




LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Gia la Sayari yenye Breki, RS485/CAN, Kichunguzi cha Sumaku
LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Gia la Sayari yenye Breki, RS485/CAN, Kichunguzi cha Sumaku
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG4010E-i36B-V3 ni motor ya gia ya sayari yenye breki iliyounganishwa na mrejesho wa encoder, iliyoundwa kwa ajili ya uendeshaji wa roboti ambapo udhibiti sahihi wa torque/kasi/nafasi na uunganisho wa kompakt unahitajika. Inasaidia mawasiliano ya RS485 au CAN na imeainishwa na mpunguzaji wa PG4210 (1:36) na encoder ya sumaku ya pande mbili (motor ya 18-bit + mpunguzaji wa 14-bit).
Vipengele Muhimu
- Mpunguzaji wa sayari: PG4210, uwiano wa kupunguza 1:36, backlash ≤12 arcmin
- Encoder: 18-bit (motor) + 14-bit (mpunguzaji) encoder ya sumaku
- Mawasiliano: RS485 au CAN
- Miduara ya udhibiti: Miduara ya Torque (32KHz) / Miduara ya Kasi (8KHz) / Miduara ya Nafasi (4KHz)
- Curve ya kasi: Kasi ya trapezoid
- Breki: BG4906, torque ya breki 0.6N.m
- Joto la motor: NDIYO
Maelezo ya Kiufundi
| Jina la Kitu | MG4010E-i36B-V3 |
| Voltage Iliyoainishwa | 24V |
| Speed ya Juu | 90RPM |
| Speed Iliyoainishwa | 77RPM |
| Torque Iliyoainishwa | 6N.m |
| Torque ya Juu | 13N.m |
| Current Iliyoainishwa | 2.4A |
| Nguvu ya Juu | 132W |
| Speed ya Kawaida | 3rpm/V |
| Torque ya Kawaida | 2.58N.m/A |
| Zunguka | 14 |
| Aina ya Winding | Y |
| Upinzani wa Awamu | 0.68Ω |
| Inductance ya Awamu | 0.25mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 158gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG4210 |
| Uwiano wa Kupunguza | 1:36 |
| Backlash | ≤12 arcmin |
| Mzigo wa Kubeba Ulioidhinishwa | 1120N |
| Uzito wa Motor | 542.5g |
| Aina ya Breki | BG4906 |
| Torque ya Breki (N.m) | 0.6N.m |
| Voltage ya Kuanzisha (V) | 24V |
| Voltage ya Kudumisha (V) | 7V |
| Nguvu ya Kudumisha (W) | 1.4W |
| Pendekeza Drive | DG40E |
| Voltage ya Kuingiza Drive | 7.4-32V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer) Magnetic Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Curve ya Kuongeza Kasi | Kuongeza kasi ya Trapeziod |
Ufafanuzi wa Kiunganishi (Ports)
Maana za Port zinaonyeshwa kwa mfululizo huu wa motor:
- A/H: RS485-A au CAN-H
- B/L: RS485-B au CAN-L
- V-: Ugavi wa Nguvu Mbaya
- V+: Ugavi wa Nguvu Nzuri
- T: Mhamasishaji wa UART
- R: Mpokeaji wa UART
- G: Ishara GND
- Swichi ya ID
Maombi
- Roboti za kibinadamu
- Michemu ya roboti
- Exoskeletons
- Roboti za mguu nne
- Magari ya AGV
- Roboti za ARU
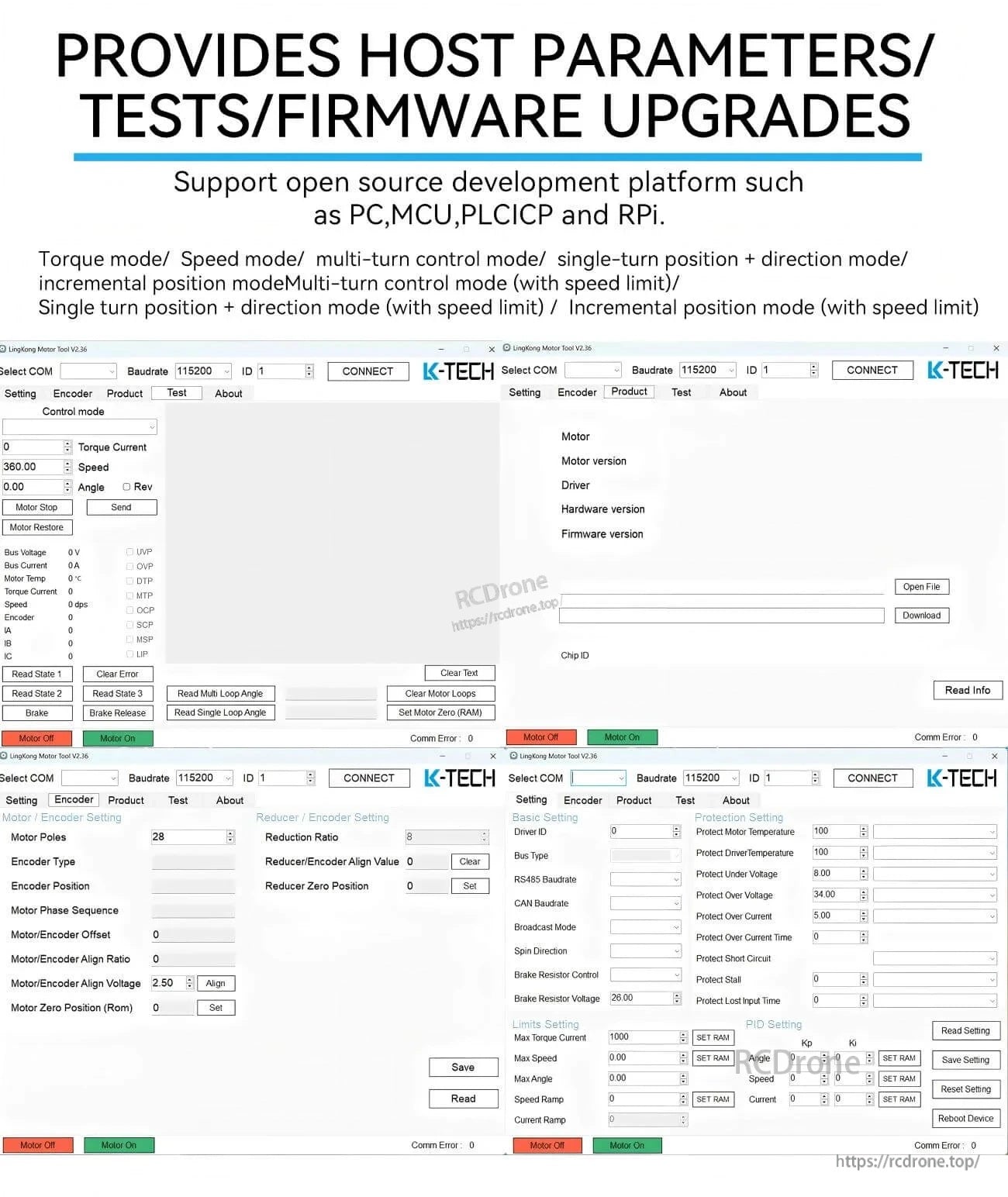
Maelekezo / Nyaraka
Kwa msaada wa uunganisho na ukaguzi wa ufanisi kabla ya mauzo, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo

Muili wa motor ya gia ya sayari yenye ukubwa mdogo unachanganya breki na kiunganishi cha ndani katika kifurushi kimoja cha kikundi.
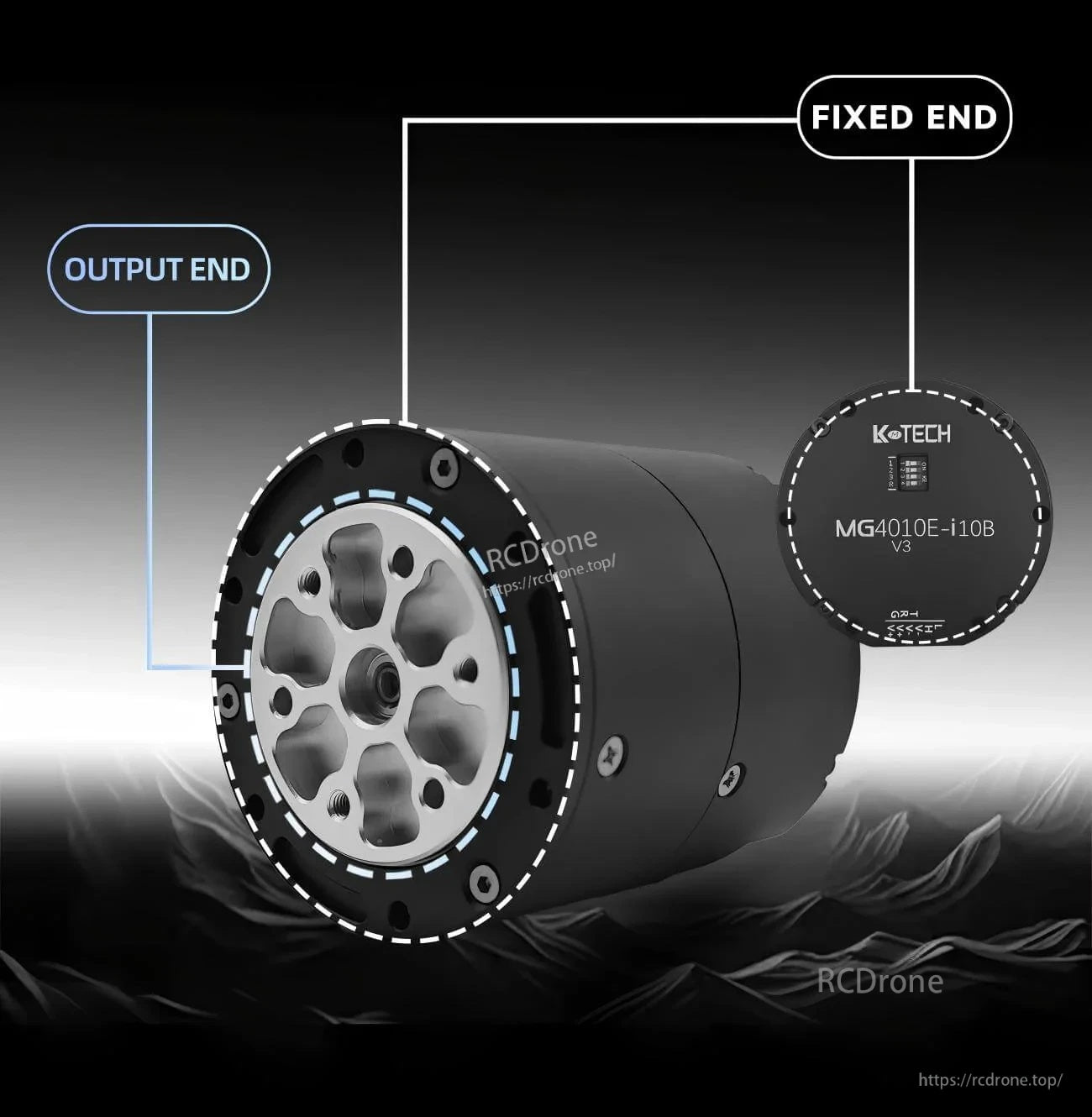
Mwisho wa pato ulio wazi na mwisho ulio thabiti husaidia kurahisisha uunganishaji wa mitambo na usawa katika mkusanyiko.

Maoni ya encoder na mawasiliano ya basi yanasaidia kudhibiti torque, kasi, na nafasi kwa viungo vya roboti kwa uthabiti.
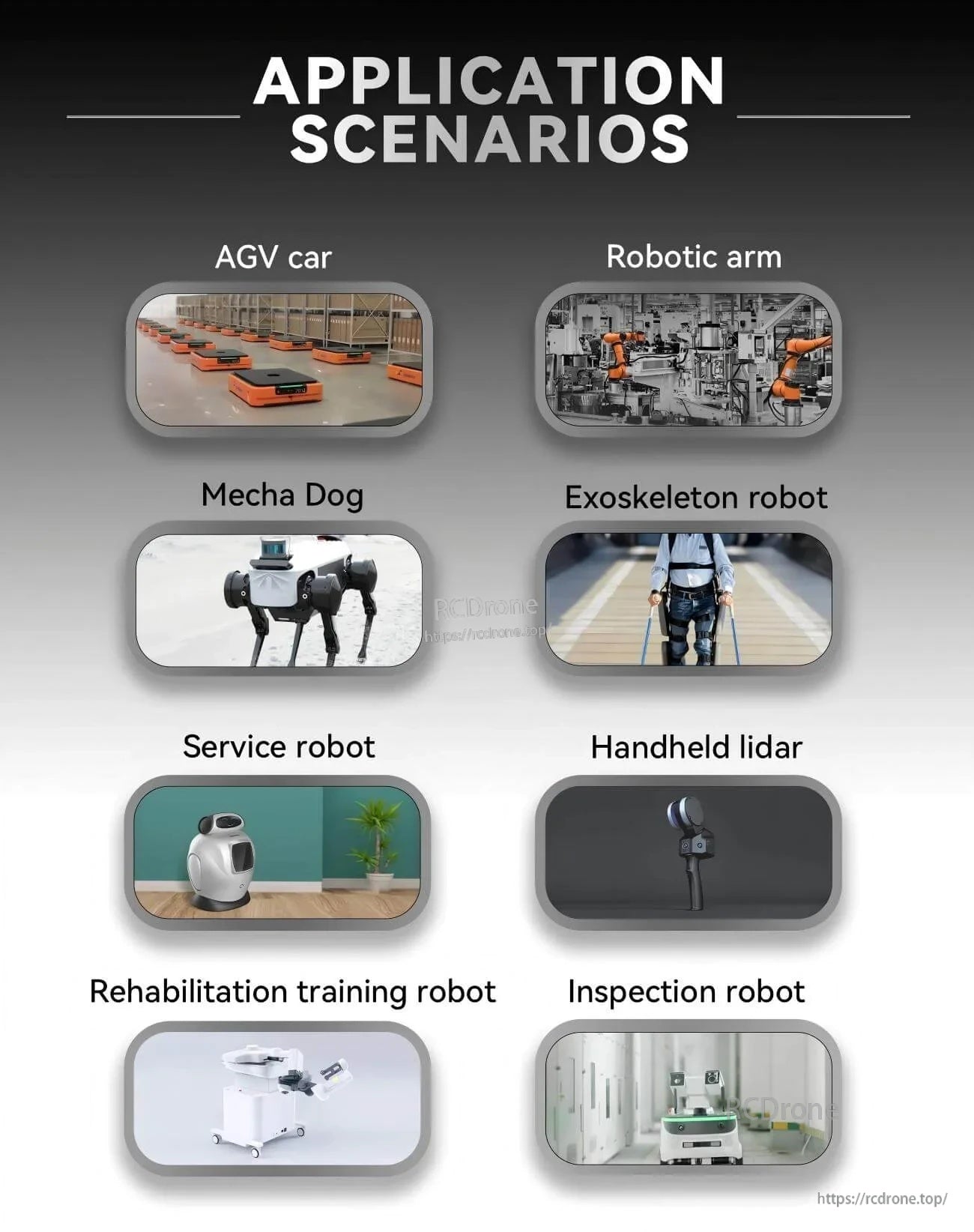
Imepangwa kwa kazi za uendeshaji wa roboti kutoka kwa AGVs na mikono ya roboti hadi roboti zenye miguu na mifumo ya exoskeleton.
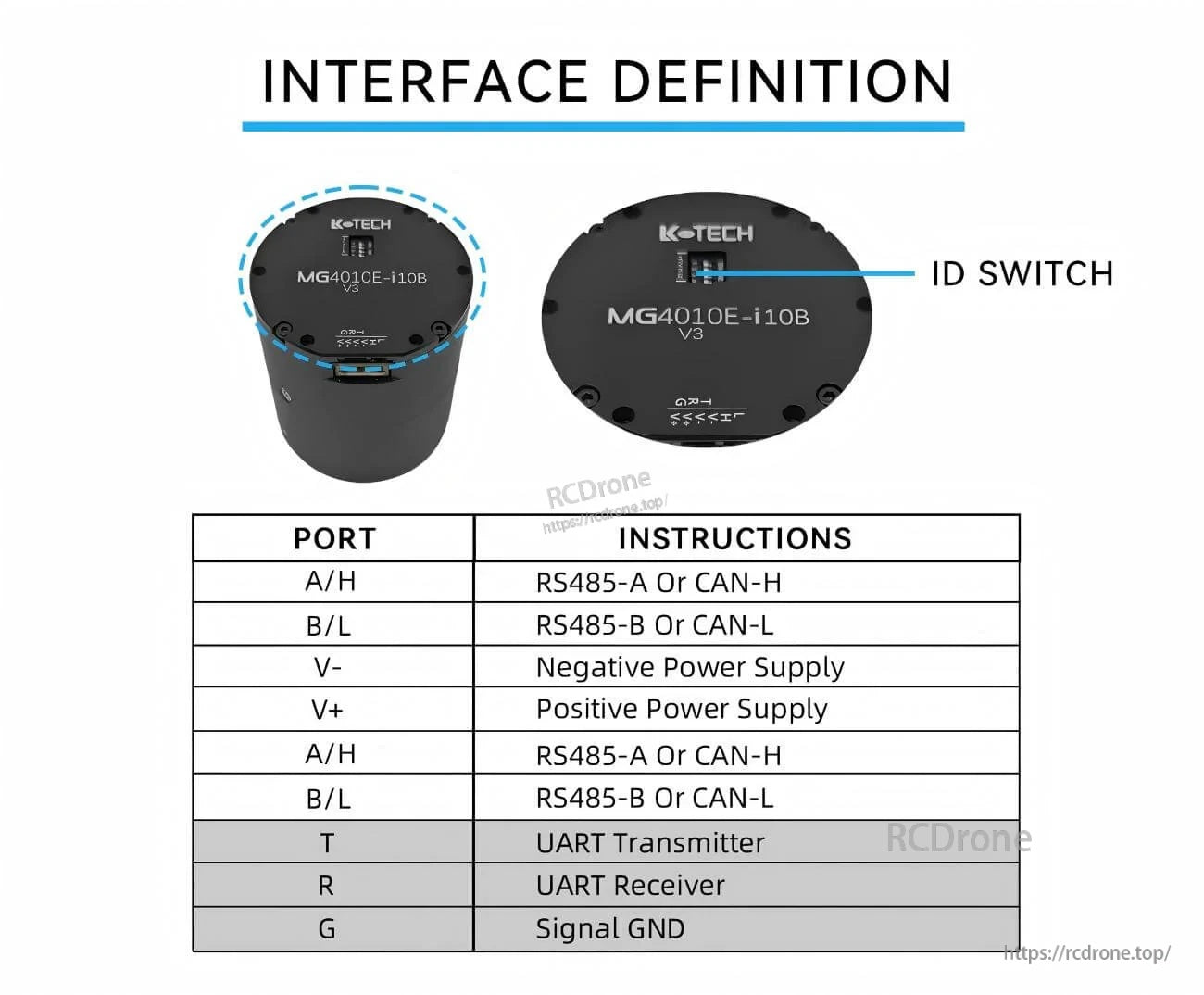
Maelezo ya bandari yanajumuisha nguvu, wiring ya RS485/CAN, na pini za UART, pamoja na swichi ya ID ya ndani kwa ajili ya anwani.

Related Collections




