




LKMTECH MG6012E-i8-V2 Motor 48V 6N.m Iliyokadiriwa 16N.m Max, 1:8 Kipunguza Mzunguko, RS485/CAN Encoder
LKMTECH MG6012E-i8-V2 Motor 48V 6N.m Iliyokadiriwa 16N.m Max, 1:8 Kipunguza Mzunguko, RS485/CAN Encoder
LKMTECH
Regular price
$411.00 USD
Regular price
Sale price
$411.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
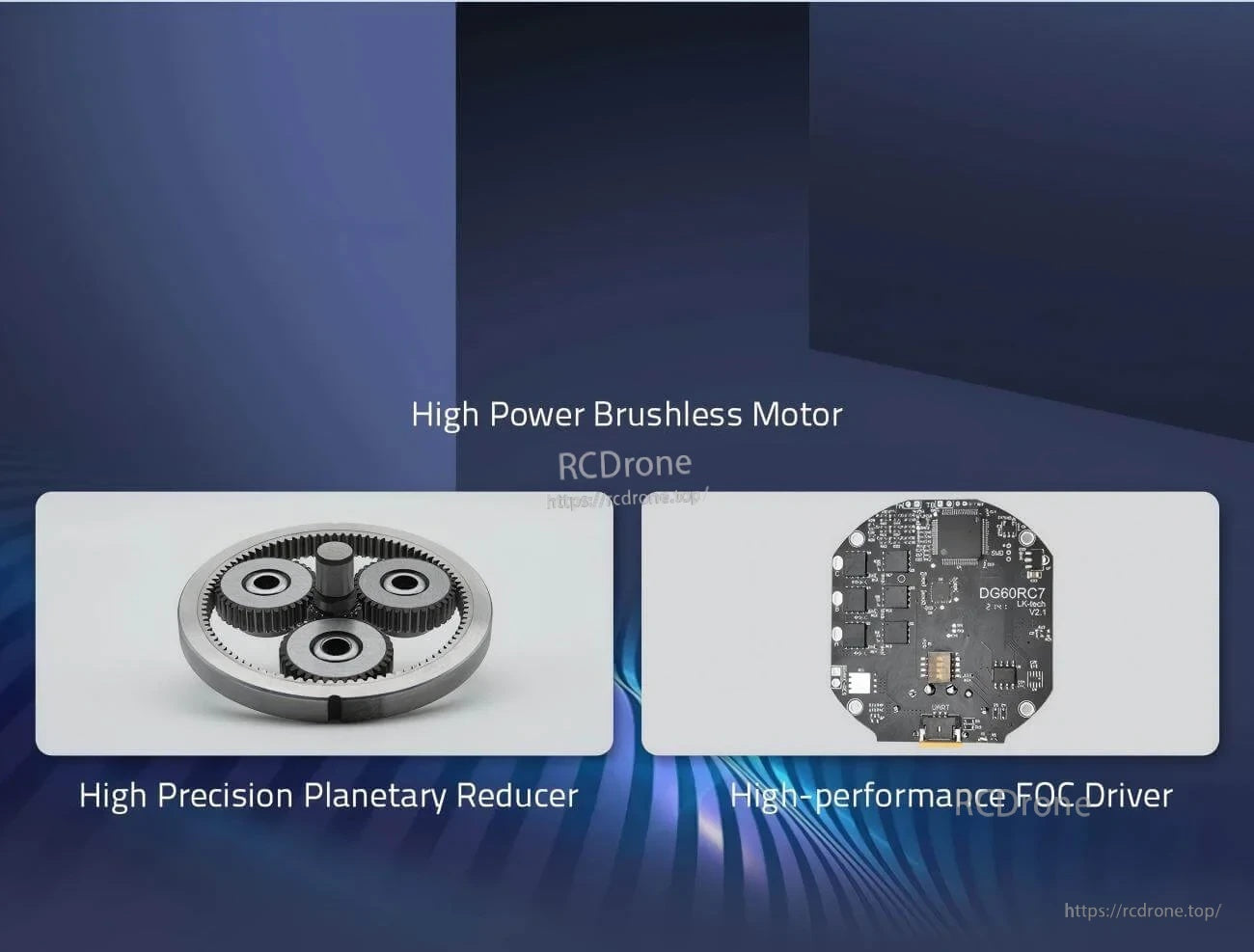
LKMTECH MG6012E-i8-V2 Motor ni motor isiyo na brashi yenye nguvu kubwa yenye mpunguzaji wa sayari wa usahihi wa juu (sawa 1:8) na vichanganuzi vya sumaku vilivyojumuishwa kwa matumizi ya kudhibiti mwendo. Imeundwa kwa ajili ya nguvu kubwa ya pato, torque kubwa ya pato, na usahihi wa juu.
Vipengele Vikuu
- Nguvu ya pato ya juu / torque kubwa ya pato / usahihi wa juu
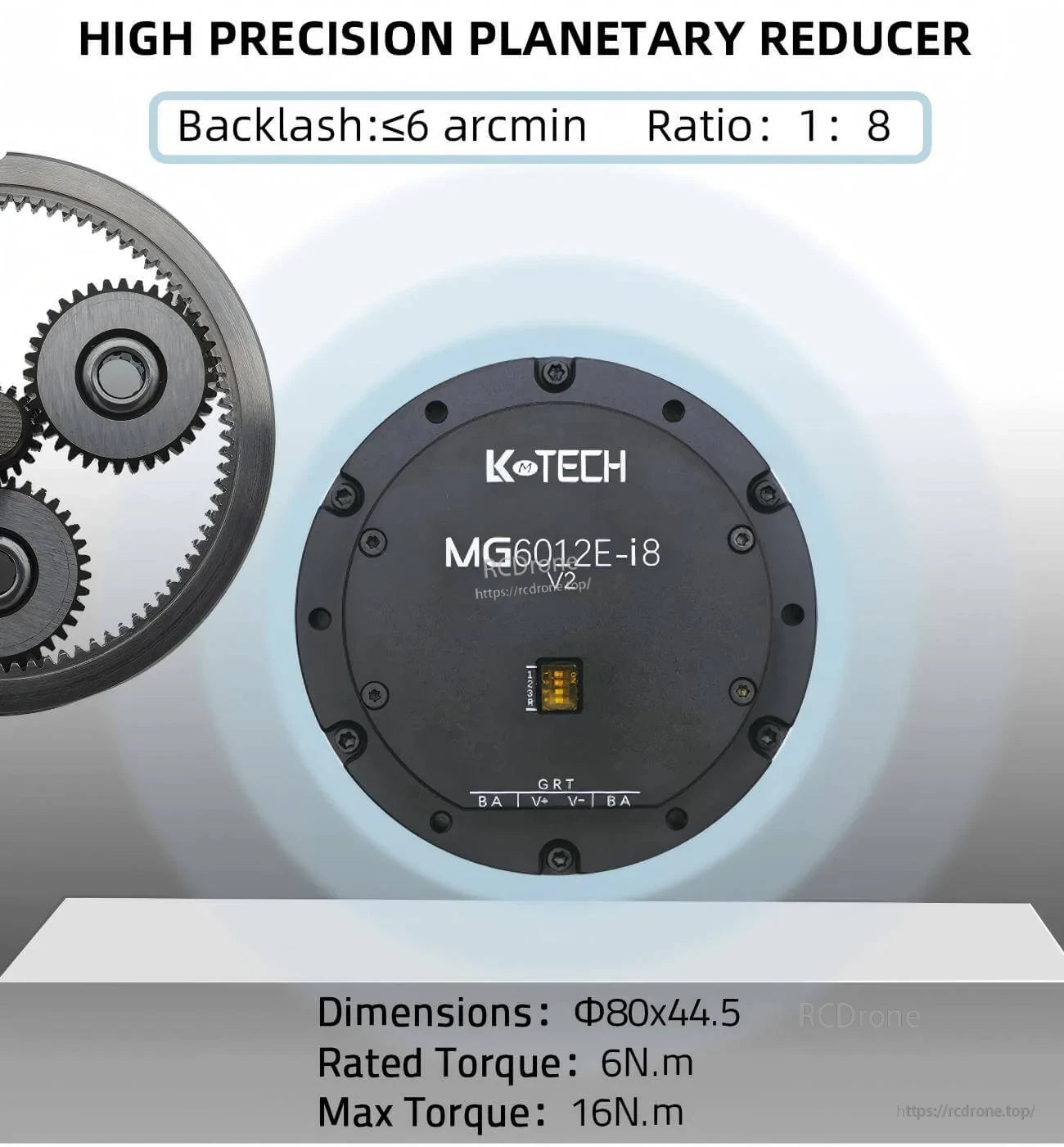
- Reducer ya sayari yenye usahihi wa juu: backlash ≤6 arcmin, uwiano 1:8
- Encoder: 18-bit (motor) + 14-bit (reducer) encoder wa magnetic
- Chaguzi za mawasiliano: RS485 au CAN
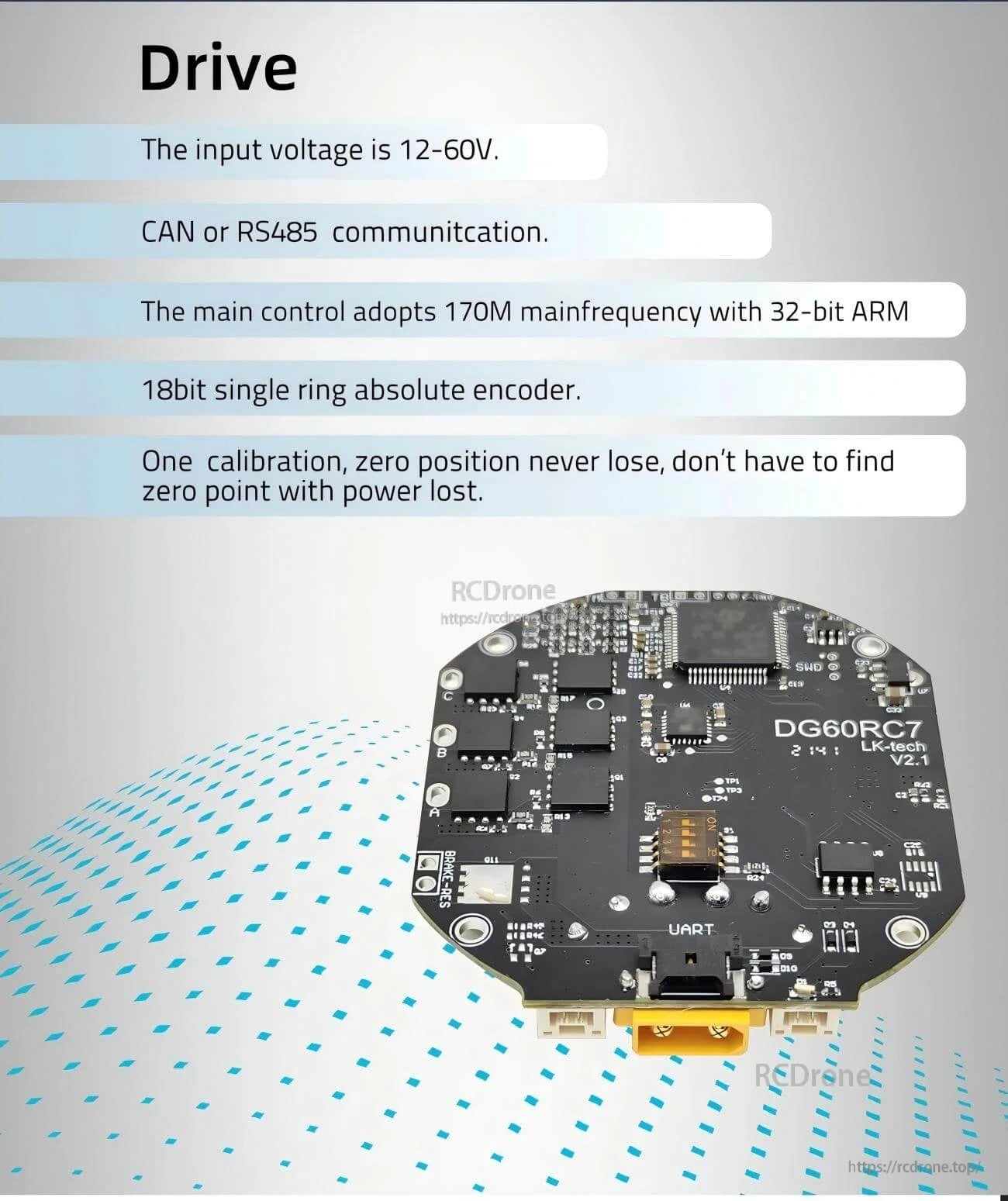
- Voltage ya kuingiza dereva: 12-60V (dereva inashauriwa: DG60Ev2)
- Encoder ya absolute ya pete moja ya 18-bit; kalibrishaji moja, nafasi ya sifuri haitapotea kamwe; hakuna haja ya kutafuta sifuri baada ya kupoteza nguvu
- Udhibiti mkuu unatumia 170M frequency kuu na 32-bit ARM (maelezo ya kipengele cha dereva)
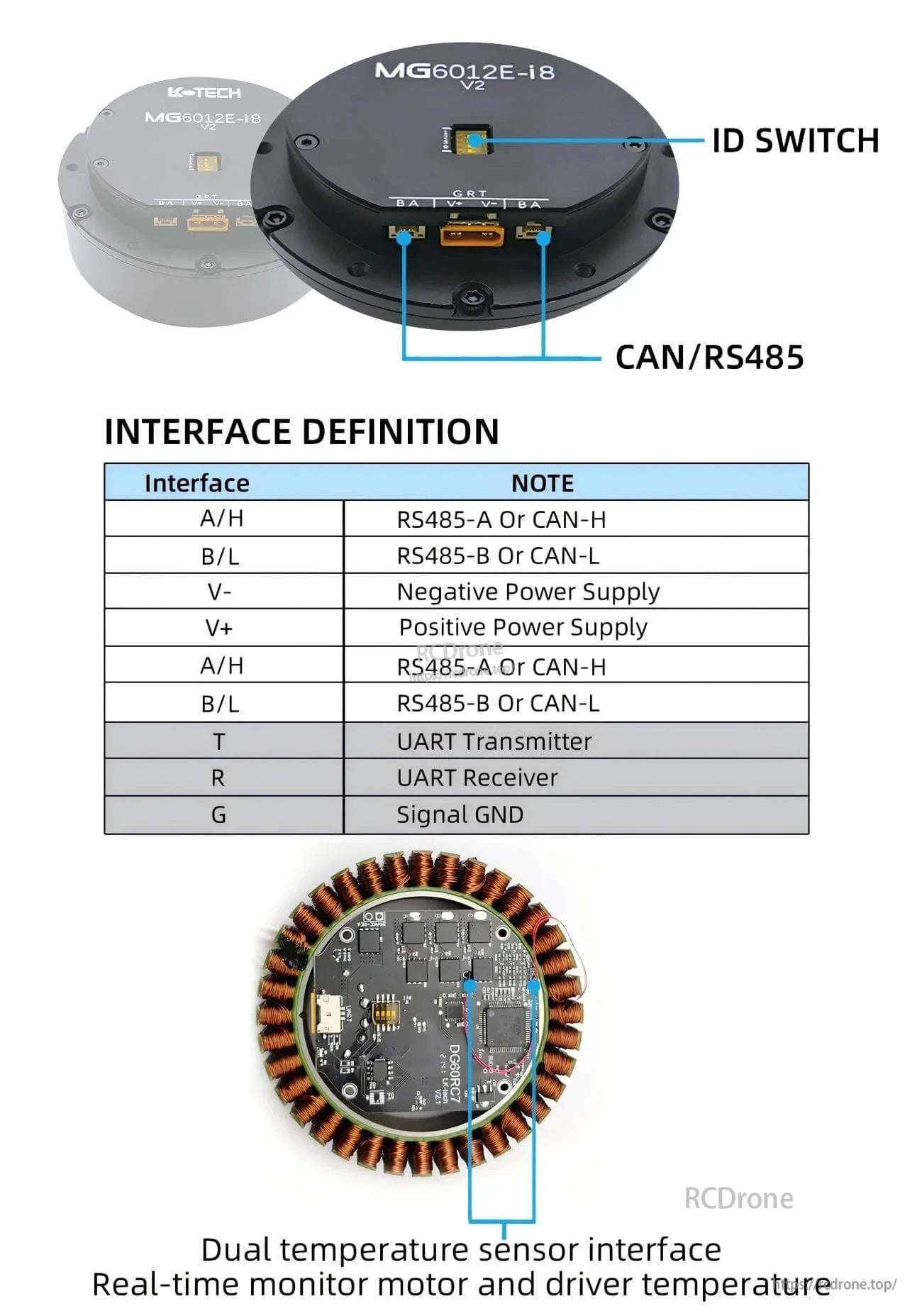
- Swichi ya ID; CAN/RS485 interface; UART interface (T/R/G) inapatikana kwa kila ufafanuzi wa interface
- Interface ya sensor ya joto mbili; kufuatilia kwa wakati halisi joto la motor na dereva
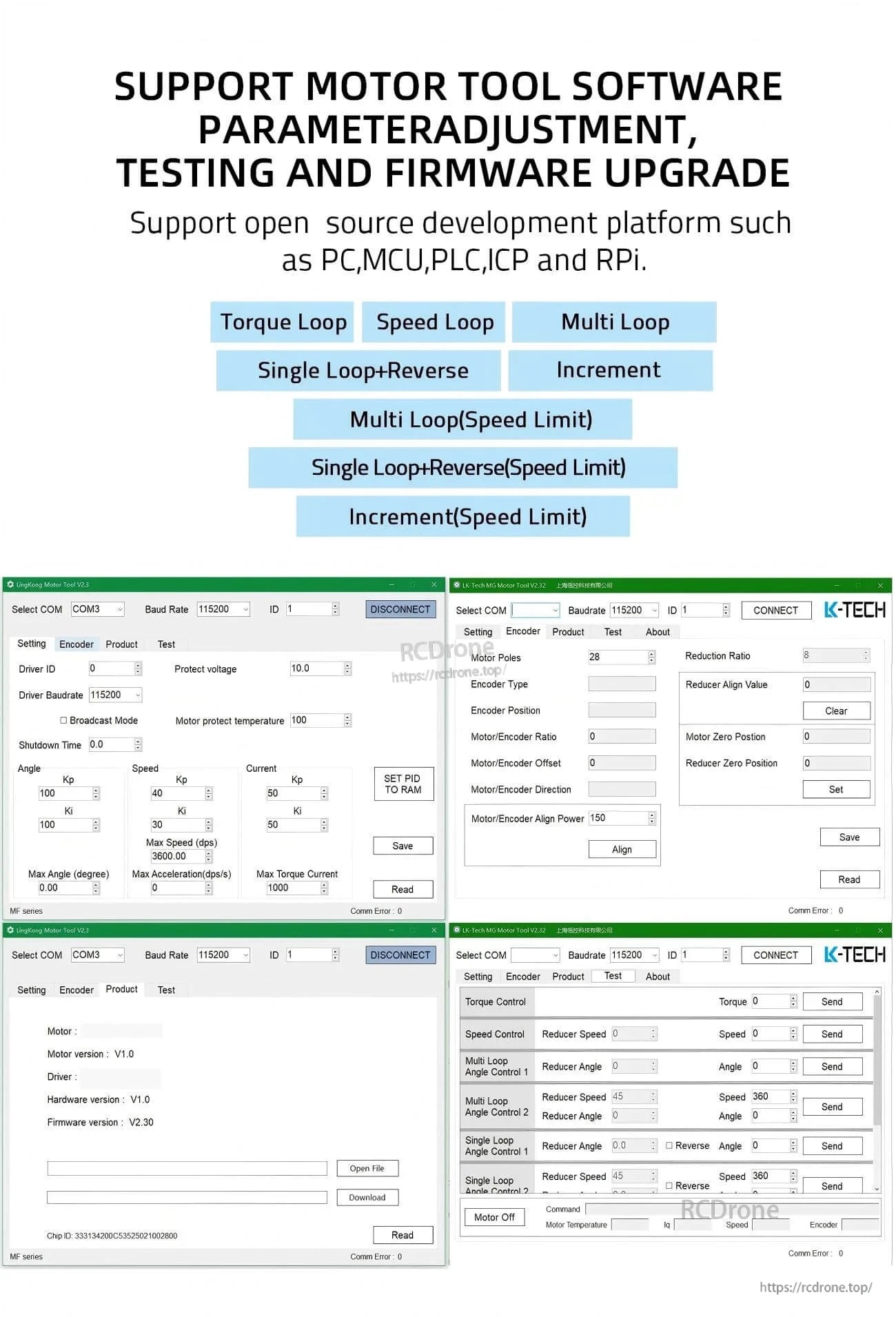
- Inasaidia programu za zana za motor: marekebisho ya parameta, majaribio, na sasisho la firmware
- Inasaidia majukwaa ya maendeleo ya chanzo wazi kama vile PC, MCU, PLC, ICP na RPi
Maelezo
| Jina la Kitu | MG6012E-i8-V2 |
| Voltage Iliyoainishwa | 48V |
| Speed ya Juu | 310RPM |
| Torque Iliyoainishwa | 6N.m |
| Max Torque | 16N.m |
| Rated Speed | 256RPM |
| Rated Current | 3.5A |
| Max Power | 294W |
| Speed constant | 42.7rpm/V |
| Torque Constant | 1.09N.m/A |
| Turns | 20 |
| Winding Type | Y |
| Phase Resistance | 1.3Ω |
| Phase Inductance | 0.55mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 930gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG4108 |
| Uwiano wa Kupunguza | 1:8 |
| Backlash | ≤6 arcmin |
| Mzigo wa Kuboreshwa wa Bearing | 906N |
| Uzito wa Motor | 430g |
| Vipimo | Φ80x44.5 |
| Pendekeza Drive | DG60Ev2 |
| Voltage ya kuingiza Drive | 12-60V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Magnetic Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 1M |
| Njia ya Kudhibiti | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Curve ya Kuongeza | Kuongeza trapezoid |
Ufafanuzi wa Kiunganishi
| Kiunganishi | Kumbuka |
|---|---|
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| V- | Nguvu hasi ya usambazaji |
| V+ | Nguvu chanya ya usambazaji |
| T | Transmitter wa UART |
| R | Receiver wa UART |
| G | Signal GND |
Maombi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons / roboti zinazovaa
- Roboti za mguu nne / mbwa roboti
- Magari ya AGV / gari la AGV
- Roboti za ARU
Kwa msaada wa uunganisho na usaidizi wa uchaguzi wa bidhaa, wasiliana na [email protected] or tembelea https://rcdrone.top/ .
Maelekezo / Upakuaji
Maelezo



Related Collections




