




LKMTECH MG8016E-i6-V2 Motor 48V 670W 12N.m Mzunguko wa Nguvu Planetary Reducer 1:6 RS485/CAN
LKMTECH MG8016E-i6-V2 Motor 48V 670W 12N.m Mzunguko wa Nguvu Planetary Reducer 1:6 RS485/CAN
LKMTECH
Regular price
$495.00 USD
Regular price
Sale price
$495.00 USD
Unit price
kwa
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MG8016E-i6-V2 ni motor isiyo na brashi yenye mchakato wa kupunguza wa sayari na vichanganuzi vya sumaku kwa matumizi ya uhamasishaji wa roboti na udhibiti wa mwendo. Imepangwa kwa uendeshaji wa 48V na inasaidia udhibiti na mawasiliano kupitia RS485 au CAN inapokuwa ikitumiwa na dereva unaofaa.
Vipengele Muhimu
- Nguvu ya juu ya pato, torque kubwa ya pato, usahihi wa juu
- Motor isiyo na brashi yenye nguvu kubwa
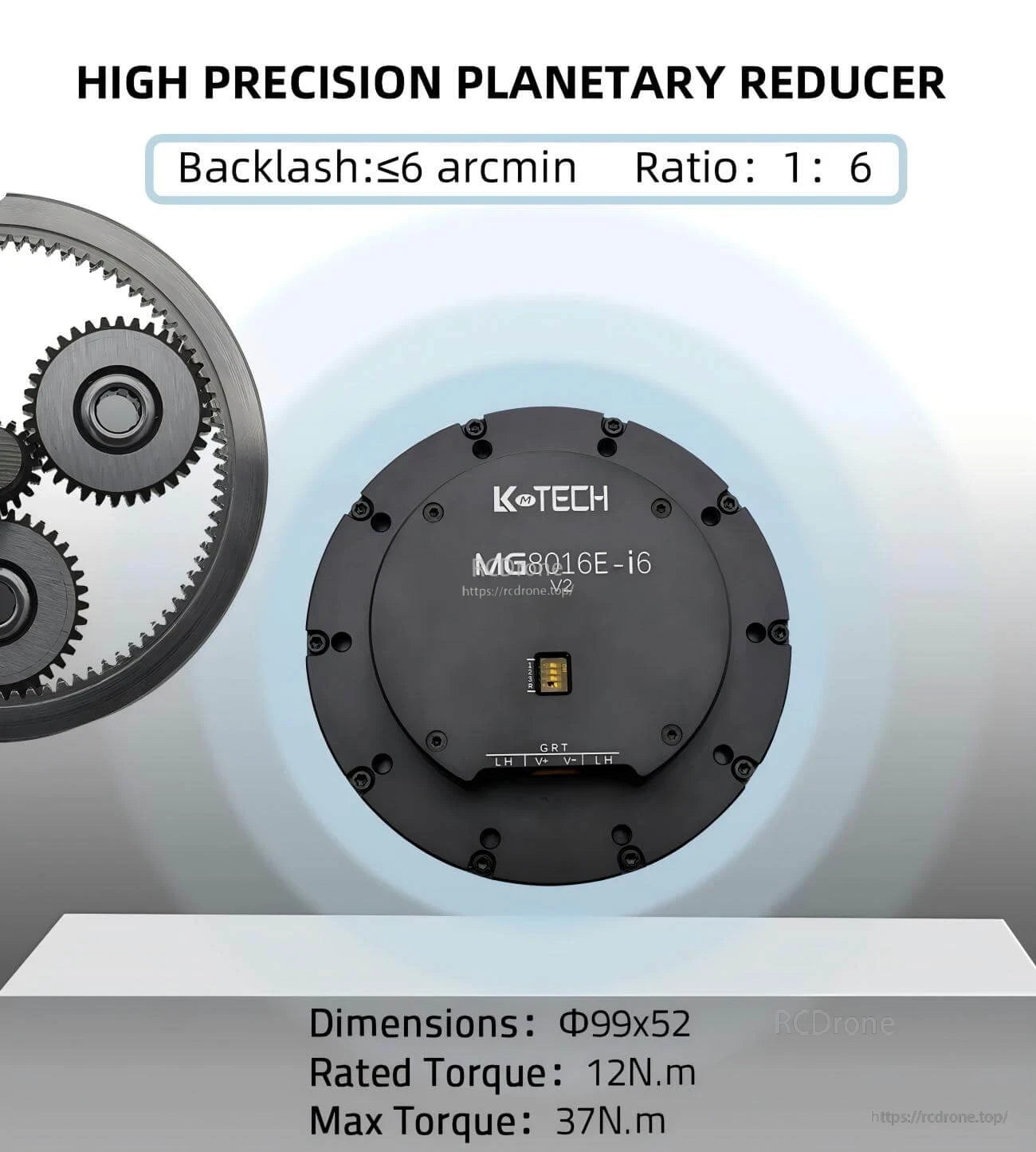
- Reducer ya sayari yenye usahihi wa juu (Backlash ≤6 arcmin, Uwiano 1:6)
- Encoders za magnetic: 18-bit (motor) na 14-bit (reducer)
- Uelewa wa nafasi kamili (duka moja); kalibrishaji moja, nafasi sifuri haipotei baada ya kupoteza nguvu
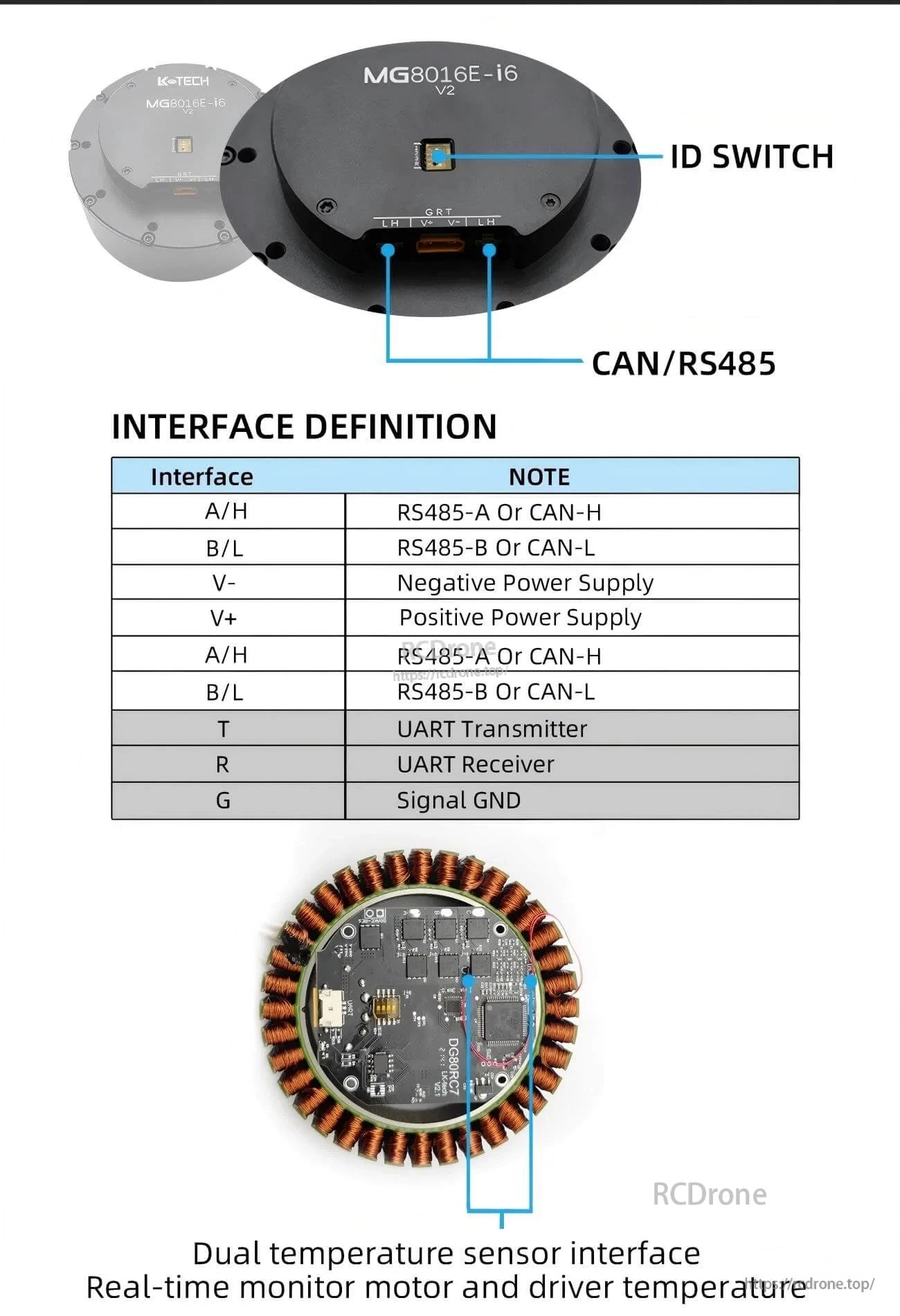
- Mawasiliano: RS485 au CAN (ikiwa na masafa maalum ya mawasiliano)
- Kiunganishi cha sensor ya joto mbili kwa ufuatiliaji wa wakati halisi wa joto la motor na dereva
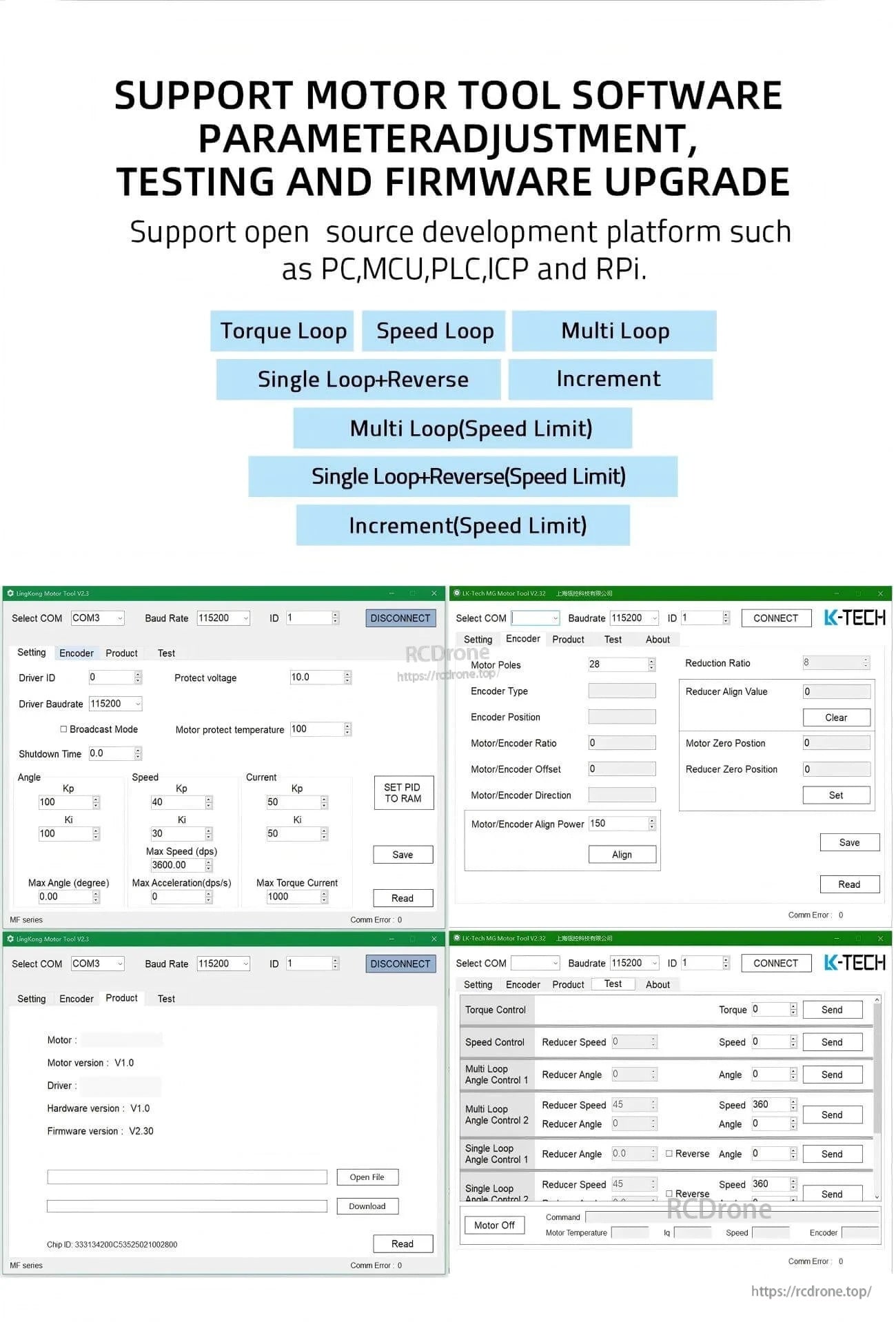
- Inasaidia programu za zana za motor kwa ajili ya marekebisho ya parameta, upimaji, na sasisho la firmware; inasaidia majukwaa ya maendeleo ya wazi kama vile PC, MCU, PLC, ICP, na RPi
Kwa ukaguzi wa ulinganifu kabla ya mauzo na msaada wa uunganisho, wasiliana na https://rcdrone.top/ au tuma barua pepe [email protected].
Maelezo
| Jina la Kitu | MG8016E-i6-V2 |
| Voltage Iliyoainishwa | 48V |
| Speed ya Juu | 300RPM |
| Torque Iliyoainishwa | 12N.m |
| Speed Iliyoainishwa | 258RPM |
| Current Iliyoainishwa | 8.4A |
| Power ya Juu | 670W |
| Torque ya Juu | 37N.m |
| Speed constant | 41.7rpm/V |
| Torque Constant | 0.24N.m/A |
| Zinazozunguka | 17 |
| Aina ya Winding | Δ |
| Upinzani wa Awamu | 0.6Ω |
| Inductance ya Awamu | 0.6mH |
| Nguzo za Motor | 40 |
| Inertia ya Rotor | 2570gcm² |
| Joto la Motor | NDIYO |
| Aina ya Reducer | PG5506 |
| Uwiano wa Kupunguza | 1:6 |
| Backlash | ≤6 arcmin |
| Mzigo Ulioidhinishwa wa Bearing | 1120N |
| Uzito wa Motor | 759g |
| Vipimo | Φ99x52 |
| Pendekeza Drive | DG60E |
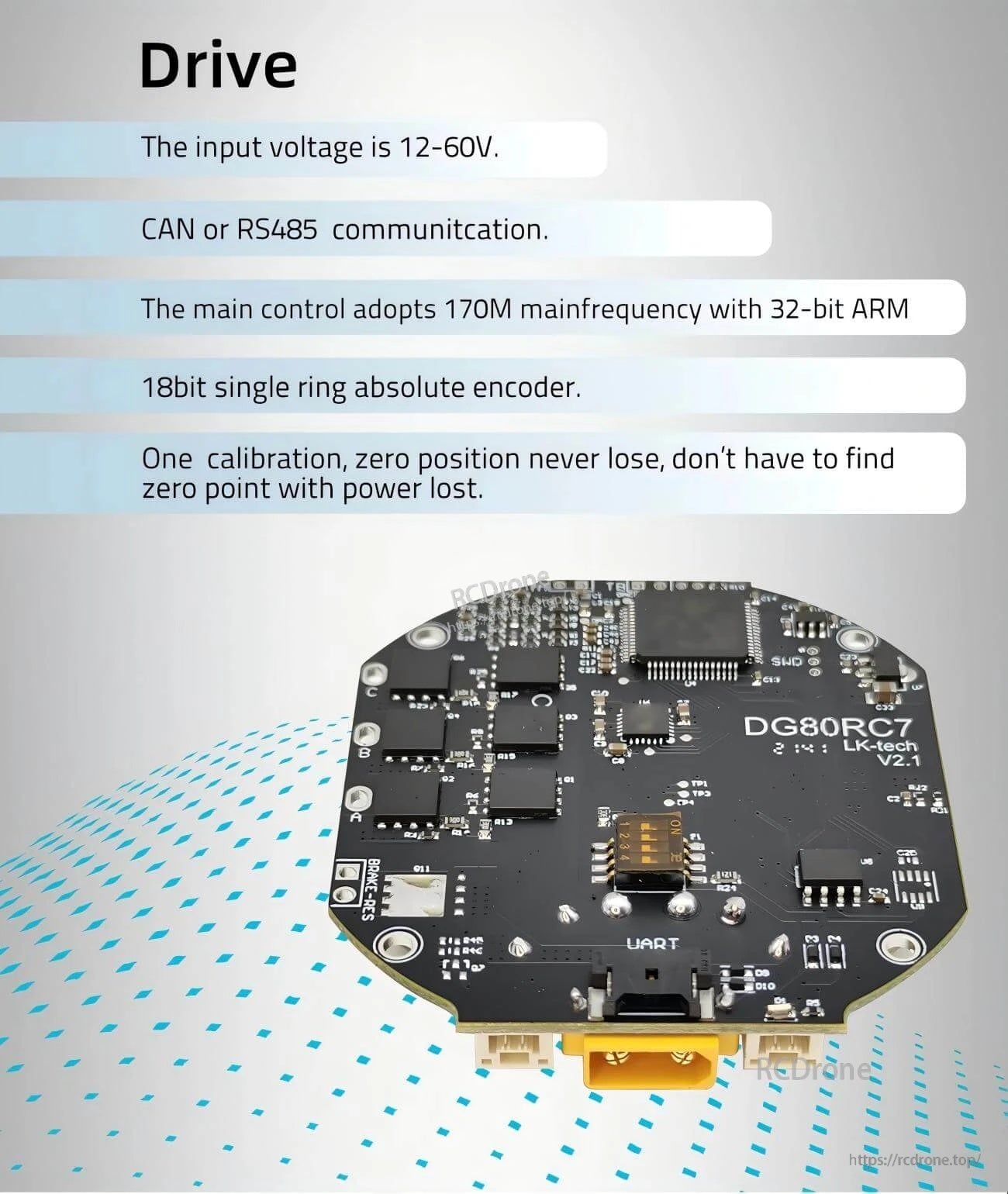
| Voltage ya Kuingiza Drive | 12-60V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18 bit(Motor)&14 bit(Reducer)Magnetic Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 1M |
| Control Mode | Torque Loop(32KHz)/Speed Loop(8KHz)/Position Loop(4KHz) |
| Acceleration curve | Trapeziod acceleration |
Interface Definition
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| V- | Nguvu hasi ya usambazaji |
| V+ | Nguvu chanya ya usambazaji |
| A/H | RS485-A au CAN-H |
| B/L | RS485-B au CAN-L |
| T | Mpokeaji wa UART |
| R | Mpokeaji wa UART |
| G | Alama GND |
Maombi
- Roboti za kibinadamu
- Vikono vya roboti
- Exoskeletons / roboti zinazovaa
- Roboti za mguu nne (mbwa roboti)
- Magari ya AGV (gari la AGV)
- Roboti za ARU
Maelekezo
Maelezo




Related Collections




