




LKMTECH MHF6015-V3 Motor 24V 872RPM 3N.m 19bit Kienkoda ya Sumaku RS485/CAN kwa Roboti
LKMTECH MHF6015-V3 Motor 24V 872RPM 3N.m 19bit Kienkoda ya Sumaku RS485/CAN kwa Roboti
LKMTECH
Couldn't load pickup availability
Muhtasari
Motor ya LKMTECH MHF6015-V3 ni motor isiyo na brashi ya 24V yenye encoder ya magnetic ya 19bit na mawasiliano ya RS485 au CAN, iliyoundwa kwa ajili ya matumizi ya mwendo wa roboti kama vile roboti za kibinadamu, mikono ya roboti, exoskeletons, na magari ya AGV.
Vipengele Muhimu
- Muundo uliojumuishwa: bodi ya kuendesha iliyojengwa ndani, MCU yenye utendaji wa juu, marekebisho ya vigezo vya mwenyeji, saizi ndogo na torque kubwa, encoder ya thamani halisi yenye usahihi wa juu.
- Muundo wa tupu; ukubwa wa tupu umeandikwa kama 12.7 mm (12.6 mm inaonyeshwa ndani ya alama ya tupu).
- Endesha kwa urahisi; cheti cha CE (kama ilivyoelezwa).
- Tamko la vifaa vya msingi: “Nyenzo ya msingi ya motor ni karatasi ya chuma ya silicon ya ubora wa juu na sumaku ya kudumu yenye nguvu ya joto la juu.”
- Tamko la rotor ya nje: “Muundo wa tambarare wa hatua nyingi wa rotor ya nje unatoa torque ya juu na unafaa kwa matumizi yanayohusiana na nafasi.
- Kauli ya kuzaa: “Muundo usio na brashi wenye kuzaa zenye utendaji wa juu kwa mzunguko laini na maisha marefu.”
- Kauli ya sampuli/udhibiti wa sasa: “Sampuli ya upinzani wa aloi iliyokolea kwa usahihi wa juu, udhibiti sahihi wa sasa.”
- Kauli ya kuendesha: “Kuendesha kwa daraja kamili la awamu tatu la N-tube, upinzani wa ndani wa chini, sasa ya juu.”
- Kauli ya udhibiti: “Mzunguko wa torque, kasi, hali ya udhibiti wa nafasi inaweza kubadilishwa bila mpangilio.”
- Kauli ya vigezo/vipimo/masasisho ya firmware ya mwenyeji; inasaidia majukwaa ya maendeleo ya chanzo wazi kama vile PC, MCU, PLC, ICP na RPi.
- Kauli ya hali: Hali ya torque / Hali ya kasi / hali ya udhibiti wa mizunguko mingi / hali ya nafasi ya mzunguko mmoja + mwelekeo / hali ya nafasi ya kuongezeka; hali ya udhibiti wa mizunguko mingi (ikiwa na kikomo cha kasi) / hali ya nafasi ya mzunguko mmoja + mwelekeo (ikiwa na kikomo cha kasi) / hali ya nafasi ya kuongezeka (ikiwa na kikomo cha kasi).
Maelezo
| Jina la Kitu | MHF6015-V3 |
| Zinazozunguka | 25 |
| Voltage Iliyoainishwa | 24V |
| Speed ya Juu | 872RPM |
| Torque Iliyoainishwa | 0.82N.m |
| Speed Iliyoainishwa | 560RPM |
| Current Iliyoainishwa | 3.1A |
| Power ya Juu | 57W |
| Torque ya Juu | 3N.m |
| Speed constant | 23.3rpm/V |
| Torque Constant | 0.26N.m/A |
| Aina ya Winding | Y |
| Upinzani wa Awamu | 2.17Ω |
| Inductance ya Awamu | 1.44mH |
| Nguzo za Motor | 28 |
| Inertia ya Rotor | 515gcm² |
| Joto la Motor | NDIYO |
| Mzigo Ulioidhinishwa wa Kijiko | 280N |
| Uzito wa Motor | 251g |
| Pendekeza Drive | DHF50 |
| Voltage ya Kuingiza Drive | 7.4-32V |
| Mawasiliano | RS485 AU CAN |
| Masafa ya Mawasiliano | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 19bit Magnetic Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 100K, 125K, 250K, 500K, 1M |
| Njia ya Kudhibiti | Torque Loop(24KHz)/Speed Loop(8KHz)/Position Loop(8KHz) |
| Kuongeza curve | Kuongeza trapeziod |
Kwa mwongozo wa uchaguzi au msaada wa uunganisho, wasiliana na timu ya huduma kwa wateja kwa https://rcdrone.top/ au barua pepe [email protected].
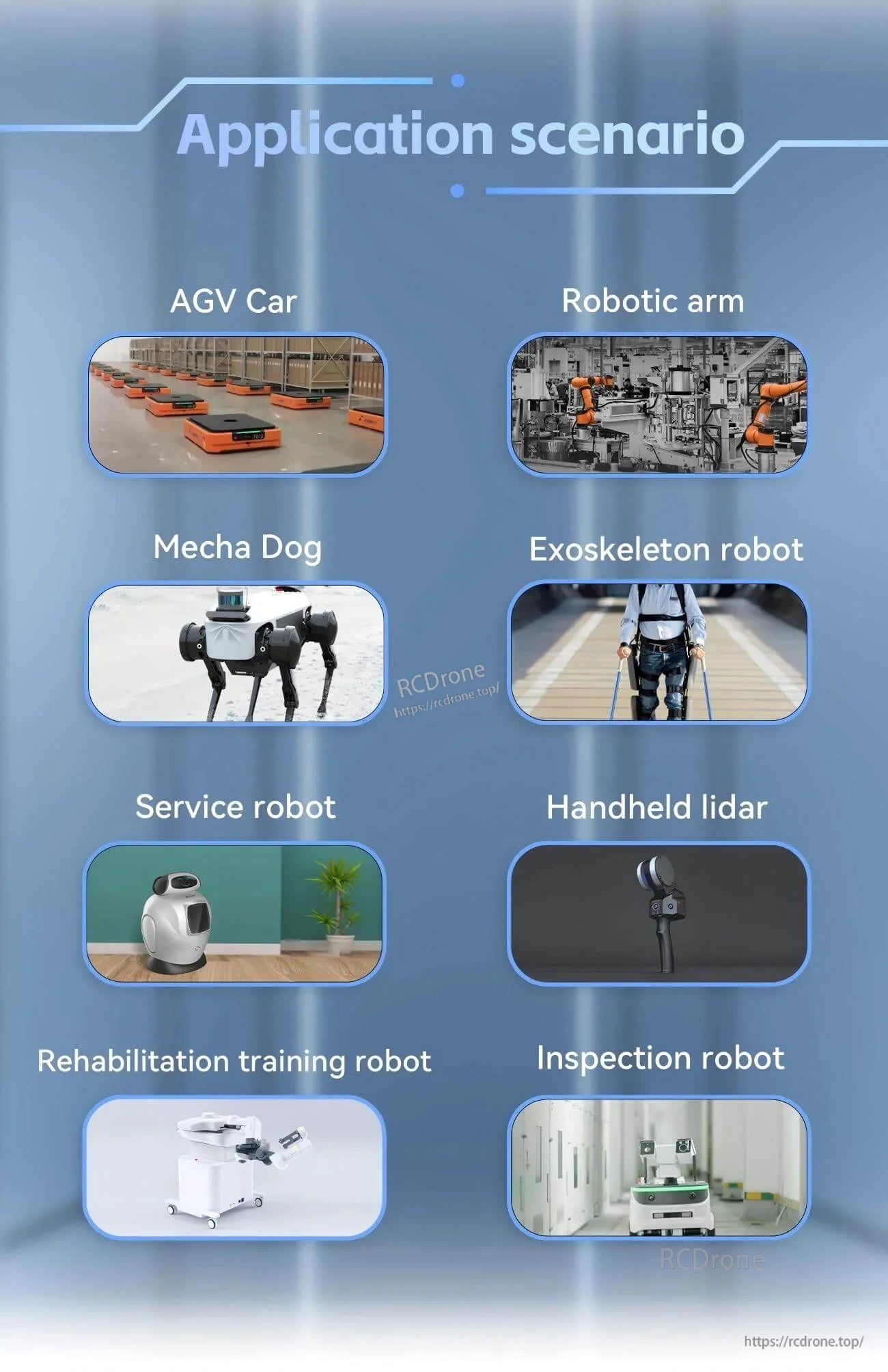
Maombi
- Roboti za kibinadamu
- Michemu za roboti
- Exoskeletons / roboti wa exoskeleton
- Roboti wa mguu minne / mbwa mecha
- Magari ya AGV / gari la AGV
- Roboti za ARU
- Roboti ya huduma
- Lidar ya mkono
- Roboti wa mafunzo ya urejeleaji
- Roboti wa ukaguzi
Maelekezo / Hati
Maelezo

Muundo wa motor wa servo-aina umeweka wiring na mkusanyiko kuwa rahisi kwa viungo vya roboti.
Bodi ya kuendesha iliyounganishwa na MCU inasaidia kurekebisha vigezo kutoka kwa mwenyeji kwa urahisi wa kuanzisha.
 Mpangilio wa shimo (12.7 mm bore) husaidia kupitisha nyaya au shafii kupitia motor kwa ujenzi safi zaidi.
Mpangilio wa shimo (12.7 mm bore) husaidia kupitisha nyaya au shafii kupitia motor kwa ujenzi safi zaidi.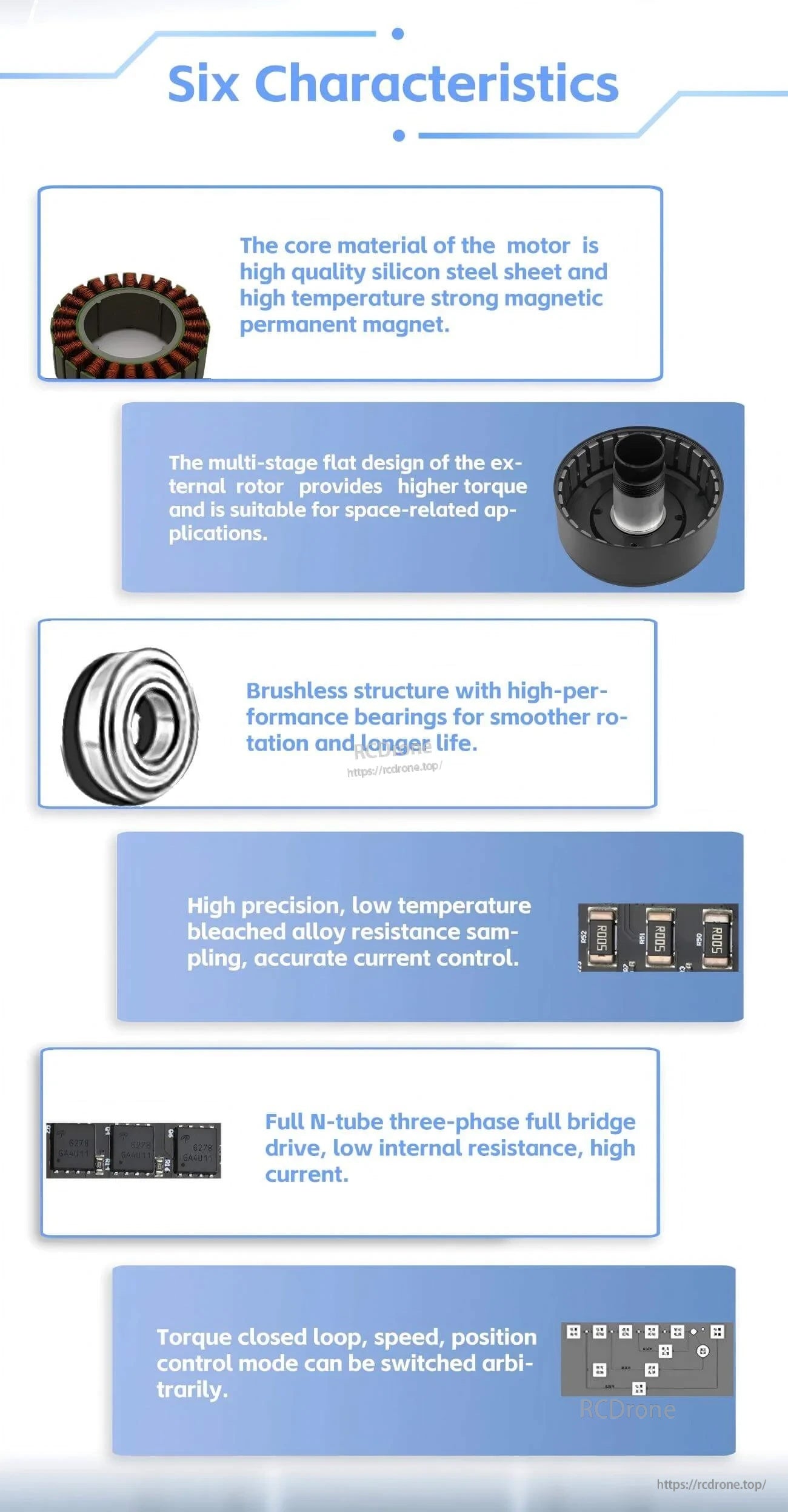
Maelezo muhimu ya muundo yanashughulikia vifaa, muundo wa torque wa rotor wa nje, kubebea, na uwezo wa udhibiti wa mzunguko uliofungwa.
Imepangwa kwa kazi za mwendo wa roboti kama AGVs, mikono ya roboti, wanyama wanne, mifupa ya nje, na roboti za huduma.
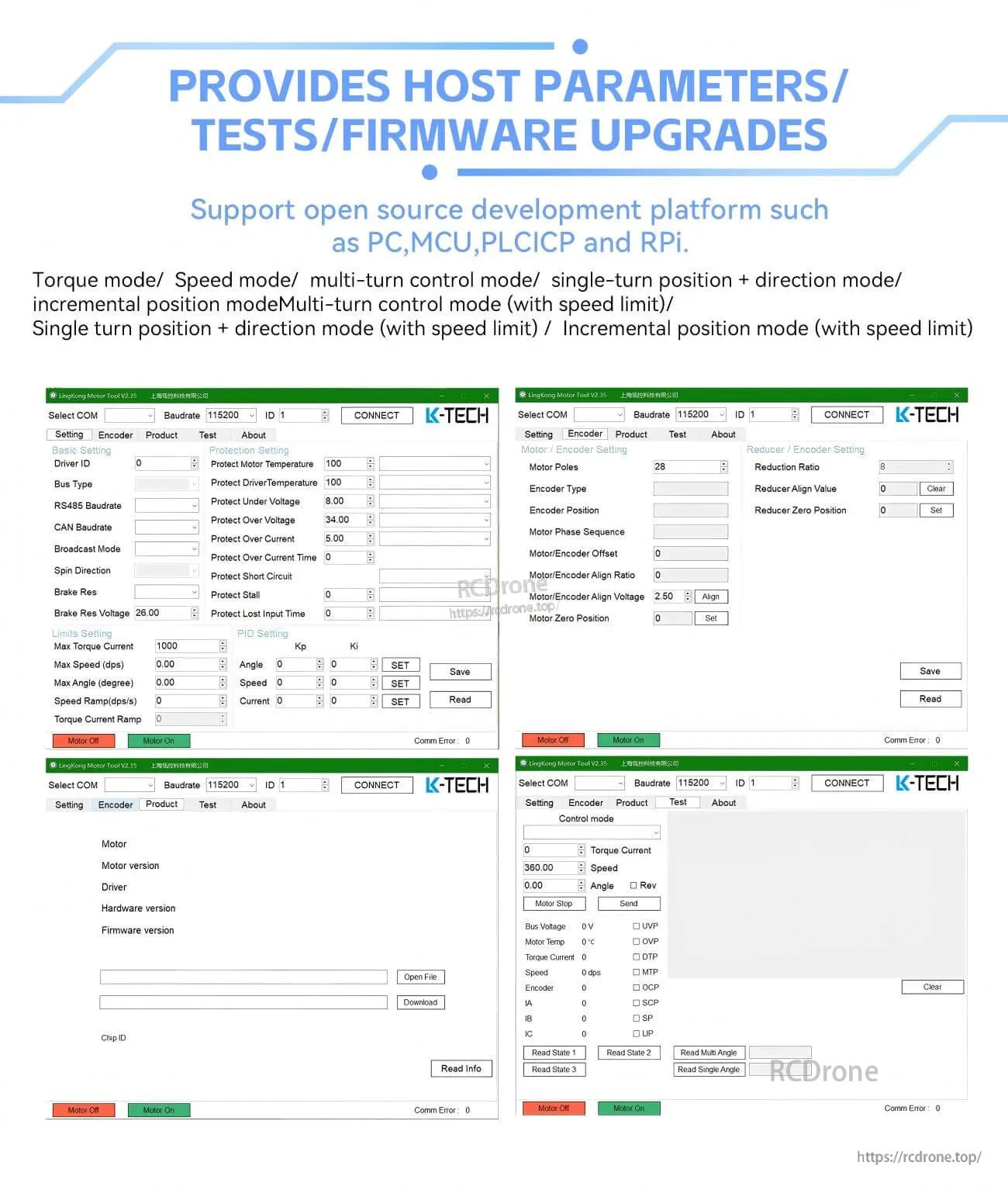
Kurasa za programu za PC zinaonyesha mipangilio ya vigezo, kazi za majaribio, na msaada wa sasisho la firmware.

Related Collections




