Bodi ya Kigeuzi ya Matek AP Periph CAN Node CAN-G474 DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
Bodi ya Kigeuzi ya Matek AP Periph CAN Node CAN-G474 DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
Couldn't load pickup availability
Muhtasari
Node hii ya AP Periph CAN, Matek Node ya AP Periph CAN CAN-G474, ni node ya adapter ya ArduPilot AP_Periph iliyoundwa kuongeza vifaa vya ziada kwenye basi la DroneCAN kwa kutumia transceiver ya CAN ya 5Mbit/s na MCU ya STM32G474. Inaruhusu sensorer zinazoungwa mkono na ArduPilot na vifaa vya ziada vinavyotumia GPIO (kama vile matokeo ya PWM na moduli za kuarifu LED) kuunganishwa kupitia DroneCAN.
Vipengele Muhimu
- Adapter node inayotegemea ArduPilot AP_Periph firmware
- STM32G474CE MCU yenye 512KB Flash
- Vifaa vinavyoweza CANFD na msaada wa CAN/CANFD kutoka 1Mbit ~ 5Mbit
- 2x basi za CAN
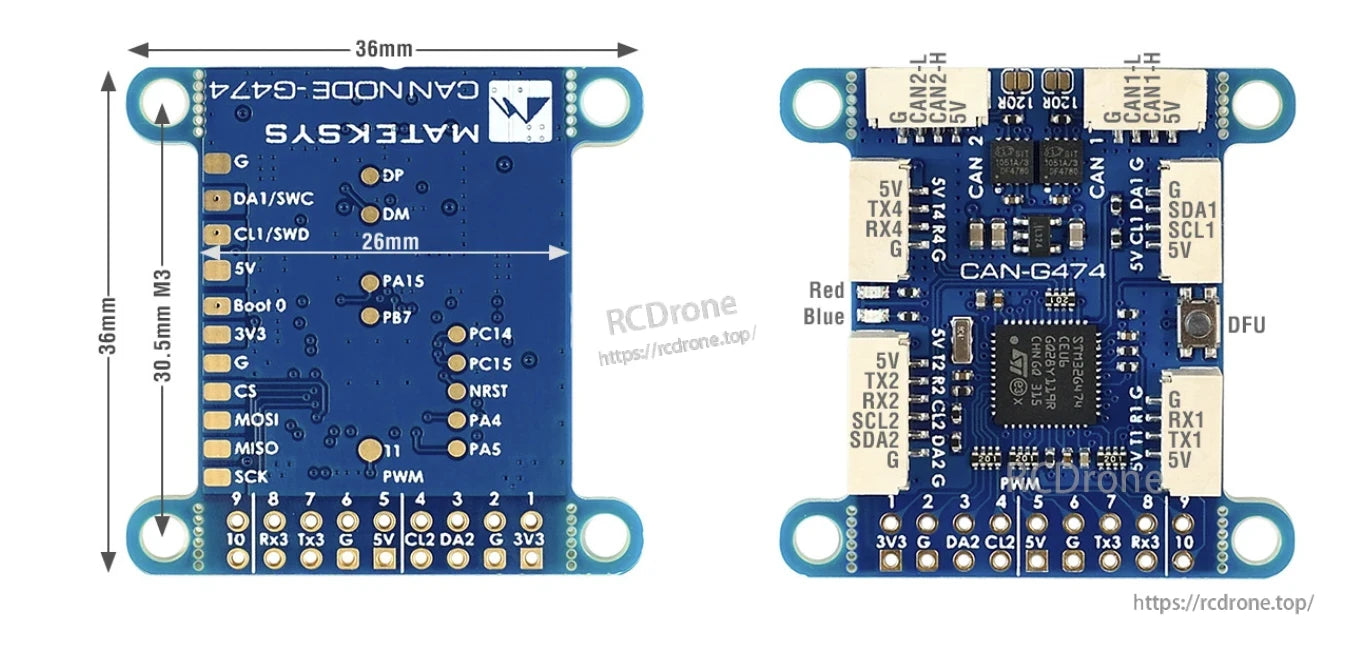
- 4x UARTs kwa GNSS, Rangefinder, Proximity, EFI, ingizo la RC (mpokeaji); MSP imewezeshwa kwenye TX3 kwa chaguo-msingi kwa GNSS, Compass, Barometer kupitia MSP
- 2x basi za I2C kwa vifaa vya I2C (sensor ya kasi ya hewa, Barometer, Compass)
- 1x SPI kwa RM3100 (SPI pads kwenye upande wa chini zikiwa na “CS, MOSI, MISO, SCK” silkprint)
- 11x PWM matokeo kwa Servos na ESC; PWM zote zinasaidia DMA/DShot (PWM1-10 kwenye DuPont 2.54mm mashimo; PWM11 pad kwenye upande wa chini na “11” silkprint)
- Msaada wa sasisho la firmware kupitia Zana ya DroneCAN GUI / Mpango wa Misheni (Tab ya DroneCAN) na kupitia hali ya DFU ya STM32CubeProgrammer (UART1)
Mifano
| MCU | STM32G474CE |
| Flash | 512KB |
| Kiwango cha data cha transceiver ya CAN | Hadi 5Mbit/s |
| Msaada wa CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| Basi la CAN | 2x |
| UART | 4x (MSP imewezeshwa kwenye TX3 kwa default) |
| I2C | 2x |
| SPI | 1x (kwa RM3100) |
| PWM matokeo | 11x (PWM1-10 kwenye DuPont 2.54mm mashimo; PWM11 pad kwenye upande wa chini) |
| Kosa | ST kosa, SWC & SWD (kwenye upande wa chini) |
| Sasisho la firmware (DFU) | UART1 (TX1, RX1) |
| Viashiria vya LED | Bluu inang'ara haraka: Inaanza; Bluu inang'ara polepole: inawasiliana na kidhibiti cha ndege; Nyekundu: kiashiria cha 3.3V |
| Kiwango cha voltage ya kuingiza | 4.5~5.5V @5V pad/pin& |
| Matumizi ya nguvu | 62mA |
| Joto la kufanya kazi | -30~85 °C |
| Viunganishi | 5x JST-GH-4P (SM04B-GHS-TB) kwa CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) kwa UART3+I2C2 |
| Mashimo ya kupita | 18x DuPont 2.54mm mashimo |
| Ukubwa wa bodi | 36mm*36mm*6mm |
| Uzito | 5.2g |
| Kuweka | 30.5mm 4x Dia.3mm |
Nini Kimejumuishwa
- 1x bodi ya CAN-G474
- 2x waya ya silicon ya JST-GH-4P hadi JST-GH-4P 20cm
- 1x waya ya silicon ya JST-GH-6P hadi JST-GH-6P 20cm
Huduma kwa wateja: https://rcdrone.top/ au [email protected]
Matumizi
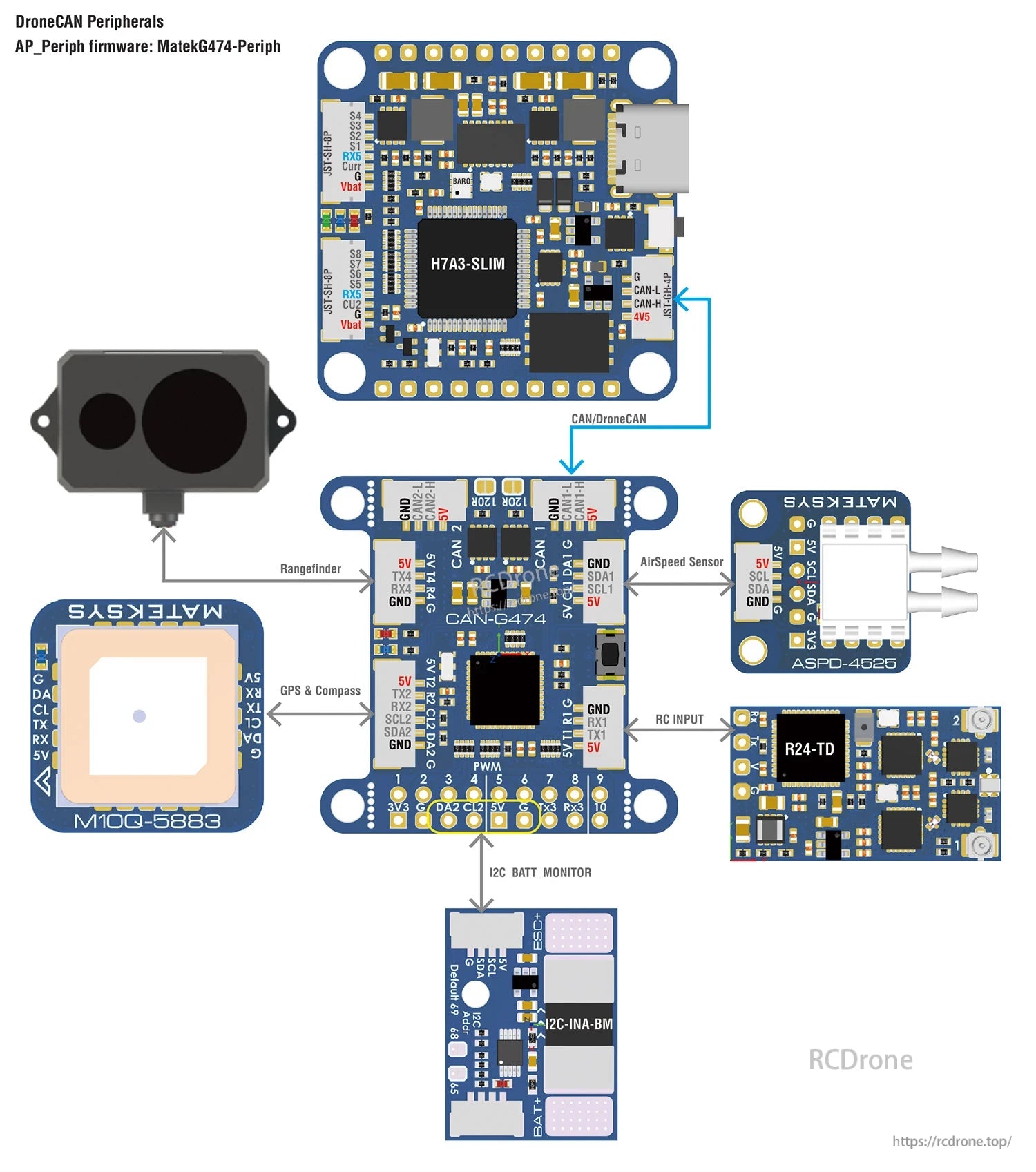
- Badilisha vifaa vinavyoungwa mkono na ArduPilot kuwa vifaa vya DroneCAN bus (GNSS, Kompas, Barometer, sensor ya kasi ya hewa, Rangefinder, sensor ya karibu, Injini za mafuta za kielektroniki)
- Vifaa vinavyotumia GPIO kwenye DroneCAN, ikiwa ni pamoja na moduli za PWM na LED notify
- Mifano ya muunganisho wa vifaa inaonyeshwa: Rangefinder, GPS & Kompas, Sensor ya Kasi ya Hewa, RC INPUT, I2C BATT_MONITOR
- Chaguo la ziada: ungana na moja ya CAN bus kwa kidhibiti cha ndege, au ungana na zote mbili
Miongozo
- Pakua firmware (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (kwa sensorer za pembeni)
- MatekG474-DShot (kwa DroneCAN-PWM pato)
- Njia za sasisho
- Zana ya GUI ya DroneCAN au Mpango wa Misheni – Tab ya DroneCAN, pakia “AP_Periph.bin”
- Hali ya DFU ya STM32CubeProgrammer: ung'anisha moduli ya USB-TTL kwenye UART1, ingiza USB huku ukishikilia kitufe cha DFU, pakia “AP_Periph_with_bl.hex”
- Faili ya 3D: CAN-G474_STEP.zip
- Mafunzo: Kutumia adapters za MatekL431 kwa PWM na DShot
Maelezo
Bodi ya Matek CAN-G474 inatoa bandari ya DroneCAN/CAN pamoja na UART, I2C, na pad za PWM kwa kuunganisha vifaa vya kawaida vya autopilot.Bodi ya Matek CAN-G474 inajihusisha na basi ya CAN/DroneCAN na inatoa hadi matokeo 10 ya PWM kwa ajili ya servos au ESCs.
Related Collections