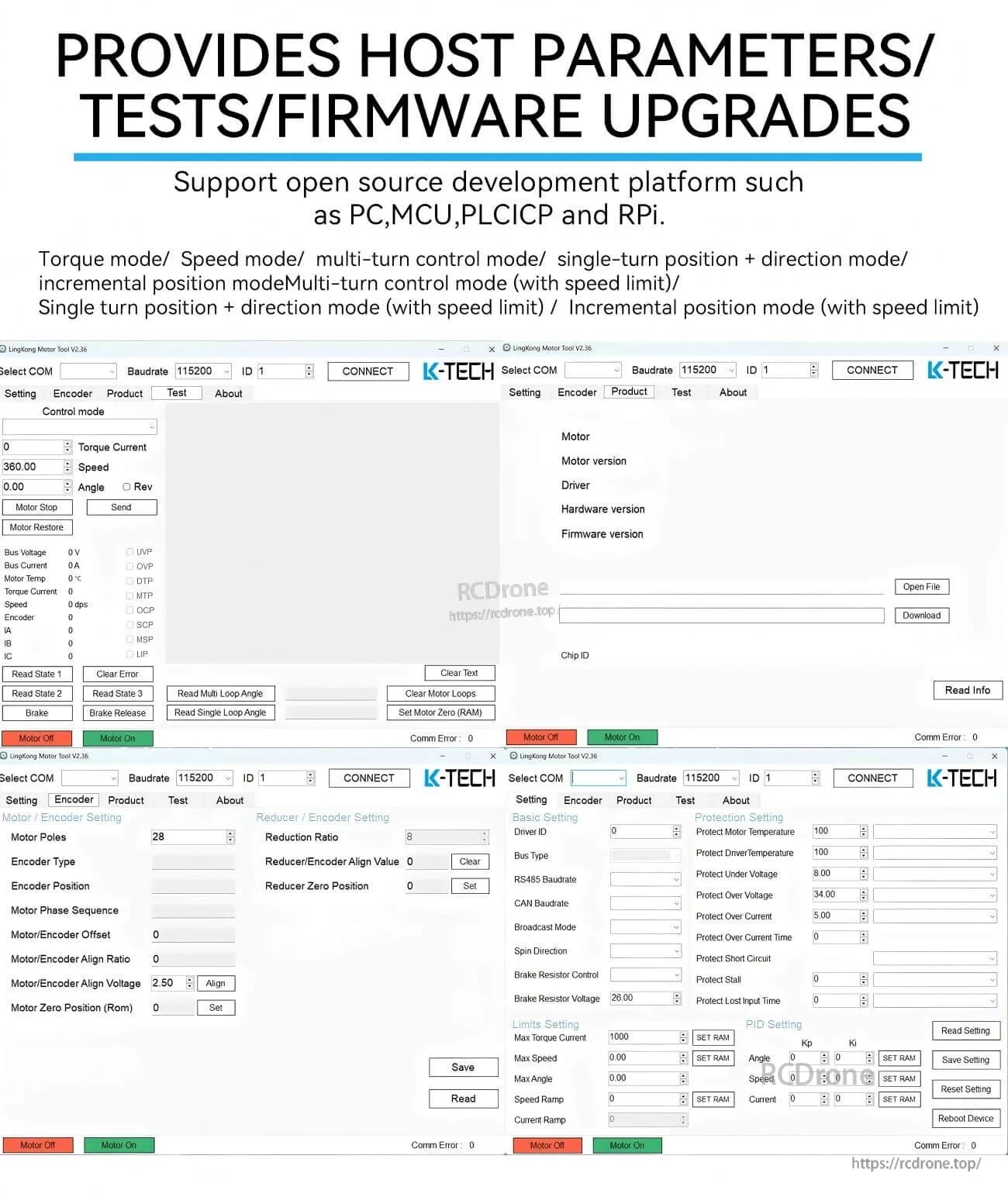
- Njia/mazunguko ya udhibiti: Mzunguko wa Torque (32KHz) / Mzunguko wa Kasi (8KHz) / Mzunguko wa Nafasi (4KHz)
- Curve ya kuongezeka: Kuongezeka kwa trapezoid
- Breki iliyojengwa ndani; Aina ya breki BG4906; Torque ya breki 3.2 N.m
- Vipengele vya interface: Switch ya ID
- Maandishi yanayohusiana na kuendesha: Breki iliyojengwa; Mawasiliano ya RS485 au CAN bus; Encoders mbili, kumbuka pointi sifuri baada ya kuzima; Voltage ya ingizo 12-60V
Maelezo ya bidhaa
| Jina la Kitu | MG4010E-i10B-V3 |
| Voltage iliyoainishwa | 24V |
| Speed ya Juu | 320RPM |
| Speed iliyoainishwa | 260RPM |
| Torque iliyoainishwa | 2.5N.m |
| Torque ya Juu | 4.5N.m |
| Current iliyoainishwa | 3.5A |
| Power ya Juu | 140W |
| Speed ya kudumu | 108.3rpm/V |
| Torque ya kudumu | 0.07N.m/A |
| Inageuza | 14 |
| Aina ya Kizunguzungu | Y |
| Upinzani wa Awamu | 0.604Ω |
| Induktansi ya Awamu | 0.28mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 202gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG4210 |
| Uwiano wa Kupunguza | 1:10 |
| Backlash | ≤8 arcmin |
| Mzigo wa Kadirio la Kijiko | 1000N |
| Uzito wa Motor | 392g |
| Aina ya Breki | BG4906 |
| Torque ya Breki (N.m) | 3.2N.m |
| Voltage ya Kuanzisha (V) | 24V |
| Voltage ya Kudumisha (V) | 7V |
| Power ya Kudumisha (W) | 1.4W |
| Pendekeza Drive | DG40 |
| Voltage ya Kuingiza Drive | 7.4-32V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit Magnetic Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Curve ya Kuongeza Kasi | Kuongeza kasi ya Trapeziod |
| Ukubwa wa Motor | Φ 59*37 |
| Gear backlash | 8 arcmin |
Maelezo ya Kiunganishi
- ID switch
| Bandari | Maagizo |
|---|---|
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| V- | Ugavi wa Nguvu Mbaya |
| V+ | Ugavi wa Nguvu Nzuri |
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| T | Transmitter wa UART |
| R | Receiver wa UART |
| G | Signal GND |
Maombi
- Roboti za Binadamu
- Micuku ya Roboti
- Exoskeletons / roboti ya exoskeleton
- Roboti za Quadruped / Mbwa wa Mecha
- Magari ya AGV / gari la AGV
- Roboti za ARU
- Roboti ya huduma
- Lidar ya mkono
- Roboti ya mafunzo ya urejeleaji
- Roboti ya ukaguzi
Maelekezo
Kwa msaada wa uunganisho na maswali ya kabla ya mauzo, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo

Motor ya MG4010E-i10B-V3 yenye gia za sayari, compact, motor yenye breki iliyojumuishwa, kupunguza 1:10 na ≤8 arcmin backlash kwa viungo vya roboti sahihi.
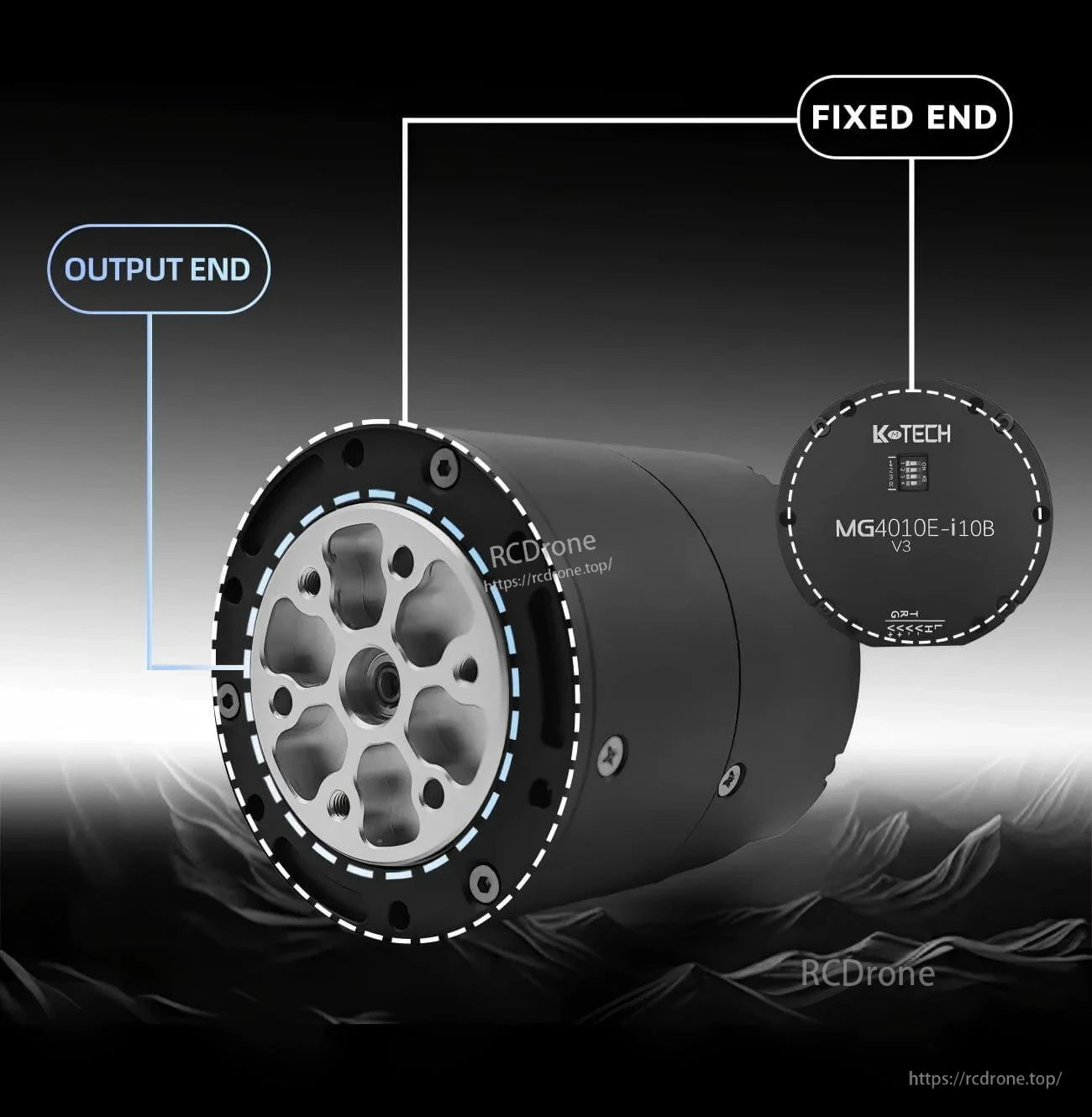
Utambulisho wazi wa mwisho wa pato dhidi ya mwisho uliofungwa husaidia kurahisisha mpangilio wa mitambo na mwelekeo wa wiring wakati wa kuunganisha.

Encoder ya magnetic absolute ya mzunguko mmoja ya 18-bit na msaada wa RS485/CAN bus inasaidia udhibiti wa torque, kasi, na nafasi kwa actuators za automatisering.
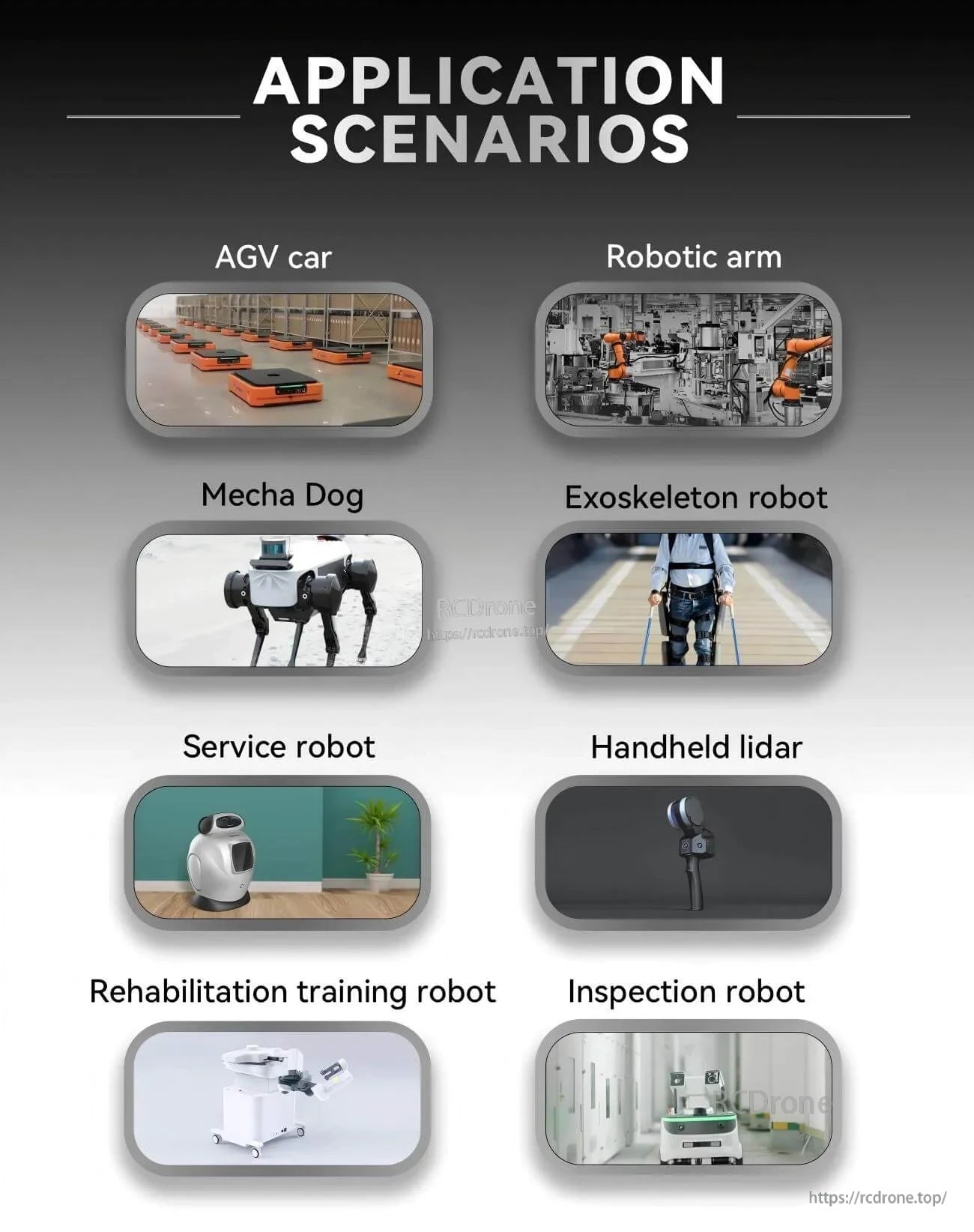
Imepangwa kwa matumizi ya roboti na automatisering ikiwa ni pamoja na AGVs, mikono ya roboti, roboti za mguu nne, exoskeletons, na majukwaa ya ukaguzi.
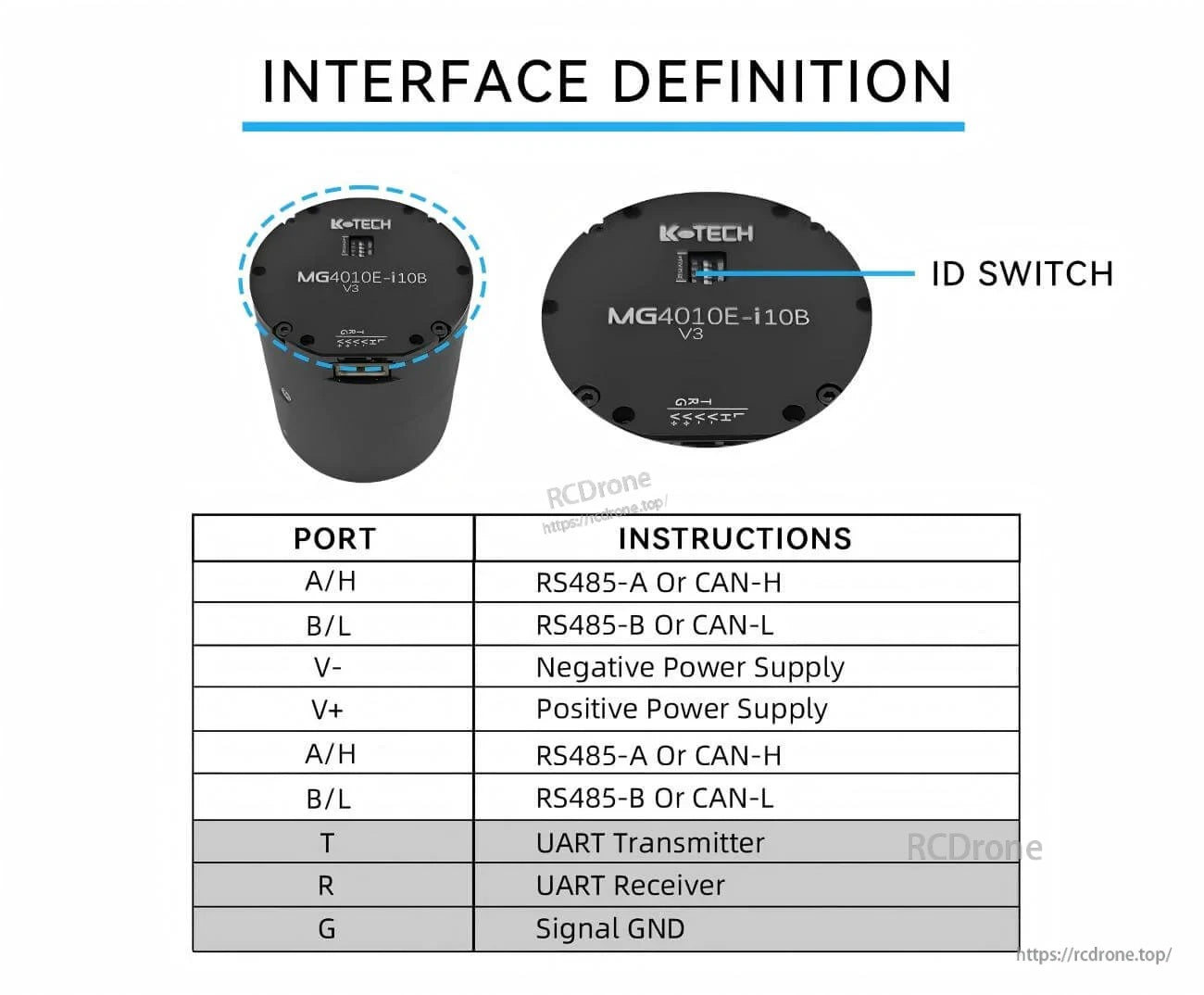
Mipangilio ya bandari inajumuisha RS485-A/CAN-H na RS485-B/CAN-L, pamoja na nguvu, UART TX/RX, ardhi ya ishara, na swichi ya ID iliyojumuishwa.

Related Collections




