




LKMTECH MG6012E-i8B-V3 Motor 48V Gia ya Sayari 1:8 Breki RS485/CAN Kichunguzi cha Sumaku
LKMTECH MG6012E-i8B-V3 Motor 48V Gia ya Sayari 1:8 Breki RS485/CAN Kichunguzi cha Sumaku
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG6012E-i8B-V3 ni motor ya geari ya sayari ya hatua mbili yenye breki, iliyoundwa kwa ajili ya roboti na actuators za automatisering zinazohitaji ukubwa mdogo, pato kubwa la torque, na mawasiliano ya dijitali.
Vipengele Vikuu
- Motor ya gia ya sayari ya hatua mbili yenye breki
- Uwiano wa gia: 1:8
- Kurudi nyuma kwa gia: arcmin (maandishi ya picha); 6 arcmin (specification)
- Ukubwa wa motor: 80*60
- 18-bit single-turn absolute magnetic encoder (maandishi ya picha)
- Usanidi wa encoder: 18bit (motor) + 14bit (reducer) magnetic encoder
- Mawasiliano: RS485 au CAN
- Dereva inayopendekezwa: DG60Ev2; voltage ya kuingiza dereva: 12-60V
- Encoders mbili, kumbuka pointi sifuri baada ya kuzima (maandishi ya picha)
- Support open source development platforms such as PC, MCU, PLC, ICP and RPi (maandishi ya picha)
- Njia ya kudhibiti (specification): Torque Loop (32KHz) / Speed Loop (8KHz) / Position Loop (4KHz)
- Curve ya kasi: Kasi ya Trapeziod
Kwa mwongozo wa uchaguzi au msaada wa uunganisho, wasiliana na [email protected] or tembelea https://rcdrone.top/.
Maelezo
| Jina la Kitu | MG6012E-i8B-V3 |
| Voltage Iliyoainishwa | 48V |
| Speed ya Juu | 310RPM |
| Speed Iliyoainishwa | 256RPM |
| Torque Iliyoainishwa | 6N.m |
| Torque ya Juu | 16N.m |
| Current Iliyoainishwa | 3.5A |
| Power ya Juu | 294W |
| Speed ya Kudumu | 42.7rpm/V |
| Torque ya Kudumu | 1.09N.m/A |
| Zamu | 20 |
| Aina ya Winding | Y |
| Upinzani wa Awamu | 1.3 |
| Inductance ya Awamu | 0.55mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 930gcm2 |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG4108 |
| Uwiano wa Kupunguza | 1:8 |
| Backlash | 6 arcmin |
| Mzigo wa Kubeba Ulioidhinishwa | 1800N |
| Uzito wa Motor | 718g |
| Aina ya Breki | MT15 |
| Torque ya Breki | 1.5N.m |
| Voltage ya Kuanzisha | 24V |
| Nguvu ya Kuanzisha | 17.5W |
| Voltage ya Kudumisha | 7V |
| Nguvu ya Kudumisha | 1.5W |
| Pendekeza Drive | DG60Ev2 |
| Voltage ya kuingiza Drive | 12-60V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Magnetic Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Curve ya Kuongeza kasi | Kuongeza kasi ya Trapeziod |
Maelezo ya Kiunganishi (Picha ya Maandishi)
- ID switch
- Ugavi wa Nguvu Mbaya
- Positive Power supply
- CAN / RS485 (LH) (AB)
| Port | Maelekezo |
|---|---|
| A/H | RS485-A Au CAN-H |
| B/L | RS485-B Au CAN-L |
| V- | Negative Power Supply |
| V+ | Positive Power Supply |
| A/H | RS485-A Au CAN-H |
| B/L | RS485-B Au CAN-L |
| T | UART Transmitter |
| R | UART Receiver |
| G | Signal GND |
Maombi
- Roboti wa kibinadamu
- Vikono vya roboti
- Exoskeletons
- Roboti wa mguu nne
- Magari ya AGV / gari la AGV
- Roboti za ARU
- Mecha Dog
- Roboti ya huduma
- Lidar ya mkono
- Roboti ya mafunzo ya urejeleaji
- Roboti ya ukaguzi
Maelekezo
Maelezo

Motor ya gia ya sayari ya hatua mbili yenye breki kwa ajili ya actuators za roboti ambapo torque kubwa na ukubwa mdogo ni muhimu.
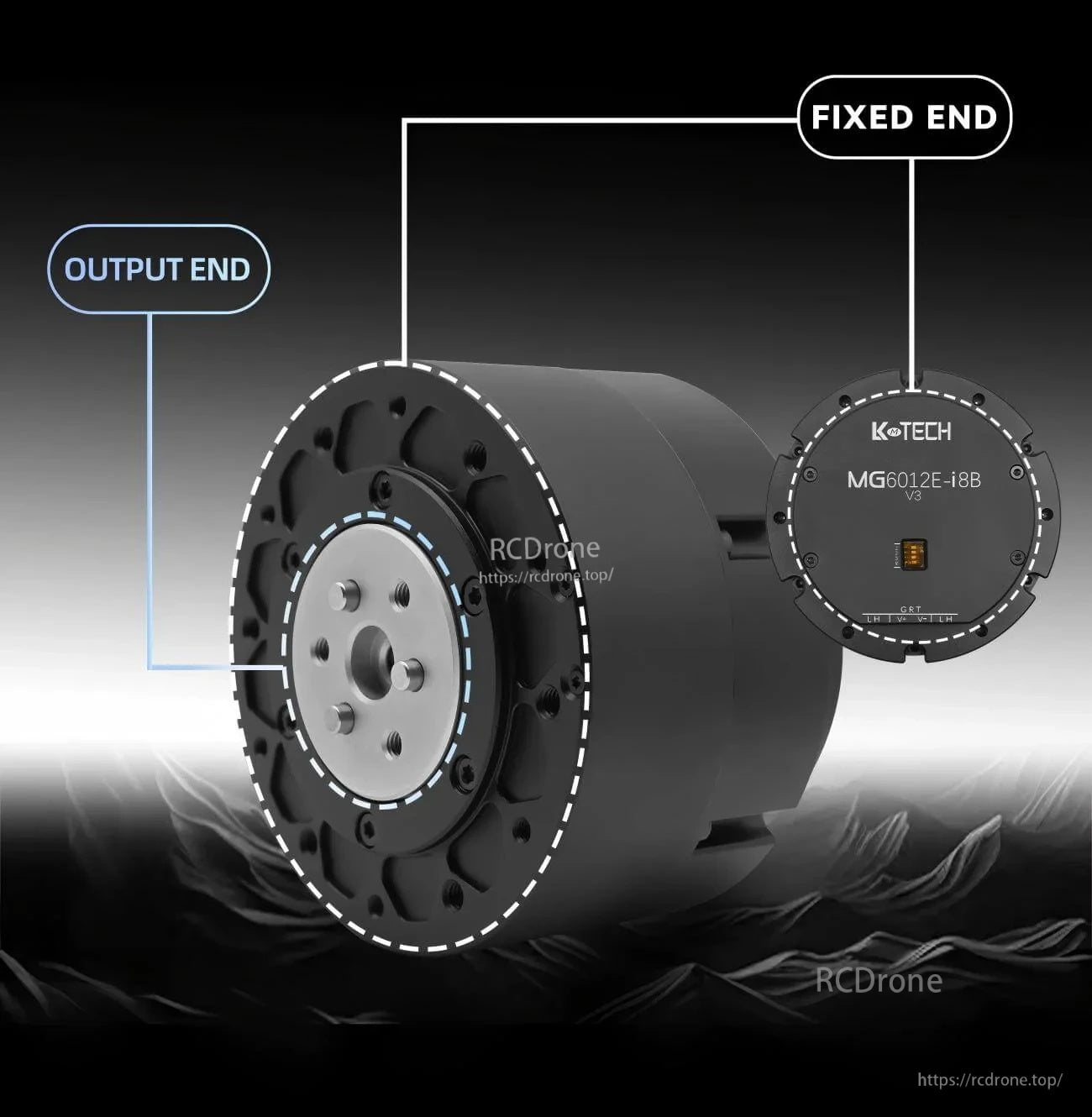
Mbili mwisho wa pato na mwisho ulioimarishwa zimeundwa kwa ajili ya usakinishaji rahisi katika viunganishi, mikono, na makusanyiko mengine ya actuators.

Encoder ya magnetic ya absolute ya mzunguko mmoja ya bit 18 na msaada wa breki iliyounganishwa inasaidia udhibiti sahihi na kushikilia thabiti chini ya mzigo.
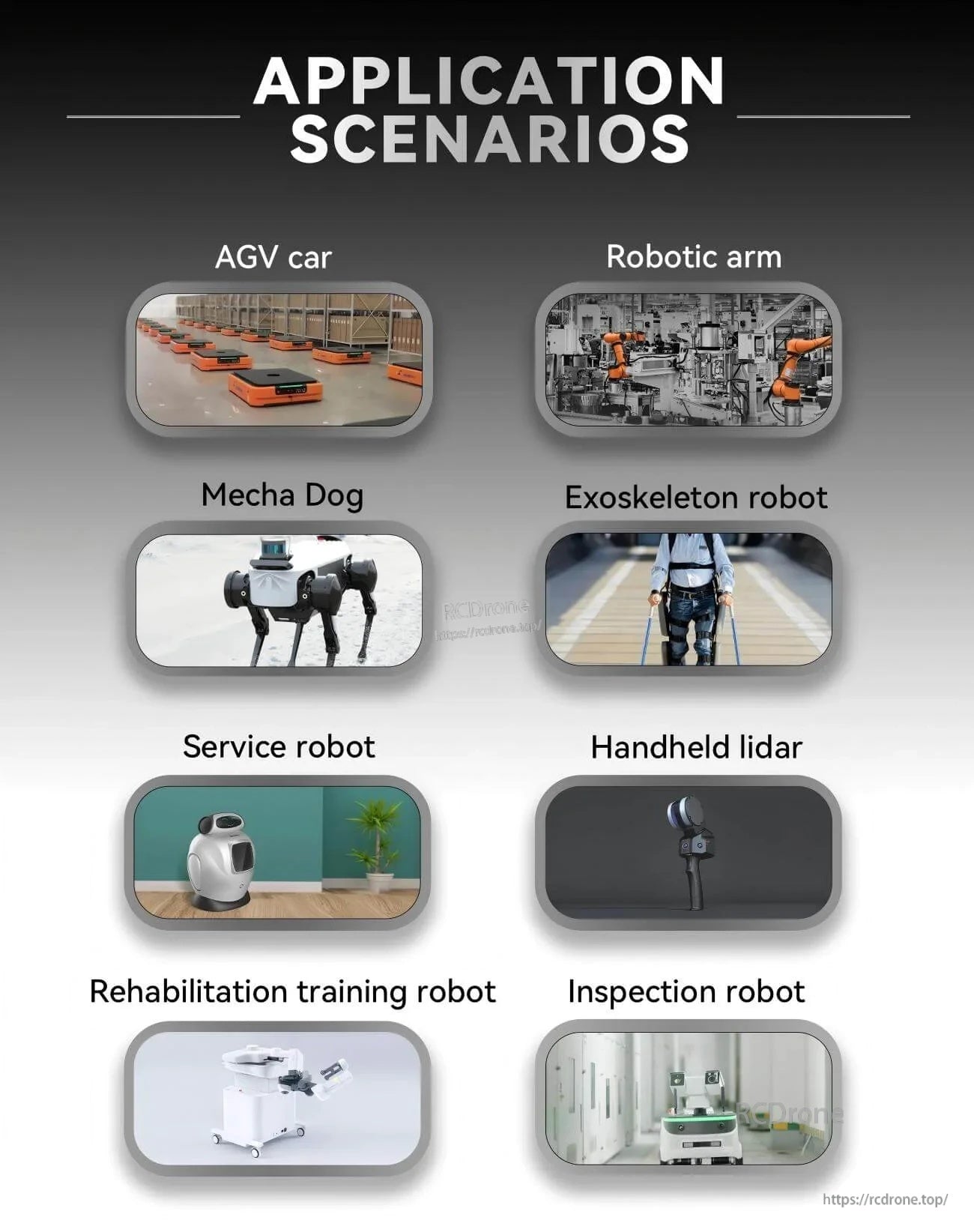
Inafaa kwa miradi ya automatisering kama vile moduli za kuendesha AGV, mikono ya roboti, wanyama wanne, mifupa ya nje, na roboti za ukaguzi.
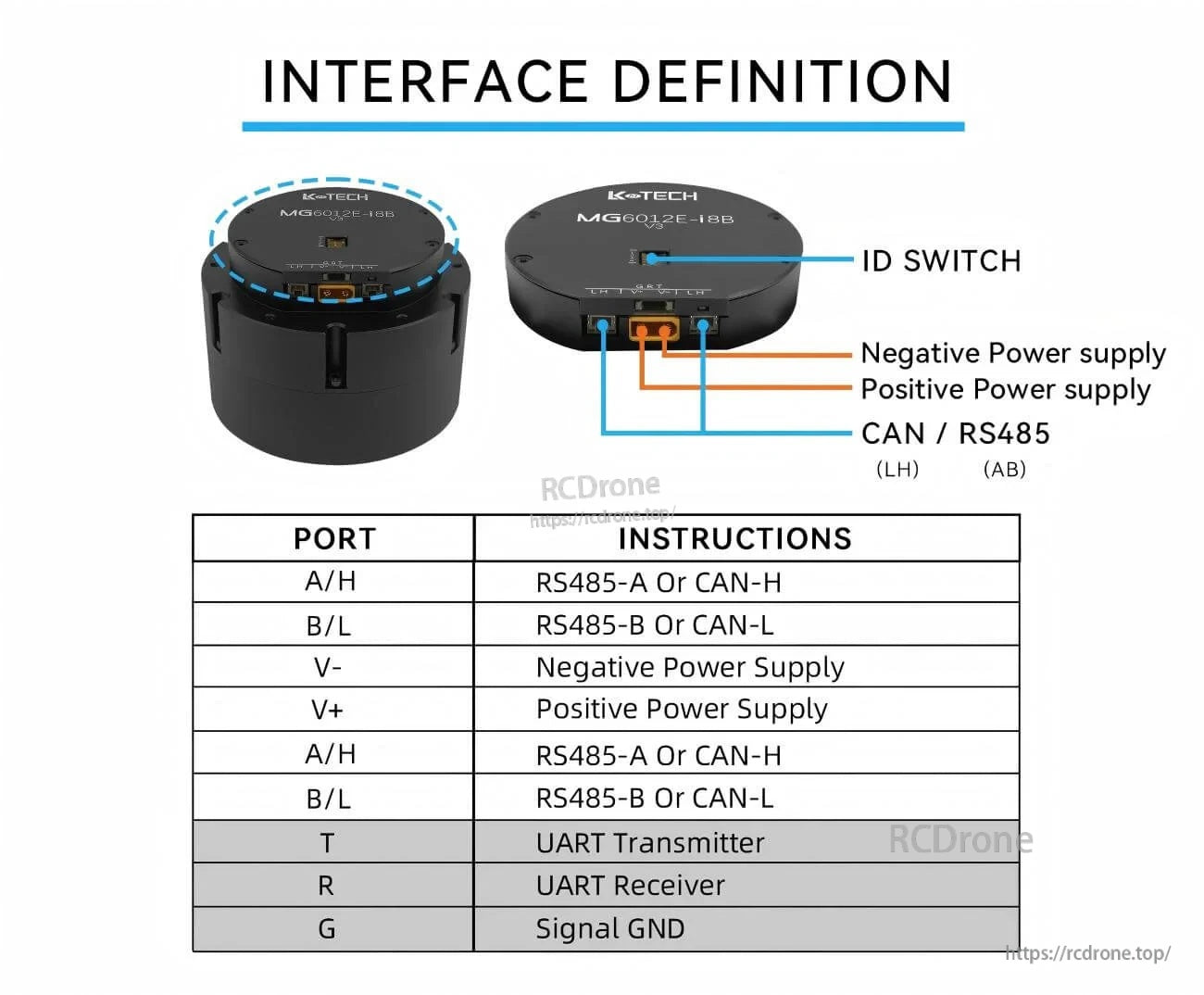
Uwekaji wazi wa bandari husaidia kuongeza kasi ya wiring kwa nguvu, usanidi wa kitambulisho, na mawasiliano ya RS485/CAN.
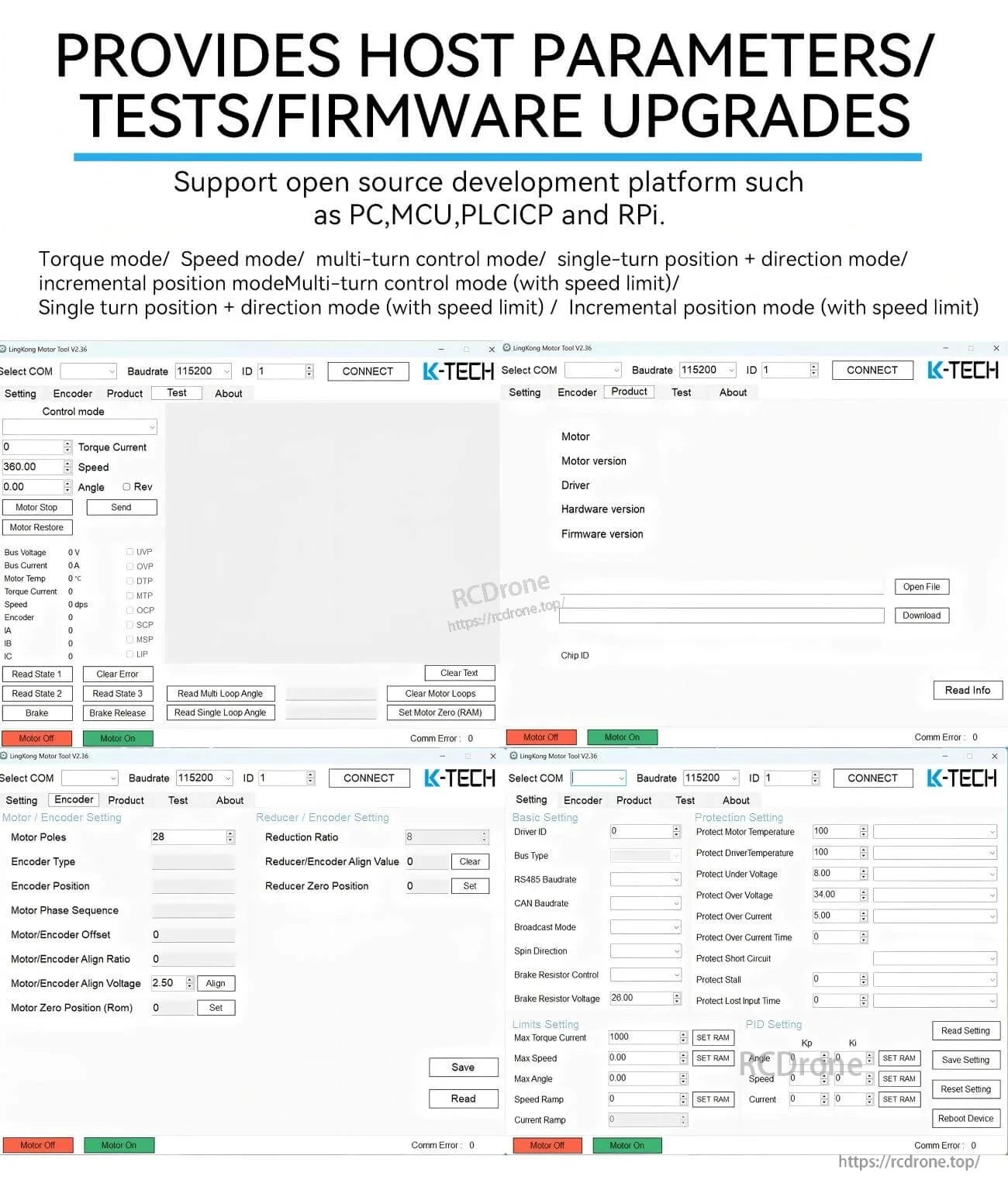
Vifaa vya mwenyeji vinatoa usanidi wa vigezo, upimaji, na masasisho ya firmware katika majukwaa ya kawaida ya maendeleo.
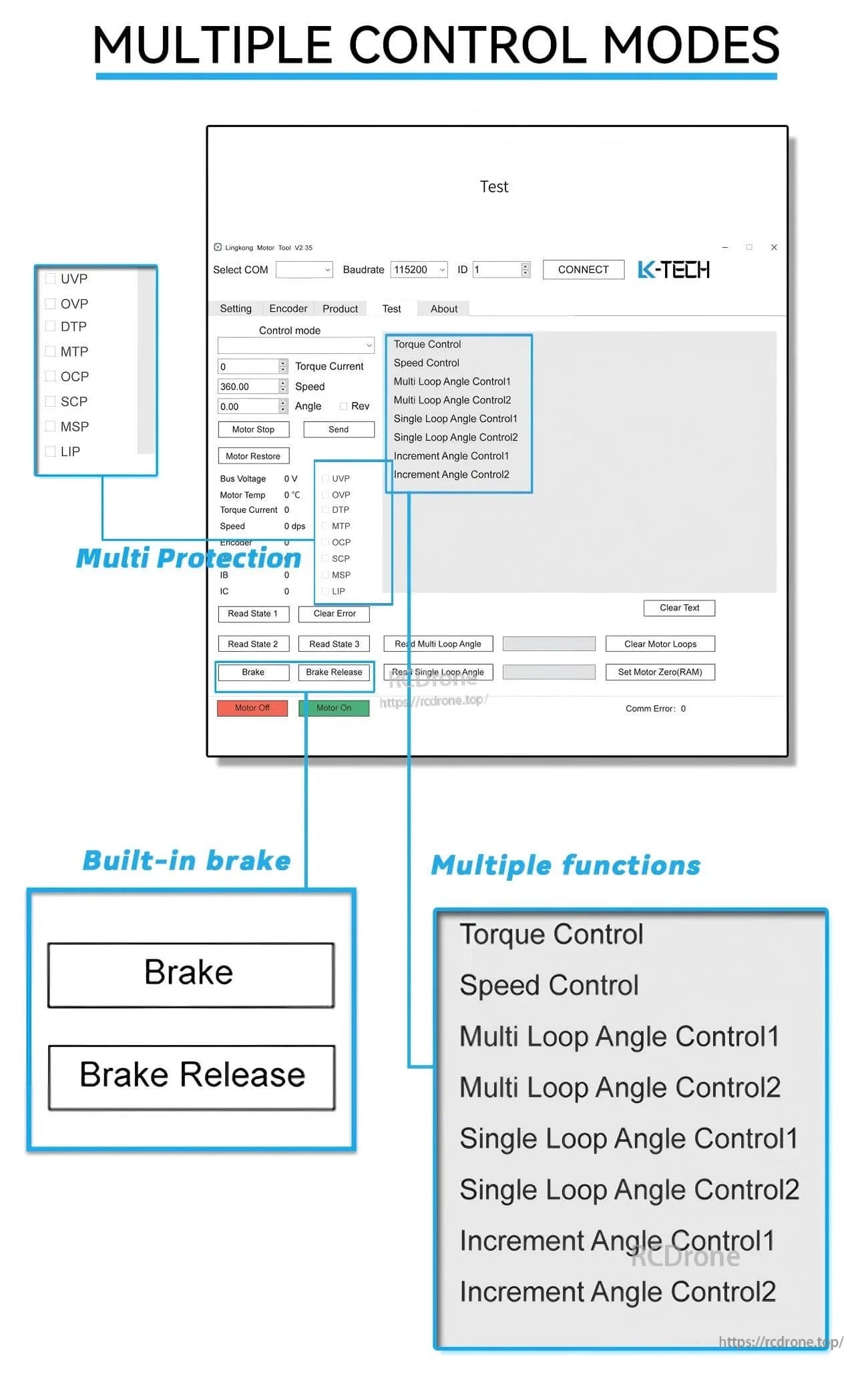
Njia za udhibiti wa torque, kasi, na nafasi zinaweza kuchaguliwa ili kufanana na mahitaji tofauti ya actuator na udhibiti wa mwendo.

Related Collections




