




LKMTECH MG4010E-i36-V3 Motoru wa Gia ya Sayari 24V 1:36 RS485/CAN Kichunguzi cha Sumaku kwa Roboti
LKMTECH MG4010E-i36-V3 Motoru wa Gia ya Sayari 24V 1:36 RS485/CAN Kichunguzi cha Sumaku kwa Roboti
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG4010E-i36-V3 ni motor ya gia ya sayari iliyoundwa kwa ajili ya roboti na actuators za kudhibiti mwendo. Inachanganya motor isiyo na brashi, reducer ya sayari, na encoder ya sumaku, ikiwa na chaguo za mawasiliano zilizoorodheshwa kama RS485 au CAN.
Vipengele Muhimu
- Motor ya gia ya sayari (MG4010E-i36, V3).
- Uwiano wa gia: 1:36 (pia inaonyeshwa kama “Uwiano wa gia 1:36”).
- Kurudi kwa gia: 7 arcmin (lebo ya picha) / 12 arcmin (meza ya vipimo).
- Encoder: 18bit ya mzunguko mmoja wa encoder ya sumaku ya kweli (maandishi ya picha); pia imeorodheshwa kama 18bit (motor) + 14bit (reducer) encoder ya sumaku (meza ya vipimo).
- Mawasiliano: RS485 au CAN.
- Dereva wa Drive/FOC uliotajwa (maandishi ya picha: “Dereva wa FOC wa utendaji wa juu”).
- Breki iliyojengwa ndani (maandishi ya picha/lebo ya UI).
- Parameta za mwenyeji/testi/upgrades za firmware zinasaidiwa (maandishi ya picha).
Maelezo
| Jina la Kitu | MG4010E-i36-V3 |
| Voltage Iliyoainishwa | 24V |
| Speed ya Juu | 90RPM |
| Speed Iliyoainishwa | 77RPM |
| Current Iliyoainishwa | 2.4A |
| Power ya Juu | 132W |
| Torque Iliyoainishwa | 6 N.m (meza ya specs) / 9 N.m (lebo ya picha) |
| Torque ya Juu | 13 N.m (meza ya specs) / 18 N.m (lebo ya picha) |
| Speed ya Kudumu | 3 rpm/V |
| Torque ya Kudumu | 2.58 N.m/A |
| Zamu | 14 |
| Aina ya Winding | Y |
| Upinzani wa Awamu | 0.68 Ω |
| Indukta ya Awamu | 0.25 mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 158 gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG5336 |
| Uwiano wa Kupunguza | 1:36 |
| Backlash | ≤12 arcmin (meza ya spesifiki) / 6 arcmin (lebo ya picha) |
| Mzigo wa Kubeba Ulioidhinishwa | 1120 N |
| Uzito wa Motor | 378 g |
| Pendekeza Drive | DG40E |
| Voltage ya Ingizo la Drive | 12-24V (meza ya spesifiki) / 12-60V (lebo ya picha) |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motor) + 14bit (reducer) Magnetic Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Control Mode | Torque Loop (24 KHz) / Speed Loop (8 KHz) / Position Loop (4 KHz) |
| Acceleration curve | Trapeziod acceleration |
| Motor Size | Φ 53*54.5 (image label) |
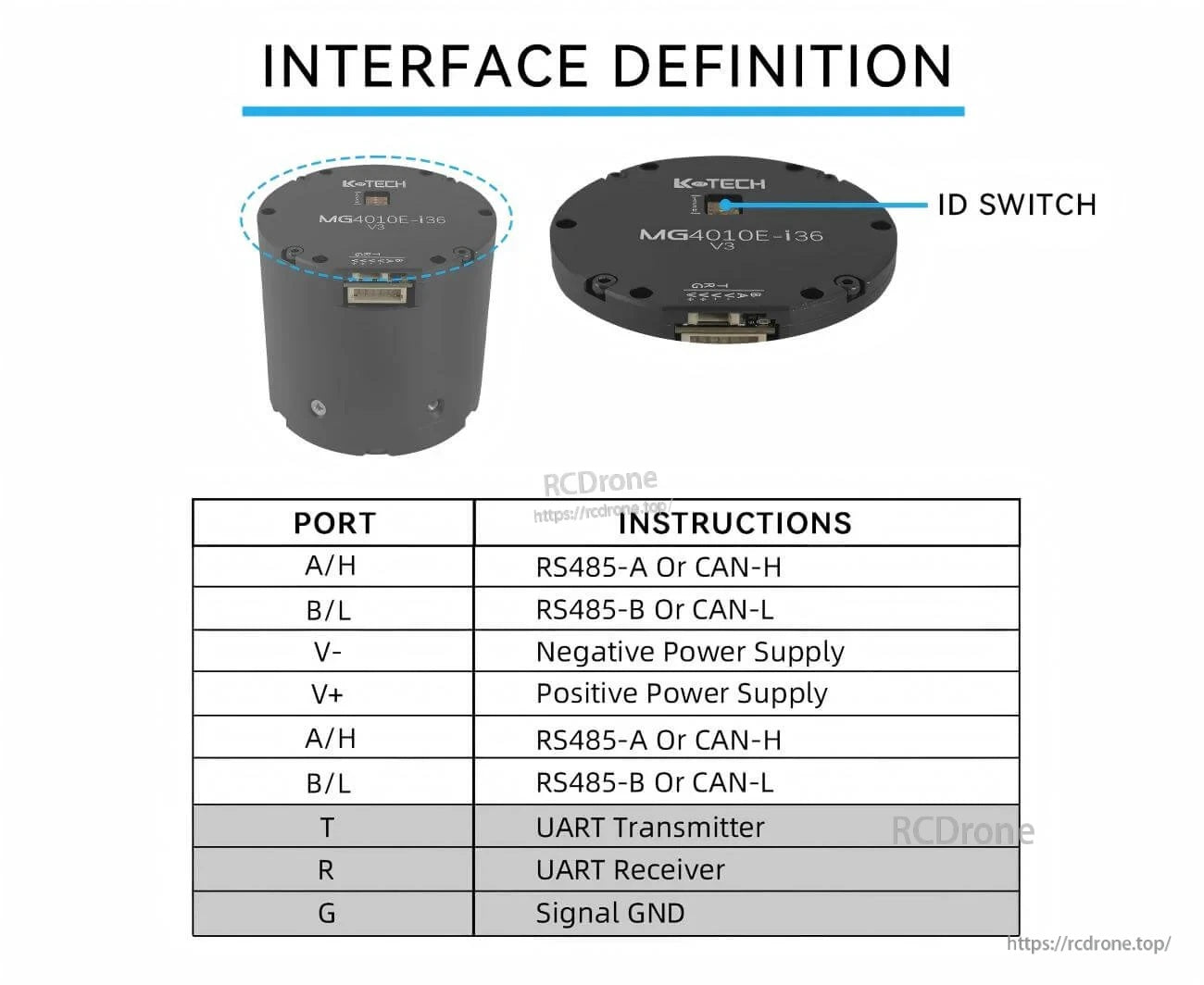
Maelezo ya Kiunganishi
- Swichi ya ID (image label: “ID SWITCH”).
| Bandari | Maelekezo |
|---|---|
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| V- | Chanzo cha Nguvu Mbaya |
| V+ | Chanzo cha Nguvu Nzuri |
| T | Mtumaji wa UART |
| R | Mpokeaji wa UART |
| G | GND ya Ishara |
Matukio ya Maombi
- Roboti za Binadamu
- Michemu ya Roboti
- Exoskeletons
- Roboti wa Nguvu Nne
- Magari ya AGV / gari la AGV
- Roboti za ARU
- Mbwa wa Mecha
- Roboti ya Huduma
- Lidar ya Mkono
- Roboti wa mafunzo ya Urekebishaji
- Roboti wa Ukaguzi
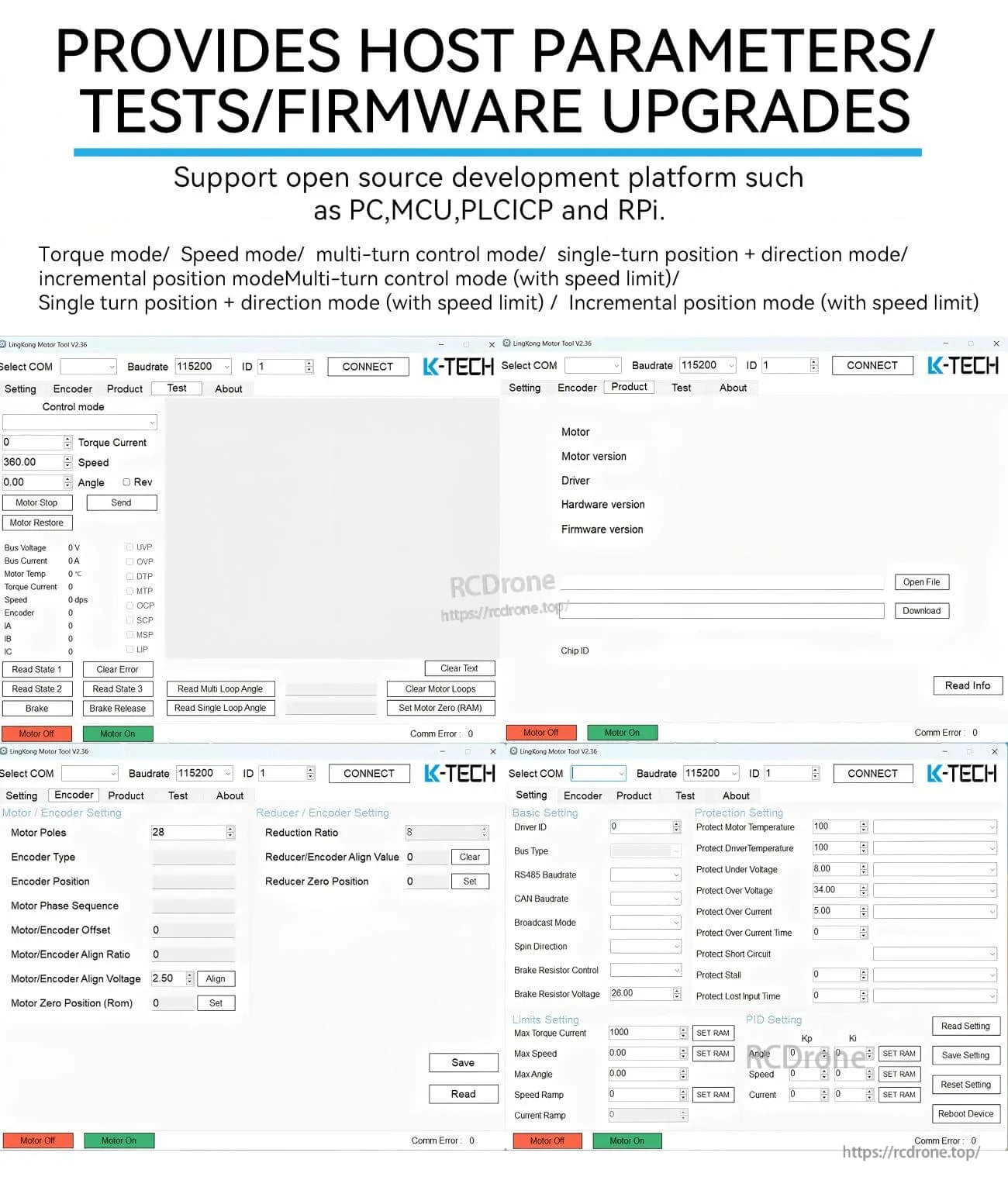
Udhibiti & Maelezo ya Programu
- Inasaidia majukwaa ya maendeleo ya chanzo wazi kama PC, MCU, PLC, ICP, na RPi.
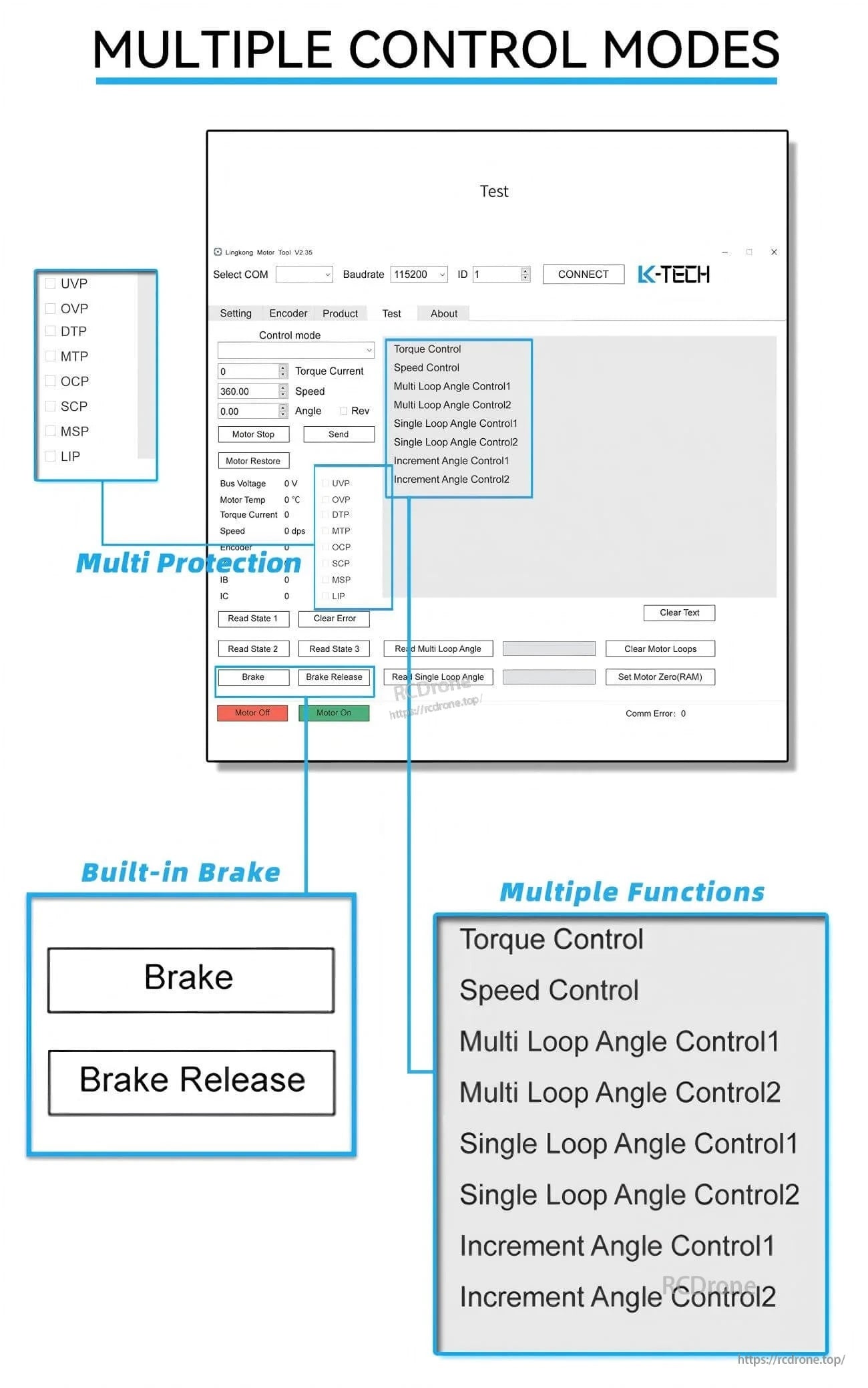
- Modes zilizoorodheshwa (maandishi ya picha): Hali ya Torque, Hali ya Kasi, hali ya udhibiti wa mizunguko mingi, hali ya nafasi ya mzunguko mmoja + mwelekeo, hali ya nafasi ya ongezeko; toleo zenye kikomo cha kasi pia zinaonyeshwa.
- Njia nyingi za udhibiti zinaonyeshwa katika UI: Udhibiti wa Torque, Udhibiti wa Kasi, Udhibiti wa Mzunguko wa Angle1, Udhibiti wa Mzunguko wa Angle2, Udhibiti wa Mzunguko wa Angle Mmoja1, Udhibiti wa Mzunguko wa Angle Mmoja2, Udhibiti wa Angle ya Ongezeko1, Udhibiti wa Angle ya Ongezeko2.
- Lebo za ulinzi nyingi zinaonyeshwa: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Udhibiti wa breki uliojengwa ndani unaonyeshwa: Breki, Kuachia Breki.
Kwa ukaguzi wa ulinganifu kabla ya mauzo (ujumuishaji wa RS485/CAN, uchaguzi wa kiwango cha baud) au msaada wa ufikiaji wa faili, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Mwongozo / Hati
Maelezo

MG4010E-i36-V3 inachanganya motor isiyo na brashi, reducer ya sayari, na encoder ya sumaku kwa actuators za roboti za kompakt.
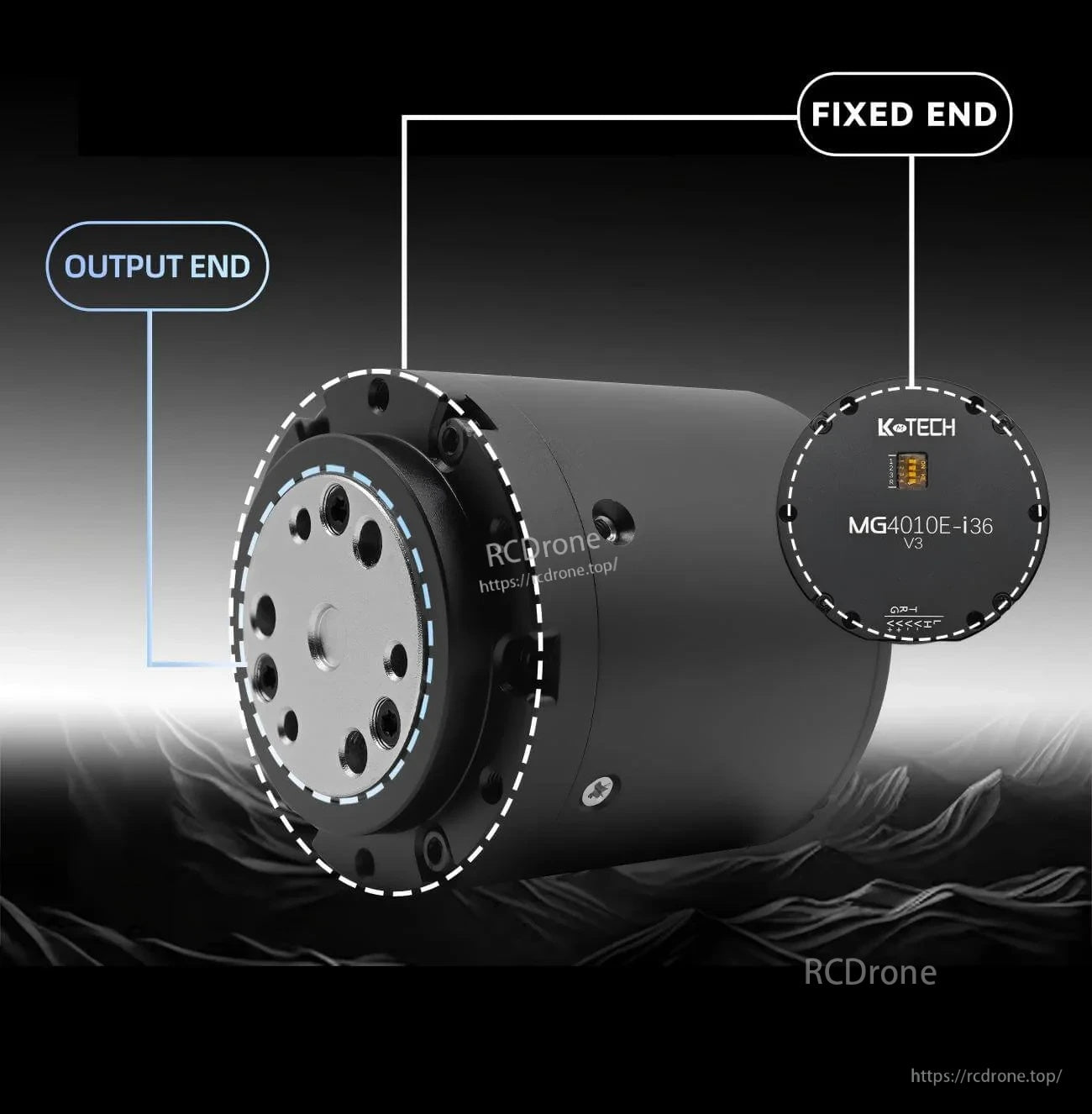
Muundo wa mwisho wa flange na mpangilio wa mwisho ulioimarishwa unafanya kuunganishwa kuwa rahisi katika mikono, miguu, na moduli nyingine za viungo.

Mawasiliano ya RS485 au CAN yanashirikiana na dereva wa FOC na mrejesho wa encoder ya sumaku ya hakika kwa udhibiti thabiti wa torque, kasi, na nafasi.
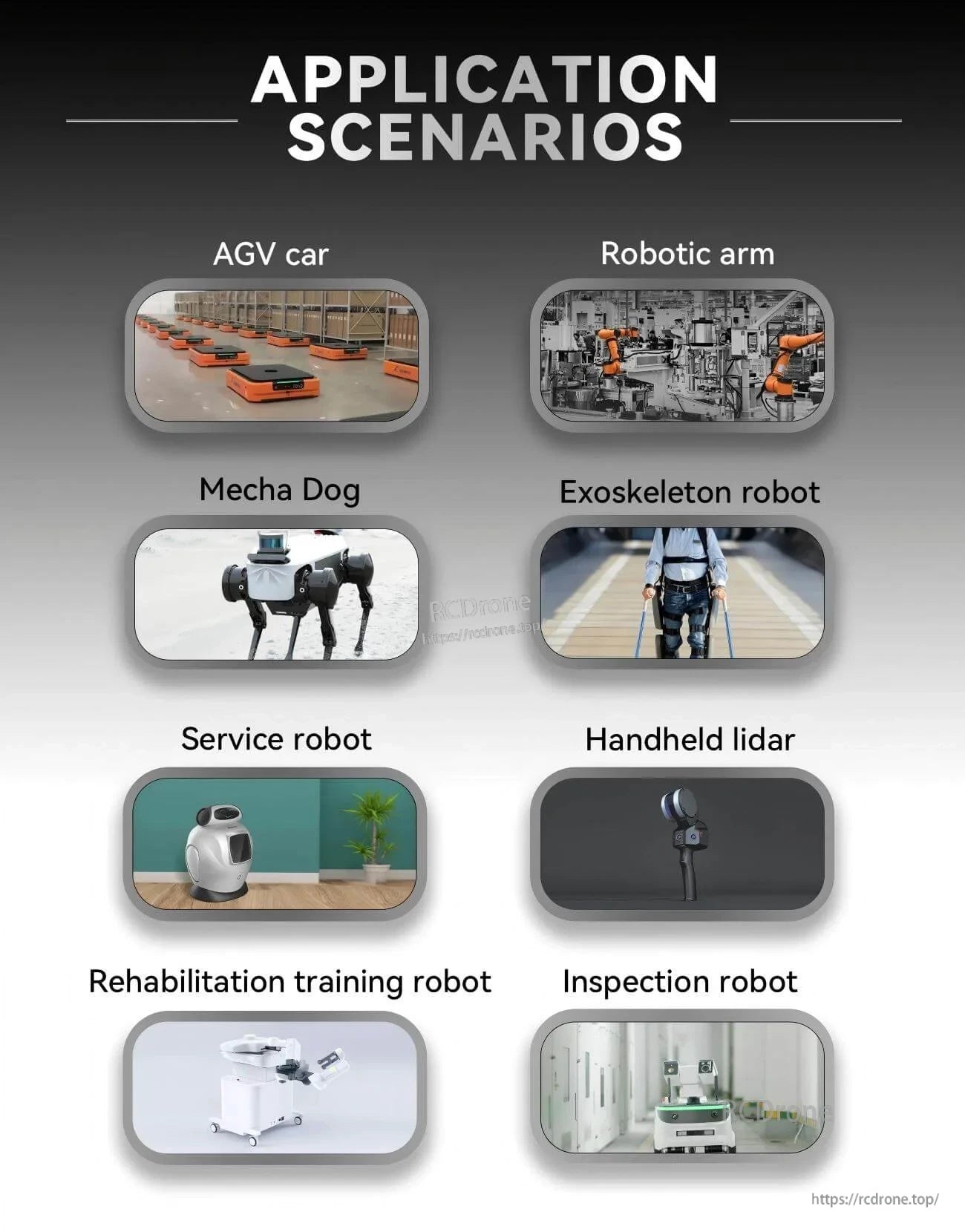
Matumizi ya kawaida ni pamoja na AGVs, mikono ya roboti, majukwaa ya wanyama wanne, exoskeletons, na roboti za ukaguzi au huduma.
Uunganisho umewekwa rahisi kwa pini za RS485/CAN bus zilizoandikwa, viunganishi vya nguvu, UART Tx/Rx, ardhi ya ishara, na swichi ya ID iliyopo kwenye bodi.
Udhibiti wa breki uliojengwa ndani na njia nyingi za uendeshaji husaidia kuboresha tabia kwa kazi tofauti za kudhibiti mwendo na mahitaji ya usalama.
Related Collections




