




LKMTECH MG6012-i36-V3 Motor 24V/48V 25N.m 1:36 Kipunguza Mzunguko wa Sayari, RS485/CAN, Kichunguzi cha 18bit
LKMTECH MG6012-i36-V3 Motor 24V/48V 25N.m 1:36 Kipunguza Mzunguko wa Sayari, RS485/CAN, Kichunguzi cha 18bit
LKMTECH
Couldn't load pickup availability
Muhtasari
LKMTECH MG6012-i36-V3 Motor ni moduli ya motor isiyo na brashi yenye nguvu kubwa yenye mpunguzaji wa sayari na msaada wa mawasiliano ya encoder/kuendesha kwa mifumo ya mwendo wa roboti. Maandishi ya kuweka bidhaa yanajumuisha: “Kiwango cha juu zaidi cha muundo wa bidhaa”, “Nguvu ya Kutoka ya Juu”, “Torque Kubwa ya Kutoka”, na “Usahihi wa Juu”.
Matukio ya Maombi
- Roboti za kibinadamu
- Michemu za roboti
- Exoskeletons
- Roboti za mguu minne
- Magari ya AGV / gari la AGV
- Roboti za ARU
- Mbwa roboti
- Roboti inayovaa
Vipengele Muhimu
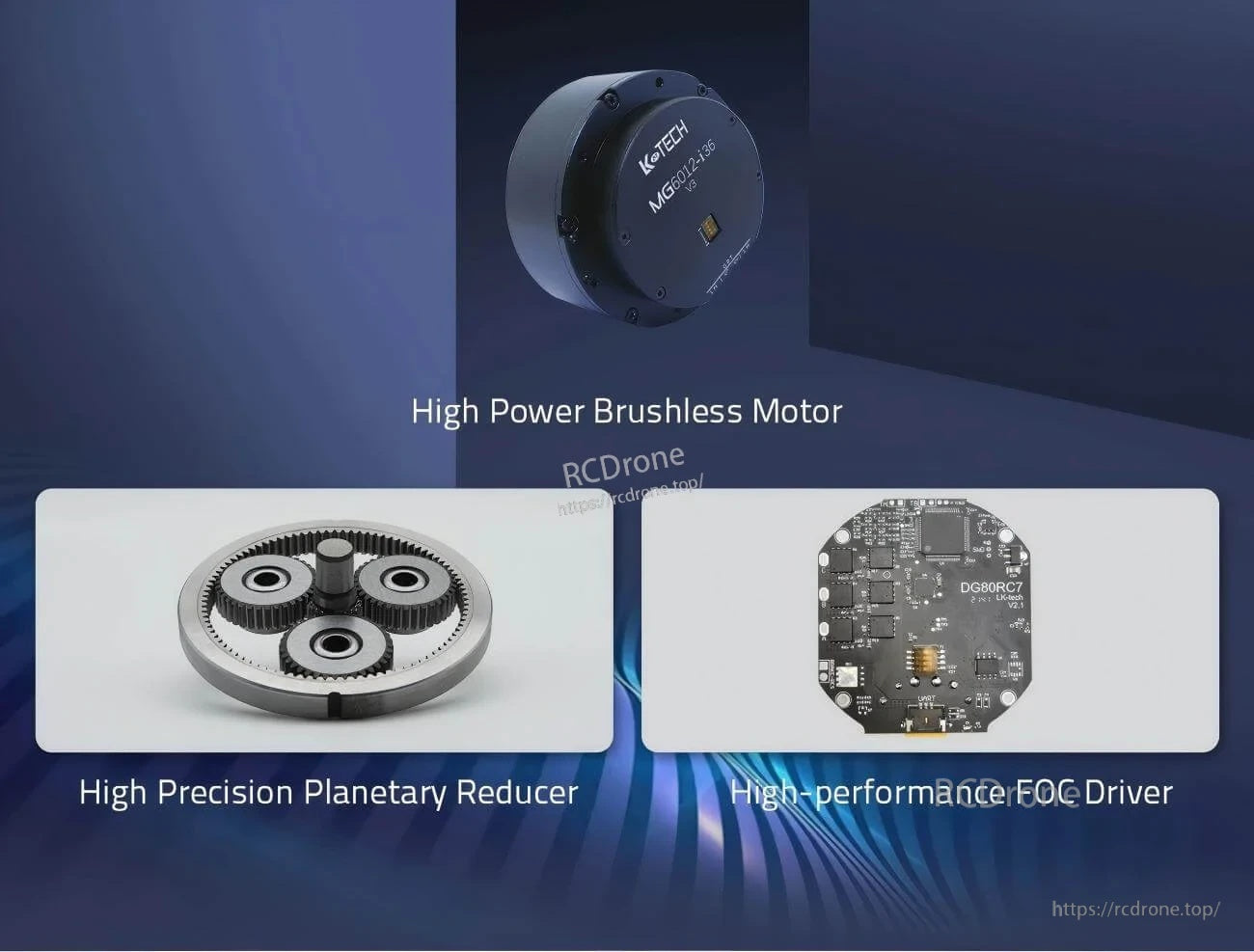
- Motor isiyo na brashi yenye nguvu kubwa
- Reducer ya sayari yenye usahihi wa juu
- Dereva wa FOC wenye utendaji wa juu (marejeleo ya maandiko)
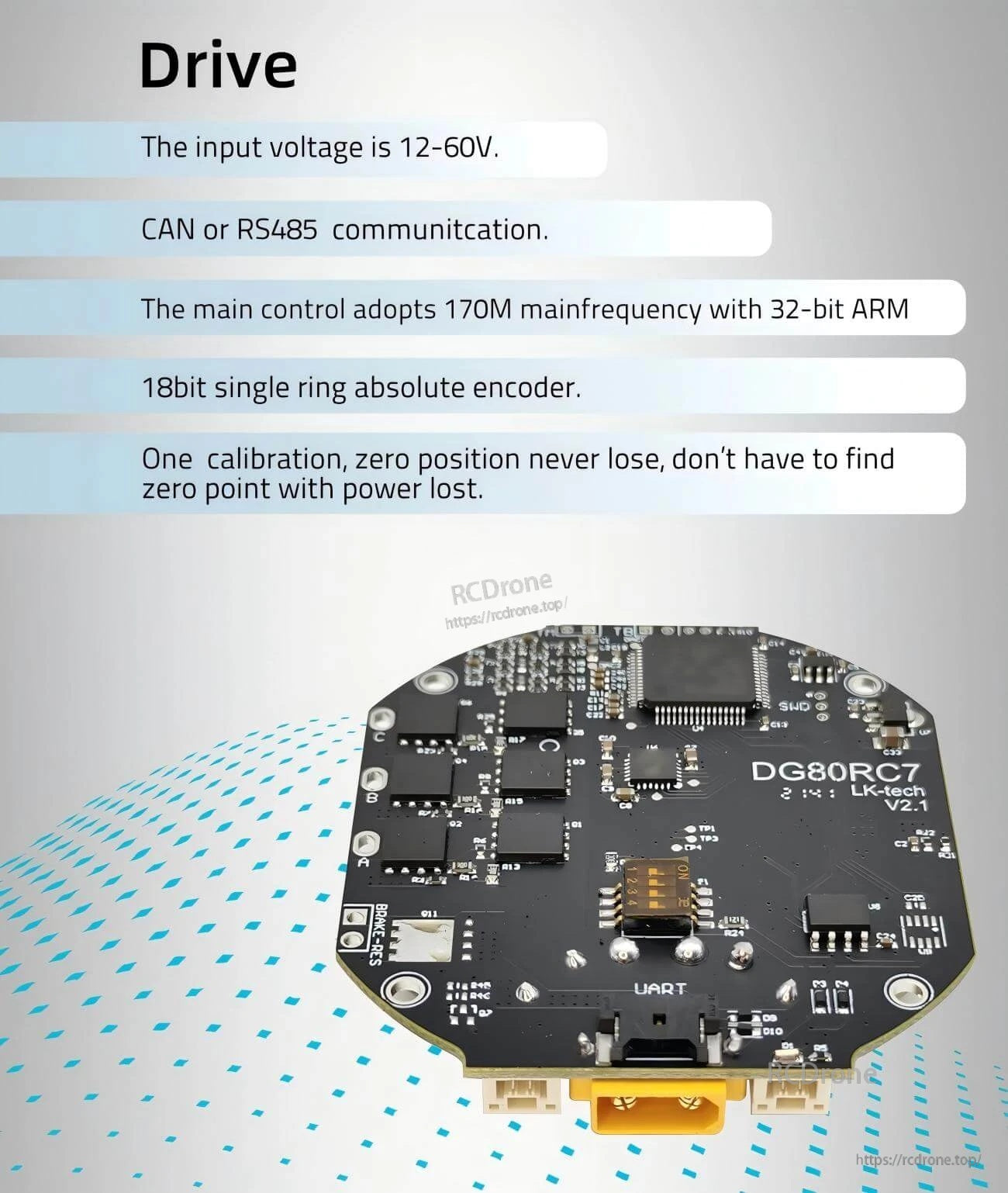
- Voltage ya kuendesha: 12-60V
- Mawasiliano: CAN au RS485
- Udhibiti mkuu: 170M frequency kuu yenye 32-bit ARM (marejeleo ya maandiko)
- Encoder: 18bit single ring absolute encoder / 18bit magnetic encoder (zote zimeelezwa)
- “Kalibrishaji moja, nafasi sifuri haipotei kamwe, huna haja ya kutafuta pointi sifuri wakati nguvu imepotea.” (ilisemwa)
- Kubadilisha ID (ilisemwa)
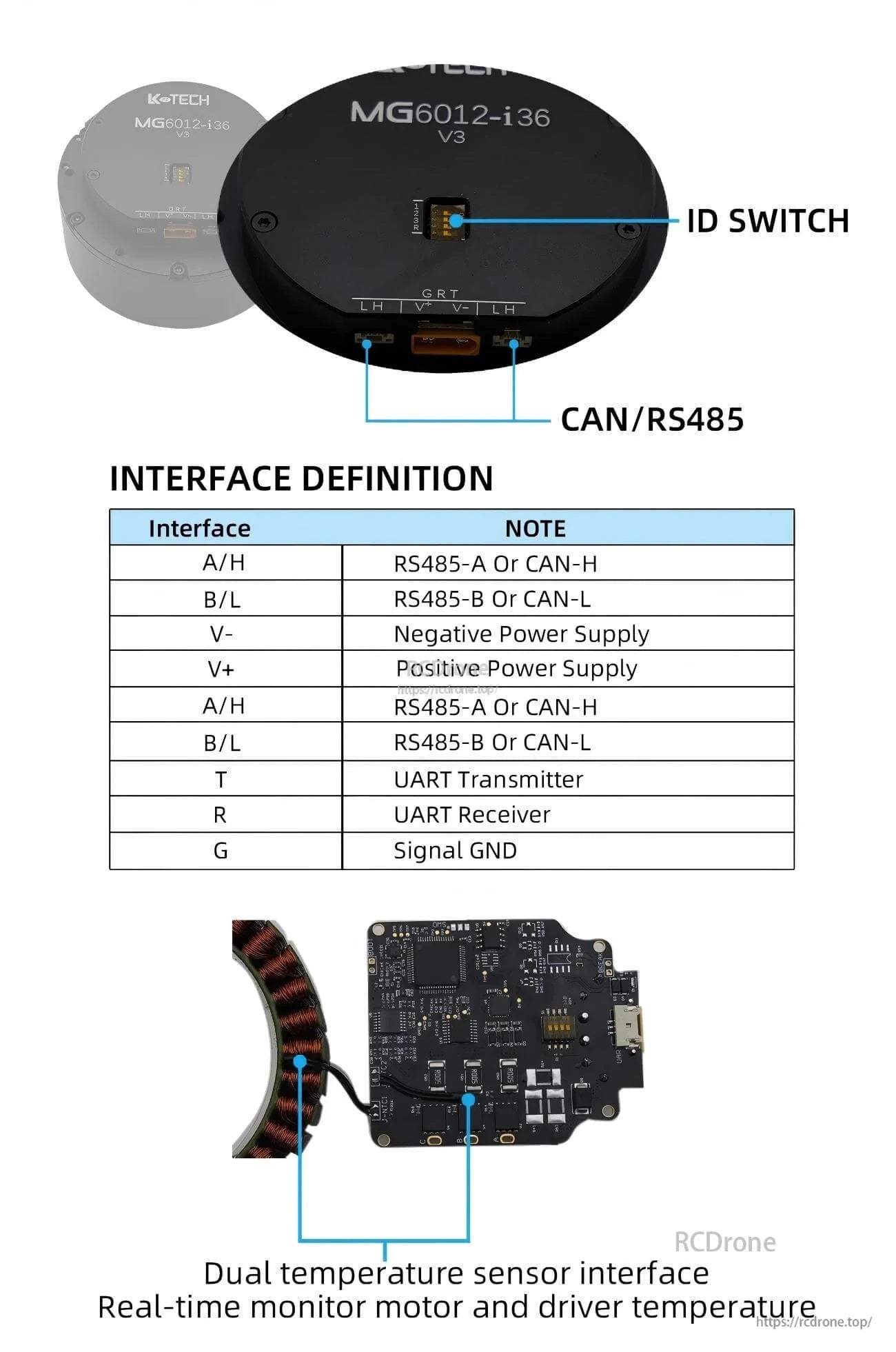
- Kiolesura cha sensor ya joto mbili; kufuatilia joto la motor na dereva kwa wakati halisi (ilisemwa)
Maelezo
| Parameta | Toleo la 24V | Toleo la 48V |
|---|---|---|
| Jina la Kitu | MG6012-i36-V3 | MG6012-i36-V3 |
| Voltage Iliyopangwa | 24V | 48V |
| Speed ya Juu | 45RPM | 88RPM |
| Torque Iliyopangwa | 25N.m | 25N.m |
| Speed Iliyopangwa | 45RPM | 74RPM |
| Current Iliyopangwa | 4A | 4.8A |
| Power ya Juu | 140W | 500W |
| Torque ya Juu | 40N.m | 40N.m |
| Spidi ya kudumu | 67rpm/V | 67rpm/V |
| Torque ya Kudumu | 0.175N.m/A | 0.146N.m/A |
| Zamu | 15 | 15 |
| Aina ya Uwindaji | Y | Y |
| Upinzani wa Awamu | 0.63Ω | 0.63Ω |
| Induktansi ya Awamu | 0.28mH | 0.28mH |
| Nguzo za Motor | 28 | 28 |
| Inertia ya Rotor | 930 | 908 |
| Joto la Motor | NDIYO | NDIYO |
| Aina ya Reducer | PG4136 | PG4136 |
| Ratio ya Kupunguza | 1:36 | 1:36 |
| Backlash | ≤12 arcmin | ≤12 arcmin |
| Mzigo wa Kubeba Ulioidhinishwa | 1770N | 1770N |
| Uzito wa Motor | 503g | 503g |
| Pendekeza Drive | DG60 | DG60 |
| Voltage ya Kuingiza Drive | 12-60V | 12-60V |
| Mawasiliano | RS485 AU CAN | RS485 AU CAN | Mzunguko wa Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder ya Magnetic ya 18bit | Encoder ya Magnetic ya 18bit |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Curve ya Kuongeza | Kuongeza trapezoid | Kuongeza trapezoid |
Maelezo ya Kiunganishi
CAN/RS485 na swichi ya ID inapatikana (imeelezwa). Interface notes:
| Kiolesura | Kumbukumbu |
|---|---|
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| V- | Chanzo cha nguvu hasi |
| V+ | Chanzo cha nguvu chanya |
| T | Transmitter wa UART |
| R | Receiver wa UART |
| G | Signal GND |
Maelekezo / Hati
Kuhusu maswali ya uunganisho (mipangilio ya CAN/RS485, uchaguzi wa baud rate, au kuunganishwa kwa kidhibiti), wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo

MG6012-i36-V3 inajumuisha motor, reducer ya sayari isiyo na brashi, na mawasiliano ya encoder kwa viungo vya roboti.
Mfumo wa kuendesha wa kompakt umejengwa kuzunguka msingi wa motor yenye nguvu kubwa, kupunguza sayari kwa usahihi, na dereva wa FOC.
Elektroniki za kidhibiti zinasaidia ingizo la 12–60V pamoja na mawasiliano ya CAN au RS485 na chaguo la encoder ya 18-bit absolute.
Maelezo wazi ya pini na swichi ya ID iliyopo kwenye bodi husaidia kurahisisha wiring na mipangilio ya CAN/RS485 ya nodi nyingi.

Reducer ya sayari ya 1:36 imeundwa kwa ajili ya backlash ya chini na pato la torque kubwa katika mkusanyiko wa mwendo wa usahihi.
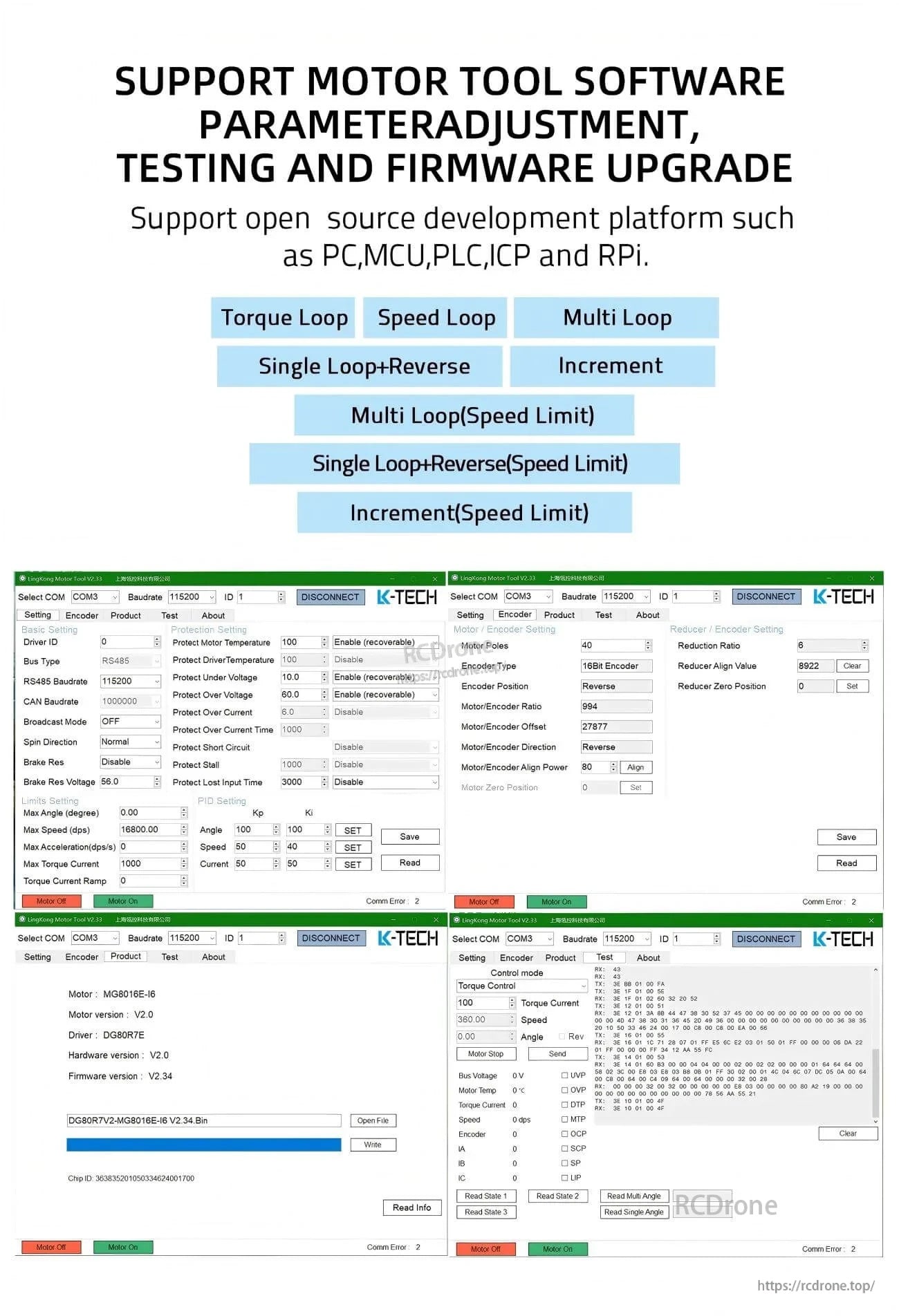
Programu ya usanidi inasaidia tuning ya vigezo, majaribio ya hali ya mzunguko, na masasisho ya firmware kwenye majukwaa ya kawaida ya maendeleo.
Inafaa kwa matumizi ya roboti kama AGVs, mikono ya roboti, wanyama wanne, na mitambo ya kuvaa/exoskeleton.
Related Collections




